Академический Документы
Профессиональный Документы
Культура Документы
ConsistentGlobalStates DS93
Загружено:
Antonio Ribeiro Alves JúniorИсходное описание:
Оригинальное название
Авторское право
Доступные форматы
Поделиться этим документом
Поделиться или встроить документ
Этот документ был вам полезен?
Это неприемлемый материал?
Пожаловаться на этот документАвторское право:
Доступные форматы
ConsistentGlobalStates DS93
Загружено:
Antonio Ribeiro Alves JúniorАвторское право:
Доступные форматы
Consistent Global States of Distributed Systems: Fundamental Concepts and Mechanisms
Ozalp Babao glu
Keith Marzullo
Technical Report UBLCS-93-1 January 1993
CM
Laboratory for Computer Science University of Bologna Piazza di Porta S. Donato, 5 40127 Bologna (Italy)
The University of Bologna Laboratory for Computer Science Research Technical Reports are available via anonymous FTP from the area ftp.cs.unibo.it:/pub/TR/UBLCS in compressed PostScript format. Abstracts are available from the same host in the directory /pub/TR/ABSTRACTS in plain text format. All local authors can be reached via e-mail at the address last-name@cs.unibo.it.
UBLCS Technical Report Series
92-1 Mapping Parallel Computations onto Distributed Systems in Paralex, by O. Babaoglu, L. Alvisi, A. Amoroso and R. Davoli, January 1992. 92-2 Parallel Scientic Computing in Distributed Systems: The Paralex Approach, by L. Alvisi, A. Amoroso, O. Babaoglu, A. Baronio, R. Davoli and L. A. Giachini, February 1992. 92-3 Run-time Support for Dynamic Load Balancing and Debugging in Paralex, by O. Babaoglu, L. Alvisi, S. Amoroso, R. Davoli, L. A. Giachini, September 1992. 92-4 Paralex: An Environment for Parallel Programming in Distributed Systems, by O. Babaoglu, L. Alvisi, S. Amoroso, R. Davoli, L. A. Giachini, October 1992. 93-1 Consistent Global States of Distributed Systems: Fundamental Concepts and Mechanism, by O. Babaoglu and K. Marzullo, January 1993. 93-2 Understanding Non-Blocking Atomic Commitment, by O. Babaoglu and S. Toueg, January 1993.
Consistent Global States of Distributed Systems: Fundamental Concepts and Mechanisms
Ozalp Babaoglu1 Keith Marzullo2
Technical Report UBLCS-93-1 January 1993
Abstract Many important problems in distributed computing admit solutions that contain a phase where some global property needs to be detected. This subproblem can be seen as an instance of the Global Predicate Evaluation (GPE) problem where the objective is to establish the truth of a Boolean expression whose variables may refer to the global system state. Given the uncertainties in asynchronous distributed systems that arise from communication delays and relative speeds of computations, the formulation and solution of GPE reveal most of the subtleties in global reasoning with imperfect information. In this paper, we use GPE as a canonical problem in order to survey concepts and mechanisms that are useful in understanding global states of distributed computations. We illustrate the utility of the developed techniques by examining distributed deadlock detection and distributed debugging as two instances of GPE.
1. Department of Mathematics, University of Bologna, Piazza Porta S. Donato 5, 40127 Bologna, Italy. This author was supported in part by the Commission of European Communities under ESPRIT Programme Basic Research Project 6360 (BROADCAST), Hewlett-Packard of Italy and the Italian Ministry of University, Research and Technology. 2. Department of Computer Science, 4130 Upson Hall, Cornell University, Ithaca, New York 14853 USA. This author was supported in part by the Defense Advanced Research Projects Agency (DoD) under NASA Ames grant number NAG 2593, and by grants from IBM and Siemens. The views, opinions, and ndings contained in this report are those of the authors and should not be construed as an ofcial Department of Defense position, policy, or decision.
