Вам также может понравиться
- Chapitre I PDFДокумент7 страницChapitre I PDFRamzi OunisОценок пока нет
- Cours Et TD de Mécanique Des Fluides 1 (2020) LPEGCДокумент60 страницCours Et TD de Mécanique Des Fluides 1 (2020) LPEGCArbaoui HibaОценок пока нет
- Cours Hydraulique Generale Etudiant 2022 ESBTPДокумент135 страницCours Hydraulique Generale Etudiant 2022 ESBTPGONTOH CampbelОценок пока нет
- MDF 1Документ8 страницMDF 1Step WeyОценок пока нет
- Chapitre I - Hydraulique en ChargeДокумент8 страницChapitre I - Hydraulique en ChargesouraОценок пока нет
- Cours MDF 2021 Chap.3 Et4Документ45 страницCours MDF 2021 Chap.3 Et4Lina alikhОценок пока нет
- Mecanique Des FluidesДокумент9 страницMecanique Des FluidesBelal FaridОценок пока нет
- Cours Mécanique Des Fluides 2ESAДокумент24 страницыCours Mécanique Des Fluides 2ESACrazy ytОценок пока нет
- Mecanique FluidesДокумент23 страницыMecanique FluidesBoubacar MbowОценок пока нет
- Mecanique Des Fluides - Intro - 2021-22Документ10 страницMecanique Des Fluides - Intro - 2021-22Donald NjatchabouОценок пока нет
- Chapitre I, Généralités Sur La MDF PDFДокумент6 страницChapitre I, Généralités Sur La MDF PDFAIT SAID TaouesОценок пока нет
- MDF NemouchiДокумент19 страницMDF NemouchibsbsjsjdhОценок пока нет
- Morad EL KAOUINI Cours de Mécanique Des Fluides SMP S6Документ106 страницMorad EL KAOUINI Cours de Mécanique Des Fluides SMP S6sakina lahssiniОценок пока нет
- Chapitre 0 Et 1 - Introduction - Généralités - Hydrostatique - 2Документ53 страницыChapitre 0 Et 1 - Introduction - Généralités - Hydrostatique - 2Hasnae DerrazОценок пока нет
- Cours de Mécanique Des Fluides - S2&S5DДокумент36 страницCours de Mécanique Des Fluides - S2&S5DHenriОценок пока нет
- 23 TM TS1 Toussaint Biophysique Hémodynamique ÉtudiantsДокумент24 страницы23 TM TS1 Toussaint Biophysique Hémodynamique Étudiantsrgzgxfgnp5Оценок пока нет
- MDF BarkaniДокумент112 страницMDF Barkanireda trolls /monawa3atОценок пока нет
- MDF 2020Документ34 страницыMDF 2020Chaima ZoraiОценок пока нет
- Chapitre 1 & 2Документ17 страницChapitre 1 & 2Hraiech Ibtissem100% (1)
- Chapitre 1 Bases ScientifiquesДокумент26 страницChapitre 1 Bases Scientifiquesahmed laicheОценок пока нет
- 01 Hydrostatique 2015-2016Документ38 страниц01 Hydrostatique 2015-2016mlОценок пока нет
- Chap 3 Mécanique Des Fluides SVTU 2016 17 VF1 20 AvrilДокумент20 страницChap 3 Mécanique Des Fluides SVTU 2016 17 VF1 20 AvrilazzamОценок пока нет
- CHAP1 Chap 1&2Документ24 страницыCHAP1 Chap 1&2Diakhate El hadji omarОценок пока нет
- CHAP 2cours Statique Des Fluides ENSAДокумент18 страницCHAP 2cours Statique Des Fluides ENSAam1856100% (1)
- Chap 3 VF Mécanique Des Fluides SVTU 2014 15Документ12 страницChap 3 VF Mécanique Des Fluides SVTU 2014 15setefav697Оценок пока нет
- Chapitre 3Документ28 страницChapitre 3Rezak AbdelazizОценок пока нет
- Cours - Statique Fluides 2020Документ61 страницаCours - Statique Fluides 2020imane elkssimiОценок пока нет
- Chapitre - 1MDF CP 2022Документ7 страницChapitre - 1MDF CP 2022Prog DZОценок пока нет
