Вам также может понравиться
- Data-Driven Traffic Engineering: Understanding of Traffic and Applications Based on Three-Phase Traffic TheoryОт EverandData-Driven Traffic Engineering: Understanding of Traffic and Applications Based on Three-Phase Traffic TheoryОценок пока нет
- Transport Data in The UK and FranceДокумент27 страницTransport Data in The UK and FranceOpen Data InstituteОценок пока нет
- A Study of Metro Manilas Public Transportation SeДокумент19 страницA Study of Metro Manilas Public Transportation SeMeann Benosa CuevasОценок пока нет
- LPTRPM Module 7 Network Analysis Rev2 20180328Документ16 страницLPTRPM Module 7 Network Analysis Rev2 20180328Hugo LabastidaОценок пока нет
- Area Traffic Control SystemsДокумент11 страницArea Traffic Control SystemsVishal Khatri100% (1)
- A Smgcs Definition of Implemetation Levels v1!2!20100630Документ28 страницA Smgcs Definition of Implemetation Levels v1!2!20100630Denny RachmadОценок пока нет
- Appendix 3 Cable Management and Route PlanningДокумент5 страницAppendix 3 Cable Management and Route Planningkaushikray06Оценок пока нет
- CE 44 Highway and Railroad Engineering: Karl Judah C. de Guzman Bsce-3DДокумент26 страницCE 44 Highway and Railroad Engineering: Karl Judah C. de Guzman Bsce-3DKarl Judah De GuzmanОценок пока нет
- Integrated Bridge System 3Документ4 страницыIntegrated Bridge System 3Simon AvramenkoОценок пока нет
- TLC Using VHDLДокумент30 страницTLC Using VHDLnaren_cool05Оценок пока нет
- Automated Highway SystemДокумент25 страницAutomated Highway SystemAniruddha Basu100% (1)
- A Seminar On Intelligent Transport SystemДокумент15 страницA Seminar On Intelligent Transport SystemOliver BenjaminОценок пока нет
- Smart-Traffic-Light-Docu LatestДокумент44 страницыSmart-Traffic-Light-Docu LatestRussell GarciaОценок пока нет
- Software Project ProposalДокумент7 страницSoftware Project ProposalGifhary Chee Cwok LoyalОценок пока нет
- Manual AwesafeДокумент75 страницManual AwesafejusadoОценок пока нет
- A Framework For Adaptive Best Path Determination in Real World TrafficДокумент7 страницA Framework For Adaptive Best Path Determination in Real World TrafficUbiquitous Computing and Communication JournalОценок пока нет
- Smart Traffic Signal Using Parallel Plate CapacitorДокумент6 страницSmart Traffic Signal Using Parallel Plate CapacitorInternational Journal of Application or Innovation in Engineering & ManagementОценок пока нет
- Team 2 Smartcity Traffic ManagementДокумент4 страницыTeam 2 Smartcity Traffic Managementchowdaryganesh36Оценок пока нет
- Intelligent Traffic Light Control System Using Morphological Edge Detection and Fuzzy LogicДокумент4 страницыIntelligent Traffic Light Control System Using Morphological Edge Detection and Fuzzy LogicLipe MartinsОценок пока нет
- Synopsis Traffic SignalДокумент23 страницыSynopsis Traffic SignalPooja GОценок пока нет
- Intelligent Traffic Light Control System Using Morphological Edge Detection and Fuzzy LogicДокумент4 страницыIntelligent Traffic Light Control System Using Morphological Edge Detection and Fuzzy LogicEstefany HuamanОценок пока нет
- 258 Finding Mean Traffic Speed in Low FrameRate VideoДокумент17 страниц258 Finding Mean Traffic Speed in Low FrameRate VideoKakarlamudi PramodОценок пока нет
- Mipro 2016 7522334Документ4 страницыMipro 2016 7522334Anish ShahОценок пока нет
- Characterization of Road Condition With Data MiningДокумент11 страницCharacterization of Road Condition With Data Miningfluxodevalor.trainningОценок пока нет
- Chapter One 1.1 Background of StudyДокумент43 страницыChapter One 1.1 Background of Studyabdulazeez abubakarОценок пока нет
- Corrected Project Proposal (RUNIX)Документ6 страницCorrected Project Proposal (RUNIX)avishka sinethОценок пока нет