1 Introduction
Introduction
A large class of problems in distributed computing can be cast as executing some notication or reaction when the state of the system satises a particular condition. Examples of such problems include monitoring and debugging, detection of particular states such as deadlock and termination, and dynamic adaptation of a programs conguration such as for load balancing. Thus, the ability to construct a global state and evaluate a predicate over such a state constitutes the core of solutions to many problems in distributed computing. The global state of a distributed system is the union of the states of the individual processes. Given that the processes of a distributed system do not share memory but instead communicate solely through the exchange of messages, a process that wishes to construct a global state must infer the remote components of that state through message exchanges. Thus, a fundamental problem in distributed computing is to ensure that a global state constructed in this manner is meaningful. In asynchronous distributed systems, a global state obtained through remote observations could be obsolete, incomplete, or inconsistent. Informally, a global state is inconsistent if it could never have been constructed by an idealized observer that is external to the system. It should be clear that uncertainties in message delays and in relative speeds at which local computations proceed prevent a process from drawing conclusions about the instantaneous global state of the system to which it belongs. While simply increasing the frequency of communication may be effective in making local views of a global state more current and more complete, it is not sufcient for guaranteeing that the global state is consistent. Ensuring the consistency of a constructed global state requires us to reason about both the order in which messages are observed by a process as well as the information contained in the messages. For a large class of problems, consistency turns out to be an appropriate formalization of the notion that global reasoning with local information is meaningful. Another source of difculty in distributed systems arises when separate processes independently construct global states. The variability in message delays could lead to these separate processes constructing different global states for the same computation. Even though each such global state may be consistent and the processes may be evaluating the same predicate, the different processes may execute conicting reactions. This relativistic effect is inherent to all distributed computations and limits the class of system properties that can be effectively detected. In this paper, we formalize and expand the above concepts in the context of an abstract problem called Global Predicate Evaluation (GPE). The goal of GPE is to determine whether the global state of the system satises some predicate . Global predicates are constructed so as to encode system properties of interest in terms of state variables. Examples of distributed system problems where the relevant properties can be encoded as global predicates include deadlock detection, termination detection, token loss detection, unreachable storage (garbage) collection, checkpointing and restarting, debugging, and in general, monitoring and reconguration. In this sense, a solution to GPE can be seen as the core of a generic solution for all these problems; what remains to be done is the formulation of the appropriate predicate and the construction of reactions or notications to be executed when the predicate is satised. We begin by dening a formal model for asynchronous distributed systems and distributed computations. We then examine two different strategies for solving GPE. The rst strategy, introduced in Section 5, and rened in Section 13, is based on a monitor process
UBLCS-93-1
2 Asynchronous Distributed Systems
that actively interrogates the rest of the system in order to construct the global state. In Section 6 we give a formal denition for consistency of global states. The alternative strategy, discussed in Section 7, has the monitor passively observe the system in order to construct its global states. Sections 8 13 introduce a series of concepts and mechanisms necessary for making the two strategies work efciently. In Section 14 we identify properties that global predicates must satisfy in order to solve practical problems using GPE. In Section 15 we address the issue of multiple monitors observing the same computation. We illustrate the utility of the underlying concepts and mechanisms by applying them to deadlock detection and to debugging in distributed systems.
Asynchronous Distributed Systems
A distributed system is a collection of sequential processes p1 ; p2; . . . ; pn and a network capable of implementing unidirectional communication channels between pairs of processes for message exchange. Channels are reliable but may deliver messages out of order. We assume that every process can communicate with every other process, perhaps through intermediary processes. In other words, the communication network is assumed to be strongly connected (but not necessarily completely connected). In dening the properties of a distributed system, we would like to make the weakest set of assumptions possible. Doing so will enable us to establish upper bounds on the costs of solving problems in distributed systems. More specically, if there exists a solution to a problem in this weakest model with some cost , then there is a solution to the same problem with a cost no greater than in any distributed system. The weakest possible model for a distributed system is called an asynchronous system and is characterized by the following properties: there exist no bounds on the relative speeds of processes and there exist no bounds on message delays. Asynchronous systems rule out the possibility of processes maintaining synchronized local clocks [18,8] or reasoning based on global real-time. Communication remains the only possible mechanism for synchronization in such systems. In addition to their theoretical interest as noted above, asynchronous distributed systems may also be realistic models for actual systems. It is often the case that physical components from which we construct distributed systems are synchronous. In other words, the relative speeds of processors and message delays over network links making up a distributed system can be bounded. When, however, layers of software are introduced to multiplex these physical resources to create abstractions such as processes and (reliable) communication channels, the resulting system may be better characterized as asynchronous.
