Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Marine Structures (Journal, Magazine, 1999) (WorldCatДокумент2 страницыMarine Structures (Journal, Magazine, 1999) (WorldCatKimHockОценок пока нет
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- NACA Mean Line A08Документ1 страницаNACA Mean Line A08KimHockОценок пока нет
- 1 Model Testing: 1.1 DragДокумент14 страниц1 Model Testing: 1.1 DragPaul CLoonОценок пока нет
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Wave 1Документ5 страницWave 1KimHockОценок пока нет
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Pac AntaresДокумент4 страницыPac AntaresKimHockОценок пока нет
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- RHQ-IOCL-CPMSL-2020 Rev.0 Master Supplier ListДокумент224 страницыRHQ-IOCL-CPMSL-2020 Rev.0 Master Supplier ListKunal100% (1)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
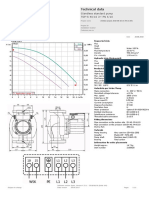
- BOMBAS PRIMARIAS - Data - Sheet - TOP-S - 40 - 10 - 3 - PN - 6 - 10Документ1 страницаBOMBAS PRIMARIAS - Data - Sheet - TOP-S - 40 - 10 - 3 - PN - 6 - 10Sebastian FuentesОценок пока нет
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- fb4cnf 04pd PDFДокумент16 страницfb4cnf 04pd PDFMarianela MasyRubiОценок пока нет
- GuyhirnДокумент4 страницыGuyhirnTyburnОценок пока нет
- As1 Cee317b 2022Документ4 страницыAs1 Cee317b 2022Pheletso Andrias MoloantoaОценок пока нет
- Vibration Testing Theory and PracticeДокумент31 страницаVibration Testing Theory and PracticeDilara Çınarel0% (3)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Stability-Calculation For PipelineДокумент2 страницыStability-Calculation For PipelineGeorge100% (1)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- Most Common Types of Welding DefectsДокумент23 страницыMost Common Types of Welding DefectsRommel GocotanoОценок пока нет
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Use of Fiber-Reinforced Soil For Blast ProtectionДокумент16 страницUse of Fiber-Reinforced Soil For Blast ProtectionSameer ShashwatОценок пока нет
- Head LossДокумент1 страницаHead LossamrОценок пока нет
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- PEH A2-A6 Process Controller Serv Man 0740801006Документ70 страницPEH A2-A6 Process Controller Serv Man 0740801006Mário Silva100% (1)
- 11i10-Int-018 - A - 1-Peecc Interconnections 9a5Документ58 страниц11i10-Int-018 - A - 1-Peecc Interconnections 9a5haytham omarОценок пока нет
- Physics 1st Year Full BookДокумент3 страницыPhysics 1st Year Full BookMukhtar AhmedОценок пока нет
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- Catalogo de Peças QSK 50 G4Документ58 страницCatalogo de Peças QSK 50 G4Evander SarraffОценок пока нет
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Manual-Auto Grease System 自动打黄油操作手册Документ10 страницManual-Auto Grease System 自动打黄油操作手册Khowchae KunapatОценок пока нет
- Field Welding Inspection Checklist: Wisconsin Department of TransportationДокумент1 страницаField Welding Inspection Checklist: Wisconsin Department of TransportationDele TedОценок пока нет
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Mercury Verado ManualДокумент186 страницMercury Verado ManualAnonymous M0OEZEKoGiОценок пока нет
- Solar Refrigeration ReportДокумент64 страницыSolar Refrigeration ReportSakshi JoshiОценок пока нет
- Product Sheet 2002-2111 DN32-DN350Документ2 страницыProduct Sheet 2002-2111 DN32-DN350Justin ReyesОценок пока нет
- UNIT-3 Part-A 1. Write Short Notes On Mixture Requirements of SI EnginesДокумент27 страницUNIT-3 Part-A 1. Write Short Notes On Mixture Requirements of SI EnginesJVCОценок пока нет
- Modelling Heat Transfer During Hot Rolling of Steel StripДокумент18 страницModelling Heat Transfer During Hot Rolling of Steel Stripak123umtОценок пока нет
- Soot BlowingДокумент11 страницSoot BlowingHoncho Abhi SinhaОценок пока нет
- G3500C and G3500E Generator Sets-Maintenance IntervalsДокумент73 страницыG3500C and G3500E Generator Sets-Maintenance Intervalspedropablo1100% (6)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Rhino XS Hydraulically Expandable Reamer - SLBДокумент7 страницRhino XS Hydraulically Expandable Reamer - SLBعمر فلاتةОценок пока нет
- 06012020lagged PipeДокумент9 страниц06012020lagged PipeAlen SajuОценок пока нет
- 2001 Dakota / Durango Service ManualДокумент2 307 страниц2001 Dakota / Durango Service ManualDavid Sterling92% (25)
- Safety in Welding and CuttingДокумент33 страницыSafety in Welding and CuttingBhavya ShuklaОценок пока нет
- Dry Friction of Pure Aluminum Against Steel - N. RusinДокумент8 страницDry Friction of Pure Aluminum Against Steel - N. RusinMiguel Dguez GurríaОценок пока нет
- API 5L PRACTICE QUESTIONS - Doc r2Документ4 страницыAPI 5L PRACTICE QUESTIONS - Doc r2Mhd Ebal100% (2)