Вам также может понравиться
- The Hydraulic Trainer Volume 1 (Basic Principles & Components of Fluid Technology)Документ327 страницThe Hydraulic Trainer Volume 1 (Basic Principles & Components of Fluid Technology)Guido Dorigoni100% (32)
- Sizing of Servo ValveДокумент19 страницSizing of Servo Valveragdapattice100% (3)
- 00hydr Fundamentals PDFДокумент298 страниц00hydr Fundamentals PDFpcalver2000Оценок пока нет
- Solenoid Actuators: Theory and Computational MethodsОт EverandSolenoid Actuators: Theory and Computational MethodsРейтинг: 3 из 5 звезд3/5 (1)
- Moog Technical Bulletin 103Документ11 страницMoog Technical Bulletin 103William PetersОценок пока нет
- Practical Hydraulic Systems: Operation and Troubleshooting for Engineers and TechniciansОт EverandPractical Hydraulic Systems: Operation and Troubleshooting for Engineers and TechniciansРейтинг: 4 из 5 звезд4/5 (8)
- Centrifugal Fan Design: Design of Inlet Duct and ImpellerДокумент9 страницCentrifugal Fan Design: Design of Inlet Duct and ImpellerTanish VermaОценок пока нет
- MFB TrainingДокумент19 страницMFB Trainingragdapattice100% (6)
- Moog ServovalvesДокумент8 страницMoog Servovalvesdylan_dearing@hotmail.com100% (1)
- General IntroductionДокумент21 страницаGeneral Introductionragdapattice75% (4)
- Control Components in Hydraulic SystemsДокумент20 страницControl Components in Hydraulic SystemsfazliОценок пока нет
- Hydraulic Proportional Closed Loop System Design PDFДокумент86 страницHydraulic Proportional Closed Loop System Design PDFragdapattice100% (7)
- How Does A MOOG Servo Valve OperatesДокумент5 страницHow Does A MOOG Servo Valve OperatesMikoto Rifky100% (1)
- DDV Training NewДокумент31 страницаDDV Training Newragdapattice100% (1)
- Hydraulic Pumps IIДокумент61 страницаHydraulic Pumps IIloveincyber3100% (3)
- Proportional Hydraulics Decoded PDFДокумент63 страницыProportional Hydraulics Decoded PDFRobert MarkovskiОценок пока нет
- Hydraulic Proportional Servo TechnologiesДокумент37 страницHydraulic Proportional Servo Technologiescristi_amaОценок пока нет
- H Electro Hydraulic Controls YukenДокумент142 страницыH Electro Hydraulic Controls Yukenchidambaram kasi100% (1)
- Fluid Power CircuitsДокумент176 страницFluid Power CircuitsMike Fredskilde97% (29)
- Electro Hydraulics: Control Technology ConceptsДокумент98 страницElectro Hydraulics: Control Technology Concepts@nshu_theachiever88% (8)
- Moog Controllers MotionControllers Catalog enДокумент68 страницMoog Controllers MotionControllers Catalog enKamillAL-akhras100% (1)
- Electro Hydraulic Servo ValveДокумент8 страницElectro Hydraulic Servo ValveabyzenОценок пока нет
- MOOG - JRA1 Actuation at MoogДокумент32 страницыMOOG - JRA1 Actuation at MoogBazlur Rahman SohelОценок пока нет
- Secondary Control PP PDFДокумент60 страницSecondary Control PP PDFbrunosamaeianОценок пока нет
- Overcenter ValvesДокумент4 страницыOvercenter ValvesAnonymous jSTkQVC27b100% (1)
- Training Servo Hydraulic Drive Systems 36Документ61 страницаTraining Servo Hydraulic Drive Systems 36Gary Jenkins100% (4)
- Hydraulics and PneumaticsДокумент20 страницHydraulics and Pneumaticsharishme028100% (2)
- Festo-Proportional Hydraulics Advanced LevelДокумент194 страницыFesto-Proportional Hydraulics Advanced Levelalissondcs100% (1)
- Hydrostatic Drive DimensioningДокумент23 страницыHydrostatic Drive DimensioningAnonymous 5bDmByBfs100% (1)
- Application and Analysis in Fluid Power SystemsДокумент288 страницApplication and Analysis in Fluid Power Systemskhursheirani100% (1)
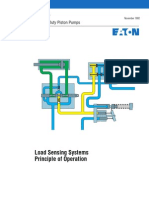
- Load Sensing Syst. Princ Oper. EatonДокумент28 страницLoad Sensing Syst. Princ Oper. EatonPedro Blanco92% (12)
- Proportional Valve TroubleshootingДокумент48 страницProportional Valve Troubleshootingbrunosamaeian100% (1)
- Moog Hydraulic Servo Valve Construction Plus Moog PDFДокумент13 страницMoog Hydraulic Servo Valve Construction Plus Moog PDFJean DesingermainОценок пока нет