- Statique Des FluidesДокумент32 страницыStatique Des FluidesPauline SoulierОценок пока нет
- Méc de Fluides Chapitres 0 Et 1Документ65 страницMéc de Fluides Chapitres 0 Et 1Manal TouinsiОценок пока нет
- Généralité Sep 2023Документ7 страницGénéralité Sep 2023ASSASОценок пока нет
- Chapitre 2 - STATIQUE DES FLUIDESДокумент7 страницChapitre 2 - STATIQUE DES FLUIDESntji sangareОценок пока нет
- Cahier Remise A Niveau PhysiqueДокумент48 страницCahier Remise A Niveau PhysiqueAziz AgbaОценок пока нет
- MDF Chapi01Документ16 страницMDF Chapi01benhammaahmed70Оценок пока нет
- Fifiche de ThermoДокумент17 страницFifiche de ThermoJulio DibangoupОценок пока нет
- Chap 2 Rappels Bases ThéoriquesДокумент22 страницыChap 2 Rappels Bases ThéoriquesJamalChakibОценок пока нет
- Lu2me004 Chap1Документ24 страницыLu2me004 Chap1NoemОценок пока нет
- Fiche N°10 - FRANKEN - Biophysique de La CirculationДокумент11 страницFiche N°10 - FRANKEN - Biophysique de La CirculationmedОценок пока нет
- Chapitre 1Документ12 страницChapitre 1Manel BenidirОценок пока нет
- Chapitre 1Документ9 страницChapitre 1Abdelhani MoussaouiОценок пока нет
- Cours RheologieДокумент25 страницCours RheologieLouc Ing100% (1)
- 1spe Chap 5 Cours Poly Complete 1Документ4 страницы1spe Chap 5 Cours Poly Complete 1Aymen CHORFIОценок пока нет
- Cous Statique Cinématique VF 230208 120350 231018 103636Документ43 страницыCous Statique Cinématique VF 230208 120350 231018 103636Iki HiromiОценок пока нет
- Hydraulique - Generale - OGT ISTAG GLF 29 Juin 2022 Police 14Документ103 страницыHydraulique - Generale - OGT ISTAG GLF 29 Juin 2022 Police 14Cheickna Hamala SackoОценок пока нет
- Chapitre 1Документ25 страницChapitre 1Nourelhouda SELMANEОценок пока нет
- Chapitre 1Документ5 страницChapitre 1ahmedtoutou2003Оценок пока нет
- 2 Partie - Hydraulique GeneraleДокумент21 страница2 Partie - Hydraulique GeneraleGaël KabОценок пока нет
- Chapitre 2 - CARACTERISTIQUES ESSENTIELLES DES FLUIDESДокумент6 страницChapitre 2 - CARACTERISTIQUES ESSENTIELLES DES FLUIDESMamadou FAYEОценок пока нет
- Mouvement de ParticuleДокумент8 страницMouvement de Particulemouhamed el mehdi mouatez latrecheОценок пока нет
- MDF CH I Généralités Propriétés Ds Fluides - 8p65Документ8 страницMDF CH I Généralités Propriétés Ds Fluides - 8p65Nassym YakerОценок пока нет
- Cours PMC316 - Mecanique Des FluidesДокумент94 страницыCours PMC316 - Mecanique Des FluidesMilley's Chacha100% (2)
- Phénoménologie de La Turbulence Développée - Ordres de Grandeurs Et Quantités DimensionnantesДокумент9 страницPhénoménologie de La Turbulence Développée - Ordres de Grandeurs Et Quantités DimensionnantesJulien Bernier OuelletОценок пока нет
- Chapitre 1Документ13 страницChapitre 1Khaled ChaibОценок пока нет
- Fluides VisqueuxДокумент16 страницFluides Visqueuxoussama bensassiОценок пока нет
- M1: La Statique Des Fluides: I. Définitions GénéralesДокумент5 страницM1: La Statique Des Fluides: I. Définitions GénéralesBrahimi AssalaОценок пока нет
