Вам также может понравиться
- IM316 - Sheet 2 - Linear Profiles - Model Answer Q1Документ2 страницыIM316 - Sheet 2 - Linear Profiles - Model Answer Q1يحيى الأثلهОценок пока нет
- Dados de MáquinaДокумент9 страницDados de MáquinaAilton Luiz Vasques PalacioОценок пока нет
- NC Part Programming: Manual Programming (G-Code)Документ5 страницNC Part Programming: Manual Programming (G-Code)AyasОценок пока нет
- Home Products Service Solutions Download About Us ForumДокумент1 страницаHome Products Service Solutions Download About Us ForumEduardo QuiñonesОценок пока нет
- 0299 251 2 Sys Di en 144Документ36 страниц0299 251 2 Sys Di en 144api-19483250100% (1)
- Infineon CDM10V DS v01 - 03 ENДокумент20 страницInfineon CDM10V DS v01 - 03 ENJakieОценок пока нет
- NV156FHM N46Документ33 страницыNV156FHM N46Clash RoyaleОценок пока нет
- N30 Supervisory Controller InstallationДокумент22 страницыN30 Supervisory Controller Installationminhtutran1983Оценок пока нет
- DNI5712 Issue 2 DS1 Digital Network Interface Connector: (CLEI Code: NCIUCJK4AA)Документ8 страницDNI5712 Issue 2 DS1 Digital Network Interface Connector: (CLEI Code: NCIUCJK4AA)Kendric ShahidОценок пока нет
- NTC 2018 Example 002Документ14 страницNTC 2018 Example 002Mohamed Abo-ZaidОценок пока нет
- Experiment No.-1: Page 1 of 25Документ25 страницExperiment No.-1: Page 1 of 25PavaniОценок пока нет
- Trouble Shooting GuideДокумент8 страницTrouble Shooting Guidetis_prasetyoОценок пока нет
- Cdm10Vd: FeaturesДокумент17 страницCdm10Vd: Featureszuffflor_925748656Оценок пока нет
- Weg CFW 09rb Regenerative Converter User Guide enДокумент54 страницыWeg CFW 09rb Regenerative Converter User Guide enReiОценок пока нет
- Software Verification: NTC 2018 Example 001Документ8 страницSoftware Verification: NTC 2018 Example 001Mohamed Abo-ZaidОценок пока нет
- Ford FANUC R30iA R30iB NextGen E164Документ140 страницFord FANUC R30iA R30iB NextGen E164marialuisafloressanabriaОценок пока нет
- Digital Integrated Circuit Design: Subject Code:18EC2019Документ8 страницDigital Integrated Circuit Design: Subject Code:18EC2019shiny johnОценок пока нет
- DMF50174ZNB FWДокумент18 страницDMF50174ZNB FWNemesys TOFОценок пока нет
- BN44 00066acb PDFДокумент11 страницBN44 00066acb PDFHeron Cesar VieiraОценок пока нет
- C - Tutorial Pages 119 211Документ93 страницыC - Tutorial Pages 119 211Christophe DerenneОценок пока нет
- CDM10V-2: Feature ListДокумент12 страницCDM10V-2: Feature Listzuffflor_925748656Оценок пока нет
- NTC 2008 Example 002 PDFДокумент14 страницNTC 2008 Example 002 PDFMohamed Abo-ZaidОценок пока нет
- Soft-Starter: Programming ManualДокумент162 страницыSoft-Starter: Programming ManualThaylo PiresОценок пока нет
- High-Frequency Waveform Generator: - General Description - FeaturesДокумент16 страницHigh-Frequency Waveform Generator: - General Description - FeaturesahmedОценок пока нет
- FG Wilson DCP-10Документ32 страницыFG Wilson DCP-10Aung AungОценок пока нет
- SN03A Board Manual (36W) Driver LedДокумент18 страницSN03A Board Manual (36W) Driver LedNana CianchettaОценок пока нет
- 420010181500A (Parameter List)Документ46 страниц420010181500A (Parameter List)Francisco R100% (3)
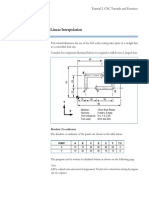
- Tutorial 2: Linear Interpolation: CNC Tutorials and Exercises Boxford DUET Tutorial 2Документ4 страницыTutorial 2: Linear Interpolation: CNC Tutorials and Exercises Boxford DUET Tutorial 2Miguel HPОценок пока нет
- Service Manual: 39" LCD TVДокумент56 страницService Manual: 39" LCD TVCarlos RuizОценок пока нет
