Вам также может понравиться
- ELX303 Exam SolutionsДокумент27 страницELX303 Exam SolutionsNadeesha BandaraОценок пока нет
- Experiment 8 Synchronous Generator Line SynchronizationДокумент10 страницExperiment 8 Synchronous Generator Line SynchronizationMd Rodi Bidin100% (1)
- Analog Circuits Lab Possible Viva QuestionsДокумент18 страницAnalog Circuits Lab Possible Viva Questionsarsp_0610198571% (14)
- ST 352-79-1979 Chevrolet Light Truck Wiring CK 10 30 OnlyДокумент12 страницST 352-79-1979 Chevrolet Light Truck Wiring CK 10 30 OnlyHunter FОценок пока нет
- Causes and Effects of Single-Phasing Induction MotorsДокумент8 страницCauses and Effects of Single-Phasing Induction MotorsvenugopalОценок пока нет
- Determination of Voltage DropДокумент5 страницDetermination of Voltage DropaimizaОценок пока нет
- DC GeneratorДокумент6 страницDC GeneratorUditya K100% (1)
- Directional OverДокумент28 страницDirectional OverEdinson Milton Gaona BarbozaОценок пока нет
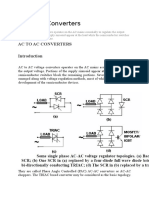
- AC To AC Converters Unit 5Документ37 страницAC To AC Converters Unit 5manoj kumar0% (1)
- Negative-Sequence Relay Protection For Blown High-Side Transformer Fuse DetectionДокумент7 страницNegative-Sequence Relay Protection For Blown High-Side Transformer Fuse DetectionluhusapaОценок пока нет
- Directional Over CurrentДокумент14 страницDirectional Over CurrentAisah El ArinalОценок пока нет
- Question Bank Samples For Power System II EE602Документ4 страницыQuestion Bank Samples For Power System II EE602AvijitОценок пока нет
- Starting Methods of A DC MotorДокумент8 страницStarting Methods of A DC Motoragreykato100% (1)
- Lecture - Distribution Protection Overview (P. 1)Документ60 страницLecture - Distribution Protection Overview (P. 1)Zellagui EnergyОценок пока нет
- Excitation of Isolated Three-Phase Induction Generator by A Single CapacitorДокумент7 страницExcitation of Isolated Three-Phase Induction Generator by A Single CapacitorEngrImranKhanОценок пока нет
- Motor ProtectionДокумент29 страницMotor ProtectionSridhar N Nagarjan100% (4)
- Short Circuit NotesДокумент45 страницShort Circuit NotesReynanteОценок пока нет
- A Single Phase To Three Phase Power Converter For Motor Drive ApДокумент8 страницA Single Phase To Three Phase Power Converter For Motor Drive Apmd naufallОценок пока нет
- Power System Analysis: Three Phase, Power System Operation Tom Overbye and Ross BaldickДокумент22 страницыPower System Analysis: Three Phase, Power System Operation Tom Overbye and Ross BaldickAlexander MartinОценок пока нет
- 6 +ok+MEASURE+MENT+OF+SEQUENCE+REACTANCES+OF+SALIENT+POLE+SYNCHRONOUS+MACHINEДокумент3 страницы6 +ok+MEASURE+MENT+OF+SEQUENCE+REACTANCES+OF+SALIENT+POLE+SYNCHRONOUS+MACHINEaissmsОценок пока нет
- Experiment 7 Synchronous Motor V-CurvesДокумент12 страницExperiment 7 Synchronous Motor V-Curvesshukla_shrishОценок пока нет
- A1Документ4 страницыA1hsvskumarОценок пока нет
- Generator Characteristics: (A) No-Load Saturation Characteristic (E)Документ25 страницGenerator Characteristics: (A) No-Load Saturation Characteristic (E)Kazi Newaj FaisalОценок пока нет
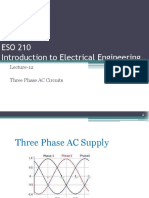
- ESO 210 Introduction To Electrical Engineering: Lecture-12 Three Phase AC CircuitsДокумент45 страницESO 210 Introduction To Electrical Engineering: Lecture-12 Three Phase AC CircuitsAmit MondalОценок пока нет
- Unit4questions 100415042439 Phpapp01Документ4 страницыUnit4questions 100415042439 Phpapp01Mohamad HishamОценок пока нет
- Phase-Controlled Converters: Unit IiДокумент29 страницPhase-Controlled Converters: Unit IiChinnaGurappaОценок пока нет
- Experiment No: 4Документ12 страницExperiment No: 4Nitesh-02Оценок пока нет