- I - Statique Des Fluides L3ENGДокумент31 страницаI - Statique Des Fluides L3ENGBilal Bouakrif100% (1)
- Travaux Diriges Avec CorrectionДокумент2 страницыTravaux Diriges Avec CorrectionAliOucharОценок пока нет
- Chapitre 2 Acoustique G.MДокумент79 страницChapitre 2 Acoustique G.MSaley NouroudineОценок пока нет
- Cours Meìcanique Des FluidesДокумент79 страницCours Meìcanique Des FluidesErrafiy OmarОценок пока нет
- Structure Moleculaire Et Morphologie DesДокумент29 страницStructure Moleculaire Et Morphologie DesHa NahОценок пока нет
- Exposé StoДокумент3 страницыExposé StoHa NahОценок пока нет
- Expo StockageДокумент2 страницыExpo StockageHa NahОценок пока нет
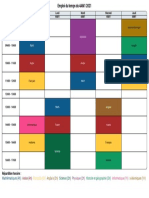
- Emploi Du Temps Du 4AM1 2021Документ1 страницаEmploi Du Temps Du 4AM1 2021Ha NahОценок пока нет
- Chapitre1 Transfert de MatiéreДокумент14 страницChapitre1 Transfert de MatiéreHa NahОценок пока нет
- Série DexerciceДокумент2 страницыSérie DexerciceHa NahОценок пока нет
- Chapitre II Pollution Des SolsДокумент16 страницChapitre II Pollution Des SolsHa NahОценок пока нет
- TC - Examen - Emd 5 6730Документ11 страницTC - Examen - Emd 5 6730Ha NahОценок пока нет
- 112180-Article Text-311073-1-10-20150129Документ9 страниц112180-Article Text-311073-1-10-20150129Ha NahОценок пока нет
- COURS-Spectroscopie IR-UVДокумент28 страницCOURS-Spectroscopie IR-UVHa NahОценок пока нет
- TC - TD - Transfert de Chaleur Par Rayonnement 6726Документ2 страницыTC - TD - Transfert de Chaleur Par Rayonnement 6726Ha NahОценок пока нет
- TC - TD - Transfert de Chaleur Par Rayonnement 6726Документ2 страницыTC - TD - Transfert de Chaleur Par Rayonnement 6726Ha NahОценок пока нет
- ET - Problemes Échangeur ThermiqueДокумент73 страницыET - Problemes Échangeur Thermiquemguisse100% (1)
- But Du TPДокумент3 страницыBut Du TPHa NahОценок пока нет
- TC - Examen - Emd 6 6733Документ12 страницTC - Examen - Emd 6 6733Ha NahОценок пока нет
- TC - Examen - Emd 2 6728Документ13 страницTC - Examen - Emd 2 6728Ha NahОценок пока нет
- TC - Examen - Emd 3 6729Документ13 страницTC - Examen - Emd 3 6729Ha NahОценок пока нет
- Cours Transfert de ChaleurДокумент32 страницыCours Transfert de Chaleurslipknotmido1Оценок пока нет
- TC - Examen - Emd 2 6728Документ13 страницTC - Examen - Emd 2 6728Ha NahОценок пока нет
- 112180-Article Text-311073-1-10-20150129Документ9 страниц112180-Article Text-311073-1-10-20150129Ha NahОценок пока нет
- L2S4 GdE TTT Partb PDFДокумент79 страницL2S4 GdE TTT Partb PDFMed OutaghjijteОценок пока нет
- Donnee Exos Chaleur MasseДокумент9 страницDonnee Exos Chaleur MasseMohamud LhafОценок пока нет
- 112180-Article Text-311073-1-10-20150129Документ9 страниц112180-Article Text-311073-1-10-20150129Ha NahОценок пока нет
- Chapitre III Dynamique Des Fluides Incompressibles RéelsДокумент9 страницChapitre III Dynamique Des Fluides Incompressibles RéelsHa NahОценок пока нет
