Вам также может понравиться
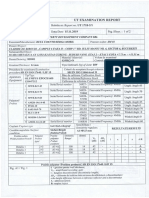
- Buletin Verificare Sudura Ultrasunete Scara Etaj 2-3Документ4 страницыBuletin Verificare Sudura Ultrasunete Scara Etaj 2-3Vlad NeacsuОценок пока нет
- Pilkington Profilit SpecДокумент62 страницыPilkington Profilit SpecPrunici IonОценок пока нет
- Adobe Illustrator cs3 Serial Number Keygen PDFДокумент1 страницаAdobe Illustrator cs3 Serial Number Keygen PDFCatalin ChiperОценок пока нет
- Serial ArchiCADДокумент1 страницаSerial ArchiCADNur Muchamad0% (1)
- Cortizo (Unit 66 Unitized Façade) - 20-24283-3364-S (EN)Документ1 страницаCortizo (Unit 66 Unitized Façade) - 20-24283-3364-S (EN)safdОценок пока нет
- Terrace design and construction detailsДокумент24 страницыTerrace design and construction detailsama29Оценок пока нет
- Gard Electric Circuit Schematic and Parts ListДокумент3 страницыGard Electric Circuit Schematic and Parts ListFlorin MintaОценок пока нет
- Fisa Tehnica de Securitate ADEZIV EDR-finalДокумент1 страницаFisa Tehnica de Securitate ADEZIV EDR-finalSilviuОценок пока нет
- Catalog Armstrong Tavane CasetateДокумент29 страницCatalog Armstrong Tavane CasetateAlexandru BaccelaОценок пока нет
- Informatii despre produsul ALUCOBONDДокумент97 страницInformatii despre produsul ALUCOBONDHangan Georgiana100% (1)
- Benzinarie Chiajna - PTH - Rev 2-R01Документ1 страницаBenzinarie Chiajna - PTH - Rev 2-R01sephoraengОценок пока нет
- NVX80 Ei00 PDFДокумент20 страницNVX80 Ei00 PDFZoltan MarosanОценок пока нет
- Losa de Cubierta - Bloque de Aulas - Nivel +8.82 (+19.50) : Instituto Superior Tecnológico en AtacamesДокумент1 страницаLosa de Cubierta - Bloque de Aulas - Nivel +8.82 (+19.50) : Instituto Superior Tecnológico en Atacamesstalin vОценок пока нет
- Terasa Recirculabila Cu Pietris Detaliu de Scurgere Laterala 25161Документ1 страницаTerasa Recirculabila Cu Pietris Detaliu de Scurgere Laterala 25161Gorgan VladОценок пока нет
- A-03 Plan ParterДокумент1 страницаA-03 Plan ParterMirunaОценок пока нет
- System Variables: BricscadДокумент8 страницSystem Variables: BricscadAlex MihailaОценок пока нет
- Proiect Casa PrispaДокумент319 страницProiect Casa Prispaand.simonescuОценок пока нет
- Wagner Titanus Microsens eДокумент4 страницыWagner Titanus Microsens eprakash2008aОценок пока нет
- Hub IntermodalДокумент25 страницHub IntermodalLucian AnastasiuОценок пока нет
- Pachet Fotovoltaic 3,22 KWPДокумент6 страницPachet Fotovoltaic 3,22 KWPmaxmaiaОценок пока нет
- BIZHUB 240f SM PDFДокумент355 страницBIZHUB 240f SM PDFBranga CorneliuОценок пока нет
- Convertizor de Frecventa Delta ManualДокумент25 страницConvertizor de Frecventa Delta ManualdanimihalcaОценок пока нет
- Latest Date For Receipt of Comments: 28 October 2023: Form 36Документ131 страницаLatest Date For Receipt of Comments: 28 October 2023: Form 36J MrОценок пока нет
- Plan ParterДокумент1 страницаPlan ParterTudorreanu VitalykОценок пока нет
- Kahler Slater What Makes A Great Workplace White PaperДокумент22 страницыKahler Slater What Makes A Great Workplace White PaperBarbara Backus JahnckeОценок пока нет
- 00 Calcul TermoДокумент23 страницы00 Calcul TermoSzabolcs BarthaОценок пока нет
- Săpătură 16.016 MC: TSA01B1 SAP - MAN.IN ConsumДокумент6 страницSăpătură 16.016 MC: TSA01B1 SAP - MAN.IN ConsumJoey Cross fxОценок пока нет
- AllPlan Nemetchek 3d Tutorial 2005Документ190 страницAllPlan Nemetchek 3d Tutorial 2005ČovjeknОценок пока нет
