Вам также может понравиться
- Lec17 PDFДокумент15 страницLec17 PDFAhmad AbunassarОценок пока нет
- Lec 38Документ18 страницLec 38yuffgjfhОценок пока нет
- File PIbpjDENlДокумент8 страницFile PIbpjDENlSunil KumarОценок пока нет
- Lec 30Документ8 страницLec 30Piyush KumarОценок пока нет
- VNA Hfst4 Resonant CuitcuitsДокумент10 страницVNA Hfst4 Resonant CuitcuitsFernando MartinОценок пока нет
- Lec 51Документ25 страницLec 51Chintha VenuОценок пока нет
- Common Gate Circuit PDFДокумент15 страницCommon Gate Circuit PDFVishnu KSОценок пока нет
- ETIN25 - Analogue IC Design Laboratory Manual - Lab 2: Jonas Lindstrand Martin Liliebladh Markus Törmänen September 2011Документ14 страницETIN25 - Analogue IC Design Laboratory Manual - Lab 2: Jonas Lindstrand Martin Liliebladh Markus Törmänen September 2011Western777Оценок пока нет
- A Generalized Amplifier and The Miller-Effect Paradox - EDNДокумент12 страницA Generalized Amplifier and The Miller-Effect Paradox - EDNJose Leonardo Simancas GarciaОценок пока нет
- Lecture 6: Time-Dependent Behaviour of Digital Circuits: Source Load DДокумент5 страницLecture 6: Time-Dependent Behaviour of Digital Circuits: Source Load DTaqi Shah100% (1)
- Review of Mosfet Capacitances: The Capacitances Usually Given in FF/ MДокумент46 страницReview of Mosfet Capacitances: The Capacitances Usually Given in FF/ MSalim SanОценок пока нет
- Microwave Solid State Diode Oscillator and AmplifierДокумент20 страницMicrowave Solid State Diode Oscillator and AmplifierdhanarajОценок пока нет
- Power Electronics Prof. B.G. Fernandes Department of Electrical Engineering Indian Institute of Technology, Bombay Lecture - 15Документ20 страницPower Electronics Prof. B.G. Fernandes Department of Electrical Engineering Indian Institute of Technology, Bombay Lecture - 15sunitha vОценок пока нет
- Lec50 PDFДокумент18 страницLec50 PDFabm999Оценок пока нет
- Power Electronics Prof. B.G. Fernandes Department of Electrical Engineering Indian Institute of Technology, Bombay Lecture - 27Документ16 страницPower Electronics Prof. B.G. Fernandes Department of Electrical Engineering Indian Institute of Technology, Bombay Lecture - 27durgeshОценок пока нет
- Lec6 PDFДокумент14 страницLec6 PDFARIJIT ROYОценок пока нет
- ElektronikaДокумент26 страницElektronikamilos obilicОценок пока нет
- Lec8 2Документ12 страницLec8 2mrd9991Оценок пока нет
- Lec 22Документ19 страницLec 22Anshuman MitraОценок пока нет
- SMPS Space Vector ImplementationДокумент26 страницSMPS Space Vector ImplementationJohn LockОценок пока нет
- Feedback AmlifiersДокумент32 страницыFeedback AmlifiersNarayana Rao RevallaОценок пока нет
- Capacitor Energy Transfer V1.0Документ34 страницыCapacitor Energy Transfer V1.0frankidelОценок пока нет
- Capacitor Energy Transfer V1.0 PDFДокумент34 страницыCapacitor Energy Transfer V1.0 PDFMugilan MohanОценок пока нет
- PWM AC-DC Converter LectureДокумент18 страницPWM AC-DC Converter LectureDebashis ChakrabrtyОценок пока нет
- Parallel Operation of TransformersДокумент13 страницParallel Operation of TransformersClement Raj100% (1)
