Вам также может понравиться
- Lecture 6 2nd Order System Time ResponseДокумент81 страницаLecture 6 2nd Order System Time ResponseFahad ChaudharyОценок пока нет
- Active Disturbance Rejection Control for Nonlinear Systems: An IntroductionОт EverandActive Disturbance Rejection Control for Nonlinear Systems: An IntroductionОценок пока нет
- Feed Forward ControlДокумент19 страницFeed Forward Controlsujithadharani9813Оценок пока нет
- CMOS Integrated Circuits For Millimeter-Wave Applications Millimeter-Wave ApplicationsДокумент45 страницCMOS Integrated Circuits For Millimeter-Wave Applications Millimeter-Wave ApplicationswalkmemberОценок пока нет
- VLSI - Carry Lookahead AdderДокумент12 страницVLSI - Carry Lookahead AdderK.R.RaguramОценок пока нет
- PID ControlДокумент56 страницPID ControlSyafRizal100% (1)
- Communication Hand Note For EEE Job PreparationДокумент173 страницыCommunication Hand Note For EEE Job PreparationTime to ShareОценок пока нет
- Industrial Instrumentation 05EE 62XXДокумент56 страницIndustrial Instrumentation 05EE 62XXwhiteelephant93Оценок пока нет
- Communication Lecture PDFДокумент179 страницCommunication Lecture PDFMasum BillahОценок пока нет
- Digital Filter MatlabДокумент37 страницDigital Filter MatlabYahya Muhammad AdamОценок пока нет
- CISE 316 Control Systems Design Lab ManualДокумент78 страницCISE 316 Control Systems Design Lab Manualnirmal_inbox100% (1)
- Introduction To Control SystemsДокумент28 страницIntroduction To Control SystemsAK MizanОценок пока нет
- Double Beam UV-VIS Spectrophotometer AU 2701Документ2 страницыDouble Beam UV-VIS Spectrophotometer AU 2701bhagavathamОценок пока нет
- Chapter 2 - Discrete-State Control Part IДокумент37 страницChapter 2 - Discrete-State Control Part IVon JinОценок пока нет
- Fuzzy Gain Scheduling of PID Controllers PDFДокумент7 страницFuzzy Gain Scheduling of PID Controllers PDFMiguel ZeaОценок пока нет
- PID ControllerДокумент22 страницыPID ControllerFoo He XuanОценок пока нет
- PLC Signal ConditioningДокумент8 страницPLC Signal ConditioningJyotiska DeОценок пока нет
- Lecture 12-13 Time Domain Analysis of 1st Order SystemsДокумент56 страницLecture 12-13 Time Domain Analysis of 1st Order SystemsKemal ZhafОценок пока нет
- EI6702-Logic and Distributed Control System PDFДокумент15 страницEI6702-Logic and Distributed Control System PDFlionelprakzy100% (1)
- Week4 PDFДокумент56 страницWeek4 PDFhelen100% (1)
- 180ies - 1-Communication Systems PDFДокумент110 страниц180ies - 1-Communication Systems PDFDlishaОценок пока нет
- Frequency Response For Control System Analysis - GATE Study Material in PDFДокумент8 страницFrequency Response For Control System Analysis - GATE Study Material in PDFnidhi tripathiОценок пока нет
- Root LocusДокумент95 страницRoot LocusPiyooshTripathi100% (1)
- Eee.60-62Документ3 страницыEee.60-62skrtamilОценок пока нет
- CS Lecture Notes Units 1 2 3Документ88 страницCS Lecture Notes Units 1 2 3sushinkОценок пока нет
- Operational AmplifierДокумент130 страницOperational Amplifierrs lagrimasОценок пока нет
- Buckbee Process Control Basics FREE Chapter5Документ29 страницBuckbee Process Control Basics FREE Chapter5Göktug AhunbayОценок пока нет
- 8 Timers PIC18F46k22Документ6 страниц8 Timers PIC18F46k22theaОценок пока нет
- Gujarat Technological University: Page 1 of 5Документ5 страницGujarat Technological University: Page 1 of 5Brijesh B Naik100% (1)