Distributed Computations
Informally, a distributed computation describes the execution of a distributed program by a collection of processes. The activity of each sequential process is modeled as executing a sequence of events. An event may be either internal to a process and cause only a local state change, or it may involve communication with another process. Without loss of generality, we assume that communication is accomplished through the events send(m) and receive(m) that match based on the message identier m. In other words, even if several processes
UBLCS-93-1
Distributed Computations
send the same data value to the same process, the messages themselves will be unique.3 Informally, the event send(m) enqueues message m on an outgoing channel for transmission to the destination process. The event receive(m), on the other hand, corresponds to the act of dequeuing message m from an incoming channel at the destination process. Clearly, for event receive(m) to occur at process p, message m must have arrived at p and p must have declared its willingness to receive a message. Otherwise, either the message is delayed (because the process is not ready) or the process is delayed (because the message has not arrived). Note that this message passing view of communication at the event level may be quite different from those of higher system layers. Remote communication at the programming language level may be accomplished through any number of paradigms including remote procedure calls [4], broadcasts [12], distributed transactions [19], distributed objects [20] or distributed shared memory [21]. At the level we observe distributed computations, however, all such high-level communication boil down to generating matching send and receive events at pairs of processes. The local history of process pi during the computation is a (possibly innite) sequence of events hi = e1 e2 . . .. This labeling of the events of process pi where e1 is the rst event exei i i cuted, e2 is the second event executed, etc. is called the canonical enumeration and corresponds i to the total order imposed by the sequential execution on the local events. Let hk = e1 e2 . . . ek i i i i denote an initial prex of local history hi containing the rst k events. We dene h0 to be the i hn containing empty sequence. The global history of the computation is a set H = h1 all of its events.4 Note that a global history does not specify any relative timing between events. In an asynchronous distributed system where no global time frame exists, events of a computation can be ordered only based on the notion of cause-and-effect. In other words, two events are constrained to occur in a certain order only if the occurrence of the rst may affect the outcome of the second. This in turn implies that information ows from the rst event to the second. In an asynchronous system, information may ow from one event to another either because the two events are of the same process, and thus may access the same local state, or because the two events are of different processes and they correspond to the exchange of a message. We can formalize these ideas by dening a binary relation ! dened over events such that [17]: 1. If ek ; e` 2 hi and k < `, then ek !e` , i i i i 2. If ei = send(m) and ej = receive(m), then ei !ej , 3. If e!e0 and e0 !e00, then e!e00 . As dened, this relation effectively captures our intuitive notion of cause-and-effect in that e!e0 if and only if e causally precedes e0 .5 Note that only in the case of matching sendreceive events is the cause-and-effect relationship certain. In general, the only conclusion that can be drawn from e!e0 is that the mere occurrence of e0 and its outcome may have been inuenced by event e.
3. For nite computations, this can be easily accomplished by adding the process index and a sequence number to the data value to construct the message identier. 4. Sometimes we are interested in local histories as sets rather than sequences of events. Since all events of a computation have unique labels in the canonical enumeration, hi as a set contains exactly the same events as hi as a sequence. We use the same symbol to denote both when the appropriate interpretation is clear from context. 5. While e may causally affect e0 , or, e0 occurs in the causal context of e [28] are equivalent interpretations of this relation, we prefer not to interpret it as e happens before e0 [17] because of the real-time connotation.