- Vehicle Tracking and Classification in Challenging Scenarios Via Slice SamplingДокумент17 страницVehicle Tracking and Classification in Challenging Scenarios Via Slice SamplingYaste YastawiqalОценок пока нет
- ECE 4101-Traffic Engineering 1 Notes Cpt2-1Документ8 страницECE 4101-Traffic Engineering 1 Notes Cpt2-1Kendi KoomeОценок пока нет
- Sensor-Based Traffic Light SystemДокумент1 страницаSensor-Based Traffic Light SystemDaniel VasquezОценок пока нет
- Traffic Signal Duration Control by Estimating Vehicle DensityДокумент6 страницTraffic Signal Duration Control by Estimating Vehicle DensityAnonymous kw8Yrp0R5rОценок пока нет
- 49 - Arman e Tampere - TRC-22-00969 - R1 - AcceptedДокумент26 страниц49 - Arman e Tampere - TRC-22-00969 - R1 - Acceptedalison.pereiraОценок пока нет
- Adaptive Real Time Traffic Prediction Using Deep Neural NetworksДокумент13 страницAdaptive Real Time Traffic Prediction Using Deep Neural NetworksIAES IJAIОценок пока нет
- CIVE580 Mamalashvili Omari Research PaperДокумент11 страницCIVE580 Mamalashvili Omari Research PaperOmari MamalashviliОценок пока нет
- Smart Intersection Design For Traffic Pedestrian AДокумент7 страницSmart Intersection Design For Traffic Pedestrian AVi'ren BoharaОценок пока нет
- Fleet Management and Vehicle Routing Plan Using Dijkstra's Shortest Path AlgorithmДокумент4 страницыFleet Management and Vehicle Routing Plan Using Dijkstra's Shortest Path AlgorithmInternational Journal of Innovative Science and Research TechnologyОценок пока нет
- Design of Traffic Signal and Pedestrian Signal at Gandimaisamma Intersection, Hyderabad A Case StudyДокумент6 страницDesign of Traffic Signal and Pedestrian Signal at Gandimaisamma Intersection, Hyderabad A Case StudyREMYA Y.KОценок пока нет
- FWD ATHPROJECT - 29102020Документ11 страницFWD ATHPROJECT - 29102020Pritesh MalakarОценок пока нет
- Dynamic Speed Adaptation For Path Tracking Based o PDFДокумент22 страницыDynamic Speed Adaptation For Path Tracking Based o PDFOzzy JonesОценок пока нет
- Transportation and Traffic TheoryДокумент21 страницаTransportation and Traffic TheorysaobracajniОценок пока нет
- Density Based Traffic Control Using Image Processing Methods A ReviewДокумент4 страницыDensity Based Traffic Control Using Image Processing Methods A ReviewInternational Journal of Innovative Science and Research TechnologyОценок пока нет
- IEEE LaTeX Template For Transactions On Magnetics 6Документ15 страницIEEE LaTeX Template For Transactions On Magnetics 6Dr.Suresh Chavhan -IIITKОценок пока нет
- Smart Traffic Management Using Deep LearningДокумент3 страницыSmart Traffic Management Using Deep LearningInternational Journal of Innovative Science and Research TechnologyОценок пока нет
- Advance Traffic Control With Density of Vehicles: Jayesh Kumar Chaubey, Mr. Arvind KumarДокумент4 страницыAdvance Traffic Control With Density of Vehicles: Jayesh Kumar Chaubey, Mr. Arvind KumarNavjot SinghОценок пока нет
- Traffic Congestion11Документ39 страницTraffic Congestion11Gokul KrishnanОценок пока нет
- Synopsis 1Документ6 страницSynopsis 1Jp SahooОценок пока нет
- Applied Sciences: Deep Learning System For Vehicular Re-Routing and Congestion AvoidanceДокумент14 страницApplied Sciences: Deep Learning System For Vehicular Re-Routing and Congestion AvoidanceJuan VillacísОценок пока нет
- Density Based Smart Traffic Control System Using Canny Edge DetectionДокумент10 страницDensity Based Smart Traffic Control System Using Canny Edge DetectionIJRASETPublicationsОценок пока нет
- Smart Control of Traffic Using Artificial Intelligence: CE4098D Major Project - Part IДокумент28 страницSmart Control of Traffic Using Artificial Intelligence: CE4098D Major Project - Part IBhaskhar ReddyОценок пока нет