- 02 - Sect 7 5 The Canonical Model - enДокумент5 страниц02 - Sect 7 5 The Canonical Model - enAnanatha KarthikОценок пока нет
- Lec4 1Документ31 страницаLec4 1suryashОценок пока нет
- LC Ladder Matching NetworksДокумент33 страницыLC Ladder Matching NetworksCarriceiros TourОценок пока нет
- REPORTДокумент6 страницREPORTchienphamminh2003Оценок пока нет
- Design Op-AmpДокумент5 страницDesign Op-AmpSuyog DhakneОценок пока нет
- CMOS Logic FundamentalsДокумент16 страницCMOS Logic FundamentalsAkhil M PОценок пока нет
- 6.002 Spring 2019 Lab 12 QuestionsДокумент5 страниц6.002 Spring 2019 Lab 12 QuestionsMatt StapleОценок пока нет
- Joule ThiefДокумент11 страницJoule Thiefjkirwan100% (2)
- Lecture 5: Physical Realisation of Logic Gates: DOC112: Computer Hardware Lecture 5 1Документ4 страницыLecture 5: Physical Realisation of Logic Gates: DOC112: Computer Hardware Lecture 5 1Taqi Shah100% (1)
- Microwave Integrated Circuits: Couplers ExplainedДокумент15 страницMicrowave Integrated Circuits: Couplers Explainedmrd9991Оценок пока нет
- Sureshsir Transcribe FBC SPWMДокумент19 страницSureshsir Transcribe FBC SPWMpriyanshum230825eeОценок пока нет
- Physical Realization of Logic GatesДокумент4 страницыPhysical Realization of Logic GatesDebashish PalОценок пока нет
- Lec 33Документ12 страницLec 33herber_28Оценок пока нет
- New approaches for reducing harmonics in solar invertersДокумент5 страницNew approaches for reducing harmonics in solar invertersSanjana JadhavОценок пока нет
- Power ElectronicsДокумент15 страницPower ElectronicsdurgeshОценок пока нет
- 3 Circuit Analysis in Frequency Domain: 3.1 Complex Algebra and NotationДокумент4 страницы3 Circuit Analysis in Frequency Domain: 3.1 Complex Algebra and NotationZafar AliОценок пока нет
- Electrical HerrmannДокумент14 страницElectrical HerrmannMauro Ferreira De LimaОценок пока нет
- Rail-to-Rail Op Amps ExplainedДокумент115 страницRail-to-Rail Op Amps Explainedrayle242Оценок пока нет
- Design stable transimpedance amplifiers with optimum feedback capacitorsДокумент5 страницDesign stable transimpedance amplifiers with optimum feedback capacitorsBandi Ravi KumarОценок пока нет
- Transcription T1Документ19 страницTranscription T1hello worldОценок пока нет
- Transmission Lines and E.M. Waves Prof R.K. Shevgaonkar Department of Electrical Engineering Indian Institute of Technology Bombay Lecture-6Документ32 страницыTransmission Lines and E.M. Waves Prof R.K. Shevgaonkar Department of Electrical Engineering Indian Institute of Technology Bombay Lecture-6mrd9991Оценок пока нет
- ESR Capacitor Meter ProjectДокумент22 страницыESR Capacitor Meter ProjectmisiracОценок пока нет
- RFIC LNA 3 S. ChatterjeeДокумент15 страницRFIC LNA 3 S. ChatterjeePraful KabadiОценок пока нет
- Low Power VLSI Circuits and Systems Prof. Ajit Pal Department of Computer Science and Engineering Indian Institute of Technology, KharagpurДокумент27 страницLow Power VLSI Circuits and Systems Prof. Ajit Pal Department of Computer Science and Engineering Indian Institute of Technology, KharagpurHimaja DasariОценок пока нет
- Tronics 6Документ2 страницыTronics 6Treksha DCОценок пока нет