UBLCS-93-1
4 Global States, Cuts and Runs
p1
e1 1
req
e2 1
req
e3 1
resp
e4 1
e5 1
resp
e6 1
p2
e2 2 e1 2
req
req
e3 2
p3
e1 3
e2 e3 e4 3 3 3
e5 3
e6 3
Figure 1. Space-Time Diagram Representation of a Distributed Computation
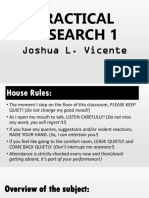
Certain events of the global history may be causally unrelated. In other words, it is possible that for some e and e0 , neither e!e0 nor e0 !e. We call such events concurrent and write eke0 . Formally, a distributed computation is a partially ordered set (poset) dened by the pair (H; !). Note that all events are labeled with their canonical enumeration, and in the case of communication events, they also contain the unique message identier. Thus, the total ordering of events for each process as well as the send-receive matchings are implicit in H . It is common to depict distributed computations using an equivalent graphical representation called a space-time diagram. Figure 1 illustrates such a diagram where the horizontal lines represent execution of processes, with time progressing from left to right. An arrow from one process to another represents a message being sent, with the send event at the base of the arrow and the corresponding receive event at the head of the arrow. Internal events have no arrows associated with them. Given this graphical representation, it is easy to verify if two events are causally related: if a path can be traced from one event to the other proceeding left-to-right along the horizontal lines and in the sense of the arrows, then they are related; otherwise they are concurrent. For example, in the gure e1 !e6 but e2 ke6 . 2 3 2 3
Global States, Cuts and Runs
k Let i denote the local state of process pi immediately after having executed event ek and let i 0 i be its initial state before any events are executed. In general, the local state of a process may include information such as the values of local variables and the sequences of messages sent and received over the various channels incident to the process. The global state of a distributed computation is an n-tuple of local states = ( 1 ; . . . ; n ), one for each process.6
6. We can dene global states without referring to channel states since they can always be encoded as part of the process local states. We discuss explicit representation of channel states in Section 13.
UBLCS-93-1
Monitoring Distributed Computations
p1
e1 1
req
e2 1
req
e3 1
resp
e4 1
e5 1
resp
e6 1
p2
e2 2 e1 2
req
req
e3 2
p3
e1 3
e2 e3 e4 3 3 3
e5 3
e6 3
C0
Figure 2. Cuts of a Distributed Computation
A cut of a distributed computation is a subset C of its global history H and contains an initial prex of each of the local histories. We can specify such a cut C = hc1 hcn through the n 1 tuple of natural numbers (c1 ; . . . ; cn) corresponding to the index of the last event included for each process. The set of last events (ec1 ; . . . ; ecn ) included in cut (c1 ; . . . ; cn) is called the n 1 frontier of the cut. Clearly, each cut dened by (c1 ; . . . ; cn) has a corresponding global state c c which is ( 11 ; . . . ; nn ). As shown in Figure 2, a cut has a natural graphical interpretation as a partitioning of the space-time diagram along the time axis. The gure illustrates two cuts C and C 0 corresponding to the tuples (5; 2; 4) and (3; 2; 6), respectively. Even though a distributed computation is a partially ordered set of events, in an actual execution, all events, including those at different processes, occur in some total order.7 To be able to reason about executions in distributed systems, we introduce the notion of a run. A run of a distributed computation is total ordering R that includes all of the events in the global history and that is consistent with each local history. In other words, for each process pi , the events of pi appear in R in the same order that they appear in hi . Note that a run need not correspond to any possible execution and a single distributed computation may have many runs, each corresponding to a different execution.
Monitoring Distributed Computations
Given the above notation and terminology, GPE can be stated as evaluating a predicate that is a function of the global state of a distributed system. For the time being, we will assume that a single process called the monitor is responsible for evaluating . Let p0 be
7. If two events actually do occur at the same real-time, we can arbitrarily say that the event of the process with the smaller index occurs before the event of the larger-index process.