- Industrial Automation: BITS Pilani, Pilani CampusДокумент132 страницыIndustrial Automation: BITS Pilani, Pilani CampusAnurag RanjanОценок пока нет
- Industrial Hydraulic CircuitsДокумент16 страницIndustrial Hydraulic CircuitskingkakingОценок пока нет
- Servo Valve Coloring BookДокумент18 страницServo Valve Coloring BooksaikatmeОценок пока нет
- Hydraulic Basics - LunchBox SessionsДокумент27 страницHydraulic Basics - LunchBox SessionsAnonymous jlLBRMAr3O50% (2)
- Industrial HydraulicsДокумент89 страницIndustrial Hydraulicsnishhhengg100% (2)
- Volume-3. Study of Hydraulic Valves, Pumps, and AccumulatorsДокумент79 страницVolume-3. Study of Hydraulic Valves, Pumps, and AccumulatorsQ.S. Khan100% (25)
- FESTO Electro-Hydraulics - Basic LevelДокумент203 страницыFESTO Electro-Hydraulics - Basic LevelAnonymous nOqqYoDvz100% (2)
- 2 Sim Hydraulics ReferenceДокумент430 страниц2 Sim Hydraulics ReferenceEnrico GambiniОценок пока нет
- Pneumatic and Hydraulic Control Systems: Seminar on Pneumohydraulic AutomationОт EverandPneumatic and Hydraulic Control Systems: Seminar on Pneumohydraulic AutomationРейтинг: 4 из 5 звезд4/5 (3)
- Pneumatic and Hydraulic Control Systems: Seminar on Pneumohydraulic Automation (First Session)От EverandPneumatic and Hydraulic Control Systems: Seminar on Pneumohydraulic Automation (First Session)Рейтинг: 1 из 5 звезд1/5 (1)
- л р 5Документ3 страницыл р 5Mary SwimerОценок пока нет
- Chopper Basic PDFДокумент12 страницChopper Basic PDFSoumya DuttaОценок пока нет
- HW2 SДокумент5 страницHW2 S엄기웅Оценок пока нет
- SSM2164 4-Pole With Pole-Mixing: 1 VCA-based 1-Pole LPFДокумент5 страницSSM2164 4-Pole With Pole-Mixing: 1 VCA-based 1-Pole LPFJP ShakespeareОценок пока нет
- DC MachinesДокумент10 страницDC Machinesprince ian cruzОценок пока нет
- Journal of Fluid Mechanics Digital Archive Volume 4 Issue 1958 (Doi 10.1017 - S0022112058000318) R. B. Payne - Calculations of Unsteady Viscous Flow Past A Circular Cylinder PDFДокумент6 страницJournal of Fluid Mechanics Digital Archive Volume 4 Issue 1958 (Doi 10.1017 - S0022112058000318) R. B. Payne - Calculations of Unsteady Viscous Flow Past A Circular Cylinder PDFSrinivas JangiliОценок пока нет
- AQRspicemodelДокумент13 страницAQRspicemodelRakesh SandarativjuОценок пока нет
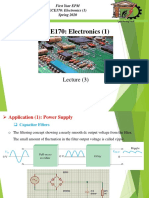
- ECE170: Electronics (1) : LectureДокумент40 страницECE170: Electronics (1) : LectureKhaled MohamedОценок пока нет
- Circuit Theory: Report BigprojectДокумент10 страницCircuit Theory: Report BigprojectVũ Hoàng LongОценок пока нет
- Estimation of Synchronous Machine Parameters by Standstill TestsДокумент13 страницEstimation of Synchronous Machine Parameters by Standstill TestsLuqmanMaraabaОценок пока нет
- 445lab1 PDFДокумент12 страниц445lab1 PDFAnonymous Vf8WkaBoB8Оценок пока нет
- CHAP3.Arus Bolak BalikДокумент35 страницCHAP3.Arus Bolak BalikOmi Luthfia RahmanОценок пока нет
- .:: Astrill Error ::. &NBSP Socket Error # 10053 Software Caused Connection Abort. What Can You Do To Solve The Error: Try To Switch To Another Server If The Error Persists.Документ36 страниц.:: Astrill Error ::. &NBSP Socket Error # 10053 Software Caused Connection Abort. What Can You Do To Solve The Error: Try To Switch To Another Server If The Error Persists.franz_passariniОценок пока нет
- Servo Valves TechnicalДокумент24 страницыServo Valves Technicalobvert100% (2)
- Proceedings of The Institution of Mechanical Engineers, Part I - Journal of Systems and Control Engineering-2009-Ruan-135-47Документ14 страницProceedings of The Institution of Mechanical Engineers, Part I - Journal of Systems and Control Engineering-2009-Ruan-135-47sharanmechОценок пока нет
- 2 09 ContactДокумент16 страниц2 09 ContactsharanmechОценок пока нет
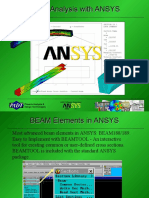
- Beam Analysis With ANSYSДокумент10 страницBeam Analysis With ANSYSsharanmechОценок пока нет
