Вам также может понравиться
- Etude Et Conception D'un Reducteur de Vitesse Coxial À Deux ÉtagesДокумент125 страницEtude Et Conception D'un Reducteur de Vitesse Coxial À Deux ÉtagesKhemili Sayf100% (1)
- Nassim Haramein - La Fleur Des ChampsДокумент64 страницыNassim Haramein - La Fleur Des ChampsFélicien LOGMO ASSOUMOUОценок пока нет
- Alternateur TriphaseДокумент29 страницAlternateur TriphaseDerrouch Abderrahmane0% (1)
- TD Electron I Quel 2Документ135 страницTD Electron I Quel 2HaitamElbathaoui100% (3)
- TD Electron I Quel 2Документ135 страницTD Electron I Quel 2HaitamElbathaoui100% (3)
- Rapport de StageДокумент32 страницыRapport de StageMarwane Ch100% (1)
- Exercices AlternateurДокумент15 страницExercices Alternateurarnaud29100% (1)
- TD n2 - ModulationДокумент4 страницыTD n2 - ModulationFa TineОценок пока нет
- Filature Coton Et LaineДокумент41 страницаFilature Coton Et LaineSara Khaldi88% (8)
- TD HacheursДокумент10 страницTD HacheursRroouuffaa Abbes100% (1)
- P.Michal - Services SystemeДокумент44 страницыP.Michal - Services SystemeDerrouch AbderrahmaneОценок пока нет
- Mna TP1Документ2 страницыMna TP1Derrouch AbderrahmaneОценок пока нет
- EMD 2011 1 BF OkДокумент6 страницEMD 2011 1 BF OkDerrouch AbderrahmaneОценок пока нет
- MOOC UVED ENR Retranscriptions Solaire ElectriciteДокумент17 страницMOOC UVED ENR Retranscriptions Solaire ElectriciteDerrouch AbderrahmaneОценок пока нет
- Méthode Des 2 WattmètresДокумент4 страницыMéthode Des 2 WattmètresKamal Hassani AlaouiОценок пока нет
- AlternateДокумент8 страницAlternateDerrouch AbderrahmaneОценок пока нет
- 03 Cours Electronique de Puissance III Le Redressement Commande 1Документ13 страниц03 Cours Electronique de Puissance III Le Redressement Commande 1Yann ElhamОценок пока нет
- Les Cellules Solaires de La Troisième GénérationДокумент2 страницыLes Cellules Solaires de La Troisième GénérationDerrouch Abderrahmane50% (2)
- Chapitre 1Документ6 страницChapitre 1Derrouch AbderrahmaneОценок пока нет
- 4 Power System Blockset 3 PDFДокумент14 страниц4 Power System Blockset 3 PDFAnis BNОценок пока нет
- Lecture 3-Modélisation HarmoniqueДокумент18 страницLecture 3-Modélisation HarmoniqueDerrouch AbderrahmaneОценок пока нет
- Tfe Oh PDFДокумент142 страницыTfe Oh PDFmilanovsdОценок пока нет
- Lecture 2-Harmoniques Et NormesДокумент39 страницLecture 2-Harmoniques Et NormesDerrouch AbderrahmaneОценок пока нет
- TDD AsservissementsLineairesContinusdocx PDFДокумент13 страницTDD AsservissementsLineairesContinusdocx PDFDerrouch AbderrahmaneОценок пока нет
- TD NyquistДокумент15 страницTD NyquistramiyaminОценок пока нет
- TP2-Engagement Des CentralesДокумент2 страницыTP2-Engagement Des CentralesDerrouch AbderrahmaneОценок пока нет
- TD1 (Ex & Sol)Документ18 страницTD1 (Ex & Sol)Younes Raache75% (4)
- Modélisation Dynamique de La Machine À Courant Continu: Hypothèses de TravailДокумент6 страницModélisation Dynamique de La Machine À Courant Continu: Hypothèses de TravailDerrouch AbderrahmaneОценок пока нет
- Emd Corr AsrviДокумент4 страницыEmd Corr AsrviDerrouch AbderrahmaneОценок пока нет
- Principes Generaux de La Correction PDFДокумент12 страницPrincipes Generaux de La Correction PDFDerrouch AbderrahmaneОценок пока нет
