Вам также может понравиться
- Comunicacion Oral y Escrita Semana 8Документ4 страницыComunicacion Oral y Escrita Semana 8alan naiz tobar pino100% (3)
- Caso Barilla Grupo 2Документ5 страницCaso Barilla Grupo 2Juan Augusto Sanchez Rios67% (3)
- Yaskawa l7 ManualДокумент41 страницаYaskawa l7 ManualRicardo BurgosОценок пока нет
- Listado de Homologacion 12 04 2019 PDFДокумент91 страницаListado de Homologacion 12 04 2019 PDFMichel Rosero100% (1)
- Calidad Total TQMДокумент40 страницCalidad Total TQMjoshan7Оценок пока нет
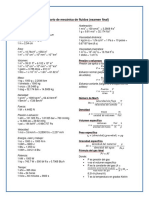
- Formulario Final de Mecanica de FluidosДокумент8 страницFormulario Final de Mecanica de FluidosWilder Vargas50% (2)
- Pead CorrugadoДокумент6 страницPead Corrugadomaush2009Оценок пока нет
- Equipos de HistologiaДокумент14 страницEquipos de HistologiaMedimeas100% (1)
- Protección Diferencial de Ata ImpedanciaДокумент2 страницыProtección Diferencial de Ata ImpedanciaschuberthjoseОценок пока нет
- DIURETICOSДокумент5 страницDIURETICOSIldaMercedesFriasGuerrero100% (1)
- La Calidad de Los Programas de Evaluación y de Los Instrumentos Que Lo IntegranДокумент8 страницLa Calidad de Los Programas de Evaluación y de Los Instrumentos Que Lo IntegranJorge Gonza0% (1)
- Compensación de La Energia Reactiva BT y MT PDFДокумент144 страницыCompensación de La Energia Reactiva BT y MT PDFAlfredo GilОценок пока нет
- Comunicación ÓpticaДокумент1 страницаComunicación ÓpticaschuberthjoseОценок пока нет
- Practica Diferencial ProteccionДокумент4 страницыPractica Diferencial ProteccionschuberthjoseОценок пока нет
- Calculo de Catenaria Linea TransДокумент4 страницыCalculo de Catenaria Linea TransschuberthjoseОценок пока нет
- EjemploДокумент2 страницыEjemploschuberthjoseОценок пока нет
- Ejempo de Resolucion de Problema Calculo Electromecanico LineaДокумент4 страницыEjempo de Resolucion de Problema Calculo Electromecanico LineaschuberthjoseОценок пока нет
- Corriente PararrayoДокумент1 страницаCorriente PararrayoschuberthjoseОценок пока нет
- Breaker Falla ProteccionДокумент2 страницыBreaker Falla ProteccionschuberthjoseОценок пока нет
- Basica Descripcion de Pruebas End To EndДокумент1 страницаBasica Descripcion de Pruebas End To EndschuberthjoseОценок пока нет
- Guia Basica para Prueba de Cables Según La IeeeДокумент1 страницаGuia Basica para Prueba de Cables Según La IeeeschuberthjoseОценок пока нет
- Aislamiento DefinicionesДокумент1 страницаAislamiento DefinicionesschuberthjoseОценок пока нет
- Lectura y ResumenДокумент1 страницаLectura y ResumenschuberthjoseОценок пока нет
- Proteccion de Transformadores BasicoДокумент6 страницProteccion de Transformadores BasicoschuberthjoseОценок пока нет
- Protocolo de Comunicación ResumenДокумент1 страницаProtocolo de Comunicación ResumenschuberthjoseОценок пока нет
- SobrevoltajesДокумент1 страницаSobrevoltajesschuberthjoseОценок пока нет
- Nociones Diseño Optimo Trafos 16-17Документ10 страницNociones Diseño Optimo Trafos 16-17schuberthjoseОценок пока нет
- Calculos de Proteccion de Distancia Con Falla A TierraДокумент13 страницCalculos de Proteccion de Distancia Con Falla A TierraschuberthjoseОценок пока нет
- Resumen Corrientes de InrushДокумент2 страницыResumen Corrientes de Inrushschuberthjose100% (1)
- Utilización de La Información en Sistemas de Control y ProtecciónДокумент1 страницаUtilización de La Información en Sistemas de Control y ProtecciónschuberthjoseОценок пока нет
- Cargabilidad de TrafosДокумент2 страницыCargabilidad de TrafosschuberthjoseОценок пока нет
- Resumen de PararrayosДокумент3 страницыResumen de PararrayosschuberthjoseОценок пока нет