- Transmission Lines: Impedance Transformation and Power TransferДокумент34 страницыTransmission Lines: Impedance Transformation and Power TransferVishnu ShashankОценок пока нет
- Integrator and DifferentiatorДокумент7 страницIntegrator and DifferentiatorManoj KavediaОценок пока нет
- Diodes Clipping and Clamping Circuits ExperimentДокумент15 страницDiodes Clipping and Clamping Circuits ExperimentAyeshaОценок пока нет
- Powe Prof. B Electric An Institute Le Er Electronic B.G Fernand Cal Engineer of Technolo Ecture - 16 Cs Des Ring Ogy, Bomba AyДокумент18 страницPowe Prof. B Electric An Institute Le Er Electronic B.G Fernand Cal Engineer of Technolo Ecture - 16 Cs Des Ring Ogy, Bomba AyDebashis ChakrabrtyОценок пока нет
- Understanding Attenuators and Compensation: R R V R V R R R V VДокумент7 страницUnderstanding Attenuators and Compensation: R R V R V R R R V Vnithinjose4uОценок пока нет
- Cmos Comparator: Term Paper Eem-511: Analog Electronics DesignДокумент11 страницCmos Comparator: Term Paper Eem-511: Analog Electronics Designvipul4792Оценок пока нет
- Lec 21Документ19 страницLec 21Shrinath KannanОценок пока нет
- Easy(er) Electrical Principles for General Class Ham License (2015-2019)От EverandEasy(er) Electrical Principles for General Class Ham License (2015-2019)Рейтинг: 5 из 5 звезд5/5 (1)
- Easy(er) Electrical Principles for General Class Ham License (2019-2023)От EverandEasy(er) Electrical Principles for General Class Ham License (2019-2023)Оценок пока нет
- Easy(er) Electrical Principles for Extra Class Ham License (2012-2016)От EverandEasy(er) Electrical Principles for Extra Class Ham License (2012-2016)Оценок пока нет
- Xpsib005en G Refguide Lims BridgeДокумент25 страницXpsib005en G Refguide Lims BridgeAhmad AbunassarОценок пока нет
- 916 Ti Touch: ManualДокумент509 страниц916 Ti Touch: ManualAhmad AbunassarОценок пока нет
- Cap Study GuideДокумент58 страницCap Study GuideTruong Quang HuyОценок пока нет
- Easymatch QCДокумент366 страницEasymatch QCAhmad AbunassarОценок пока нет
- Optimal Detection Vector AWGN ChannelДокумент24 страницыOptimal Detection Vector AWGN ChannelAhmad AbunassarОценок пока нет
- ISA CAP 2012 Job Analysis Study Blueprint Classification FinalДокумент10 страницISA CAP 2012 Job Analysis Study Blueprint Classification FinalAhmad AbunassarОценок пока нет
- CAP Classification System FinalДокумент22 страницыCAP Classification System FinalAhmad AbunassarОценок пока нет
- Integration of The DR 3900 Into A Wireless Local Area Network (WLAN)Документ7 страницIntegration of The DR 3900 Into A Wireless Local Area Network (WLAN)Ahmad AbunassarОценок пока нет
- Absorcion Agilent ManualДокумент64 страницыAbsorcion Agilent ManualRuben MartinezОценок пока нет
- Agilent I/O Connectivity: For Easy PC-to-instrument ConnectionДокумент19 страницAgilent I/O Connectivity: For Easy PC-to-instrument ConnectionAhmad AbunassarОценок пока нет
- Overview of Spectraa-300/400 Software Capability: Application NoteДокумент10 страницOverview of Spectraa-300/400 Software Capability: Application NoteAhmad AbunassarОценок пока нет
