Вам также может понравиться
- Linear Network Theory: The Commonwealth and International Library: Applied Electricity and Electronics DivisionОт EverandLinear Network Theory: The Commonwealth and International Library: Applied Electricity and Electronics DivisionОценок пока нет
- Chapter 6 Applications of The Laplace TransformДокумент15 страницChapter 6 Applications of The Laplace TransformerodashokОценок пока нет
- C 93Документ24 страницыC 93Karthick NpОценок пока нет
- Solid-State Circuits: Electrical Engineering DivisonОт EverandSolid-State Circuits: Electrical Engineering DivisonРейтинг: 4.5 из 5 звезд4.5/5 (4)
- Network SynthesisДокумент12 страницNetwork SynthesisHarshit GargОценок пока нет
- Electric Network Transfer FunctionsДокумент43 страницыElectric Network Transfer FunctionsJoshua Roberto Gruta100% (1)
- School of Electrical Engineering and Computer Science Department of Electrical EngineeringДокумент34 страницыSchool of Electrical Engineering and Computer Science Department of Electrical EngineeringAbdur RafayОценок пока нет
- Week11 - Transmission Line Parameters - 1Документ31 страницаWeek11 - Transmission Line Parameters - 1Riccardo BurowsОценок пока нет
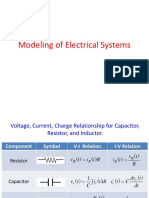
- Modeling of Electrical SystemsДокумент51 страницаModeling of Electrical SystemsCheems PandeyОценок пока нет
- Kurodas Identities IitДокумент7 страницKurodas Identities IitbooksgiveknowledgeОценок пока нет
- Control Theory I Lec. 4: Mathematical Modeling of Electrical & Electronic Systems & Mechanical SystemsДокумент67 страницControl Theory I Lec. 4: Mathematical Modeling of Electrical & Electronic Systems & Mechanical Systemsdream breaker100% (1)
- Electric Circuits ECSE-2010 ECSE 2010: Today and Next ClassesДокумент5 страницElectric Circuits ECSE-2010 ECSE 2010: Today and Next Classeschristian9082Оценок пока нет
- A Novel Passive Circuit Emulator For A Current-ConДокумент8 страницA Novel Passive Circuit Emulator For A Current-Conf20202001Оценок пока нет
- Activity B Class 12th PhysicsДокумент9 страницActivity B Class 12th PhysicsGamizОценок пока нет
- Lec06 PDFДокумент14 страницLec06 PDFNasrullah YusupОценок пока нет
- Short - Circuit Tests of Circuit BreakersДокумент5 страницShort - Circuit Tests of Circuit BreakersclaudelgoОценок пока нет
- Control Systems Engineering: Chapter 2: Modeling in The Frequency DomainДокумент55 страницControl Systems Engineering: Chapter 2: Modeling in The Frequency DomainAphichaya thanchaiОценок пока нет
- Lec 05Документ14 страницLec 05Adit 0110Оценок пока нет
- Assignment TheoryДокумент11 страницAssignment TheoryChomfwix VlogsОценок пока нет
- EE3501, Experiment 2 EE3541, Experiment 4 Single-Phase Transformers and AC ExcitationДокумент9 страницEE3501, Experiment 2 EE3541, Experiment 4 Single-Phase Transformers and AC ExcitationReshan ChowdhuryОценок пока нет
- Anna University Examination Questions: EE6201-Circuit Theory May - 2015Документ7 страницAnna University Examination Questions: EE6201-Circuit Theory May - 2015Anonymous yO7rcec6vuОценок пока нет
- Lab Iv. Silicon Diode Characteristics: 1. ObjectiveДокумент9 страницLab Iv. Silicon Diode Characteristics: 1. ObjectiveRaja MariyappanОценок пока нет
- Alexander CH 02 Final R1Документ16 страницAlexander CH 02 Final R1utpОценок пока нет
- Chapter 2 - Part 2 (Cont)Документ72 страницыChapter 2 - Part 2 (Cont)Sanji KarunaОценок пока нет
- Lab4 F15 Si DiodeДокумент15 страницLab4 F15 Si DiodeJohn MarkОценок пока нет
- Experiment - 1Документ10 страницExperiment - 1GeoffОценок пока нет
- M4W7 8Документ35 страницM4W7 8Tonepher CaballeroОценок пока нет
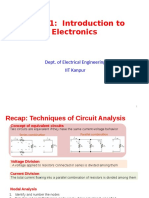
- Esc201: Introduction To Electronics: Dept. of Electrical Engineering Iit KanpurДокумент59 страницEsc201: Introduction To Electronics: Dept. of Electrical Engineering Iit KanpurAbhishek AryaОценок пока нет