- Regenerative Braking of Induction MotorДокумент27 страницRegenerative Braking of Induction MotorcoolkannaОценок пока нет
- Psa Unit 4Документ21 страницаPsa Unit 4Aish KrishОценок пока нет
- No Load and Load Test On A DC Shunt GeneratorДокумент3 страницыNo Load and Load Test On A DC Shunt GeneratorHazoorAhmadОценок пока нет
- Neutral Point ShiftДокумент24 страницыNeutral Point Shiftscrib_111Оценок пока нет
- AGN 017 - Unbalanced Loads: Application Guidance Notes: Technical Information From Cummins Generator TechnologiesДокумент8 страницAGN 017 - Unbalanced Loads: Application Guidance Notes: Technical Information From Cummins Generator TechnologiesariwibowoОценок пока нет
- ECE4762011 - Lect9 Transformer PuДокумент43 страницыECE4762011 - Lect9 Transformer PuSudhir SainiОценок пока нет
- AGN 017 - Unbalanced Loads: Application Guidance Notes: Technical Information From Cummins Generator TechnologiesДокумент9 страницAGN 017 - Unbalanced Loads: Application Guidance Notes: Technical Information From Cummins Generator TechnologiesJhay Phee LlorenteОценок пока нет
- Generator Characteristics: 1. No-Load Saturation Characteristic (E /I)Документ24 страницыGenerator Characteristics: 1. No-Load Saturation Characteristic (E /I)Uma SaluvaОценок пока нет
- PAPER 2003 03 en HV Shunt Reactor Secrets For Protection EngineersДокумент30 страницPAPER 2003 03 en HV Shunt Reactor Secrets For Protection Engineerslamugre20003506Оценок пока нет
- ABB HV Shunt ReactorДокумент30 страницABB HV Shunt Reactortkdrt2166100% (1)
- Q02201300137Документ8 страницQ02201300137Vikas PatelОценок пока нет
- Exp2 Magnetic AmplifierДокумент20 страницExp2 Magnetic AmplifierNikhil Aggarwal50% (2)
- Manual Ee IVДокумент56 страницManual Ee IVAkhilesh Kumar MishraОценок пока нет
- Unsymmetrical FaultsДокумент16 страницUnsymmetrical Faultslerato_lechelaОценок пока нет
- Synchronous Generator: Conducted By: MR. G.V.D. KUMARAДокумент5 страницSynchronous Generator: Conducted By: MR. G.V.D. KUMARANuwan BandaraОценок пока нет
- Characterization of Voltage Sags in Industrial Distribution SystemsДокумент8 страницCharacterization of Voltage Sags in Industrial Distribution SystemsHamzah RezaОценок пока нет
- Voltage and Current TransformersДокумент27 страницVoltage and Current TransformersRebekah Powell100% (1)
- Power Systems Lab ManualДокумент34 страницыPower Systems Lab ManualPrashant Ramesh BurhadeОценок пока нет
- Em Lab-II ManualДокумент45 страницEm Lab-II Manualrkadiraj701150% (4)
- Chapter - I: Per Unit (PU) Representation of Power System Elements (Contd)Документ9 страницChapter - I: Per Unit (PU) Representation of Power System Elements (Contd)Asrar Hussain BhatОценок пока нет
- 7.3 Three Phase Short CircuitДокумент12 страниц7.3 Three Phase Short Circuitbasit ubasitОценок пока нет
- Symmetrical ComponentsДокумент36 страницSymmetrical ComponentsFaten Nabilla NordinОценок пока нет
- Lecture 3Документ17 страницLecture 3Singam SridharОценок пока нет
- Answers of Power Electronics NewДокумент9 страницAnswers of Power Electronics NewSyed ZabiullahОценок пока нет
- Ee6501 Psa Eee VST Au Units IVДокумент24 страницыEe6501 Psa Eee VST Au Units IVManeesh K ChaudharyОценок пока нет
- Generator and Transmission Line StabilityДокумент27 страницGenerator and Transmission Line StabilityDan GrayОценок пока нет
- Power System Analysis: Transformers, Per UnitДокумент43 страницыPower System Analysis: Transformers, Per UnitMamta MrjnОценок пока нет
- Syncronous Machine ReactanceДокумент7 страницSyncronous Machine ReactanceSuvra PattanayakОценок пока нет
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesОт EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesОценок пока нет
