Вам также может понравиться
- Crucigramas numéricos de matemáticas (aritmetica y algebra)От EverandCrucigramas numéricos de matemáticas (aritmetica y algebra)Оценок пока нет
- Suseciones AritmeticasДокумент4 страницыSuseciones AritmeticasGarezОценок пока нет
- 29.-Orden de Información (R.M)Документ2 страницы29.-Orden de Información (R.M)sonia huamán martelОценок пока нет
- MASДокумент21 страницаMASMG NickОценок пока нет
- Pendulo SimpleДокумент13 страницPendulo SimplePaola AndreaОценок пока нет
- Aritmetica 1° Parte 2Документ48 страницAritmetica 1° Parte 2KenyiRufinoAteroОценок пока нет
- Estudio de Oscilaciones Del Sistema Masa Resorte y An Lisis de Oscilaciones Amortiguadas en Un P Ndulo Simple Con Simuladores Phet v1Документ8 страницEstudio de Oscilaciones Del Sistema Masa Resorte y An Lisis de Oscilaciones Amortiguadas en Un P Ndulo Simple Con Simuladores Phet v1Cristian Manuel Sierra JerezОценок пока нет
- Estática Momnto de Una FuerzaДокумент2 страницыEstática Momnto de Una FuerzaJacosuОценок пока нет
- Unmsm Laboratorio de Fisica I - InformeДокумент16 страницUnmsm Laboratorio de Fisica I - InformeEdward MinianoОценок пока нет
- Sucesiones Aritméticas y Geométricas para Cuarto Grado de SecundariaДокумент2 страницыSucesiones Aritméticas y Geométricas para Cuarto Grado de Secundariagrecia tatiana colmenares yoveraОценок пока нет
- Pendulo SimpleДокумент9 страницPendulo SimpleSindy Tatiana Mejia Sanchez (Estudiante)Оценок пока нет
- Seminario NumeracionДокумент4 страницыSeminario NumeracionJuan Marcavillaca LaurenteОценок пока нет
- F2 - S01 - PPT - Cinemática Del Mas y PéndulosДокумент32 страницыF2 - S01 - PPT - Cinemática Del Mas y PéndulosDarwin Adanaque100% (1)
- Ficha de Trabajo Fracciones y Números MixtosДокумент6 страницFicha de Trabajo Fracciones y Números MixtosVivian QuirozОценок пока нет
- Proyecto Ascensor..Jaramillo Monteros Narvaez UlcuangoДокумент18 страницProyecto Ascensor..Jaramillo Monteros Narvaez Ulcuangoriky1309Оценок пока нет
- Mas y Pendulo Ejercicios ResueltosДокумент19 страницMas y Pendulo Ejercicios ResueltosAlejandro SanchezОценок пока нет
- RM I 5°secДокумент36 страницRM I 5°secnicolaschullunquia100% (1)
- A 5ºaño S7 Numeracion IIIДокумент2 страницыA 5ºaño S7 Numeracion IIIJuan Roberto Puma ApazaОценок пока нет
- 6 Centroide de Una Region y PappusДокумент22 страницы6 Centroide de Una Region y PappusedesmitОценок пока нет
- Aritmetica 2 Do Año PDFДокумент14 страницAritmetica 2 Do Año PDFAngela Melgarejo MontesinosОценок пока нет
- EJERCICIOS TRIGONOMETRIa 1º BacДокумент3 страницыEJERCICIOS TRIGONOMETRIa 1º BacIria Fernández GilОценок пока нет
- Péndulo Físico (F3)Документ6 страницPéndulo Físico (F3)Nicolas OlarteОценок пока нет
- 1-Raz-Matemático-Preintermedio (A - B) PDFДокумент41 страница1-Raz-Matemático-Preintermedio (A - B) PDFTinoco Coronel JhordyОценок пока нет
- Movimiento Armónico Simple y AmortiguadoДокумент19 страницMovimiento Armónico Simple y AmortiguadoGiordano Smith Alvarado Rodriguez100% (1)
- Inferencia 1Документ28 страницInferencia 1lhervertОценок пока нет
- FS105 FormularioДокумент5 страницFS105 FormularioFelipe Godinez GarciaОценок пока нет
- Dinámica RotacionalДокумент133 страницыDinámica RotacionalXavier Gudiño100% (1)
- Tarea 1 - Módulo 1 - Ejercicios Series Aritméticas y GeométricasДокумент12 страницTarea 1 - Módulo 1 - Ejercicios Series Aritméticas y GeométricasAldo RodríguezОценок пока нет
