Вам также может понравиться
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Photon Trading - Market Structure BasicsДокумент11 страницPhoton Trading - Market Structure Basicstula amar100% (2)
- Linux For Beginners - Shane BlackДокумент165 страницLinux For Beginners - Shane BlackQuod Antichristus100% (1)
- Food and Beverage Department Job DescriptionДокумент21 страницаFood and Beverage Department Job DescriptionShergie Rivera71% (7)
- Executive Summary - Pseudomonas AeruginosaДокумент6 страницExecutive Summary - Pseudomonas Aeruginosaapi-537754056Оценок пока нет
- Engineering Management (Final Exam)Документ2 страницыEngineering Management (Final Exam)Efryl Ann de GuzmanОценок пока нет
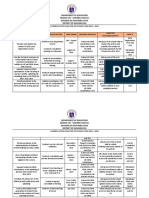
- Action Plan Lis 2021-2022Документ3 страницыAction Plan Lis 2021-2022Vervie BingalogОценок пока нет
- IdM11gR2 Sizing WP LatestДокумент31 страницаIdM11gR2 Sizing WP Latesttranhieu5959Оценок пока нет
- Cam Action: Series: Inch StandardДокумент6 страницCam Action: Series: Inch StandardVishwa NОценок пока нет
- RevisionHistory APFIFF33 To V219Документ12 страницRevisionHistory APFIFF33 To V219younesОценок пока нет
- Ikea AnalysisДокумент33 страницыIkea AnalysisVinod BridglalsinghОценок пока нет
- Online EarningsДокумент3 страницыOnline EarningsafzalalibahttiОценок пока нет
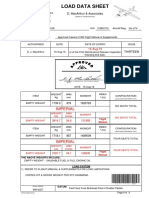
- Load Data Sheet: ImperialДокумент3 страницыLoad Data Sheet: ImperialLaurean Cub BlankОценок пока нет
- Ludwig Van Beethoven: Für EliseДокумент4 страницыLudwig Van Beethoven: Für Eliseelio torrezОценок пока нет
- MSDS - Tuff-Krete HD - Part DДокумент6 страницMSDS - Tuff-Krete HD - Part DAl GuinitaranОценок пока нет
- Chapter 5Документ3 страницыChapter 5Showki WaniОценок пока нет
- Cryo EnginesДокумент6 страницCryo EnginesgdoninaОценок пока нет
- 06-Apache SparkДокумент75 страниц06-Apache SparkTarike ZewudeОценок пока нет
- Low Cost Building ConstructionДокумент15 страницLow Cost Building ConstructionAtta RehmanОценок пока нет
- 23 Things You Should Know About Excel Pivot Tables - Exceljet PDFДокумент21 страница23 Things You Should Know About Excel Pivot Tables - Exceljet PDFRishavKrishna0% (1)
- Ajp Project (1) MergedДокумент22 страницыAjp Project (1) MergedRohit GhoshtekarОценок пока нет
- LMU-2100™ Gprs/Cdmahspa Series: Insurance Tracking Unit With Leading TechnologiesДокумент2 страницыLMU-2100™ Gprs/Cdmahspa Series: Insurance Tracking Unit With Leading TechnologiesRobert MateoОценок пока нет
- Social Media Marketing Advice To Get You StartedmhogmДокумент2 страницыSocial Media Marketing Advice To Get You StartedmhogmSanchezCowan8Оценок пока нет
- Avalon LF GB CTP MachineДокумент2 страницыAvalon LF GB CTP Machinekojo0% (1)
- Continue: Rudolf Bultmann Theology of The New Testament PDFДокумент3 страницыContinue: Rudolf Bultmann Theology of The New Testament PDFpishoi gerges0% (1)
- Hayashi Q Econometica 82Документ16 страницHayashi Q Econometica 82Franco VenesiaОценок пока нет
- Epidemiologi DialipidemiaДокумент5 страницEpidemiologi DialipidemianurfitrizuhurhurОценок пока нет
- Are Groups and Teams The Same Thing? An Evaluation From The Point of Organizational PerformanceДокумент6 страницAre Groups and Teams The Same Thing? An Evaluation From The Point of Organizational PerformanceNely Noer SofwatiОценок пока нет
- QUIZ Group 1 Answer KeyДокумент3 страницыQUIZ Group 1 Answer KeyJames MercadoОценок пока нет
- Heavy LiftДокумент4 страницыHeavy Liftmaersk01Оценок пока нет
- 2016 066 RC - LuelcoДокумент11 страниц2016 066 RC - LuelcoJoshua GatumbatoОценок пока нет