- Chapitre II DYNAMIQUE DES FLUIDES INCOMPRESSIBLES PARFAITS - 3GPДокумент8 страницChapitre II DYNAMIQUE DES FLUIDES INCOMPRESSIBLES PARFAITS - 3GPHa NahОценок пока нет
- Rapport Metaux Thetford FINALДокумент48 страницRapport Metaux Thetford FINALHa NahОценок пока нет
- Rapport Metaux Thetford FINALДокумент48 страницRapport Metaux Thetford FINALHa NahОценок пока нет
- 3 Dangers-Des-Metaux SPC SVT Maths Techno EleveДокумент3 страницы3 Dangers-Des-Metaux SPC SVT Maths Techno EleveCucuОценок пока нет
- Chapitre III Dynamique Des Fluides Incompressibles RéelsДокумент9 страницChapitre III Dynamique Des Fluides Incompressibles RéelsHa NahОценок пока нет
- Chapitre 4ABC1Документ5 страницChapitre 4ABC1William Yves YanogoОценок пока нет
- La MétacognitionДокумент14 страницLa Métacognitionamiral proОценок пока нет
- COA88 Cle2c4226Документ62 страницыCOA88 Cle2c4226Khamassi AmerОценок пока нет
- Affiliation 150 A 1000Документ20 страницAffiliation 150 A 1000Rabah BenbellilОценок пока нет
- TP 4 - Variateur de VitesseДокумент8 страницTP 4 - Variateur de VitesseLayla AgamanОценок пока нет
- Syllabus Sylviculture Et Agroforesterie - UCG - ButemboДокумент62 страницыSyllabus Sylviculture Et Agroforesterie - UCG - ButemboMuyisa Kambale100% (7)
- PcastucesДокумент92 страницыPcastucesMyandriamaholyzi RazakatianaОценок пока нет
- Chapitre 3Документ40 страницChapitre 3othman azОценок пока нет
- 160908Документ2 страницы160908FAVREОценок пока нет
- STEG - PDF Version 1Документ19 страницSTEG - PDF Version 1barragan150691Оценок пока нет
- Epreuve E2 Bac Pro SN Juin 2022 Risc Elements de CorrectionДокумент22 страницыEpreuve E2 Bac Pro SN Juin 2022 Risc Elements de CorrectionerwanОценок пока нет
- Le Guide de La Maçonnerie - Ciment CalciaДокумент112 страницLe Guide de La Maçonnerie - Ciment CalciaAEMa CCCОценок пока нет
- TP 3 ThermoДокумент8 страницTP 3 ThermokikoОценок пока нет
- Un Lève-PlaqueДокумент8 страницUn Lève-Plaquetayeb FittОценок пока нет
- Sdic PL0277Документ38 страницSdic PL0277Asmae illoussamenОценок пока нет
- 28.10 Traitement de La Prononciation en LangueДокумент25 страниц28.10 Traitement de La Prononciation en LangueOlga PermyakovaОценок пока нет
- ConnectivismeДокумент4 страницыConnectivismeAllioui WalidОценок пока нет
- Serie Resonnance D'intensite AapcДокумент2 страницыSerie Resonnance D'intensite Aapcacademie archimedeОценок пока нет
- FACES John Cassavetes ScriptДокумент101 страницаFACES John Cassavetes ScriptManuel GarcíaОценок пока нет
- Jean Paul II Et La V MarieДокумент4 страницыJean Paul II Et La V MarieEmmanuel BakunguОценок пока нет
- Fiches de Synthèse Des ExpositionsДокумент117 страницFiches de Synthèse Des ExpositionsMaster Métiers et arts de l'expositionОценок пока нет
- DTU 31.1 P1 - Charpente BoisДокумент24 страницыDTU 31.1 P1 - Charpente BoisDinh Anh Quan100% (6)
- Des Problèmes Sans NombresДокумент22 страницыDes Problèmes Sans NombresJean-Philippe Solanet-Moulin100% (9)
- 28654b Manuel D'emploi - FraДокумент36 страниц28654b Manuel D'emploi - FraPakkeong MarineОценок пока нет