- Lab Manual AnsysДокумент232 страницыLab Manual AnsyssharanmechОценок пока нет
- Automatic Control For Mechanical EngineersДокумент176 страницAutomatic Control For Mechanical EngineersLuigui EspinosaОценок пока нет
- Modeling and Response Prediction in Performance-Based Seismic Evaluation: Case Studies of Instrumented Steel Moment-Frame BuildingsДокумент33 страницыModeling and Response Prediction in Performance-Based Seismic Evaluation: Case Studies of Instrumented Steel Moment-Frame BuildingsAshish ɐʇoʞdɐsОценок пока нет
- Laboratory Activity 5 Systems of Nonlinear Equations DumlaoДокумент6 страницLaboratory Activity 5 Systems of Nonlinear Equations DumlaoKile Kristoffer Varquez TulangОценок пока нет
- David Yeh Thesis Single SidedДокумент182 страницыDavid Yeh Thesis Single SidedrenanzsОценок пока нет
- Introduction To Finite Element Methods, 1/e: Book Information Sheet Book Information SheetДокумент2 страницыIntroduction To Finite Element Methods, 1/e: Book Information Sheet Book Information SheetVaibhavОценок пока нет
- Differential Equations (MATH313) : Basic ConceptsДокумент12 страницDifferential Equations (MATH313) : Basic ConceptsPaul Santos NonatОценок пока нет
- Lec 01 ODE PDFДокумент18 страницLec 01 ODE PDFMustafa El-ArabyОценок пока нет
- Optimization Techniques 1. Least SquaresДокумент17 страницOptimization Techniques 1. Least SquaresKhalil UllahОценок пока нет
- Chaos in Electronics (Part 2)Документ138 страницChaos in Electronics (Part 2)SnoopyDoopyОценок пока нет
- Computer-Controlled Mechanical Simulation of The Artificially Ventilated Human Respiratory SystemДокумент13 страницComputer-Controlled Mechanical Simulation of The Artificially Ventilated Human Respiratory SystemOancea AdrianОценок пока нет
- A New Algorithm For Solving Di Erential Equations of Lane Emden TypeДокумент24 страницыA New Algorithm For Solving Di Erential Equations of Lane Emden TypeKassala HalngaОценок пока нет
- Marc/Mentat DocumentationДокумент76 страницMarc/Mentat Documentationبلقاسم جلاليОценок пока нет
- Find The Solution of 36 + 10u If (T 0) 3e Using The Method of Separation of VariablesДокумент3 страницыFind The Solution of 36 + 10u If (T 0) 3e Using The Method of Separation of VariablesMîån ÅbdûllãhОценок пока нет
- Himmelblau MechanicalДокумент1 страницаHimmelblau Mechanicalvasucristal100% (1)
- Session 02 C1T2 Phenomena of Nonlinear VibrationДокумент6 страницSession 02 C1T2 Phenomena of Nonlinear VibrationsandipОценок пока нет
- C407X 13Документ19 страницC407X 13nigel agrippaОценок пока нет
- Nonlinear Regression: What Is Nonlinear Model?Документ19 страницNonlinear Regression: What Is Nonlinear Model?nagatopein6Оценок пока нет
- Scheme of Work S4.S5.S6 ECONOMICSДокумент41 страницаScheme of Work S4.S5.S6 ECONOMICSNdayishimiye Raymond83% (6)
- TheoryofnonlinearacousticsinfluidsДокумент290 страницTheoryofnonlinearacousticsinfluidsRodrigo Noguerol Correa100% (1)
- Ph.D. Thesis - OHAMДокумент99 страницPh.D. Thesis - OHAMManzoor HussainОценок пока нет
- MSC Nastran 2004 Reference ManualДокумент1 008 страницMSC Nastran 2004 Reference ManualDon100% (1)
- Varum 2017 OpenSees Days EuropeДокумент160 страницVarum 2017 OpenSees Days EuropeRober Waldir Quispe UlloaОценок пока нет
- Success Story Uni HD - BASFДокумент1 страницаSuccess Story Uni HD - BASFKanjakha PalОценок пока нет
- 00 Computer-Aided Computation For Chemical Engineers PDFДокумент30 страниц00 Computer-Aided Computation For Chemical Engineers PDFAugusto De La Cruz CamayoОценок пока нет
- UniSim Design Dynamic Modeling Reference GuideДокумент226 страницUniSim Design Dynamic Modeling Reference Guideapi-3750488Оценок пока нет
- Article 23Документ9 страницArticle 23Darwin AlvaradoОценок пока нет
- T Logic - Retrospective and ExtensionДокумент11 страницT Logic - Retrospective and ExtensionshubhrajОценок пока нет
- Blow UpДокумент6 страницBlow UpIrfan AliОценок пока нет
- Bequette 1 Y2Документ25 страницBequette 1 Y2Kami JaraОценок пока нет