- 3computer Numerical Control LEC 3Документ28 страниц3computer Numerical Control LEC 3regassa rajiОценок пока нет
- 3194E - 133-811 - DOC032 Digital RepeaterДокумент28 страниц3194E - 133-811 - DOC032 Digital RepeaterРинат СулеймановОценок пока нет
- MV238FHM - N10Документ30 страницMV238FHM - N10david weiОценок пока нет
- High-Speed, Analog-to-Digital Converter BasicsДокумент26 страницHigh-Speed, Analog-to-Digital Converter BasicsAdrian SuОценок пока нет
- Experiment No 8Документ1 страницаExperiment No 8Mayur Madhukar MankarОценок пока нет
- NV140FHM N49Документ33 страницыNV140FHM N49KathaОценок пока нет
- User Manual Part V 1263945Документ104 страницыUser Manual Part V 1263945jgrisi065757Оценок пока нет
- Lenovo 9220 HB1 LCD Monitor Service ManualДокумент65 страницLenovo 9220 HB1 LCD Monitor Service Manualjuraj66Оценок пока нет
- Finglow N7Документ2 страницыFinglow N7RobinReyndersОценок пока нет
- Emerson Lc501em3 Magnavox 50mf412b f7 Chassis fl12.5 PDFДокумент55 страницEmerson Lc501em3 Magnavox 50mf412b f7 Chassis fl12.5 PDFAnibal100% (1)
- Obsolete Product(s) - Obsolete Product(s)Документ24 страницыObsolete Product(s) - Obsolete Product(s)David MendezОценок пока нет
- Service Manual: 39" LCD TVДокумент66 страницService Manual: 39" LCD TVFederico UrquizaОценок пока нет
- Design Calculation For Raising PlateformДокумент15 страницDesign Calculation For Raising PlateformAbdul Hameed100% (1)
- Network Inter Working Between GSM MAP and ANSI-41 CDMAДокумент547 страницNetwork Inter Working Between GSM MAP and ANSI-41 CDMAapi-3815142100% (1)
- Harsen Gu320bДокумент42 страницыHarsen Gu320bAdonis TabiosОценок пока нет
- 07 B01961158 Rev.B DME Field Adjustment ManualДокумент41 страница07 B01961158 Rev.B DME Field Adjustment ManualKial YoucefОценок пока нет
- BME 3112 Exp#04 FIR Filter Window MethodДокумент6 страницBME 3112 Exp#04 FIR Filter Window MethodMuhammad Muinul IslamОценок пока нет
- Package Final 11-08Документ72 страницыPackage Final 11-08Rodger SenaОценок пока нет
- Obsolete Product(s) - Obsolete Product(s) : 2 Mbit (256Kb X 8) UV EPROM and OTP EPROMДокумент26 страницObsolete Product(s) - Obsolete Product(s) : 2 Mbit (256Kb X 8) UV EPROM and OTP EPROMBermeo Perez MichaelОценок пока нет
- GPD 205 Technical Manual: Magne TekДокумент88 страницGPD 205 Technical Manual: Magne TekUsman ShahОценок пока нет
- B173HW02 V1 AuoДокумент32 страницыB173HW02 V1 AuoMVDОценок пока нет
- Telys 2 - Master t100 - Revfev09Документ101 страницаTelys 2 - Master t100 - Revfev09RickОценок пока нет
- 110minh LC03 CosyДокумент4 страницы110minh LC03 CosyThe vinh BuiОценок пока нет
- Artificial Intelligence Applications in Power Systems - SlidesДокумент90 страницArtificial Intelligence Applications in Power Systems - SlidesLadla Shyam KaОценок пока нет
- Ba00340gen 1923-00Документ72 страницыBa00340gen 1923-00Cristóbal Cárdenas CabezaОценок пока нет
- Autopipe Nozzle Report: Model Name - A53-B-PДокумент8 страницAutopipe Nozzle Report: Model Name - A53-B-PPaul Ticla PuenteОценок пока нет
- Calcul LantДокумент2 страницыCalcul LantDiana Maria CozmaОценок пока нет
- Subject: Computer Aided Manufacturing Topic: CNC ProgrammingДокумент12 страницSubject: Computer Aided Manufacturing Topic: CNC ProgrammingAman RizviОценок пока нет
- Basic Digital Signal Processing: Butterworths Basic SeriesОт EverandBasic Digital Signal Processing: Butterworths Basic SeriesРейтинг: 5 из 5 звезд5/5 (1)
- Envizi L4 POX - Target Setting and Tracking Configuring Bottom Up TargetsДокумент6 страницEnvizi L4 POX - Target Setting and Tracking Configuring Bottom Up TargetszvranicОценок пока нет
