Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Apc-4500ve Seccion 9. Profit Controller. Concepto y ReferenciaДокумент70 страницApc-4500ve Seccion 9. Profit Controller. Concepto y ReferenciaNorberto PeñaОценок пока нет
- Multilim SR 469 Compresores de Reducción PtogramaciónДокумент16 страницMultilim SR 469 Compresores de Reducción PtogramaciónNorberto PeñaОценок пока нет
- Apc-4500ve Seccion 8.1. Profit Controller. Referencia de InstalacionДокумент137 страницApc-4500ve Seccion 8.1. Profit Controller. Referencia de InstalacionNorberto PeñaОценок пока нет
- Apc-4500ve Seccion 9. Profit Controller. Concepto y ReferenciaДокумент70 страницApc-4500ve Seccion 9. Profit Controller. Concepto y ReferenciaNorberto PeñaОценок пока нет
- APC-4500VE SECCION 6.2. Guia de Usuario Profit Suite Visualization User GuideДокумент476 страницAPC-4500VE SECCION 6.2. Guia de Usuario Profit Suite Visualization User GuideNorberto PeñaОценок пока нет
- APC-4500VE SECCION 7. PROFIT CONTROLLER. InstalacionДокумент269 страницAPC-4500VE SECCION 7. PROFIT CONTROLLER. InstalacionNorberto PeñaОценок пока нет
- Sap PM Master DataДокумент49 страницSap PM Master DataseenusrinivasОценок пока нет
- APC-4500VE SECCION 2.1. Sintonia de Lazos de ControlДокумент21 страницаAPC-4500VE SECCION 2.1. Sintonia de Lazos de ControlNorberto PeñaОценок пока нет
- Process ControlДокумент144 страницыProcess Control14071988100% (1)
- Sat CodesДокумент10 страницSat CodesAkinloye AbiolaОценок пока нет
- Sat CodesДокумент10 страницSat CodesAkinloye AbiolaОценок пока нет
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (120)
- Experimental Designs in Sentence Processing Research: A Methodological Review and User's GuideДокумент32 страницыExperimental Designs in Sentence Processing Research: A Methodological Review and User's Guidesara1744Оценок пока нет
- Datenblatt Serie-33X eДокумент9 страницDatenblatt Serie-33X eBoody CОценок пока нет
- 2018 (Vuorien Et Al)Документ20 страниц2018 (Vuorien Et Al)gowthami mОценок пока нет
- ALFA ThermostatДокумент1 страницаALFA ThermostatTamilarasi SambathОценок пока нет
- Community Stakeholder Engagement Within A NonДокумент6 страницCommunity Stakeholder Engagement Within A NonAmar narayanОценок пока нет
- BES15a - Mechanics of Deformable Bodies Lecture Notes #6 Bsme 3AДокумент6 страницBES15a - Mechanics of Deformable Bodies Lecture Notes #6 Bsme 3AbrodyОценок пока нет
- COMTEC LeafletДокумент4 страницыCOMTEC Leafletariksyaiful82Оценок пока нет
- Ucsp Collage MakingДокумент2 страницыUcsp Collage MakingDiona MacasaquitОценок пока нет
- 3 Probability DistributionsДокумент78 страниц3 Probability Distributionsha ssanОценок пока нет
- Lecture 3 - DiasporaДокумент6 страницLecture 3 - DiasporaFinn SalisburyОценок пока нет
- Thesis Technology ManagementДокумент7 страницThesis Technology Managementzidhelvcf100% (2)
- Combinatorics and Graph TheoryДокумент5 страницCombinatorics and Graph Theorydoviva8391Оценок пока нет
- A Different Approach To Estimate Air MoistureДокумент7 страницA Different Approach To Estimate Air MoistureVal MosОценок пока нет
- Declaration of Interdependence Steele 1976 2pgs GOV POLДокумент2 страницыDeclaration of Interdependence Steele 1976 2pgs GOV POLsonof libertyОценок пока нет
- Earthquake Lateral Force Analysis: by by Dr. Jagadish. G. KoriДокумент41 страницаEarthquake Lateral Force Analysis: by by Dr. Jagadish. G. Koripmali2Оценок пока нет
- Rational Equations 200516061645Документ12 страницRational Equations 200516061645Shikha AgrawalОценок пока нет
- Book Contents Publication List: Table 13s. Allowable ADTT, Axle-Load Category 3-Pavementa With Doweled JointsДокумент9 страницBook Contents Publication List: Table 13s. Allowable ADTT, Axle-Load Category 3-Pavementa With Doweled JointsSayuti YusofОценок пока нет
- VMWare EBooks - VMware Workspace ONE - Deploy and Manage (V22.x) Student Lecture Manual1Документ50 страницVMWare EBooks - VMware Workspace ONE - Deploy and Manage (V22.x) Student Lecture Manual1Saeed NasharОценок пока нет
- Module 2. Lesson 2. OverexploitationДокумент11 страницModule 2. Lesson 2. OverexploitationJephthah Faith Adorable-PalicОценок пока нет
- BSBLDR523 Lead and Manage Effective Workplace Relationships Assessment BookletДокумент21 страницаBSBLDR523 Lead and Manage Effective Workplace Relationships Assessment BookletJeremiah Noromor Ronquillo100% (1)
- B. Tech Scheme - 2016 Batch PDFДокумент8 страницB. Tech Scheme - 2016 Batch PDFAlex HalesОценок пока нет
- Assignment II & III 208Документ9 страницAssignment II & III 208ramesh pokhrelОценок пока нет
- Energy From Biomass: Laboratory TrainingДокумент11 страницEnergy From Biomass: Laboratory TrainingPОценок пока нет
- Listening TestДокумент3 страницыListening TestNatalia García GarcíaОценок пока нет
- RepetMat Arkusz Podst 1Документ15 страницRepetMat Arkusz Podst 1Stefan Uberman50% (2)
- 2023 - PPS Prelim02Документ7 страниц2023 - PPS Prelim02Mrdark WarriorОценок пока нет
- Daylight Factor - Wikipedia, The Free EncyclopediaДокумент2 страницыDaylight Factor - Wikipedia, The Free EncyclopediadasaОценок пока нет
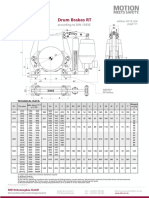
- Drum Brakes RT: According To DIN 15435Документ1 страницаDrum Brakes RT: According To DIN 15435LukaОценок пока нет
- Samples Testbank Research Methods For Business A Skill Building Approach 5th Edition by Uma Sekaran TSW1001Документ3 страницыSamples Testbank Research Methods For Business A Skill Building Approach 5th Edition by Uma Sekaran TSW1001Khawaja Faizan ahmad0% (1)
- Rainbow Water Stacking Influenced by Sugar Density and Principle of Flotation ExperimentДокумент11 страницRainbow Water Stacking Influenced by Sugar Density and Principle of Flotation ExperimentDan Luigi TipactipacОценок пока нет