UBLCS-93-1
Monitoring Distributed Computations
this process which may be one of p1 ; . . . ; pn or may be external to the computation (but not the system). In this special case, where there is a single monitor, solving GPE reduces to p0 constructing a global state of the computation (to which is applied). For simplicity of exposition, we assume that events executed on behalf of monitoring are external to the underlying computation and do not alter the canonical enumeration of its events. In the rst strategy we pursue for constructing global states, the monitor p0 takes on an active role and sends each process a state enquiry message. Upon the receipt of such a message, pi replies with its current local state i . When all n processes have replied, p0 can construct the global state ( 1; . . . ; n). Note that the positions in the process local histories that state enquiry messages are received effectively denes a cut. The global state constructed by p0 is the one corresponding to this cut. Given that the monitor process is part of the distributed system and is subject to the same uncertainties as any other process, the simple-minded approach sketched above may lead to predicate values that are not meaningful. To illustrate the problems that can arise, consider a distributed system composed of servers providing remote services and clients that invoke them. In order to satisfy a request, a server may invoke other services (and thus act as a client). Clients and servers interact through remote procedure callsafter issuing a request for service, the client remains blocked until it receives the response from the server. The computation depicted in Figure 1 could correspond to this interaction if we interpret messages labeled req as requests for service and those labeled resp as responses. Clearly, such a system can deadlock. Thus, it is important to be able to detect when the state of this system includes deadlocked processes. One possibility for detecting deadlocks in the above system is as follows. Server processes maintain local states containing the names of clients from which they received requests but to which they have not yet responded. The relevant aspects of the global state of this system can be summarized through a waits-for+ graph (WFG+ ) where the nodes correspond to processes and the edges model blocking. In this graph, an edge is drawn from node i to node j if pj has received a request from pi to which it has not yet responded. Note that WFG+ can be constructed solely on the basis of local states. It is well known that a cycle in WFG+ is a sufcient condition to characterize deadlock in this system [11]. The nodes of the cycle are exactly those processes involved in the deadlock. Thus, the predicate = WFG+ contains a cycle is one possibility for deadlock detection.8 Let us see what might happen if process p0 monitors the computation of Figure 1 as outlined above. Suppose that the state enquiry messages of p0 are received by the three application processes at the points corresponding to cut C 0 of Figure 2. In other words, 3 2 6 processes p1 , p2 and p3 report local states 1 , 2 and 3 , respectively. The WFG+ constructed by p0 for this global state will have edges (1; 3), (2; 1) and (3; 2) forming a cycle. Thus, p0 will report a deadlock involving all three processes. An omniscient external observer of the computation in Figure 1, on the other hand, would conclude that at no time is the system in a deadlock state. The condition detected by p0 above is called a ghost deadlock in that it is ctitious. While every cut of a distributed computation corresponds to a global state, only certain cuts correspond to global states that could have taken place during a run. Cut C of Figure 2 represents such a global state. On
8. Note that dened as a cycle in WFG+ characterizes a stronger condition than deadlock in the sense that implies deadlock but not vice versa. If, however, processes can receive and record requests while being blocked, then a deadlocked system will eventually satisfy .
UBLCS-93-1
Consistency
the other hand, cut C 0 constructed by p0 corresponds to a global state that could never occur since process p3 is in a state reecting the receipt of a request from process p1 that p1 has no record of having sent. Predicates applied to cuts such as C 0 can lead to incorrect conclusions about the system state. We return to solving the GPE problem through active monitoring of distributed computations in Section 13 after understanding why the above approach failed.