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1От EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Рейтинг: 2.5 из 5 звезд2.5/5 (3)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2От EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Оценок пока нет
- 2011 Blaise J. Fitzpatrick, P.E. Page 1 of 25Документ25 страниц2011 Blaise J. Fitzpatrick, P.E. Page 1 of 25dexterОценок пока нет
- Mechanically Stabilized Earth Structures - Part 3 by Blaise J. Fitzpatrick, P.E. Fitzpatrick Engineering Associates, P.CДокумент24 страницыMechanically Stabilized Earth Structures - Part 3 by Blaise J. Fitzpatrick, P.E. Fitzpatrick Engineering Associates, P.CdexterОценок пока нет
- Reserve Bank of India Bulletin: Weekly Statistical SupplementДокумент8 страницReserve Bank of India Bulletin: Weekly Statistical SupplementdexterОценок пока нет
- Memories in Computers Part 2: DDR Sdrams: Dr. William R. Huber, P.EДокумент43 страницыMemories in Computers Part 2: DDR Sdrams: Dr. William R. Huber, P.EdexterОценок пока нет
- Corrosion Control and Tactics: by Gerald O. Davis, P.E. Davis Materials & Mechanical Engineering, IncДокумент40 страницCorrosion Control and Tactics: by Gerald O. Davis, P.E. Davis Materials & Mechanical Engineering, IncdexterОценок пока нет
- I. History: Ideas." Ancient Civilizations Used Native Material Such As Straw, Tree Branches, and PlantДокумент28 страницI. History: Ideas." Ancient Civilizations Used Native Material Such As Straw, Tree Branches, and PlantdexterОценок пока нет
- Memories in Computers Part 3: Flash Memories: Dr. William R. Huber, P.EДокумент50 страницMemories in Computers Part 3: Flash Memories: Dr. William R. Huber, P.EdexterОценок пока нет
- Aeration Commisioning - STPДокумент7 страницAeration Commisioning - STPdexterОценок пока нет
- Memories in Computers-Part 1: Dr. William R. Huber, P.EДокумент55 страницMemories in Computers-Part 1: Dr. William R. Huber, P.EdexterОценок пока нет
- Advices in Choosing The Right Neutral Earthing System For Your Installation EEP PDFДокумент1 страницаAdvices in Choosing The Right Neutral Earthing System For Your Installation EEP PDFdexterОценок пока нет
- USB Type-C™ Mini Dock EVM: User's GuideДокумент26 страницUSB Type-C™ Mini Dock EVM: User's GuidedexterОценок пока нет
- Automotive Bearing Technology: A Suncam Online Continuing Education CourseДокумент28 страницAutomotive Bearing Technology: A Suncam Online Continuing Education CoursedexterОценок пока нет
- User Manual 1868584 PDFДокумент5 страницUser Manual 1868584 PDFdexterОценок пока нет
- SOP Sewer Collection SystemsДокумент14 страницSOP Sewer Collection SystemsdexterОценок пока нет
- 30 Minute ActivityДокумент1 страница30 Minute ActivitydexterОценок пока нет
- Ways To Improve Customer SatisfactionДокумент4 страницыWays To Improve Customer SatisfactiondexterОценок пока нет
- Clariflocculator TypesДокумент7 страницClariflocculator TypesdexterОценок пока нет
- MN90T102Документ13 страницMN90T102dexterОценок пока нет
- Difference Between DTC and Scalar Mode PDFДокумент6 страницDifference Between DTC and Scalar Mode PDFVitali LursmanashviliОценок пока нет
- Cableado y Diagrama de Flujo M9-M11Документ7 страницCableado y Diagrama de Flujo M9-M11HaroldOcampoОценок пока нет
- Nuclear Maintenance Application Center Guide For The Perforomance of Oniste and Vendor Shop SinpectionДокумент88 страницNuclear Maintenance Application Center Guide For The Perforomance of Oniste and Vendor Shop Sinpectionabi kuswoОценок пока нет