- TitreIII) EDPIДокумент3 страницыTitreIII) EDPIDerrouch AbderrahmaneОценок пока нет
- All Exam IUT PDFДокумент21 страницаAll Exam IUT PDFDerrouch AbderrahmaneОценок пока нет
- FR Technical Guide No 1 REVC PDFДокумент36 страницFR Technical Guide No 1 REVC PDFDerrouch AbderrahmaneОценок пока нет
- CHAP4 2001 ConcordiaParkДокумент7 страницCHAP4 2001 ConcordiaParkDerrouch AbderrahmaneОценок пока нет
- Hyp de CalculДокумент12 страницHyp de CalculIheb IsmailОценок пока нет
- 3e ch04 p41 Exercices Supp EleveДокумент4 страницы3e ch04 p41 Exercices Supp EleveYoman Arthur verdier AssuiОценок пока нет
- Boil Off Skikda2018Документ10 страницBoil Off Skikda2018Zouhair AIT-OMARОценок пока нет
- Besoin en EauДокумент94 страницыBesoin en Eauben haydar100% (1)
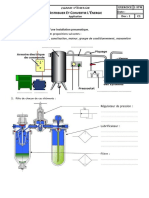
- Chaine D Information Distribuer-ConvertirДокумент7 страницChaine D Information Distribuer-ConvertirKASRAOUI WALIDОценок пока нет
- TP N°9: Etude Du Mouvement de Rotation D'Un Solide Autour D'Un Axe FixeДокумент3 страницыTP N°9: Etude Du Mouvement de Rotation D'Un Solide Autour D'Un Axe FixeOUSSAMA BOUTRIAОценок пока нет
- Cours 14Документ10 страницCours 14lamia temmoucheОценок пока нет
- Exercices Convertir Et Distribuer 2022 ALFARABI Nndoc-1Документ17 страницExercices Convertir Et Distribuer 2022 ALFARABI Nndoc-1FatimaZahra QOBBIОценок пока нет
- RApport TPДокумент25 страницRApport TPOumar MandodjoОценок пока нет
- A Laboratory Study of The Strength of ClaysДокумент24 страницыA Laboratory Study of The Strength of ClayslorenaОценок пока нет
- Variogramme GeostatistiqueДокумент22 страницыVariogramme GeostatistiquedimaОценок пока нет
- Cours TB2Документ40 страницCours TB2رؤوف بوسعيدОценок пока нет
- MergedДокумент12 страницMergedPetroPower OilandgasОценок пока нет
- Programme Formation SOLIDWORKS PerfectionnementДокумент5 страницProgramme Formation SOLIDWORKS PerfectionnementCad QuestОценок пока нет
- 1-Conception Et Analyse Des Syst MécДокумент6 страниц1-Conception Et Analyse Des Syst Méchamza100% (1)
- Champ ÉléctrostatiqueДокумент4 страницыChamp ÉléctrostatiqueRivaldo Nvo Nguema AvomoОценок пока нет
- TD-1 Liaisons ActionsДокумент3 страницыTD-1 Liaisons Actionslailai hai0% (1)
- Dossier Ecrit Pm16gr3 Savu VladimirДокумент4 страницыDossier Ecrit Pm16gr3 Savu VladimirVladimir SavuОценок пока нет
- Chapitre IV-Le Second Principe de La Thermodynamique PDFДокумент13 страницChapitre IV-Le Second Principe de La Thermodynamique PDFInes MazgarОценок пока нет
- NF en 12810-1Документ28 страницNF en 12810-1BENJAMIN PAULОценок пока нет
- Fiche - Commerciale - 01 ECSPER FC009 RevA1 Sextant - IA - 15 03 2022Документ1 страницаFiche - Commerciale - 01 ECSPER FC009 RevA1 Sextant - IA - 15 03 2022Fieltoa LAREОценок пока нет
- Détection Des Défauts D'une Machine Tournantes Par L'analyse FFTДокумент82 страницыDétection Des Défauts D'une Machine Tournantes Par L'analyse FFTSofiane HAMCHAOUIОценок пока нет
- Minera Hta-Bt 100 À 250 KvaДокумент2 страницыMinera Hta-Bt 100 À 250 KvaAli SoltaniОценок пока нет
- TDs 2013 EnonceДокумент24 страницыTDs 2013 EnonceMohamed El HajjamОценок пока нет