Consistency
Causal precedence happens to be the appropriate formalism for distinguishing the two classes of cuts exemplied by C and C 0. A cut C is consistent if for all events e and e0
(e 2 C ) ^ (e0!e) ) e0 2 C:
In other words, a consistent cut is left closed under the causal precedence relation. In its graphical representation, verifying the consistency of a cut becomes easy: if all arrows that intersect the cut have their bases to the left and heads to the right of it, then the cut is consistent; otherwise it is inconsistent. According to this denition, cut C of Figure 2 is consistent while cut C 0 is inconsistent. A consistent global state is one corresponding to a consistent cut. These denitions correspond exactly to the intuition that consistent global states are those that could occur during a run in the sense that they could be constructed by an idealized observer external to the system. We can now explain the ghost deadlock detected by p0 in the previous section as resulting from the evaluation of in an inconsistent global state. Consistent cuts (and consistent global states) are fundamental towards understanding asynchronous distributed computing. Just as a scalar time value denotes a particular instant during a sequential computation, the frontier of a consistent cut establishes an instant during a distributed computation. Similarly, notions such as before and after that are dened with respect to a given time in sequential systems have to be interpreted with respect to consistent cuts in distributed system: an event e is before (after) a cut C if e is to the left (right) of the frontier of C . Predicate values are meaningful only when evaluated in consistent global states since these characterize exactly the states that could have taken place during an execution. A run R is said to be consistent if for all events, e!e0 implies that e appears before e0 in R. In other words, the total order imposed by R on the events is an extension of the partial order dened by causal precedence. It is easy to see that a run R = e1 e2 . . . results in a sequence 0 0 of global states 0 1 2 . . . where 0 denotes the initial global state ( 1 ; . . . ; n ). If the run is consistent, then the global states in the sequence will all be consistent as well. We will use the term run to refer to both the sequence of events and the sequence of resulting global states. Each (consistent) global state i of the run is obtained from the previous state i?1 by some process executing the single event ei . For two such (consistent) global states of run R, we say that i?1 leads to i in R. Let ;R denote the transitive closure of the leads-to relation in a given run R. We say that 0 is reachable from in run R if and only if ;R 0 . We drop the run subscript if there exists some run in which 0 is reachable from . The set of all consistent global states of a computation along with the leads-to relation denes a lattice. The lattice consists of n orthogonal axes, with one axis for each process. Let k1 ...kn be a shorthand for the global state ( k1 ; . . . ; kn ) and let k1 + + kn be its level. Figure 3 n 1
UBLCS-93-1
Consistency
00 10 11 21 31 41 42 43 53 63 64 65 54 55 44 45 32 33 34 35 22 23 24 12 13 14 01 02 03 04
p1
e1 1
e2 1
e3 1
e4 1
e5 e6 1 1
p2
e1 2
e2 e3 2 2
e4 2
e5 2
Figure 3. A Distributed Computation and the Lattice of its Global States
UBLCS-93-1
7 Observing Distributed Computations
illustrates a distributed computation of two processes and the corresponding global state lattice. Note that every global state is reachable from the initial global state 00 . A path in the lattice is a sequence of global states of increasing level (in the gure, downwards) where the level between any two successive elements differs by one. Each such path corresponds to a consistent run of the computation. The run is said to pass through the global states included in the path. For the example illustrated in Figure 3, one possible run may pass through the sequence of global states
00 01 11 21 31 32 42 43 44 54 64 65
Note that one might be tempted to identify the run corresponding to the actual execution of the computation. As we argued earlier, in an asynchronous distributed system, this is impossible to achieve from within the system. Only an omniscient external observer will be able to identify the sequence of global states that the execution passed through.
Observing Distributed Computations
Let us consider an alternative strategy for the monitor process p0 in constructing global states to be used in predicate evaluation based on a reactive architecture [13]. In this approach, p0 will assume a passive role in that it will not send any messages of its own. The application processes, however, will be modied slightly so that whenever they execute an event, they notify p0 by sending it a message describing the event.9 As before, we assume that monitoring does not generate any new events in that the send to p0 for notication coincides with the event it is notifying. In this manner, the monitor process constructs an observation of the underlying distributed computation as the sequence of events corresponding to the order in which the notication messages arrive [14]. We note certain properties of observations as constructed above. First, due to the variability of the notication message delays, a single run of a distributed computation may have different observations at different monitors. This is the so-called relativistic effect of distributed computing to which we return in Section 15. Second, an observation can correspond to a consistent run, an inconsistent run or no run at all since events from the same process may be observed in an order different from their local history. A consistent observation is one that corresponds to a consistent run. To illustrate these points, consider the following (consistent) run of the computation in Figure 1:
R = e1 e1 e2 e1 e3 e4 e2 e2 e5 e3 e4 e5 e6 e3 e6 3 1 3 2 3 3 2 1 3 1 1 1 3 2 1 All of the following are possible observations of R: O1 = e1 e1 e1 e2 e4 e2 e2 e3 e3 e4 e5 . . . 2 1 3 3 3 1 2 3 1 1 3 O2 = e1 e1 e1 e2 e2 e3 e4 e3 e2 e5 e6 . . . 1 3 2 3 1 3 3 1 2 3 3 O3 = e1 e1 e1 e2 e2 e3 e3 e4 e4 e2 e5 . . . 3 2 1 1 3 3 1 3 1 2 1
9. In general, the application processes need to inform p0 only when they execute an event that is relevant to . k A local event ek is said to be relevant to predicate if the value of evaluated in a global state (. . . ; i ; . . .) could i k ?1 be different from that evaluated in (. . . ; i ; . . .). For example, in the client-server computation of Figure 1, the only events relevant to deadlock detection are the sending/receiving of request and response messages since only these can change the state of the WFG+ .