- Problemas-de-Cambio-de-Base-Para-2SДокумент2 страницыProblemas-de-Cambio-de-Base-Para-2SpapasОценок пока нет
- 14 Sustitucion TrigonometricaДокумент13 страниц14 Sustitucion TrigonometricaEncore RiosОценок пока нет
- Modelos ProbabilisticosДокумент22 страницыModelos ProbabilisticosMARCO ANTONIO LUIS RAMIREZОценок пока нет
- 2016 06 18 Madrid Problema1Документ2 страницы2016 06 18 Madrid Problema1Marta MarquesОценок пока нет
- Electrostática PresentaciónДокумент55 страницElectrostática Presentaciónwendy paola chcaОценок пока нет
- Segunda Ley de NewtonДокумент7 страницSegunda Ley de NewtonPaula Suarez100% (1)
- Problemas de Optimización - Juan Diego Valencia MendozaДокумент12 страницProblemas de Optimización - Juan Diego Valencia MendozaJuan Diego VMОценок пока нет
- S06.s2 - PPT Momento de FuerzaДокумент22 страницыS06.s2 - PPT Momento de FuerzaBruno Estela ObregonОценок пока нет
- MetroДокумент7 страницMetroAbel MurañaОценок пока нет
- 2016 06 18 Andalucía Física1Документ2 страницы2016 06 18 Andalucía Física1rocio sanchezОценок пока нет
- 7 Cantidad de Movimiento, Impulso de Una Fuerza y ChoquesДокумент11 страниц7 Cantidad de Movimiento, Impulso de Una Fuerza y Choquesjose100% (1)
- Conversión de Coordenadas Cartesianas A PolaresДокумент8 страницConversión de Coordenadas Cartesianas A PolaresJesús Emmanuel100% (1)
- Banco de Ejercicios de TrigonometríaДокумент13 страницBanco de Ejercicios de TrigonometríaFlavio LópezОценок пока нет
- Problemas CinemáticaДокумент2 страницыProblemas CinemáticaSonia PradoОценок пока нет
- Numeracion PDFДокумент28 страницNumeracion PDFJose CarlosОценок пока нет
- Desigualdades InecuacionesДокумент5 страницDesigualdades InecuacionesAriel Alejandro Jara DíazОценок пока нет
- Movimiento Circular Uniforme MCU - Ejercicios Resueltos MatemóvilДокумент40 страницMovimiento Circular Uniforme MCU - Ejercicios Resueltos MatemóvilMigel BohorquezОценок пока нет
- Formulario Mecanismos y Ejercicios ResueltosДокумент7 страницFormulario Mecanismos y Ejercicios ResueltosJosé Peña MuñozОценок пока нет
- Resumen de Fórmulas Física 1Документ11 страницResumen de Fórmulas Física 1Alejandro G. SoutoОценок пока нет
- S11 Momento de FuerzaДокумент14 страницS11 Momento de Fuerzafrancisco100% (1)
- Ejercicios de Numeracion para Quinto Grado de SecundariaДокумент4 страницыEjercicios de Numeracion para Quinto Grado de SecundariaJanet Lopez CordovaОценок пока нет
- Caida LibreДокумент12 страницCaida LibreCejb Circulo de EstudiosОценок пока нет
- Espacios VectorialesДокумент51 страницаEspacios VectorialesAnonymous nfGqSiDw1DОценок пока нет
- Formulario Secciones ConicasДокумент4 страницыFormulario Secciones Conicasadriantlc100% (1)
- Calculo 1Документ3 страницыCalculo 1RENEE ALONSO TRAVEZA�O LOPEZОценок пока нет
- Método de Integración en Forma Tabular PDFДокумент8 страницMétodo de Integración en Forma Tabular PDFAngel OsorioОценок пока нет
- Diagramas y Polifonías. Experiencias de PensamientoОт EverandDiagramas y Polifonías. Experiencias de PensamientoОценок пока нет
- Notas de FIS-101 - Física II - BДокумент3 страницыNotas de FIS-101 - Física II - BJose Andres CaliОценок пока нет
- Clase 3Документ14 страницClase 3Lucas MuñozОценок пока нет
- Instalar Un Grifo Termostático Con Ducha.Документ6 страницInstalar Un Grifo Termostático Con Ducha.api-119251807Оценок пока нет
