Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Supplier Run Rate CalculatorДокумент9 страницSupplier Run Rate CalculatordcevipinОценок пока нет
- Hexadecimal To DecimalДокумент7 страницHexadecimal To DecimalMushfik ArafatОценок пока нет
- Physics I Problems PDFДокумент1 страницаPhysics I Problems PDFbosschellenОценок пока нет
- E4-E5 CM (3G Operational Issues)Документ42 страницыE4-E5 CM (3G Operational Issues)VIKAS NIGAMОценок пока нет
- Tay Township User Fees and Service Charges BylawДокумент27 страницTay Township User Fees and Service Charges BylawMidland_MirrorОценок пока нет
- lm230wf1 Tla6Документ32 страницыlm230wf1 Tla6Charlie SierraОценок пока нет
- 92 - Summary of Items Discussed in 4 - 2021 ADF On 13.8.2021Документ20 страниц92 - Summary of Items Discussed in 4 - 2021 ADF On 13.8.2021trickyggОценок пока нет
- Quest CCS ProjectДокумент10 страницQuest CCS ProjecttruehemingwayОценок пока нет
- ReadmeДокумент9 страницReadmewatzzupОценок пока нет
- Synopsis of Power FactorДокумент10 страницSynopsis of Power FactorRavi TiwariОценок пока нет
- Potsdam Village Police Dept. Blotter April 12, 2018Документ2 страницыPotsdam Village Police Dept. Blotter April 12, 2018NewzjunkyОценок пока нет
- How To Draw and Read Line Diagrams Onboard Ships?: ShareДокумент9 страницHow To Draw and Read Line Diagrams Onboard Ships?: ShareShaif uddin rifatОценок пока нет
- AA Holtz & Kovacs - An Introduction To Geotechnical Engineering PDFДокумент746 страницAA Holtz & Kovacs - An Introduction To Geotechnical Engineering PDFPeterОценок пока нет
- Riso Rp310 Panel MessagesДокумент44 страницыRiso Rp310 Panel MessagesKhin Zaw50% (2)
- Guide To Using In-Situ Tensile Pull-Off Tests To Evaluate Bond of Concrete Surface MaterialsДокумент12 страницGuide To Using In-Situ Tensile Pull-Off Tests To Evaluate Bond of Concrete Surface MaterialsMauricio Javier León TejadaОценок пока нет
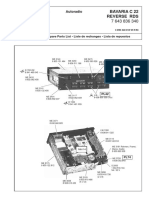
- Bavaria Reverse RdsДокумент15 страницBavaria Reverse RdsDušan JovanovićОценок пока нет
- Babies of 2010Документ16 страницBabies of 2010Sierra Nevada Media GroupОценок пока нет
- V7.0 Function ListДокумент48 страницV7.0 Function ListInyectronix VyhОценок пока нет
- CV Mayank Shekhar Dwivedi IITBДокумент4 страницыCV Mayank Shekhar Dwivedi IITBGoutam GiriОценок пока нет
- Astm D3212.380331 1Документ3 страницыAstm D3212.380331 1anish_am2005Оценок пока нет
- 496 - SSP481 - Audi A7 Onboard Power Supply and Networking PDFДокумент40 страниц496 - SSP481 - Audi A7 Onboard Power Supply and Networking PDFbenjaminhuku100% (5)
- Catalog C60H-DCДокумент6 страницCatalog C60H-DCNae MocioiОценок пока нет
- Upload Photosimages Into Custom Table & Print in Adobe FormДокумент14 страницUpload Photosimages Into Custom Table & Print in Adobe FormEmilSОценок пока нет
- Eee25 2018syllabusДокумент4 страницыEee25 2018syllabusEmman Joshua BustoОценок пока нет
- Physics 02-07 Centripetal Force and Banked CurvesДокумент2 страницыPhysics 02-07 Centripetal Force and Banked CurveslatteОценок пока нет
- Spirex": Onepiece Spiral Flexible CouplingДокумент1 страницаSpirex": Onepiece Spiral Flexible CouplingHazim HazimОценок пока нет
- M2.2.9 Critical Review and Selection of NDT MethodsДокумент13 страницM2.2.9 Critical Review and Selection of NDT MethodsAldy Bagus PratamaОценок пока нет
- AMICO InstallationManual PDFДокумент60 страницAMICO InstallationManual PDFfernandoОценок пока нет
- Roland Sands Design US CatalogДокумент56 страницRoland Sands Design US Catalogsema2210Оценок пока нет
- Corrosion of Stainless SteelsДокумент5 страницCorrosion of Stainless Steelsparasite0167% (3)