Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Ntegra: Multi-Currency Desktop Banknote Counter / SorterДокумент2 страницыNtegra: Multi-Currency Desktop Banknote Counter / SorterJAIMINОценок пока нет
- Harris VTM SERIES ScopesДокумент3 страницыHarris VTM SERIES ScopesMarco VolpeОценок пока нет
- OOT TutorialДокумент3 страницыOOT TutorialChaeriah WaelОценок пока нет
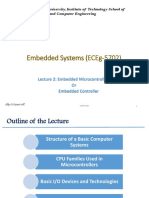
- Embedded Systems Lecture 2Документ60 страницEmbedded Systems Lecture 2Nebiyu TakeleОценок пока нет
- 1602-18-737-071 ES&IOT Lab 1 - MergedДокумент139 страниц1602-18-737-071 ES&IOT Lab 1 - Mergedcity cyberОценок пока нет
- Dicionario de Simbolos Jean Chevalier PD PDFДокумент4 страницыDicionario de Simbolos Jean Chevalier PD PDFGreicy Mauricio Magam0% (1)
- Activar Office 365Документ1 страницаActivar Office 365chteao occoner62% (58)
- OSI Aardvark ThiefДокумент2 страницыOSI Aardvark ThiefAJ AjsonОценок пока нет
- Owner's Manual: Dyna-KitДокумент12 страницOwner's Manual: Dyna-KitCebeliTarikОценок пока нет
- Operating Systems: Project ReportsДокумент33 страницыOperating Systems: Project ReportsMafruha Rahman MariamОценок пока нет
- Blue Prism - Solution Design Overview PDFДокумент27 страницBlue Prism - Solution Design Overview PDFbnanduriОценок пока нет
- LIN Serial Analyzer User's Guide Rev2.0: 2008 Microchip Technology Inc. DS51675BДокумент36 страницLIN Serial Analyzer User's Guide Rev2.0: 2008 Microchip Technology Inc. DS51675Bvothanhha120485Оценок пока нет
- Jyothi Engineering College: Lab ManualДокумент11 страницJyothi Engineering College: Lab Manualtmsbharadwaj100% (1)
- Resize Partitions in VistaДокумент59 страницResize Partitions in Vistakds incОценок пока нет
- Practical: 1: Aim: Getting Started With Nodemcu, Arduino With Esp8266 and Esp32 in The Arduino IdeДокумент25 страницPractical: 1: Aim: Getting Started With Nodemcu, Arduino With Esp8266 and Esp32 in The Arduino IdeGanesh GhutiyaОценок пока нет
- StudentManual Cf238studДокумент716 страницStudentManual Cf238studaliscribd123456Оценок пока нет
- TS-1-Number Systems PDFДокумент2 страницыTS-1-Number Systems PDFUdai Kumar33% (3)
- Models 33.12Документ717 страницModels 33.12Divyesh KhandhediaОценок пока нет
- Deploy Qlik Sense Enterprise On WindowsДокумент362 страницыDeploy Qlik Sense Enterprise On WindowsIvaylo DimovОценок пока нет
- HP Proliant Dl380 G4 Storage Server: Data SheetДокумент4 страницыHP Proliant Dl380 G4 Storage Server: Data SheetoonОценок пока нет
- Naslite Plus ManualДокумент11 страницNaslite Plus Manualgregory_hamilton_9Оценок пока нет
- DP Monitor 15055 DriversДокумент1 151 страницаDP Monitor 15055 DriversGonzales NavarroОценок пока нет
- Data Structure Preliminaries, Array and Linked ListДокумент9 страницData Structure Preliminaries, Array and Linked ListAntonio RogersОценок пока нет
- PsExec - Execute Process RemotelyДокумент2 страницыPsExec - Execute Process RemotelyYasir KhanОценок пока нет
- Master MST3000 Motorcycle Scanner User ManualДокумент18 страницMaster MST3000 Motorcycle Scanner User Manualobd365Оценок пока нет
- Chapter 12: Data StructuresДокумент35 страницChapter 12: Data StructuresMouhamad BazziОценок пока нет
- BCA - Seminar - Final - CertiДокумент48 страницBCA - Seminar - Final - CertiVaibhav BhingradiyaОценок пока нет
- XHIBITДокумент2 страницыXHIBITAlexandra JanicОценок пока нет
- Logicore Ip Reed-Solomon Encoder v8.0: Product GuideДокумент30 страницLogicore Ip Reed-Solomon Encoder v8.0: Product GuideamanОценок пока нет
- Java Programming: Program 2: Write A Program in Java For Widening and Narrowing ConversionДокумент4 страницыJava Programming: Program 2: Write A Program in Java For Widening and Narrowing Conversionumair riazОценок пока нет