Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (120)
- Moritz, S. - 2010-imputeTS Time Series Missing ValueДокумент12 страницMoritz, S. - 2010-imputeTS Time Series Missing ValueJuan Francisco Durango GrisalesОценок пока нет
- Review of Data Fusion Methods For Real-Time and Multi-Sensor Traffic Flow AnalysisДокумент19 страницReview of Data Fusion Methods For Real-Time and Multi-Sensor Traffic Flow AnalysisTushar MukherjeeОценок пока нет
- MagaamaДокумент63 страницыMagaamasamadozousОценок пока нет
- Towards Empowering Fishermen Community: A Case Study of Kuala Rompin, MalaysiaДокумент14 страницTowards Empowering Fishermen Community: A Case Study of Kuala Rompin, MalaysiaVivi DwiОценок пока нет
- Estimation For QuadrotorsДокумент12 страницEstimation For QuadrotorsMinh HoangОценок пока нет
- Installation and User Manual GNSS Analysis App v3000Документ30 страницInstallation and User Manual GNSS Analysis App v3000fОценок пока нет
- Load Forecasting Techniques and MethodologiesДокумент11 страницLoad Forecasting Techniques and MethodologiespotatoОценок пока нет
- Week4 1Документ34 страницыWeek4 1Le minhОценок пока нет
- A Review of State of The Art Techniques For PMSM Parameter IdentificationДокумент11 страницA Review of State of The Art Techniques For PMSM Parameter IdentificationDHRUV UPADHAYAОценок пока нет
- Comandos de ScilabДокумент11 страницComandos de ScilabAlejandro Galindo Vega0% (1)
- Research Article: IMU-Based Online Kinematic Calibration of Robot ManipulatorДокумент11 страницResearch Article: IMU-Based Online Kinematic Calibration of Robot ManipulatorPAL ROBOTОценок пока нет
- Object Tracking Methods-A ReviewДокумент7 страницObject Tracking Methods-A ReviewIvan FadillahОценок пока нет
- Pallavi Matti Under Supervision of DR Shovan BhaumikДокумент22 страницыPallavi Matti Under Supervision of DR Shovan Bhaumiks_bhaumikОценок пока нет
- Master Thesis PDFДокумент62 страницыMaster Thesis PDFMichael TaslimanОценок пока нет
- Application of The DGPS Method For The Precise PosДокумент15 страницApplication of The DGPS Method For The Precise PosMongoose82Оценок пока нет
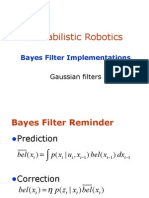
- Probabilistic Robotics: Bayes Filter ImplementationsДокумент61 страницаProbabilistic Robotics: Bayes Filter ImplementationsMatt Brian CapangpanganОценок пока нет
- EWAEWC Pair Trade Kalman FilterДокумент4 страницыEWAEWC Pair Trade Kalman FilterJasonClarkОценок пока нет
- 2.1 Modelling of Discrete-Time SystemsДокумент25 страниц2.1 Modelling of Discrete-Time SystemsstefanОценок пока нет
- A Robust Autonomous Following Method For Mobile Robots in Dynamic EnvironmentsДокумент15 страницA Robust Autonomous Following Method For Mobile Robots in Dynamic Environmentsabinaya_359109181Оценок пока нет
- Control and InstrumentationДокумент31 страницаControl and InstrumentationSiva MurugesanОценок пока нет
- 07 KalmanexamplesДокумент34 страницы07 KalmanexamplesGonzaloОценок пока нет
- Bess 1Документ180 страницBess 1dan_geplОценок пока нет
- Model-Based Wind Estimation For A Hovering VTOL Tailsitter UAVДокумент8 страницModel-Based Wind Estimation For A Hovering VTOL Tailsitter UAVcesarОценок пока нет
- State of Health Estimation For An EV BatteryДокумент6 страницState of Health Estimation For An EV Batteryvivekanand_bonalОценок пока нет
- A Review of Terrain Aided Navigation For Underwater VehiclesДокумент16 страницA Review of Terrain Aided Navigation For Underwater VehiclesPrasad PatilОценок пока нет
- PHD Thesis - Javed Ahmed - R3 (Final)Документ151 страницаPHD Thesis - Javed Ahmed - R3 (Final)api-3858870100% (1)
- 1 s2.0 S0169260721004880 MainДокумент13 страниц1 s2.0 S0169260721004880 MainmaketoОценок пока нет
- Final 1 PPTДокумент34 страницыFinal 1 PPTraviОценок пока нет
- Fundamentals of Statistical Signal Processing Estimation 3001q9c4fjДокумент5 страницFundamentals of Statistical Signal Processing Estimation 3001q9c4fjVaidhyanathan AnbalaganОценок пока нет
- Biometrika TrustДокумент14 страницBiometrika TrustMing KuangОценок пока нет