- Traffic Density Detection and Signal AdjustmentДокумент13 страницTraffic Density Detection and Signal AdjustmentRehan KhanОценок пока нет
- Fuzzy LogicДокумент51 страницаFuzzy LogicVinay KumarОценок пока нет
- Don't Go With The Ant Flow: Ant-Inspired Traffic Routing in Urban EnvironmentsДокумент10 страницDon't Go With The Ant Flow: Ant-Inspired Traffic Routing in Urban EnvironmentsAmina NadeemОценок пока нет
- Gawad 2016Документ5 страницGawad 2016Bouzid Med KhaledОценок пока нет
- Beneficios de Microsimulacion Areas amplias..PARAMISCS PDFДокумент7 страницBeneficios de Microsimulacion Areas amplias..PARAMISCS PDFAlex SanchezОценок пока нет
- Web-Based Traffic SystemДокумент7 страницWeb-Based Traffic SystemRiki OktaОценок пока нет
- Congestion Pricing That Respects "Driver Privacy"Документ8 страницCongestion Pricing That Respects "Driver Privacy"accc1100% (2)
- Systematic ReviewДокумент24 страницыSystematic ReviewMOHAMMAD ABU KHALIFAОценок пока нет
- Introduction of Traffic Light Controller With Fuzzy Control SystemДокумент4 страницыIntroduction of Traffic Light Controller With Fuzzy Control SystemamoghaОценок пока нет
- Tracking and Counting of Vehicles For Flow Analysis From Urban Traffic VideosДокумент6 страницTracking and Counting of Vehicles For Flow Analysis From Urban Traffic VideosjuampicОценок пока нет
- tmpDD23 TMPДокумент10 страницtmpDD23 TMPFrontiersОценок пока нет
- ControlДокумент8 страницControldiprodserv nigltdОценок пока нет
- Automatic Speed Control System For Vehicle Design: Rashmi Raj Shubham Kumar SahuДокумент4 страницыAutomatic Speed Control System For Vehicle Design: Rashmi Raj Shubham Kumar SahuShubham KumarОценок пока нет
- Review Paper On Traffic Flow Simulation On PythonДокумент7 страницReview Paper On Traffic Flow Simulation On PythonManushya is LiveОценок пока нет
- Traffic Signal Control With Connected Vehicles: Noah J. Goodall, Brian L. Smith, and Byungkyu (Brian) ParkДокумент10 страницTraffic Signal Control With Connected Vehicles: Noah J. Goodall, Brian L. Smith, and Byungkyu (Brian) Parkpramo_dassОценок пока нет
- Adaptive Tra C Control System Using Dynamic Slot Allocation To Achieve Minimal Congestion in A Stand Alone Road JunctionДокумент8 страницAdaptive Tra C Control System Using Dynamic Slot Allocation To Achieve Minimal Congestion in A Stand Alone Road JunctionBargavi SrinivasОценок пока нет
- Smart Traffic Control System: Prof.R.U.Yawle, Kiran.K.Modak, Parmeshwar.S.Shivshette, Snehal.S.VhavalДокумент4 страницыSmart Traffic Control System: Prof.R.U.Yawle, Kiran.K.Modak, Parmeshwar.S.Shivshette, Snehal.S.VhavalAbhi Dudekula100% (1)
- Density Based Traffic Signal System: I J I R S E TДокумент6 страницDensity Based Traffic Signal System: I J I R S E TDidier Alejandro TobonОценок пока нет
- Density Based Traffic Signal SystemДокумент6 страницDensity Based Traffic Signal SystemAbdulSubhan OwaisiОценок пока нет
- Automatic Number Plate Recognition: Fundamentals and ApplicationsОт EverandAutomatic Number Plate Recognition: Fundamentals and ApplicationsОценок пока нет
- A Hybrid Transformation Technique For Advanced Video Coding: M. Ezhilarasan, P. ThambiduraiДокумент7 страницA Hybrid Transformation Technique For Advanced Video Coding: M. Ezhilarasan, P. ThambiduraiUbiquitous Computing and Communication JournalОценок пока нет
- UBICC 455 Kjayapriya - 455Документ5 страницUBICC 455 Kjayapriya - 455Ubiquitous Computing and Communication JournalОценок пока нет
- UBICC-paper 63 63Документ15 страницUBICC-paper 63 63Ubiquitous Computing and Communication JournalОценок пока нет
