Вам также может понравиться
- Preparation Concours 2020 Cinetique - TDДокумент11 страницPreparation Concours 2020 Cinetique - TDNowe AhmadeОценок пока нет
- 14 TD Corrigé - Torseur Cinétique Et Torseur DynamiqueДокумент7 страниц14 TD Corrigé - Torseur Cinétique Et Torseur DynamiqueOut Of (Order)Оценок пока нет
- CNC 2011 CorrigéДокумент23 страницыCNC 2011 CorrigéImad NAKHI100% (1)
- TDДокумент6 страницTDYassir Ez-znafryОценок пока нет
- DL 1 Spe MP Rs Oct.22Документ8 страницDL 1 Spe MP Rs Oct.22Ibrahim OmraniОценок пока нет
- TD3-2 - CorrectionДокумент8 страницTD3-2 - CorrectionReda BaddyОценок пока нет
- DL 1 Spe MP RS Oct.22 CorrigéДокумент6 страницDL 1 Spe MP RS Oct.22 CorrigéHouda HoudaОценок пока нет
- 37 ds1 MP CinetiqueДокумент5 страниц37 ds1 MP Cinetiquesoufyane el ouahabiОценок пока нет
- CI06 TD15 Corrigé - Déterminer La Loi de Commande en Effort D - Un Mécanisme À L - ÉquilibreДокумент12 страницCI06 TD15 Corrigé - Déterminer La Loi de Commande en Effort D - Un Mécanisme À L - ÉquilibreKhaled Jberi100% (1)
- DL2 EnonДокумент3 страницыDL2 EnonLucas huzvdcbОценок пока нет
- TD-Dynamique MP Déc. 22Документ5 страницTD-Dynamique MP Déc. 22ayoub CHОценок пока нет
- 12 TD Sujet - Géométrie Des MassesДокумент4 страницы12 TD Sujet - Géométrie Des MassesSophaVisa KhunОценок пока нет
- TD 08 - Calcul VectorielДокумент4 страницыTD 08 - Calcul Vectorielbhs channelОценок пока нет
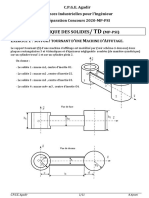
- Mécanisme D'ouverture Automatique D'une Trappe de DésenfumageДокумент2 страницыMécanisme D'ouverture Automatique D'une Trappe de DésenfumageSoulaiman Andahmou0% (1)
- TD Dynamique Du Point MatérielДокумент4 страницыTD Dynamique Du Point Matérielyahya El MfОценок пока нет
- TD28 CorrectionДокумент8 страницTD28 CorrectionWasfi ZakariaОценок пока нет
- 93 ds2 Psi Dynamique 18 19Документ4 страницы93 ds2 Psi Dynamique 18 19kajti100% (1)
- TD 24 Corrigé - Modélisation Des AM de Contact Surfacique - Lois de CoulombДокумент8 страницTD 24 Corrigé - Modélisation Des AM de Contact Surfacique - Lois de CoulombMohamed AbaakilОценок пока нет
- TD Statique CinématiqueДокумент5 страницTD Statique CinématiqueAhmed fattoumОценок пока нет
- Torseur Cinematique CorrigeДокумент2 страницыTorseur Cinematique CorrigeAmal Fatouh100% (1)
- TD E7 Filtrage PDFДокумент17 страницTD E7 Filtrage PDFJoseph OngueneОценок пока нет
- Examen Jan 2017-CorrigéДокумент3 страницыExamen Jan 2017-Corrigéyasahiro 10Оценок пока нет
- TD N°05 Statique CorrectionДокумент9 страницTD N°05 Statique CorrectionennajiОценок пока нет
- Correction TD2 IMT2!21!22Документ14 страницCorrection TD2 IMT2!21!22WISSAL JANAОценок пока нет
- TP 4Документ8 страницTP 4Mohamud Lhaf100% (1)
- TD Série1 TorseursДокумент2 страницыTD Série1 TorseursEl Matador100% (1)
- 14 TD Sujet - Torseur Cinétique Et Torseur Dynamique PDFДокумент5 страниц14 TD Sujet - Torseur Cinétique Et Torseur Dynamique PDFHassanbfk BfkОценок пока нет
- TD2 CДокумент1 страницаTD2 Cpaul morphyОценок пока нет
- GM DS9-2013 CorrigéДокумент4 страницыGM DS9-2013 CorrigéGray AbОценок пока нет
- CNC MP Physique2 1996c1Документ9 страницCNC MP Physique2 1996c1Lahcen ElamraouiОценок пока нет
- Transfosignaux PDFДокумент4 страницыTransfosignaux PDFAnis Souissi100% (2)
- 08-2 Dynamique Du Solide - TDДокумент24 страницы08-2 Dynamique Du Solide - TDAdonaï SolangaОценок пока нет
- A Savoir InertieДокумент3 страницыA Savoir InertieemyazОценок пока нет
- CNC Si MP 2021 CGДокумент8 страницCNC Si MP 2021 CGayaelhadef123Оценок пока нет
- Correction TD7 EquationsLocalesElectromagДокумент15 страницCorrection TD7 EquationsLocalesElectromagdhouhaОценок пока нет