- Intensity ModulationДокумент3 страницыIntensity Modulationanon-323096100% (1)
- QUESTION BANK of Control Systems Engineering PDFДокумент12 страницQUESTION BANK of Control Systems Engineering PDFMouhanit LimbachiyaОценок пока нет
- Chap 3 Z TransformДокумент93 страницыChap 3 Z TransformJames Jone100% (1)
- PID Controller For DC MotorДокумент6 страницPID Controller For DC MotorjayaseelanОценок пока нет
- Study of Wireless Power Transfer SynopsisДокумент9 страницStudy of Wireless Power Transfer SynopsisAnkitha G NayakaОценок пока нет
- Chapter1 Introduction To Control SystemДокумент30 страницChapter1 Introduction To Control SystemAijaz AhmedОценок пока нет
- MATLAB - Modelling in Time Domain - Norman NiseДокумент3 страницыMATLAB - Modelling in Time Domain - Norman Niseichigo325Оценок пока нет
- Powerflex 525 Adjustable Frequency Ac DriveДокумент5 страницPowerflex 525 Adjustable Frequency Ac DriveJaime RamosОценок пока нет
- rr320803 Process Dynamics and ControlДокумент6 страницrr320803 Process Dynamics and ControlSRINIVASA RAO GANTAОценок пока нет
- Lab Manual - TheoryДокумент49 страницLab Manual - TheoryLovely VinayОценок пока нет
- Digital Principle and System DesignДокумент26 страницDigital Principle and System Designainugiri100% (4)
- Control Systems KuestionДокумент39 страницControl Systems KuestionRose KayoОценок пока нет
- A Study of H Infinity and H2 Synthesis For Active Vibration ControlДокумент6 страницA Study of H Infinity and H2 Synthesis For Active Vibration ControlSina Kuseyri100% (1)
- Lecture Plan Signals and SystemsДокумент3 страницыLecture Plan Signals and SystemsMarimuthu KaveriОценок пока нет
- CS 2255 Control Systems Question BankДокумент62 страницыCS 2255 Control Systems Question BankreporterrajiniОценок пока нет
- Successive OverДокумент5 страницSuccessive OverYohannesОценок пока нет
- CIRCUIT Analysis QB 20 21Документ44 страницыCIRCUIT Analysis QB 20 216112 Shanmuga priyanОценок пока нет
- Control Systems - Controllability and ObservabilityДокумент5 страницControl Systems - Controllability and ObservabilityCorey YoungОценок пока нет
- Two Marks Questions and AnswersДокумент5 страницTwo Marks Questions and Answerssudhasesh2000Оценок пока нет
- Topic 8 PLCДокумент26 страницTopic 8 PLCKrista JacksonОценок пока нет
- 01.anatomy of A Feedback Control SystemДокумент8 страниц01.anatomy of A Feedback Control SystemMahesh GonuguntlaОценок пока нет
- ECE18R202Документ2 страницыECE18R202Jeya Prakash K0% (1)
- Experiment 3 - Alarm Circuit Using Logic GatesДокумент4 страницыExperiment 3 - Alarm Circuit Using Logic GatesPrr PrrОценок пока нет
- Control System Question BankДокумент3 страницыControl System Question Bankmanish_iitrОценок пока нет
- Lecture 1Документ39 страницLecture 1kasunweera100% (1)
- Unit - 4 - Power Electronics and Energy Storage in Smart GridДокумент50 страницUnit - 4 - Power Electronics and Energy Storage in Smart GridsujithОценок пока нет
- Transportation LagДокумент10 страницTransportation LagImran Unar100% (1)
- 2SK 2371 - 2372 - NecДокумент8 страниц2SK 2371 - 2372 - NecStevenОценок пока нет
- All Tyeps Risk Assessment in Construction PDFДокумент112 страницAll Tyeps Risk Assessment in Construction PDFSorin Tec100% (1)
- Kelani Cable - ArmouredДокумент1 страницаKelani Cable - Armouredsukiraj Rasalingam50% (2)