- ProgramaДокумент15 страницProgramachrystian miguel quintero mendozaОценок пока нет
- Manual Taller Opel Astra Vetra Zafira 2.0 Di Y Dti (Español) PDFДокумент18 страницManual Taller Opel Astra Vetra Zafira 2.0 Di Y Dti (Español) PDFMarcelo Fabian Lascurain63% (8)
- Aplicacionesdelasecuacionesdiferencialesaproblemasvaciadodetanquesautoguardado 120827162216 Phpapp02Документ40 страницAplicacionesdelasecuacionesdiferencialesaproblemasvaciadodetanquesautoguardado 120827162216 Phpapp02Oliva YoshelynОценок пока нет
- Motor Wankel PDFДокумент8 страницMotor Wankel PDFEdita MartínezОценок пока нет
- Trabajo Final de Legislacion Ambiental FinalДокумент84 страницыTrabajo Final de Legislacion Ambiental FinalJonyer Hardy Zapata100% (1)
- Teorema de FerrarisДокумент3 страницыTeorema de FerrarisLilianaFernandezCamacho50% (2)
- Capitulo3 Relay&SolenoidsДокумент19 страницCapitulo3 Relay&SolenoidsAguila RealОценок пока нет
- EDET - Líneas Aéreas Convencionales de 33kVДокумент132 страницыEDET - Líneas Aéreas Convencionales de 33kVPabloAlvОценок пока нет
- Qui MicaДокумент6 страницQui Micaclever arias rondinelОценок пока нет
- TransistoresДокумент23 страницыTransistoresyuzke15Оценок пока нет
- Descripción GeneralДокумент43 страницыDescripción GeneralCésar Ricardo Mamani Retamales100% (1)
- BombasДокумент35 страницBombasOsweld-Super Toronto-MataОценок пока нет
- Máquina de Inyección de Espuma de PoliuretanoДокумент2 страницыMáquina de Inyección de Espuma de Poliuretanosoufi1100% (1)
- Proyecto Cargador Sola para CelularДокумент18 страницProyecto Cargador Sola para Celularfernando lezamaОценок пока нет
- 5.3 Fuentes de Energía Alternativa Bajo Estándares Tecnológicos.Документ5 страниц5.3 Fuentes de Energía Alternativa Bajo Estándares Tecnológicos.Cruz IgnacioОценок пока нет
- 2do Trabajo Domiciliario AeДокумент27 страниц2do Trabajo Domiciliario AeBERNAOLA GASPAR CESAR ALFREDOОценок пока нет
- Tarifa 2014 CalpedaДокумент119 страницTarifa 2014 CalpedaedgarОценок пока нет
- 1 - Introducción Sistemas FotovoltaicosДокумент25 страниц1 - Introducción Sistemas FotovoltaicosEsteban NazzoОценок пока нет
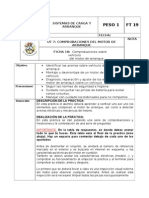
- FT 18 Analisis y Comprobacion de Los Elementos Del Motor de ArranqueДокумент16 страницFT 18 Analisis y Comprobacion de Los Elementos Del Motor de ArranqueSebastian Ayala GilОценок пока нет
- Laboratorio #4 de Máquinas Eléctricas EstáticasДокумент18 страницLaboratorio #4 de Máquinas Eléctricas EstáticasBRIAN WASHINGTON DEL MAR RODRIGUEZОценок пока нет
- GFPI-F-019 - GUIA - DE - APRENDIZAJE Motores ElectricosДокумент13 страницGFPI-F-019 - GUIA - DE - APRENDIZAJE Motores ElectricosCamilo Patiño100% (1)
- Catalogo Seguros SeegerДокумент44 страницыCatalogo Seguros SeegerVlad Fern100% (4)
- Movimientos de La Tierra ALUMNADOДокумент2 страницыMovimientos de La Tierra ALUMNADOnogara100Оценок пока нет
- Balance de Energía en La Producción de EtanolДокумент6 страницBalance de Energía en La Producción de EtanolDiego Alejandro López ChávezОценок пока нет
- Libro EolicaДокумент2 страницыLibro Eolicamiguel ariasОценок пока нет
- Leer Paneles SolaresДокумент8 страницLeer Paneles SolaresAlex InostrozaОценок пока нет
- CTA S8 Anexo 2Документ2 страницыCTA S8 Anexo 2rosario sucapucaОценок пока нет
- Como Leer Las BujiasДокумент4 страницыComo Leer Las Bujiasmena_omar3677Оценок пока нет