- UBICC Journal HassnaaMoustafa 246 246Документ7 страницUBICC Journal HassnaaMoustafa 246 246Usman TariqОценок пока нет
- UBICC-Cameraready 481Документ9 страницUBICC-Cameraready 481Ubiquitous Computing and Communication JournalОценок пока нет
- Ubicc-Cfn 113Документ13 страницUbicc-Cfn 113Ubiquitous Computing and Communication JournalОценок пока нет
- Low Latency Adversarial Transmission Control in 5G Networks For IoTs: Detection, Equalization, Synchronization, EstimationДокумент5 страницLow Latency Adversarial Transmission Control in 5G Networks For IoTs: Detection, Equalization, Synchronization, EstimationUbiquitous Computing and Communication JournalОценок пока нет
- UBICC-montavont 101 101Документ10 страницUBICC-montavont 101 101Ubiquitous Computing and Communication JournalОценок пока нет
- Web Accesible Design Centred On User ExperienceДокумент9 страницWeb Accesible Design Centred On User ExperienceUbiquitous Computing and Communication JournalОценок пока нет
- A Framework For An Aggregated Quality of Service in Mobile Ad Hoc NetworksДокумент9 страницA Framework For An Aggregated Quality of Service in Mobile Ad Hoc NetworksUsman TariqОценок пока нет
- UBICC-submitted 206 206Документ11 страницUBICC-submitted 206 206Ubiquitous Computing and Communication JournalОценок пока нет
- A Game Theoretic Power Control Approach For Mimo Mc-Ds/Cdma SystemsДокумент7 страницA Game Theoretic Power Control Approach For Mimo Mc-Ds/Cdma SystemsUsman TariqОценок пока нет
- UbiCC Paper Framing Pervasive Computing AdnanShaout - 343Документ14 страницUbiCC Paper Framing Pervasive Computing AdnanShaout - 343Ubiquitous Computing and Communication JournalОценок пока нет
- Ubiccjournalvolume2no3 4 43Документ12 страницUbiccjournalvolume2no3 4 43Ubiquitous Computing and Communication JournalОценок пока нет
- Ubiccjournalvolume2no3 7 81Документ8 страницUbiccjournalvolume2no3 7 81Usman TariqОценок пока нет
- Ubicc92 92Документ11 страницUbicc92 92Usman TariqОценок пока нет
- Ubiccjournalvolume2no3 2 28Документ10 страницUbiccjournalvolume2no3 2 28Ubiquitous Computing and Communication JournalОценок пока нет
- Hand-Size Variations Effect On Mobile Phone Texting SatisfactionДокумент8 страницHand-Size Variations Effect On Mobile Phone Texting SatisfactionUbiquitous Computing and Communication JournalОценок пока нет
- Ubiccjournalvolume2no3 5 67Документ9 страницUbiccjournalvolume2no3 5 67Ubiquitous Computing and Communication JournalОценок пока нет
- Ubicc1 Application 1Документ5 страницUbicc1 Application 1Usman TariqОценок пока нет
- Ubiccjournalvolume2no3 1 25Документ5 страницUbiccjournalvolume2no3 1 25Ubiquitous Computing and Communication JournalОценок пока нет
- Ubiccjournalvolume2no3 6 70Документ16 страницUbiccjournalvolume2no3 6 70Ubiquitous Computing and Communication JournalОценок пока нет
- A Novel Opportunistic Spectrum Access For Applications in Cognitive RadioДокумент5 страницA Novel Opportunistic Spectrum Access For Applications in Cognitive RadioUbiquitous Computing and Communication JournalОценок пока нет
- Ubiccform 240Документ6 страницUbiccform 240Ubiquitous Computing and Communication JournalОценок пока нет
- Unconstrained Walking Plane To Virtual Environment For Spatial Learning by Visually ImpairedДокумент7 страницUnconstrained Walking Plane To Virtual Environment For Spatial Learning by Visually ImpairedUbiquitous Computing and Communication JournalОценок пока нет
- Ubicc 659Документ8 страницUbicc 659Ubiquitous Computing and Communication JournalОценок пока нет
- UbiCC Bouzid BookChapter 494Документ12 страницUbiCC Bouzid BookChapter 494Ubiquitous Computing and Communication JournalОценок пока нет
- Ubicc 624 624Документ7 страницUbicc 624 624Ubiquitous Computing and Communication JournalОценок пока нет