- 01 - Doc and Drawing Register - MOGS-Botling Plant Dtd. 04.1.12Документ6 страниц01 - Doc and Drawing Register - MOGS-Botling Plant Dtd. 04.1.12SaraswatapalitОценок пока нет
- Skima Markah Akhir 2015Документ8 страницSkima Markah Akhir 2015Mohd Karafi Md SallehОценок пока нет
- Material Specification Special Alloys and CopperДокумент6 страницMaterial Specification Special Alloys and CopperOscar SchmüthОценок пока нет
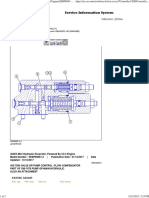
- Product: Mini Hyd Excavator Model: 304E2 MINI HYD EXCAVATOR ME402271 Configuration: 304E2 Mini Hydraulic Excavator ME400001-UP (MACHINE) POWERED BY C2.4 EngineДокумент2 страницыProduct: Mini Hyd Excavator Model: 304E2 MINI HYD EXCAVATOR ME402271 Configuration: 304E2 Mini Hydraulic Excavator ME400001-UP (MACHINE) POWERED BY C2.4 Engineevan100% (1)
- Manual V1000 Wiring AvigilonДокумент1 страницаManual V1000 Wiring AvigilonPrima VDОценок пока нет
- Gf868 Startup Guide Revf1Документ80 страницGf868 Startup Guide Revf1prihartono_diasОценок пока нет
- Ptfe PDFДокумент1 страницаPtfe PDFXiwen CloudОценок пока нет
- Injection Well ProblemsДокумент12 страницInjection Well Problemsdriller2250% (2)
- Probing The SkyДокумент344 страницыProbing The Skytriya20Оценок пока нет
- Liquid Penetrant Testing: Standard Practice ForДокумент11 страницLiquid Penetrant Testing: Standard Practice ForMandy NormanОценок пока нет
- Datasheet MeshGuard Accessories DS 1072-02-0Документ2 страницыDatasheet MeshGuard Accessories DS 1072-02-0Fatoni Gea AirlanggaОценок пока нет
- Td01005006e PDFДокумент8 страницTd01005006e PDFCarlos AvilaОценок пока нет
- 1.1 GeneralДокумент29 страниц1.1 Generalmanideep reddyОценок пока нет
- Prince Hydraulics Wolverine Mono-Block Control Valve Offered by PRC Industrial SupplyДокумент2 страницыPrince Hydraulics Wolverine Mono-Block Control Valve Offered by PRC Industrial SupplyPRC Industrial SupplyОценок пока нет
- 2 1 Precast Concrete BridgeДокумент68 страниц2 1 Precast Concrete BridgeVipin Kumar ParasharОценок пока нет
- Cable & Wire Harness Assemblies?: Are You Involved inДокумент2 страницыCable & Wire Harness Assemblies?: Are You Involved inChung LeОценок пока нет
- AmeronДокумент355 страницAmeronJonas TedescoОценок пока нет
- Basic Pneumatic System ApplicationsДокумент33 страницыBasic Pneumatic System Applicationsnarkuys syukranОценок пока нет
- NanotechnologyДокумент26 страницNanotechnologySathish Kumar SОценок пока нет
- Water Content of Gases and Liquids Water Solubility in Liquid HydrocarbonsДокумент7 страницWater Content of Gases and Liquids Water Solubility in Liquid HydrocarbonsnguОценок пока нет
- Precast IFCДокумент42 страницыPrecast IFCar_raghvendra4151Оценок пока нет
- Standard Specifications For Road ConstructionДокумент223 страницыStandard Specifications For Road Constructionrkae100% (1)
- Cable Plano - Polipasto - 19016Документ4 страницыCable Plano - Polipasto - 19016javier perezОценок пока нет
- Tas HandbookДокумент121 страницаTas HandbookGema Putra PratamaОценок пока нет
- 08 G30 InfotainmentДокумент34 страницы08 G30 Infotainmentros56Оценок пока нет
- SR 50 H2O Ditech Carb 00-03Документ118 страницSR 50 H2O Ditech Carb 00-03Marjan Stojanov100% (1)
- The End of Craving: Recovering the Lost Wisdom of Eating WellОт EverandThe End of Craving: Recovering the Lost Wisdom of Eating WellРейтинг: 4.5 из 5 звезд4.5/5 (83)
- The Fabric of Civilization: How Textiles Made the WorldОт EverandThe Fabric of Civilization: How Textiles Made the WorldРейтинг: 4.5 из 5 звезд4.5/5 (58)