- 1 Agent-Socio-éducatif - TДокумент2 страницы1 Agent-Socio-éducatif - TProf HassanОценок пока нет
- Etude D'un Batiment R+8+S-sol PDFДокумент226 страницEtude D'un Batiment R+8+S-sol PDFرسوم متحركة ماشا والدبОценок пока нет
- Prisonniers Du Temps - CrichtonДокумент539 страницPrisonniers Du Temps - CrichtonMelanie VincentОценок пока нет
- Pilotage PerformanceДокумент31 страницаPilotage PerformanceMarc BoldsОценок пока нет
- TD Cristaux LiquidesДокумент4 страницыTD Cristaux LiquidesHabjia AbdeljalilОценок пока нет
- Le livre de la mémoire libérée : Apprenez plus vite, retenez tout avec des techniques de mémorisation simples et puissantesОт EverandLe livre de la mémoire libérée : Apprenez plus vite, retenez tout avec des techniques de mémorisation simples et puissantesРейтинг: 4 из 5 звезд4/5 (6)
- Harmonisation Energétique des Personnes: Manuel de Curothérapie 2020От EverandHarmonisation Energétique des Personnes: Manuel de Curothérapie 2020Рейтинг: 4 из 5 звезд4/5 (8)
- Améliorer votre mémoire: Un Guide pour l'augmentation de la puissance du cerveau, utilisant des techniques et méthodesОт EverandAméliorer votre mémoire: Un Guide pour l'augmentation de la puissance du cerveau, utilisant des techniques et méthodesРейтинг: 5 из 5 звезд5/5 (2)
- Neuropsychologie: Les bases théoriques et pratiques du domaine d'étude (psychologie pour tous)От EverandNeuropsychologie: Les bases théoriques et pratiques du domaine d'étude (psychologie pour tous)Оценок пока нет
- Comment développer l’autodiscipline: Résiste aux tentations et atteins tes objectifs à long termeОт EverandComment développer l’autodiscipline: Résiste aux tentations et atteins tes objectifs à long termeРейтинг: 4.5 из 5 звезд4.5/5 (7)
- Aimez-Vous en 12 Étapes Pratiques: Un Manuel pour Améliorer l'Estime de Soi, Prendre Conscience de sa Valeur, se Débarrasser du Doute et Trouver un Bonheur VéritableОт EverandAimez-Vous en 12 Étapes Pratiques: Un Manuel pour Améliorer l'Estime de Soi, Prendre Conscience de sa Valeur, se Débarrasser du Doute et Trouver un Bonheur VéritableРейтинг: 5 из 5 звезд5/5 (4)
- Harmonisation Energétique des Lieux: Habitat et haut-lieux sacrés 2020От EverandHarmonisation Energétique des Lieux: Habitat et haut-lieux sacrés 2020Рейтинг: 2.5 из 5 звезд2.5/5 (3)
- Hypnotisme et Magnétisme, Somnambulisme, Suggestion et Télépathie, Influence personnelle: Cours Pratique completОт EverandHypnotisme et Magnétisme, Somnambulisme, Suggestion et Télépathie, Influence personnelle: Cours Pratique completРейтинг: 4.5 из 5 звезд4.5/5 (8)
- Anatomie & 100 étirements essentiels: Techniques, Bénéfices attendus, Précautions à prendre, Conseils, Tableaux de séries, DouleursОт EverandAnatomie & 100 étirements essentiels: Techniques, Bénéfices attendus, Précautions à prendre, Conseils, Tableaux de séries, DouleursОценок пока нет