- On Importance of Bit Error Rate in Wireless Communication: Rajesh GoelДокумент4 страницыOn Importance of Bit Error Rate in Wireless Communication: Rajesh GoelUsman TariqОценок пока нет
- Person Localization in A Wearable Camera Platform Towards Assistive Technology For Social InteractionsДокумент12 страницPerson Localization in A Wearable Camera Platform Towards Assistive Technology For Social InteractionsUbiquitous Computing and Communication JournalОценок пока нет
- What Is Scheduling and Route Planning?Документ13 страницWhat Is Scheduling and Route Planning?vengai marbhanОценок пока нет
- Dublin Bus and Bus Eireann ReviewДокумент119 страницDublin Bus and Bus Eireann ReviewJohn SirautОценок пока нет
- Amnex Corporate Presentation PDFДокумент28 страницAmnex Corporate Presentation PDFShweta SharmaОценок пока нет
- Use Garmin Basecamp To Download BirdsEye Satellite ImageryДокумент6 страницUse Garmin Basecamp To Download BirdsEye Satellite ImageryGaruda LengoОценок пока нет
- Maryboroughbustimetable PDFДокумент6 страницMaryboroughbustimetable PDFAnonymous zNdbKT993YОценок пока нет
- CV Transmission PlanningДокумент5 страницCV Transmission Planninger.pankajkeshari1784Оценок пока нет
- SANDEEP SIP Report 2 DeptДокумент28 страницSANDEEP SIP Report 2 DeptSalman AhmadОценок пока нет
- Application Software 2: Technology TodayДокумент2 страницыApplication Software 2: Technology TodayNikola PeychevОценок пока нет
- Abroad: Iron Springs Transportation Analysis Report - 2Документ37 страницAbroad: Iron Springs Transportation Analysis Report - 2KrischanSayloGelasanОценок пока нет
- Wartsila Navi Planner BrochureДокумент6 страницWartsila Navi Planner BrochureANDREASBOUL100% (1)
- Opentripplanner - Creating and Querying Your Own Multi-Modal Route PlannerДокумент9 страницOpentripplanner - Creating and Querying Your Own Multi-Modal Route PlannerraneskumarОценок пока нет
- Non-Tech Companies and Their Tech RomanceДокумент170 страницNon-Tech Companies and Their Tech RomanceGreyBОценок пока нет
- Ai-Powered Recommendation Systems For Trip PlanningДокумент8 страницAi-Powered Recommendation Systems For Trip PlanningIJAR JOURNALОценок пока нет
- Homework 4: Modeling, Hierarchical Task Inventory: Google MapsДокумент2 страницыHomework 4: Modeling, Hierarchical Task Inventory: Google MapsPierre MoreauОценок пока нет
- M.M Public School: Presentation On Smart DustbinДокумент14 страницM.M Public School: Presentation On Smart DustbinSanchit RajaОценок пока нет
- A Comprehensive Review of Path Planning For Agricultural Ground RobotsДокумент19 страницA Comprehensive Review of Path Planning For Agricultural Ground RobotsLiv CBОценок пока нет
- Al Shammas CEUS 1-S2.0-S0198971523000443-MainДокумент12 страницAl Shammas CEUS 1-S2.0-S0198971523000443-Mainbarna babajanovaОценок пока нет
- Assessing The Spatial AccessibДокумент20 страницAssessing The Spatial AccessibValentina Castaneda TorresОценок пока нет
- Tesla AppsДокумент5 страницTesla Appsga670533Оценок пока нет
- Revolutionising Agriculture Using Uav (Unmanned Aerial Vehicle)Документ21 страницаRevolutionising Agriculture Using Uav (Unmanned Aerial Vehicle)Neha SwanthalОценок пока нет
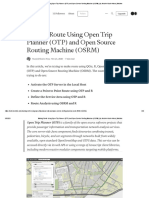
- Making Route Using Open Trip Planner (OTP) and Open Source Routing Machine (OSRM) - by Nuzulul Khairu Nissa - MediumДокумент20 страницMaking Route Using Open Trip Planner (OTP) and Open Source Routing Machine (OSRM) - by Nuzulul Khairu Nissa - MediumDirga DanielОценок пока нет
- Plannerplus: Automated Capacity Management For Optimized Network DesignsДокумент4 страницыPlannerplus: Automated Capacity Management For Optimized Network DesignsPrasanna GanesanОценок пока нет