- Electrical Network Transfer FunctionДокумент21 страницаElectrical Network Transfer FunctionRyan Arce100% (2)
- Chapter 1 NewДокумент29 страницChapter 1 NewMikias YimerОценок пока нет
- Feedback Control Systems (FCS) : Lecture-6 Mathematical Modelling of Electrical & Electronic SystemsДокумент30 страницFeedback Control Systems (FCS) : Lecture-6 Mathematical Modelling of Electrical & Electronic SystemsSuyash Dahake VlogsОценок пока нет
- Esc201: Introduction To Electronics: Amit Verma Dept. of Electrical Engineering Iit KanpurДокумент31 страницаEsc201: Introduction To Electronics: Amit Verma Dept. of Electrical Engineering Iit KanpurPrakhar chhalotreОценок пока нет
- Act-4 LEDДокумент2 страницыAct-4 LEDmohammed irfanОценок пока нет
- Lect 03 TF - Modeling in Freq DomainДокумент40 страницLect 03 TF - Modeling in Freq Domainمجهول راكОценок пока нет
- Analysis and Simulation of Electric Circuits (EME 208) : Spring 2011Документ28 страницAnalysis and Simulation of Electric Circuits (EME 208) : Spring 2011Ahmed MohyОценок пока нет
- Sss 2503010Документ8 страницSss 2503010JEAN GEMОценок пока нет
- ELL 100 Introduction To Electrical Engineering: L 6: N A CДокумент53 страницыELL 100 Introduction To Electrical Engineering: L 6: N A CAnjali joshiОценок пока нет
- Modelling The Dynamics of Log-Domain Circuits (A.Ascoli At-El 2007)Документ38 страницModelling The Dynamics of Log-Domain Circuits (A.Ascoli At-El 2007)yanivscribdОценок пока нет
- Chapter 4 - Part 1Документ53 страницыChapter 4 - Part 1Bereket MulugetaОценок пока нет
- Distortion Modeling of PIN Diode Switches and Attenuators - CaverlyДокумент4 страницыDistortion Modeling of PIN Diode Switches and Attenuators - CaverlySinisa HristovОценок пока нет
- ECE 2100 LSN 33 1st Order Circuits 1Документ26 страницECE 2100 LSN 33 1st Order Circuits 1Hassan Al BaityОценок пока нет
- Tutorial 6Документ2 страницыTutorial 6Saransh MittalОценок пока нет
- Chp-7-First Order CircuitsДокумент25 страницChp-7-First Order CircuitsHuman BeingОценок пока нет
- LMH - Chapter6-Time Domain Circuit AnalysisДокумент105 страницLMH - Chapter6-Time Domain Circuit AnalysisNguyen Son N NguyenОценок пока нет
- Automatic Control Systems Lec.4Документ35 страницAutomatic Control Systems Lec.4Mohamed ElsoodyОценок пока нет
- Chapter 2Документ66 страницChapter 2chalaОценок пока нет
- Course Description L. No Topic Topic Outcomes Unit - I: at The End of The Topic, The Student Will Be Able ToДокумент3 страницыCourse Description L. No Topic Topic Outcomes Unit - I: at The End of The Topic, The Student Will Be Able ToTejaОценок пока нет
- Nodal AnalysisДокумент51 страницаNodal AnalysisKasani Tirumala tejaОценок пока нет
- EE254: D2 Buck ConverterДокумент13 страницEE254: D2 Buck ConverterNeil Hildick-SmithОценок пока нет
- New Wireless Power Transfer Via MagneticДокумент5 страницNew Wireless Power Transfer Via Magneticseraph705Оценок пока нет
- RectifiersДокумент51 страницаRectifiersfa21-bee-015100% (1)
- ESC201AT: Introduction To Electronics: Lecture-3: Tools For Circuit Analysis-1Документ34 страницыESC201AT: Introduction To Electronics: Lecture-3: Tools For Circuit Analysis-1Shubham KumarОценок пока нет
- II. Transformers: TransformerДокумент22 страницыII. Transformers: TransformerEmircan AykarОценок пока нет
- Chapter 4: Microwave Network AnalysisДокумент6 страницChapter 4: Microwave Network AnalysisGus RodriguezОценок пока нет
- Review of 1-AC Circuit FundamentalsДокумент52 страницыReview of 1-AC Circuit FundamentalsNZОценок пока нет
- Alexander CH 02 Final R 1Документ16 страницAlexander CH 02 Final R 1kifle203Оценок пока нет
- Chapter 6Документ25 страницChapter 6chalaОценок пока нет
- Chapter 4 - Control System ModellingДокумент65 страницChapter 4 - Control System Modellingvenosyah devanОценок пока нет