- Wood Texture - Google SearchДокумент1 страницаWood Texture - Google SearchkazОценок пока нет
- Instruction Manual VA 5xx Modbus RTU Slave InstallationДокумент28 страницInstruction Manual VA 5xx Modbus RTU Slave InstallationMuhammad JunaidОценок пока нет
- Reset Password of OMU Portal (Espace VCN3000) - Huawei Enterprise Support CommunityДокумент6 страницReset Password of OMU Portal (Espace VCN3000) - Huawei Enterprise Support CommunityamilperОценок пока нет
- 008399-003 PTKJ Jca Jce Api Tutorial Rev BДокумент22 страницы008399-003 PTKJ Jca Jce Api Tutorial Rev Bbadivot730Оценок пока нет
- Marklogic Server: Xquery and XSLT Reference GuideДокумент98 страницMarklogic Server: Xquery and XSLT Reference GuideAbdullah YahyaОценок пока нет
- Stack TraceДокумент13 страницStack TraceGuilherme KaiserОценок пока нет
- Python + ML + Java + Full Stack DevelopmentДокумент1 страницаPython + ML + Java + Full Stack DevelopmentSrivatsav DamarajuОценок пока нет
- MCQS Set Oop PDFДокумент189 страницMCQS Set Oop PDFRodolfo Jr. RoasaОценок пока нет
- TP 3Документ3 страницыTP 3Iram KasanОценок пока нет
- Test Automation Strategy in 2021: The Ultimate ChecklistДокумент16 страницTest Automation Strategy in 2021: The Ultimate ChecklistANAОценок пока нет
- Adventures With The AtariДокумент372 страницыAdventures With The AtariIman MirblokiОценок пока нет
- Google Sheets Template PackДокумент26 страницGoogle Sheets Template PackjoseclrОценок пока нет
- EMTECH 2nd Grading 1Документ6 страницEMTECH 2nd Grading 1Alfie Lyn PedregosaОценок пока нет
- Simplify & Reuse Driver Code: With RegmapsДокумент25 страницSimplify & Reuse Driver Code: With RegmapshdsetanhdsetaОценок пока нет
- Wati Dan Khasanah 2019 - Jurnal SIДокумент8 страницWati Dan Khasanah 2019 - Jurnal SIzed rangkutiОценок пока нет
- HCIE-DC V1.0 Training Material 5 Cloud Data Center Backup and Disaster Recovery SolutionsДокумент183 страницыHCIE-DC V1.0 Training Material 5 Cloud Data Center Backup and Disaster Recovery SolutionsCarlos ChavezОценок пока нет
- Control Systems Engineer Resume SampleДокумент7 страницControl Systems Engineer Resume Sampleafmgouewajkkdu100% (1)
- Reflection - LINKED IN LEARNING MIDTERMSДокумент2 страницыReflection - LINKED IN LEARNING MIDTERMSariane galenoОценок пока нет
- Power Distribution Units (PDU) : WWW - Rittal.usДокумент4 страницыPower Distribution Units (PDU) : WWW - Rittal.usDreОценок пока нет
- Technology and Livelihood Education Computer Systems Servicing 9Документ3 страницыTechnology and Livelihood Education Computer Systems Servicing 9Matoy Gab'zОценок пока нет
- Error Detecting and Correcting Codes: Appendix AДокумент143 страницыError Detecting and Correcting Codes: Appendix AEhtasham JilaniОценок пока нет
- WWW Indiabix ComДокумент2 страницыWWW Indiabix Comvigneshwaransankaran50% (2)
- Lab # 1Документ11 страницLab # 1Aaron SamsonОценок пока нет
- 10 Coolest Jobs in CybersecurityДокумент1 страница10 Coolest Jobs in CybersecurityHajaОценок пока нет
- Triad - Square-Company ProfileДокумент42 страницыTriad - Square-Company Profilemanikanth draОценок пока нет
- Punjab Police SI Intelligence Officer Previous PapersДокумент38 страницPunjab Police SI Intelligence Officer Previous Papershk3987gmailcomОценок пока нет
- Jupyterlab: The Evolution of The Jupyter NotebookДокумент22 страницыJupyterlab: The Evolution of The Jupyter Notebookjesus alamillaОценок пока нет
- Pirates of Silicon ValleyДокумент3 страницыPirates of Silicon ValleyJedd HernandezОценок пока нет
- Unit II - FullДокумент24 страницыUnit II - FullR.SwethaОценок пока нет