UBLCS-93-1
10
7 Observing Distributed Computations
Given our asynchronous distributed system model where communication channels need not preserve message order, any permutation of run R is a possible observation of it. Not all observations, however, need be meaningful with respect to the run that produced them. For example, among those indicated above, observation O1 does not even correspond to a run since events of process p3 do not represent an initial prex of its local history (e4 3 appears before event e3 ). Observation O2 , on the hand, corresponds to an inconsistent run. 3 3 2 6 In fact, the global state constructed by p0 at the end of observation O2 would be ( 1 ; 2 ; 3 ), which is exactly the global state dened by cut C 0 of Figure 2 resulting in the detection of a ghost deadlock. Finally, O3 is a consistent observation and leads to the same global state as that of cut C in Figure 2. It is the possibility of messages being reordered by channels that leads to undesirable observations such as O1 . We can restore order to messages between pairs of processes by dening a delivery rule for deciding when received messages are to be presented to the application process. We call the primitive invoked by the application deliver to distinguish it from receive, which remains hidden within the delivery rule and does not appear in the local history of the process. Communication from process pi to pj is said to satisfy First-In-First-Out (FIFO) delivery if for all messages m and m0 FIFO Delivery: sendi (m)!sendi (m0) ) deliverj (m)!deliverj (m0):10 In other words, FIFO delivery prevents one message overtaking an earlier message sent by the same process. For each source-destination pair, FIFO delivery can be implemented over non-FIFO channels simply by having the source process add a sequence number to its messages and by using a delivery rule at the destination that presents messages in an order corresponding to the sequence numbers. While FIFO delivery is sufcient to guarantee that observations correspond to runs, it is not sufcient to guarantee consistent observations. To pursue this approach for solving the GPE problem where is evaluated in global states constructed from observations, we need to devise a mechanism that ensures their consistency. We proceed by devising a simple mechanism and rening it as we relax assumptions. Initially, assume that all processes have access to a global real-time clock and that all message delays are bounded by . This is clearly not an asynchronous system but will serve as a starting point. Let RC(e) denote the value of the global clock when event e is executed. When a process noties p0 of some local event e, it includes RC(e) in the notication message as a timestamp. The delivery rule employed by p0 is the following: DR1: At time t, deliver all received messages with timestamps up to t ? in increasing timestamp order. To see why an observation O constructed by p0 using DR1 is guaranteed to be consistent, rst note that an event e is observed before event e0 if and only if RC(e) < RC(e0 ).11 This is true because messages are delivered in increasing timestamp order and delivering only messages with timestamps up to time t ? ensures that no future message can arrive with a timestamp smaller than any of the messages already delivered. Since the observation coincides with the delivery order, O is consistent if and only if Clock Condition: e!e0 ) RC(e) < RC(e0). This condition is certainly satised when timestamps are generated using the global real-time clock. As it turns out, the clock condition can be satised without any assumptions
10. Subscripts identify the process executing the event. 11. Again, we can break ties due to simultaneous events based on process indexes.
UBLCS-93-1
11
8 Logical Clocks
p1
p2
5 1 6
p3
2 3 4
Figure 4. Logical Clocks
in an asynchronous system.