- Inedic Manual en - Innovation and Ecodesign in The Ceramic IndustryДокумент163 страницыInedic Manual en - Innovation and Ecodesign in The Ceramic Industryfrancisco33Оценок пока нет
- General Loxone PresentationДокумент36 страницGeneral Loxone PresentationPaul HotiuОценок пока нет
- INT AC19 Training Series Vol 1Документ35 страницINT AC19 Training Series Vol 1許勝富Оценок пока нет
- Structural design document SE2-SE3Документ1 страницаStructural design document SE2-SE3Andreea MarinОценок пока нет
- Catalogue ExpДокумент463 страницыCatalogue ExpmarioLhrОценок пока нет
- 9361 HC V3 ASKEY Datasheet October 2013Документ2 страницы9361 HC V3 ASKEY Datasheet October 2013Wahyu SetyaОценок пока нет
- Robin ConfigДокумент6 страницRobin ConfigMustafa CelebiОценок пока нет
- Robin - Nano - Cfghdknas, Dkasdladoipq Pid PadaidДокумент7 страницRobin - Nano - Cfghdknas, Dkasdladoipq Pid PadaidMarc AlamoОценок пока нет
- Robin Nano35 CFGДокумент7 страницRobin Nano35 CFGSebas CarnigliaОценок пока нет
- Post Mastercam 4 AxisДокумент62 страницыPost Mastercam 4 AxisGiacongcokhi CokhihotroОценок пока нет
- Makino Basic ProgrammingДокумент104 страницыMakino Basic ProgrammingAPSARAUSA100% (8)
- Measuring motor revs/inch or mm's/revДокумент3 страницыMeasuring motor revs/inch or mm's/revCarlos RodriguezОценок пока нет
- ConfigДокумент4 страницыConfigali almorsedОценок пока нет
- TOPCNC TC55V Instruction Manual: TOPCNC Automation Technology Co., Ltd. Felicia JiaДокумент13 страницTOPCNC TC55V Instruction Manual: TOPCNC Automation Technology Co., Ltd. Felicia Jiaanhthong3kОценок пока нет
- Output LogДокумент30 страницOutput LogLORENA TORRES CASTILLOОценок пока нет
- New TOPCNC TC55V Instruction ManualДокумент14 страницNew TOPCNC TC55V Instruction ManualCarlos SerranoОценок пока нет
- Marlin Traduccion AdvДокумент153 страницыMarlin Traduccion AdvRaul CampaОценок пока нет
- Best Barn Door Tracker CodeДокумент9 страницBest Barn Door Tracker CodeBiswajeet MishraОценок пока нет
- 1/16-Din Process Controller Concise Product Manual (59300-2)Документ2 страницы1/16-Din Process Controller Concise Product Manual (59300-2)Dilan BvlyОценок пока нет
- Assignment 1Документ13 страницAssignment 1Aniket PanigrahiОценок пока нет
- TC55V CNC Instruction ManualДокумент13 страницTC55V CNC Instruction Manualanhthong3kОценок пока нет
- (4.5.0 ZULU Beta) (DIFF ALL) BTFL - Cli - 20230910 - 161732Документ5 страниц(4.5.0 ZULU Beta) (DIFF ALL) BTFL - Cli - 20230910 - 161732Dan MultiОценок пока нет
- How To Program A 3D Printer With Marlin and ArduinДокумент8 страницHow To Program A 3D Printer With Marlin and ArduinawwabfaizОценок пока нет
- TOPCNC TC55V Instruction ManualДокумент13 страницTOPCNC TC55V Instruction ManualLuis Otavio TrindadeОценок пока нет
- 4001,4130 Batch 15Документ41 страница4001,4130 Batch 15jvanandhОценок пока нет
- Postability Post Processor DocumentationДокумент15 страницPostability Post Processor DocumentationMustapha BenabedОценок пока нет
- (4.5.0 ZULU Beta) (DIFF ALL) BTFL - Cli - 20230916 - 172123Документ6 страниц(4.5.0 ZULU Beta) (DIFF ALL) BTFL - Cli - 20230916 - 172123Dan MultiОценок пока нет
- JF Hawk T1 VrconfigДокумент5 страницJF Hawk T1 VrconfigMicha de JongОценок пока нет
- (4.5.0 ZULU Beta) (DIFF ALL) BTFL - Cli - Lumenier - 20230917 - 004634Документ6 страниц(4.5.0 ZULU Beta) (DIFF ALL) BTFL - Cli - Lumenier - 20230917 - 004634Dan MultiОценок пока нет
- VLT2800 Quick Guide PDFДокумент2 страницыVLT2800 Quick Guide PDFlieldОценок пока нет
- Gcod Pentru ArduinoДокумент11 страницGcod Pentru ArduinominossotaОценок пока нет