- Proyecto Guia de Estilo de Bases de Datos en SistemasДокумент19 страницProyecto Guia de Estilo de Bases de Datos en SistemasschuberthjoseОценок пока нет
- Coordinación de Proteccion Direccional Sobre CorrienteДокумент19 страницCoordinación de Proteccion Direccional Sobre CorrienteschuberthjoseОценок пока нет
- Selección de Aislamiento para Altura Superior A 1000mДокумент8 страницSelección de Aislamiento para Altura Superior A 1000mschuberthjoseОценок пока нет
- Proyecto Guia de Estilo de Bases de Datos en SistemasДокумент15 страницProyecto Guia de Estilo de Bases de Datos en SistemasschuberthjoseОценок пока нет
- Capturas de Información de Conceptos de MicroeconomíaДокумент34 страницыCapturas de Información de Conceptos de MicroeconomíaschuberthjoseОценок пока нет
- Proteccion DiferencialДокумент2 страницыProteccion DiferencialschuberthjoseОценок пока нет
- Proyecto Guia de Estilo de Bases de Datos en SistemasДокумент19 страницProyecto Guia de Estilo de Bases de Datos en SistemasschuberthjoseОценок пока нет
- PROYECTOДокумент12 страницPROYECTOschuberthjoseОценок пока нет
- Mod3-Const Tecbas2022 AДокумент45 страницMod3-Const Tecbas2022 ASerena Fernández100% (1)
- E3. Reporte Técnico Mediante Herramientas IterativasДокумент6 страницE3. Reporte Técnico Mediante Herramientas IterativasJorge Garza OrtizОценок пока нет
- Tema Nro 4 Fc3b3rmulas Funcic3b3n Lc3b3gica Simple Referencia Rela1Документ3 страницыTema Nro 4 Fc3b3rmulas Funcic3b3n Lc3b3gica Simple Referencia Rela1Juan Andres Cardenas TuyaОценок пока нет
- Memoria de Calculo Agua PotableДокумент8 страницMemoria de Calculo Agua Potablechemo870% (1)
- Temario Del Curso de Formación de Instructores de Montacarga en MetepecДокумент3 страницыTemario Del Curso de Formación de Instructores de Montacarga en MetepecCesar Pascual TorresОценок пока нет
- Informe #4 I. Datos Informativos DE: Arias Vilca, Angélica MaríaДокумент5 страницInforme #4 I. Datos Informativos DE: Arias Vilca, Angélica Maríaapi-520847691Оценок пока нет
- Split Medidas PresiónДокумент13 страницSplit Medidas PresiónfmjovenelectronicОценок пока нет
- 70 Em.100 Instalaciones de Alto RiesgoДокумент12 страниц70 Em.100 Instalaciones de Alto RiesgoTino RuizОценок пока нет
- Multisoluciones E.I.R.L. Multiproductos & Soluciones E.I.R.LДокумент1 страницаMultisoluciones E.I.R.L. Multiproductos & Soluciones E.I.R.LLuis José Ruiz QuispeОценок пока нет
- Matriz DOFA - Qué Es y para Qué SirveДокумент5 страницMatriz DOFA - Qué Es y para Qué SirveNATHALIA ANDREA CARO CAICEDOОценок пока нет
- Control de Encendido y Apagado de Una Electroducha Según La Temperatura AmbienteДокумент4 страницыControl de Encendido y Apagado de Una Electroducha Según La Temperatura Ambientejuan perezОценок пока нет
- La Compañía Airbus Defence and Space Suministró ElДокумент1 страницаLa Compañía Airbus Defence and Space Suministró ElFredy Schneider Castro GutierrezОценок пока нет
- Guia Insumo Modelo de Mapa EstratégicoДокумент8 страницGuia Insumo Modelo de Mapa EstratégicoIsadely BarreraОценок пока нет
- Inversiones Vila Andreu S, AДокумент1 страницаInversiones Vila Andreu S, ANathanael JoyaОценок пока нет
- Como Insertar Música y Videos A Una DiapositivaДокумент3 страницыComo Insertar Música y Videos A Una DiapositivaGustavo Vilchez0% (1)
- Corrigenda Aea 92606Документ3 страницыCorrigenda Aea 92606Javier PasayoОценок пока нет
- PNL Aplicada A La Comunicacion PDFДокумент1 страницаPNL Aplicada A La Comunicacion PDFJuanОценок пока нет
- Encuesta Inicial (Respuestas)Документ7 страницEncuesta Inicial (Respuestas)Yanick SuárezОценок пока нет
- RESUMEN PrácticaДокумент2 страницыRESUMEN PrácticaManuel VОценок пока нет