Вам также может понравиться
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Acura RSX Linked Edition 02 06 Shop ManualДокумент20 страницAcura RSX Linked Edition 02 06 Shop Manualoctavia100% (52)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Cleaning and Vacuum Test of Refrigerant PipesДокумент8 страницCleaning and Vacuum Test of Refrigerant PipesachusanachuОценок пока нет
- How To Start Building With CobДокумент16 страницHow To Start Building With CobRoy Huntley100% (3)
- Crystal StructuresДокумент54 страницыCrystal StructuresyashvantОценок пока нет
- L11-Leak Off Test, Kick Tolerance & Kick Circulation MethodsДокумент45 страницL11-Leak Off Test, Kick Tolerance & Kick Circulation MethodsLaxmi Kant PrasadОценок пока нет
- 1L11545A E 3 ManipulatorДокумент130 страниц1L11545A E 3 ManipulatorFerenc BalazsОценок пока нет
- CHAPTER 8 Hazop StudyДокумент7 страницCHAPTER 8 Hazop StudyNethiyaa50% (2)
- Partner Colibri II O2010 Euenapen 545196762Документ13 страницPartner Colibri II O2010 Euenapen 545196762Popescu OvidiuОценок пока нет
- 825P A Rele E3000Документ4 страницы825P A Rele E3000asssasas100% (1)
- K SedimentationДокумент13 страницK SedimentationKitty VОценок пока нет
- Nachi Special SteelsДокумент20 страницNachi Special SteelsBambang MulyantoОценок пока нет
- Electrical Resume Boyet PascuaДокумент2 страницыElectrical Resume Boyet PascuaAucsap BoyetОценок пока нет
- User Manual For Soniclean Digital Benchtop Ultrasonic Cleaners 191013 PDFДокумент12 страницUser Manual For Soniclean Digital Benchtop Ultrasonic Cleaners 191013 PDFRafael GonzalezОценок пока нет
- HeiДокумент1 страницаHeiJose Nelson Moreno BОценок пока нет
- Street Quality Identification Device (SQUID)Документ6 страницStreet Quality Identification Device (SQUID)viviolaОценок пока нет
- Assessment of Rotational Capacity Test Procedure FINALДокумент21 страницаAssessment of Rotational Capacity Test Procedure FINALzaheerahmed77Оценок пока нет
- DJJ10022 Report (Sir Amri)Документ6 страницDJJ10022 Report (Sir Amri)Muhd Imran Kasyidi OmarОценок пока нет
- Gavin Andresen CIATalkДокумент31 страницаGavin Andresen CIATalkopenid_iFFemYqNОценок пока нет
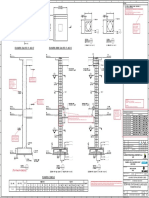
- 327101-BJ81-C-RCC-0007 Rev.00 - Client MarkupДокумент1 страница327101-BJ81-C-RCC-0007 Rev.00 - Client MarkupGokulprabhuОценок пока нет
- Trebuchet Coursework For Website PDFДокумент75 страницTrebuchet Coursework For Website PDFkeraizОценок пока нет
- Lorentz Ps4000 Manual enДокумент9 страницLorentz Ps4000 Manual encorazto100% (1)
- Rac MCQДокумент10 страницRac MCQnimish lambatОценок пока нет
- BioStrength ServiceExcite Loader Manual - 8.0Документ10 страницBioStrength ServiceExcite Loader Manual - 8.0powerliftermiloОценок пока нет
- VW-Audi Airbag Reset Tool User ManualДокумент14 страницVW-Audi Airbag Reset Tool User ManualgermantronikОценок пока нет
- Masterfill 300Документ2 страницыMasterfill 300Anonymous DVtgSEpMVОценок пока нет
- ELEG 270 Electronics: Dr. Ali BostaniДокумент25 страницELEG 270 Electronics: Dr. Ali BostanigigiОценок пока нет
- BITP3423 - Special Topic in Software Engineering: IT Architects PerspectiveДокумент17 страницBITP3423 - Special Topic in Software Engineering: IT Architects PerspectiveDee MohdОценок пока нет
- Astm D 3241 - 02 - RdmyndetmdjbДокумент13 страницAstm D 3241 - 02 - RdmyndetmdjbSamuel EduardoОценок пока нет
- 11460145-PIB Rev. 01-重型散热器升级包Документ5 страниц11460145-PIB Rev. 01-重型散热器升级包xlzyydf2015Оценок пока нет
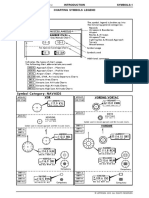
- Jeppesen Charts LegendsДокумент34 страницыJeppesen Charts LegendsFatih OguzОценок пока нет