- The Future of Geography: How the Competition in Space Will Change Our WorldОт EverandThe Future of Geography: How the Competition in Space Will Change Our WorldРейтинг: 4 из 5 звезд4/5 (6)
- Hero Found: The Greatest POW Escape of the Vietnam WarОт EverandHero Found: The Greatest POW Escape of the Vietnam WarРейтинг: 4 из 5 звезд4/5 (19)
- Sully: The Untold Story Behind the Miracle on the HudsonОт EverandSully: The Untold Story Behind the Miracle on the HudsonРейтинг: 4 из 5 звезд4/5 (103)
- When the Heavens Went on Sale: The Misfits and Geniuses Racing to Put Space Within ReachОт EverandWhen the Heavens Went on Sale: The Misfits and Geniuses Racing to Put Space Within ReachРейтинг: 3.5 из 5 звезд3.5/5 (6)
- Faster: How a Jewish Driver, an American Heiress, and a Legendary Car Beat Hitler's BestОт EverandFaster: How a Jewish Driver, an American Heiress, and a Legendary Car Beat Hitler's BestРейтинг: 4 из 5 звезд4/5 (28)
- How to Build a Car: The Autobiography of the World’s Greatest Formula 1 DesignerОт EverandHow to Build a Car: The Autobiography of the World’s Greatest Formula 1 DesignerРейтинг: 4.5 из 5 звезд4.5/5 (54)
- Dirt to Soil: One Family’s Journey into Regenerative AgricultureОт EverandDirt to Soil: One Family’s Journey into Regenerative AgricultureРейтинг: 5 из 5 звезд5/5 (125)
- The Intel Trinity: How Robert Noyce, Gordon Moore, and Andy Grove Built the World's Most Important CompanyОт EverandThe Intel Trinity: How Robert Noyce, Gordon Moore, and Andy Grove Built the World's Most Important CompanyОценок пока нет
- Pale Blue Dot: A Vision of the Human Future in SpaceОт EverandPale Blue Dot: A Vision of the Human Future in SpaceРейтинг: 4.5 из 5 звезд4.5/5 (588)
- The Beekeeper's Lament: How One Man and Half a Billion Honey Bees Help Feed AmericaОт EverandThe Beekeeper's Lament: How One Man and Half a Billion Honey Bees Help Feed AmericaОценок пока нет
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindОт EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindОценок пока нет
- Four Battlegrounds: Power in the Age of Artificial IntelligenceОт EverandFour Battlegrounds: Power in the Age of Artificial IntelligenceРейтинг: 5 из 5 звезд5/5 (5)
- Permaculture for the Rest of Us: Abundant Living on Less than an AcreОт EverandPermaculture for the Rest of Us: Abundant Living on Less than an AcreРейтинг: 4.5 из 5 звезд4.5/5 (33)
- Process Plant Equipment: Operation, Control, and ReliabilityОт EverandProcess Plant Equipment: Operation, Control, and ReliabilityРейтинг: 5 из 5 звезд5/5 (1)
- The Technology Trap: Capital, Labor, and Power in the Age of AutomationОт EverandThe Technology Trap: Capital, Labor, and Power in the Age of AutomationРейтинг: 4.5 из 5 звезд4.5/5 (46)
- This Is What It Sounds Like: What the Music You Love Says About YouОт EverandThis Is What It Sounds Like: What the Music You Love Says About YouРейтинг: 4 из 5 звезд4/5 (33)
- Fallout: The Hiroshima Cover-up and the Reporter Who Revealed It to the WorldОт EverandFallout: The Hiroshima Cover-up and the Reporter Who Revealed It to the WorldРейтинг: 4.5 из 5 звезд4.5/5 (82)
- From Darwin to Derrida: Selfish Genes, Social Selves, and the Meanings of LifeОт EverandFrom Darwin to Derrida: Selfish Genes, Social Selves, and the Meanings of LifeРейтинг: 4 из 5 звезд4/5 (2)