Вам также может понравиться
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
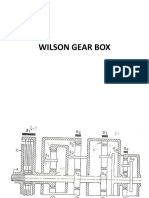
- Wilson Gear BoxДокумент20 страницWilson Gear Boxsonirocks100% (1)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Poly-Phase Hydro-Kineamtic Torque ConvertorДокумент8 страницPoly-Phase Hydro-Kineamtic Torque Convertorsonirocks100% (3)
- Matlab IndexДокумент2 страницыMatlab IndexsonirocksОценок пока нет
- Loops & Control ConstructsДокумент55 страницLoops & Control Constructssonirocks100% (1)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Case StudiesДокумент8 страницCase StudiessonirocksОценок пока нет
- Proe Mechanism Les4Документ13 страницProe Mechanism Les4inthemoney8Оценок пока нет
- Proe Mechanism Les5Документ11 страницProe Mechanism Les5inthemoney8Оценок пока нет
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Suspension Design by Ravi DeshmukhДокумент11 страницSuspension Design by Ravi DeshmukhsonirocksОценок пока нет
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Proe Mechanism Les1Документ8 страницProe Mechanism Les1sonirocksОценок пока нет
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Vehicle Dynamics - Thomas DДокумент38 страницVehicle Dynamics - Thomas DJasbir Singh Dhanoa100% (1)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Suspension Design Rajeev - MokashiДокумент16 страницSuspension Design Rajeev - MokashiJatin351100% (1)
- Catalogo AbbДокумент114 страницCatalogo AbbNia_s2Оценок пока нет
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Flamegard - Flame Retardant Low Smoke (FR-LSH) Industrial CablesДокумент1 страницаFlamegard - Flame Retardant Low Smoke (FR-LSH) Industrial CablescceОценок пока нет
- Em306a User ManualДокумент2 страницыEm306a User ManualNguyễnĐìnhDầnОценок пока нет
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- (Ron Lenk) Practical Design of Power SuppliesДокумент225 страниц(Ron Lenk) Practical Design of Power SuppliesQuỳnh Chi100% (6)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- BTA in CAPWAPДокумент2 страницыBTA in CAPWAPgauravgoel.cer3995Оценок пока нет
- Benchmarking of Electric and Hybrid Vehicle Electric Machines, Power Electronics, and BatteriesДокумент8 страницBenchmarking of Electric and Hybrid Vehicle Electric Machines, Power Electronics, and BatteriesMehdi Raza KhorasaniОценок пока нет
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- Practical Viva PhysicsДокумент4 страницыPractical Viva PhysicsPulkit JainОценок пока нет
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- S3 My WoW Live Hot Air Balloons Pupil WorksheetV2Документ5 страницS3 My WoW Live Hot Air Balloons Pupil WorksheetV2Dennis Gabriel WuОценок пока нет
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Lecture 24: T-Junction and Resistive Power DividersДокумент10 страницLecture 24: T-Junction and Resistive Power DividersWaleed SethiОценок пока нет
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- IEEE VTS TPSSC Meeting Agenda October 23 24 2019 NORTA New OrleansДокумент1 страницаIEEE VTS TPSSC Meeting Agenda October 23 24 2019 NORTA New OrleansJorge GuerreroОценок пока нет
- Module 3Документ73 страницыModule 3Mahesh Shalinda MendisОценок пока нет
- AcknowledgmentДокумент16 страницAcknowledgmentPratham JaiswalОценок пока нет
- Singh B 1960 PHD ThesisДокумент285 страницSingh B 1960 PHD ThesisMarcoTacoОценок пока нет
- TVH BulbsДокумент24 страницыTVH BulbsMelwyn FernandesОценок пока нет
- Cambridge International AS & A Level: Mathematics 9709/42Документ12 страницCambridge International AS & A Level: Mathematics 9709/42zaki.mariam19Оценок пока нет
- Hidraulika - Mashuri - Pertemuan 11Документ74 страницыHidraulika - Mashuri - Pertemuan 11EllaОценок пока нет
- Physics Project File For Class 12th.Документ16 страницPhysics Project File For Class 12th.neovaibhav62% (82)
- Applications Negative Feedback Ticular Reference: Some With Par-LaboratoryДокумент7 страницApplications Negative Feedback Ticular Reference: Some With Par-LaboratoryAnonymous VfH06fQXbAОценок пока нет
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Vaan de Graaf GeneratorДокумент16 страницVaan de Graaf GeneratorImran_firdousiОценок пока нет
- P1 Chapter 1Документ1 страницаP1 Chapter 1Rehan ShahОценок пока нет
- Saftronics DF8 PLUS ManualДокумент19 страницSaftronics DF8 PLUS ManualMr.K chОценок пока нет
- As H 12 QuantumphenomenaДокумент39 страницAs H 12 QuantumphenomenaHany ElGezawyОценок пока нет
- PHYSICS MechanicsДокумент329 страницPHYSICS MechanicsPeng GengОценок пока нет
- Magnetic AcousticДокумент8 страницMagnetic AcousticPavan SandeepОценок пока нет
- Practical Approach in Designing Conducted EMI Filter To Mitigate Common Mode and Differential Mode Noises in SmpsДокумент20 страницPractical Approach in Designing Conducted EMI Filter To Mitigate Common Mode and Differential Mode Noises in Smpsbacuoc.nguyen356Оценок пока нет
- LG lv280 v180 (ET)Документ108 страницLG lv280 v180 (ET)Toni Martin SebéОценок пока нет
- Basic Electronic Components (Post 1st Year Training ECE)Документ23 страницыBasic Electronic Components (Post 1st Year Training ECE)Cutie100% (4)
- Edexcel International GCSE Physics Student 39 S BookДокумент307 страницEdexcel International GCSE Physics Student 39 S Bookeltytan75% (4)
- 68PCCMINUTESДокумент110 страниц68PCCMINUTESSanjoy PanditОценок пока нет
- Topic 3 Electric Charge: 1. Electric Charge Read The Passage and Answer The Questions!Документ6 страницTopic 3 Electric Charge: 1. Electric Charge Read The Passage and Answer The Questions!FarhnsОценок пока нет