- Link2Sc: User Manual Manuel D'utilisation Manual Del Usuario Manual Do UsuárioДокумент30 страницLink2Sc: User Manual Manuel D'utilisation Manual Del Usuario Manual Do UsuárioAhmad AbunassarОценок пока нет
- The Gram Schmidt AlgorthmДокумент3 страницыThe Gram Schmidt AlgorthmkvdornОценок пока нет
- CH4 Introduction To SearchДокумент20 страницCH4 Introduction To SearchAhmad AbunassarОценок пока нет
- I - Control Basics: Reasons For DocumentationДокумент13 страницI - Control Basics: Reasons For DocumentationAhmad AbunassarОценок пока нет
- Error Probability for Bandlimited SignalingДокумент29 страницError Probability for Bandlimited SignalingAhmad AbunassarОценок пока нет
- Ch5 State Space Search Methods MasterДокумент35 страницCh5 State Space Search Methods MasterAhmad AbunassarОценок пока нет
- CH 5 AN OPTIMAL SEARCH ALGORITHM M Part 2Документ15 страницCH 5 AN OPTIMAL SEARCH ALGORITHM M Part 2Ahmad AbunassarОценок пока нет
- DigitCom Week 2 2021 DrTahatДокумент30 страницDigitCom Week 2 2021 DrTahatAhmad AbunassarОценок пока нет
- De Series SolДокумент31 страницаDe Series SolWarlley Batista de DeusОценок пока нет
- Bessel Equations and Bessel Functions: X 0 by S DsДокумент18 страницBessel Equations and Bessel Functions: X 0 by S DsOGUNWOLE PHILLIP OLUWAYEMIОценок пока нет
- Slides 2012dsfДокумент226 страницSlides 2012dsfAndrés LeyvaОценок пока нет
- Yazeed Rbeihat 20208013 Digital Communications HW2Документ6 страницYazeed Rbeihat 20208013 Digital Communications HW2Ahmad AbunassarОценок пока нет
- Optimal Detection Vector AWGN ChannelДокумент24 страницыOptimal Detection Vector AWGN ChannelAhmad AbunassarОценок пока нет
- Digital Communications Homework #4 on 8-PSK ModulationДокумент8 страницDigital Communications Homework #4 on 8-PSK ModulationAhmad AbunassarОценок пока нет
- Behzad - Razavi ANALOG IC DESIGN (VLSID)Документ706 страницBehzad - Razavi ANALOG IC DESIGN (VLSID)vasece4537577100% (16)
- Signaling Schemes with MemoryДокумент30 страницSignaling Schemes with MemoryAhmad AbunassarОценок пока нет
- Chapter 6: Interrupts and Resets: Fundamental Concepts of InterruptsДокумент22 страницыChapter 6: Interrupts and Resets: Fundamental Concepts of InterruptsAhmad AbunassarОценок пока нет
- Week 9: 4 Optimum Receivers For AWGN Channels 4 Optimum Receivers For AWGN ChannelsДокумент14 страницWeek 9: 4 Optimum Receivers For AWGN Channels 4 Optimum Receivers For AWGN ChannelsAhmad AbunassarОценок пока нет
- Chapter 4: Advanced Assembly Programming: The HCS12/MC9S12 MicrocontrollerДокумент19 страницChapter 4: Advanced Assembly Programming: The HCS12/MC9S12 MicrocontrollerAhmad AbunassarОценок пока нет
- Multi VibratorsДокумент13 страницMulti VibratorsSuhaila ctОценок пока нет
- Chapter 20 - Current Mirrors: - Input SideДокумент7 страницChapter 20 - Current Mirrors: - Input SideJesus SalvadorОценок пока нет
- Cascode Amplifier: Exp - No: 5 Date: 20-9-2021Документ9 страницCascode Amplifier: Exp - No: 5 Date: 20-9-2021annambaka satishОценок пока нет
- Enhancement MOSFET: Biasing Techniques of MosfetДокумент10 страницEnhancement MOSFET: Biasing Techniques of MosfetNaveen ReddyОценок пока нет