- Force Mentale et Maîtrise de la Discipline: Renforcez votre Confiance en vous pour Débloquer votre Courage et votre Résilience ! (Comprend un Manuel Pratique en 10 Étapes et 15 Puissants Exercices)От EverandForce Mentale et Maîtrise de la Discipline: Renforcez votre Confiance en vous pour Débloquer votre Courage et votre Résilience ! (Comprend un Manuel Pratique en 10 Étapes et 15 Puissants Exercices)Рейтинг: 4.5 из 5 звезд4.5/5 (28)
- Secrets ancestraux d'un maître guérisseur: Un sceptique occidental, un maître oriental et les plus grands secrets de la vieОт EverandSecrets ancestraux d'un maître guérisseur: Un sceptique occidental, un maître oriental et les plus grands secrets de la vieРейтинг: 5 из 5 звезд5/5 (2)
- Géobiologie de l'habitat et Géobiologie sacrée: Pour un lieu sainОт EverandGéobiologie de l'habitat et Géobiologie sacrée: Pour un lieu sainРейтинг: 4.5 из 5 звезд4.5/5 (2)
- Technologie automobile: Les Grands Articles d'UniversalisОт EverandTechnologie automobile: Les Grands Articles d'UniversalisОценок пока нет
- La vie des abeilles: Prix Nobel de littératureОт EverandLa vie des abeilles: Prix Nobel de littératureРейтинг: 4 из 5 звезд4/5 (41)
- L'Art de la guerre: Traité de stratégie en 13 chapitres (texte intégral)От EverandL'Art de la guerre: Traité de stratégie en 13 chapitres (texte intégral)Рейтинг: 4 из 5 звезд4/5 (3032)
- La Pensée Positive en 30 Jours: Manuel Pratique pour Penser Positivement, Former votre Critique Intérieur, Arrêter la Réflexion Excessive et Changer votre État d'Esprit: Devenir une Personne Consciente et PositiveОт EverandLa Pensée Positive en 30 Jours: Manuel Pratique pour Penser Positivement, Former votre Critique Intérieur, Arrêter la Réflexion Excessive et Changer votre État d'Esprit: Devenir une Personne Consciente et PositiveРейтинг: 4.5 из 5 звезд4.5/5 (12)
- Le B.A.-Ba de la communication: Comment convaincre, informer, séduire ?От EverandLe B.A.-Ba de la communication: Comment convaincre, informer, séduire ?Рейтинг: 3 из 5 звезд3/5 (1)
- Électrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsОт EverandÉlectrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsРейтинг: 5 из 5 звезд5/5 (1)
- Histoire de la psychologie scientifique: De la naissance de la psychologie à la neuropsychologie et aux champs d'application les plus actuelsОт EverandHistoire de la psychologie scientifique: De la naissance de la psychologie à la neuropsychologie et aux champs d'application les plus actuelsОценок пока нет
- Magnétisme Personnel ou Psychique: Éducation de la Pensée, développement de la Volonté, pour être Heureux, Fort, Bien Portant et réussir en tout.От EverandMagnétisme Personnel ou Psychique: Éducation de la Pensée, développement de la Volonté, pour être Heureux, Fort, Bien Portant et réussir en tout.Рейтинг: 5 из 5 звезд5/5 (1)
- Le TDA/H chez l'adulte: Apprendre à vivre sereinement avec son trouble de l'attentionОт EverandLe TDA/H chez l'adulte: Apprendre à vivre sereinement avec son trouble de l'attentionОценок пока нет
- Réfléchissez et devenez riche: Le grand livre de l’esprit maîtreОт EverandRéfléchissez et devenez riche: Le grand livre de l’esprit maîtreРейтинг: 4 из 5 звезд4/5 (509)