- Apex Frame Voor JimmyДокумент3 страницыApex Frame Voor JimmyJoep van der MeijdenОценок пока нет
- List EhjadhjakДокумент284 страницыList EhjadhjakMarc AlamoОценок пока нет
- How To Custom Icon 2020-04-11Документ6 страницHow To Custom Icon 2020-04-11heldaneОценок пока нет
- PLA 3D Printing Material ColorsДокумент4 страницыPLA 3D Printing Material ColorsMarc AlamoОценок пока нет
- Robin - Nano - Cfghdknas, Dkasdladoipq Pid PadaidДокумент7 страницRobin - Nano - Cfghdknas, Dkasdladoipq Pid PadaidMarc AlamoОценок пока нет
- BTT TFT35 V2.0 Bootloader Flashing GuideДокумент5 страницBTT TFT35 V2.0 Bootloader Flashing GuideMarc AlamoОценок пока нет
- In Case There Is A Problem With Your OrderДокумент1 страницаIn Case There Is A Problem With Your OrderMarc AlamoОценок пока нет
- Checkout: Payment Method Place OrderДокумент2 страницыCheckout: Payment Method Place OrderMarc AlamoОценок пока нет
- Phy13 Exit Exam ReviewДокумент4 страницыPhy13 Exit Exam ReviewAngelo Joshua De LeonОценок пока нет
- Material Freedom: How Ultimaker Unlocks 3D Printing ApplicationsДокумент18 страницMaterial Freedom: How Ultimaker Unlocks 3D Printing Applicationsahmed shaikОценок пока нет
- Cr-10 S5 Clone Print Size 500x500x600mmДокумент2 страницыCr-10 S5 Clone Print Size 500x500x600mmMarc Alamo0% (1)
- Aisc Shapes Database v15.0Документ14 страницAisc Shapes Database v15.0ErickSimonОценок пока нет
- How To Customize Fonts 2019-11-11Документ3 страницыHow To Customize Fonts 2019-11-11heldaneОценок пока нет
- COVID-19 Vaccination Training For Health WorkersДокумент6 страницCOVID-19 Vaccination Training For Health WorkersMYRIAN GALVISОценок пока нет
- CR-10 BomДокумент12 страницCR-10 BomMarc AlamoОценок пока нет
- ReadmeДокумент1 страницаReadmeLevente BajcziОценок пока нет
- How To Customize Fonts 2019-11-11Документ3 страницыHow To Customize Fonts 2019-11-11heldaneОценок пока нет
- Thank You For Your OrderДокумент1 страницаThank You For Your OrderMarc AlamoОценок пока нет
- How To Add A New Language 2020-04-11Документ3 страницыHow To Add A New Language 2020-04-11heldaneОценок пока нет
- Coconut Production in Southern TagalogДокумент112 страницCoconut Production in Southern TagalogMario Vergel Ocampo100% (1)
- Roadway Engineer Roadway Engineer Roadway Engineer Roadway EngineerДокумент3 страницыRoadway Engineer Roadway Engineer Roadway Engineer Roadway EngineerMarc AlamoОценок пока нет
- How To Add A New Language 2020-04-11Документ3 страницыHow To Add A New Language 2020-04-11heldaneОценок пока нет
- How To Custom Icon 2020-04-11Документ6 страницHow To Custom Icon 2020-04-11heldaneОценок пока нет
- Design of Combined-Footings by Is-456Документ48 страницDesign of Combined-Footings by Is-456jkedar_7860% (5)
- Research PermeabilityДокумент1 страницаResearch PermeabilityMarc AlamoОценок пока нет
- Atterberg LimitsДокумент3 страницыAtterberg LimitsMarc AlamoОценок пока нет
- AFM Membership Form 2018AFM Membership Form 2018AFM Membership Form 2018AFM Membership Form 2018Документ2 страницыAFM Membership Form 2018AFM Membership Form 2018AFM Membership Form 2018AFM Membership Form 2018Marc AlamoОценок пока нет
- Coconut Oil Extraction by A New Enzymatic ProcessДокумент3 страницыCoconut Oil Extraction by A New Enzymatic ProcessLêonärdoMolänoОценок пока нет
- TrialДокумент1 страницаTrialMarc AlamoОценок пока нет
- Atterberg LimitsДокумент3 страницыAtterberg LimitsMarc AlamoОценок пока нет