- Physics ProjectДокумент17 страницPhysics ProjectNasa ProjectОценок пока нет
- Carpentry NC Ii: Daniel David L. TalaveraДокумент5 страницCarpentry NC Ii: Daniel David L. TalaveraKhael Angelo Zheus JaclaОценок пока нет
- Chapter 4 PDFДокумент26 страницChapter 4 PDFMeloy ApiladoОценок пока нет
- Exploring Nurses' Knowledge of The Glasgow Coma Scale in Intensive Care and Emergency Departments at A Tertiary Hospital in Riyadh City, Saudi ArabiaДокумент9 страницExploring Nurses' Knowledge of The Glasgow Coma Scale in Intensive Care and Emergency Departments at A Tertiary Hospital in Riyadh City, Saudi Arabianishu thapaОценок пока нет
- CD4 12-P374493Документ30 страницCD4 12-P374493suraj_savant1Оценок пока нет
- Important Instructions For Winter-2020 MCQ Based Online ExaminationДокумент1 страницаImportant Instructions For Winter-2020 MCQ Based Online Examinationdenoh32751Оценок пока нет
- The Frozen Path To EasthavenДокумент48 страницThe Frozen Path To EasthavenDarwin Diaz HidalgoОценок пока нет
- GDCR - Second RevisedДокумент290 страницGDCR - Second RevisedbhaveshbhoiОценок пока нет
- Ahu 1997 22 1 95Документ15 страницAhu 1997 22 1 95Pasajera En TranceОценок пока нет
- The Origin, Nature, and Challenges of Area Studies in The United StatesДокумент22 страницыThe Origin, Nature, and Challenges of Area Studies in The United StatesannsaralondeОценок пока нет
- Coping Mechanism and Academic Performance Among FiДокумент14 страницCoping Mechanism and Academic Performance Among FiMary Margaret MorillaОценок пока нет
- ELS 15 Maret 2022 REVДокумент14 страницELS 15 Maret 2022 REVhelto perdanaОценок пока нет
- Porifera and CnidariaДокумент16 страницPorifera and CnidariaMichaelОценок пока нет
- DGKCC Internship ReportДокумент17 страницDGKCC Internship ReportMuhammad AtharОценок пока нет
- Embraer ERJ-170: Power PlantДокумент5 страницEmbraer ERJ-170: Power Plantபென்ஸிஹர்Оценок пока нет
- Kübra Şendoğan CVДокумент5 страницKübra Şendoğan CVKübra ŞendoğanОценок пока нет
- Second Quarter Lesson 4Документ7 страницSecond Quarter Lesson 4Jomarie PauleОценок пока нет
- Angles, Bearings and AzimuthДокумент10 страницAngles, Bearings and AzimuthMarc Dared CagaoanОценок пока нет
- Recent Advances in Dielectric-Resonator Antenna TechnologyДокумент14 страницRecent Advances in Dielectric-Resonator Antenna Technologymarceloassilva7992Оценок пока нет
- Topic - Temperature SensorДокумент9 страницTopic - Temperature SensorSaloni ChaudharyОценок пока нет
- Film Interpretation and Reference RadiographsДокумент7 страницFilm Interpretation and Reference RadiographsEnrique Tavira67% (3)
- Dadm Assesment #2: Akshat BansalДокумент24 страницыDadm Assesment #2: Akshat BansalAkshatОценок пока нет
- Math 10 Week 3-4Документ2 страницыMath 10 Week 3-4Rustom Torio QuilloyОценок пока нет
- Course 3 Mathematics Common Core Workbook AnswersДокумент4 страницыCourse 3 Mathematics Common Core Workbook Answerspqdgddifg100% (1)
- Article1414509990 MadukweДокумент7 страницArticle1414509990 MadukweemmypuspitasariОценок пока нет
- Test Bank For Global Marketing Management 6th Edition Masaaki Mike Kotabe Kristiaan HelsenДокумент34 страницыTest Bank For Global Marketing Management 6th Edition Masaaki Mike Kotabe Kristiaan Helsenfraught.oppugnerp922o100% (43)
- The Role of IT in TQM L'Oreal Case StudyДокумент9 страницThe Role of IT in TQM L'Oreal Case StudyUdrea RoxanaОценок пока нет
- Traulsen RHT-AHT Reach in Refrigerator WUT Glass DoorДокумент2 страницыTraulsen RHT-AHT Reach in Refrigerator WUT Glass Doorwsfc-ebayОценок пока нет
- The Eye WorksheetДокумент3 страницыThe Eye WorksheetCally ChewОценок пока нет
- The Life Cycle of Brent FieldДокумент21 страницаThe Life Cycle of Brent FieldMalayan AjumovicОценок пока нет
- BPI - I ExercisesДокумент241 страницаBPI - I Exercisesdivyajeevan89Оценок пока нет