- Current Mirrors: Coyright Susanta Sengupta @IIT JammuДокумент86 страницCurrent Mirrors: Coyright Susanta Sengupta @IIT JammuVivek SinghОценок пока нет
- X1M Agc ManualДокумент7 страницX1M Agc ManualapsОценок пока нет
- Power AmplifierДокумент37 страницPower AmplifierSristick100% (6)
- Versatile In-Amp Signal Processing AmplifierДокумент8 страницVersatile In-Amp Signal Processing AmplifierNima MoeenОценок пока нет
- Zero Crossing Detector Using 741 ICДокумент13 страницZero Crossing Detector Using 741 ICkapil chander100% (1)
- 7 Thevenin Theorem PDFДокумент18 страниц7 Thevenin Theorem PDFMUHAMMAD HASEEB ASHRAF MUHAMMAD ASHRAFОценок пока нет
- Schematic, Amplifier Channel, Ex 2500 Schematic, Amplifier Channel, Ex 2500Документ5 страницSchematic, Amplifier Channel, Ex 2500 Schematic, Amplifier Channel, Ex 2500cesar mierОценок пока нет
- EE220HW#2 SolutionДокумент4 страницыEE220HW#2 SolutionDiego Aaron Munoz100% (1)
- John Errington's Tutorial On Power Supply Design: Full Circuit DiagramДокумент2 страницыJohn Errington's Tutorial On Power Supply Design: Full Circuit DiagramDai NgoОценок пока нет
- Lecture 11 - Opaerational Amplifiers-3Документ48 страницLecture 11 - Opaerational Amplifiers-3Kamran AbdullahОценок пока нет
- Phase Shift Provided by One Phase Shift Network in RC Phase Shift Oscillator in 3 Stage IsДокумент5 страницPhase Shift Provided by One Phase Shift Network in RC Phase Shift Oscillator in 3 Stage IsJoyce GeorgeОценок пока нет
- Non InvertingДокумент7 страницNon InvertingVinay Yadav100% (1)
- 7.chapter7 - Operational AmplifierДокумент36 страниц7.chapter7 - Operational Amplifierngoc an nguyenОценок пока нет
- Ect202 Analog Circuits, June 2022Документ3 страницыEct202 Analog Circuits, June 2022instapc0210Оценок пока нет
- Engineering Circuit Analysis-CH3Документ24 страницыEngineering Circuit Analysis-CH3Brenda Michelle ReyesОценок пока нет
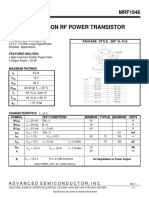
- MRF 1946Документ1 страницаMRF 1946eleazarОценок пока нет
- DA1ECE3013Документ11 страницDA1ECE3013Anonymous HA6894aОценок пока нет
- A Level Physics Notes On Op AmpДокумент3 страницыA Level Physics Notes On Op Ampshimoni rathore100% (1)
- LIC Manual MДокумент76 страницLIC Manual MjananirajuОценок пока нет
- Analysis and Design of Analog Integrated Circuits Frequency Response of AmplifiersДокумент22 страницыAnalysis and Design of Analog Integrated Circuits Frequency Response of AmplifiersAndrea FasatoОценок пока нет
- Applications Examples: Transistor AnalysisДокумент5 страницApplications Examples: Transistor Analysisمحمد الساعديОценок пока нет
- Bipolar Junction TransistorsДокумент25 страницBipolar Junction TransistorsLucille YuОценок пока нет
- CHAPTER 2 DR Wan ZulДокумент19 страницCHAPTER 2 DR Wan Zulnurul najwaОценок пока нет
- Ec3353 QBДокумент11 страницEc3353 QBrajasncetsbcОценок пока нет
- Darlington transistor circuit diagram and operationДокумент3 страницыDarlington transistor circuit diagram and operationSky YeoОценок пока нет
- Datasheet HFE4069 UBPДокумент7 страницDatasheet HFE4069 UBPMarcos SouzaОценок пока нет