- How To Improve Your Model With An Advanced Reward Function PDFДокумент3 страницыHow To Improve Your Model With An Advanced Reward Function PDFmeajagunОценок пока нет
- Manual Sap2000 Etabs Safe CsbridgeДокумент494 страницыManual Sap2000 Etabs Safe CsbridgeJosé Manuel Mateo VicenteОценок пока нет
- Reflection-Mirror Through An Arbitrary PlaneДокумент12 страницReflection-Mirror Through An Arbitrary PlaneIgor GjorgjievОценок пока нет
- Models of The Cutting Edge Geometry of Medical NeedlesДокумент11 страницModels of The Cutting Edge Geometry of Medical Needlesmohammadreza hajialiОценок пока нет
- 2013 Science Fair Project PacketДокумент24 страницы2013 Science Fair Project Packetapi-233119992Оценок пока нет
- Master Cam Design - Help TopicsДокумент257 страницMaster Cam Design - Help TopicsUthayan SP100% (1)
- Vibrating Screen Workshop SimulationДокумент32 страницыVibrating Screen Workshop SimulationRudy Jaramillo100% (1)
- Chapter08-The New SevenTools For Management and PlanningДокумент24 страницыChapter08-The New SevenTools For Management and Planningjade chavezОценок пока нет
- MPE Review: Logarithmic & Exponential FunctionsДокумент38 страницMPE Review: Logarithmic & Exponential FunctionsonyejekweОценок пока нет
- Introduction To Graphs Handout & WorksheetДокумент6 страницIntroduction To Graphs Handout & WorksheetAnjishnu TedОценок пока нет
- Block Modelling Techniques and Estimation MethodsДокумент83 страницыBlock Modelling Techniques and Estimation Methodsdimitrijeilic100% (2)
- Compact 1000 Operator ManualДокумент47 страницCompact 1000 Operator ManualPham LongОценок пока нет
- Steel BS Parameter PDFДокумент8 страницSteel BS Parameter PDFdpkОценок пока нет
- Rzeppa Joint Imeche2Документ29 страницRzeppa Joint Imeche2Manoah Stephen0% (1)
- R Wilman 17325509 Edpr3000 Assessment 2Документ19 страницR Wilman 17325509 Edpr3000 Assessment 2api-314401095Оценок пока нет
- 2013 Ijc P1Документ6 страниц2013 Ijc P1Yvonne GohohoОценок пока нет
- Chapter-02 by M.A.HALIMДокумент10 страницChapter-02 by M.A.HALIMArnobОценок пока нет
- Calculus 1 Analytic Geometry Cheat SheetДокумент1 страницаCalculus 1 Analytic Geometry Cheat SheetStephanie DulaОценок пока нет
- Two-Dimensional Geometric TransformationsДокумент41 страницаTwo-Dimensional Geometric Transformationsreem goОценок пока нет
- Tutorial Ip 2 Win EnglishДокумент25 страницTutorial Ip 2 Win EnglishGarry Zein0% (1)
- 1977-Foschi-Analysis of Wood Diaphragms and Trusses - Part I DiaphragmsДокумент8 страниц1977-Foschi-Analysis of Wood Diaphragms and Trusses - Part I DiaphragmsJuan AlemanОценок пока нет
- Chpater 4 Complex NumbersДокумент19 страницChpater 4 Complex NumbersChandramouli GuptaОценок пока нет
- Advanced Mechanic Drawing PDFДокумент220 страницAdvanced Mechanic Drawing PDFelenalucaОценок пока нет
- Diamond401 SW ManualДокумент33 страницыDiamond401 SW ManualMiranda HéctorОценок пока нет
- Stress Transformation Using Mohr's CircleДокумент7 страницStress Transformation Using Mohr's CirclePalash RoyChoudhuryОценок пока нет
- SAT Mathematics (With Calculator) Practice Test 4 - Assistive TechnologyДокумент47 страницSAT Mathematics (With Calculator) Practice Test 4 - Assistive TechnologyApexx LegendsОценок пока нет
- Chapter 3 Coordinate GeometryДокумент46 страницChapter 3 Coordinate GeometryJojobaby51714Оценок пока нет
- Introduction To Robotic Manipulators, KinematicsДокумент5 страницIntroduction To Robotic Manipulators, KinematicsSrujanPanugantiОценок пока нет
- MasterCAM X4 Handbook Volume 1Документ79 страницMasterCAM X4 Handbook Volume 1tuanvn7675% (4)