- TD 07 Corrigé - Identification Temporelle Des SLCIДокумент5 страницTD 07 Corrigé - Identification Temporelle Des SLCIHana Khemissi100% (2)
- Centre D Usinage 5 Axes CorrigeДокумент2 страницыCentre D Usinage 5 Axes CorrigeLAILA IDRISSIОценок пока нет
- Colle - 1 - CorrectionДокумент4 страницыColle - 1 - CorrectionAbdelali YacoubiОценок пока нет
- TD Cinematique CHARIOT FILOGUIDE PDFДокумент4 страницыTD Cinematique CHARIOT FILOGUIDE PDFanassОценок пока нет
- 5 DiplelectrostratiqueДокумент9 страниц5 DiplelectrostratiquekoyabeОценок пока нет
- Fiche Chaines de SolidesДокумент7 страницFiche Chaines de Solidesayoub elОценок пока нет
- Theorie Des Mecanismes Hyperstatisme, Mobilite, Liaison EquivalenteДокумент8 страницTheorie Des Mecanismes Hyperstatisme, Mobilite, Liaison EquivalenteothmaneОценок пока нет
- Exo 01 03Документ5 страницExo 01 03Hamza RimiОценок пока нет
- 2019-Mp-Feuille de TD de DynamiqueДокумент9 страниц2019-Mp-Feuille de TD de DynamiqueAyman BenamerОценок пока нет
- Rattrapage ST-sem3 - 2008-2009Документ5 страницRattrapage ST-sem3 - 2008-2009Rou MàissàОценок пока нет
- Mac Application Torseur 2Документ1 страницаMac Application Torseur 2Bilel LaamiriОценок пока нет
- Système 3Документ9 страницSystème 3akarne YounessОценок пока нет
- Si MP 2022Документ16 страницSi MP 2022NguyenОценок пока нет
- CNC Info 2018 MPДокумент12 страницCNC Info 2018 MPSalouma BoutanfitОценок пока нет
- Calcul de Cosinus Par RadicauxДокумент2 страницыCalcul de Cosinus Par RadicauxKarime AmineОценок пока нет
- TD Liaisons - Schema Cinematique Corrige - 2Документ6 страницTD Liaisons - Schema Cinematique Corrige - 2Ali OuahmadОценок пока нет
- E97p308 PDFДокумент6 страницE97p308 PDFEL Omrani SaidОценок пока нет
- CINEMATIQUE GRAPHIQUE Preparation 214 PDFДокумент10 страницCINEMATIQUE GRAPHIQUE Preparation 214 PDFYoussef RachidОценок пока нет
- Corr SUP TD CIN PSДокумент2 страницыCorr SUP TD CIN PSSafae SabirОценок пока нет
- TPs Automatique 1Документ6 страницTPs Automatique 1HolaОценок пока нет
- Corrigé TD 22 - Comportement Statique Des SystèmesДокумент2 страницыCorrigé TD 22 - Comportement Statique Des Systèmesbhs channel100% (1)
- TD1-Cinétique Des Solides 23-24Документ6 страницTD1-Cinétique Des Solides 23-24Imad NouniОценок пока нет
- Exo-Sup S1 2018Документ3 страницыExo-Sup S1 2018altti bouayeОценок пока нет
- Préparation Concours 2020 - Dynamique - PFD-TEC - Applications (LAAS9)Документ12 страницPréparation Concours 2020 - Dynamique - PFD-TEC - Applications (LAAS9)AdamОценок пока нет
- Agressivité TraficДокумент21 страницаAgressivité TraficNowe AhmadeОценок пока нет
- Comportement Béton SEM23Документ7 страницComportement Béton SEM23Nowe AhmadeОценок пока нет
- TD AgressivitéДокумент2 страницыTD AgressivitéNowe AhmadeОценок пока нет
- FL 170 Dformation Des Poutres Axe Courbe Gunt 342 PDF - 1 - FR FRДокумент3 страницыFL 170 Dformation Des Poutres Axe Courbe Gunt 342 PDF - 1 - FR FRNowe AhmadeОценок пока нет
- TD Serie3Документ4 страницыTD Serie3Nowe AhmadeОценок пока нет
- Poly MDM 3emeДокумент34 страницыPoly MDM 3emeNowe AhmadeОценок пока нет
- TD Serie1Документ1 страницаTD Serie1Nowe AhmadeОценок пока нет
- Exposé Cours Assemblages Boulonnés 2020 2021Документ39 страницExposé Cours Assemblages Boulonnés 2020 2021Nowe AhmadeОценок пока нет
- Exercices Sur Carte GéologiqueДокумент7 страницExercices Sur Carte GéologiqueNowe Ahmade50% (2)
- AscensionnelДокумент11 страницAscensionnelNowe AhmadeОценок пока нет
- Corrigés Des ExercicesДокумент3 страницыCorrigés Des ExercicesNowe Ahmade100% (2)
- 1) Assemblages Frettes HДокумент9 страниц1) Assemblages Frettes HNowe AhmadeОценок пока нет