- Click Here To Join To Download Our App Follow Us On Facebook Follow Us On InstagramДокумент12 страницClick Here To Join To Download Our App Follow Us On Facebook Follow Us On InstagramshilОценок пока нет
- Pushbutton Units and Indicator Lights: SIGNUM Plastic 3SB3, Round Program, 22 MMДокумент1 страницаPushbutton Units and Indicator Lights: SIGNUM Plastic 3SB3, Round Program, 22 MMjquatriniОценок пока нет
- 03 - Operating Manual Filter Control UnitДокумент14 страниц03 - Operating Manual Filter Control UnitGennius FloresОценок пока нет
- Stick Diagrams: Chapter 1 IntroductionДокумент1 страницаStick Diagrams: Chapter 1 IntroductionCarlos SaavedraОценок пока нет
- Avionic General Test EquipmentДокумент15 страницAvionic General Test EquipmentYe Min OoОценок пока нет
- Arduino (Thermistor) Temperature Sensor Tutorial C/W CodeДокумент11 страницArduino (Thermistor) Temperature Sensor Tutorial C/W CodeBenoit MbayoОценок пока нет
- Chelton: Blade Antenna TYPE 16-434Документ13 страницChelton: Blade Antenna TYPE 16-434dadanОценок пока нет
- Terminal Box - 20230308 - 075423Документ3 страницыTerminal Box - 20230308 - 075423Mohammad AlmafarjehОценок пока нет
- Solar Operations and Maintenance: 550 KW CF Aguilar Rice MillДокумент27 страницSolar Operations and Maintenance: 550 KW CF Aguilar Rice MillAngelo Mark Ordoña PorgatorioОценок пока нет
- Digital Signal Processing: EC303: September 22 2020Документ35 страницDigital Signal Processing: EC303: September 22 2020V Prakash SinghОценок пока нет
- Speed Control of DC Motor Using Fuzzy Logic ControllerДокумент8 страницSpeed Control of DC Motor Using Fuzzy Logic ControllerSiva RajОценок пока нет
- P142 - H M - J - DATASHEET - WW - en GB PDFДокумент3 страницыP142 - H M - J - DATASHEET - WW - en GB PDFFebrianto HermawanОценок пока нет
- Induction Motor: by Ashvani Shukla Manager (C&I) BGR EnergyДокумент15 страницInduction Motor: by Ashvani Shukla Manager (C&I) BGR Energywondi BETОценок пока нет
- ICT-CSS12 Q2 Mod1 InstallingAndConfiguringComputerSystemsДокумент43 страницыICT-CSS12 Q2 Mod1 InstallingAndConfiguringComputerSystemsMedrano RuelaОценок пока нет
- OMAP3530 Red CardДокумент265 страницOMAP3530 Red CardS Rizwan HaiderОценок пока нет
- M6 Series Diagnostic Ultrasound System Service ManualДокумент266 страницM6 Series Diagnostic Ultrasound System Service ManualBruno AraújoОценок пока нет
- An5457 RF Matching Network Design Guide For Stm32wl Series StmicroelectronicsДокумент75 страницAn5457 RF Matching Network Design Guide For Stm32wl Series StmicroelectronicsTúlio PiresОценок пока нет
- MP Avt 306 18Документ10 страницMP Avt 306 18nileshsmateОценок пока нет
- National Semiconductor: PreliminaryДокумент20 страницNational Semiconductor: PreliminarySergio Diaz PereiraОценок пока нет
- Input Unit With Selfverify - Bn-300: Interactive Fire Detection Systems Product DatasheetДокумент2 страницыInput Unit With Selfverify - Bn-300: Interactive Fire Detection Systems Product DatasheetPawelОценок пока нет
- Component Maintenance Manual With Illustrated Parts List: This Document Replaces and Cancels 24-31-40Документ96 страницComponent Maintenance Manual With Illustrated Parts List: This Document Replaces and Cancels 24-31-40ALEXANDER ROBLESОценок пока нет
- Neoprobe 2000Документ44 страницыNeoprobe 2000Leo BenezОценок пока нет
- RCI-1502 LM Strut Boom System Instruction Manual: MAN-1072 Rev DДокумент72 страницыRCI-1502 LM Strut Boom System Instruction Manual: MAN-1072 Rev DM RefaiОценок пока нет
- Study Program: (International Students)Документ2 страницыStudy Program: (International Students)Rizwan HameedОценок пока нет
- Manual de Instruções Camry EB9062 (2 Páginas)Документ1 страницаManual de Instruções Camry EB9062 (2 Páginas)ric bgkОценок пока нет