- Corrigé TDTP1Документ8 страницCorrigé TDTP1Nowe AhmadeОценок пока нет
- Dl2 1 Magnetostatique - CCP MP 2004 CorrigeДокумент4 страницыDl2 1 Magnetostatique - CCP MP 2004 CorrigeAbdessamad LougriniОценок пока нет
- Tableau de Choix de Section Des Cables CuivreДокумент5 страницTableau de Choix de Section Des Cables CuivreMaxence KouessiОценок пока нет
- Fascicule TD1 CVS PART 1Документ10 страницFascicule TD1 CVS PART 1Hamed AyadiОценок пока нет
- Devoir #1Документ4 страницыDevoir #1Benbrahimo RcayoussoufiОценок пока нет
- Cours ElectrДокумент40 страницCours ElectrAymane Elfinou IIОценок пока нет
- Serie 0 5Документ2 страницыSerie 0 5Omar LANGEURОценок пока нет
- DL 001051 04 01.01.00Документ17 страницDL 001051 04 01.01.00dsiscn100% (1)
- Grandeurs Physiques Liees A La Quantite de Matiere Resume de Cours 2Документ2 страницыGrandeurs Physiques Liees A La Quantite de Matiere Resume de Cours 2Aissam1 RenaultОценок пока нет
- Chapitre 5 Mesure Des ResistancesДокумент9 страницChapitre 5 Mesure Des ResistancesbahiaОценок пока нет
- TP DiodeДокумент9 страницTP DiodefarissnourОценок пока нет
- Moteur À Courant Contenue Courbe-ConvertiДокумент4 страницыMoteur À Courant Contenue Courbe-ConvertiLabossef LabossefchedlyОценок пока нет
- EF - CC+Corrigés Phys2 ST 2019-2020Документ7 страницEF - CC+Corrigés Phys2 ST 2019-2020Fawzi BendahmaneОценок пока нет
- OutputДокумент27 страницOutputregismak1234Оценок пока нет
- Tableau de Conversion Des UnitésДокумент1 страницаTableau de Conversion Des UnitésAnou Ar80% (5)
- Diapo Cours - MF - Froid Industriel - ENSAM - 2020-21 - Partie-1 - Généralités - V4 - SuiteДокумент25 страницDiapo Cours - MF - Froid Industriel - ENSAM - 2020-21 - Partie-1 - Généralités - V4 - SuitehfjbbhjbОценок пока нет
- TP - MDFДокумент6 страницTP - MDFLind SyОценок пока нет
- Monte Charge MatДокумент3 страницыMonte Charge MatmarwitosОценок пока нет
- Ts12cours Mouvement Dans Un Champ UniformeДокумент6 страницTs12cours Mouvement Dans Un Champ UniformeNaruto KuramaОценок пока нет
- Oscillations Libres D Un Circuit RLC Serie Serie D Exercices 1Документ4 страницыOscillations Libres D Un Circuit RLC Serie Serie D Exercices 1Khalid MokarramОценок пока нет
- Exercices Sur Le Magnetisme 1 Superposition de Champs - CompressДокумент11 страницExercices Sur Le Magnetisme 1 Superposition de Champs - CompressHanine HmidaОценок пока нет
- THERMACOTE Brochure ThermaCote FR 17-02-18-WebДокумент12 страницTHERMACOTE Brochure ThermaCote FR 17-02-18-Webpkh29Оценок пока нет
- La Mesure D'une Résistance Électrique - AlloprofДокумент1 страницаLa Mesure D'une Résistance Électrique - AlloprofOumaimaОценок пока нет
- Série FiltrationДокумент2 страницыSérie FiltrationNawal AzrouОценок пока нет
- Chapitre - 08 - La Compensation de L'énergie RéactiveДокумент18 страницChapitre - 08 - La Compensation de L'énergie RéactiveGlen Roel100% (3)
- TP I Propriétés Du Sol (Vers2021-2022)Документ11 страницTP I Propriétés Du Sol (Vers2021-2022)Moadh TrifiОценок пока нет
- Conducteur Ohmique 3èmeДокумент3 страницыConducteur Ohmique 3èmeNemir Mimir100% (1)
- Module Des Sciences Appliquées: Étude de Conception de Séchoir À Bois SpécialiséДокумент119 страницModule Des Sciences Appliquées: Étude de Conception de Séchoir À Bois SpécialiséSerge KewouОценок пока нет
- TP Masse Volumique Des GranulatsДокумент5 страницTP Masse Volumique Des GranulatsWanis BouhadjerОценок пока нет
- Cours EMV smp3-1Документ61 страницаCours EMV smp3-1Hachim HamzaОценок пока нет
- Compensation D'energie ReactiveДокумент80 страницCompensation D'energie ReactiveYoussef TabitОценок пока нет