Logical Clocks
In an asynchronous system where no global real-time clock can exist, we can devise a simple clock mechanism for timing such that event orderings based on increasing clock values are guaranteed to be consistent with causal precedence. In other words, the clock condition can be satised in an asynchronous system. For many applications, including the one above, any mechanism satisfying the clock condition can be shown to be sufcient for using the values produced by it as if they were produced by a global real-time clock [27]. The mechanism works as follows. Each process maintains a local variable LC called its logical clock that maps events to the positive natural numbers [17]. The value of the logical clock when event ei is executed by process pi is denoted LC(ei ). We use LC to refer to the current logical clock value of a process that is implicit from context. Each message m that is sent contains a timestamp TS(m) which is the logical clock value associated with the sending event. Before any events are executed, all processes initialize their logical clocks to zero. The following update rules dene how the logical clock is modied by pi with the occurrence of each new event ei : LC(ei ) :=
LC + 1 if ei is an internal or send event maxfLC; TS(m)g + 1 if ei = receive(m)
In other words, when a receive event is executed, the logical clock is updated to be greater than both the previous local value and the timestamp of the incoming message. Otherwise (i.e., an internal or send event is executed), the logical clock is simply incremented. Figure 4 illustrates the logical clock values that result when these rules are applied to the computation of Figure 1.
UBLCS-93-1
12
8 Logical Clocks
Note that the above construction produces logical clock values that are increasing with respect to causal precedence. It is easy to verify that for any two events where e!e0 , the logical clocks associated with them are such that LC(e) < LC(e0 ). Thus, logical clocks satisfy the clock condition of the previous section.12 Now let us return to the goal at hand, which is constructing consistent observations in asynchronous systems. In the previous section, we argued that delivery rule DR1 lead to consistent observations as long as timestamps satised the clock condition. We have just shown that logical clocks indeed satisfy the clock condition and are realizable in asynchronous systems. Thus, we should be able to use logical clocks to construct consistent observations in asynchronous systems. Uses of logical clocks in many other contexts are discussed in [29]. Consider a delivery rule where those messages that are delivered, are delivered in increasing (logical clock) timestamp order, with ties being broken as usual based on process index. Applying this rule to the example of Figure 4, p0 would construct the observation
e1 e1 e1 e2 e2 e3 e3 e4 e4 e2 e5 e5 e3 e6 e6 1 2 3 1 3 3 1 3 1 2 3 1 2 1 3
which is indeed consistent. Unfortunately, the delivery rule as stated lacks liveness since, without a bound on message delays (and a real-time clock to measure it), no message will ever be delivered for fear of receiving a later message with a smaller timestamp. This is because logical clocks, when used as a timing mechanism, lack what we call the gap-detection property: Gap-Detection: Given two events e and e0 along with their clock values LC(e) and LC(e0) where LC(e) < LC(e0 ), determine whether some other event e00 exists such that LC(e) < LC(e00) < LC(e0 ). It is this property that is needed to guarantee liveness for the delivery rule and can be achieved with logical clocks in an asynchronous system only if we exploit information in addition to the clock values. One possibility is based on using FIFO communication between all processes and p0 . As usual, all messages (including those sent to p0 ) carry the logical clock value of the send event as a timestamp. Since each logical clock is monotone increasing and FIFO delivery preserves order among messages sent by a single process, when p0 receives a message m from process pi with timestamp TS(m), it is certain that no other message m0 can arrive from pi such that TS(m0) TS(m). A message m received by process p is called stable if no future messages with timestamps smaller than TS(m) can be received by p. Given FIFO communication between all processes and p0 , stability of message m at p0 can be guaranteed when p0 has received at least one message from all other processes with a timestamp greater than TS(m). This idea leads to the following delivery rule for constructing consistent observations when logical clocks are used for timestamps: DR2: Deliver all received messages that are stable at p0 in increasing timestamp order.13 Note that real-time clocks lack the gap-detection property as well. The assumption, however, that message delays are bounded by was sufcient to devise a simple stability check in delivery rule DR1: at time t, all received messages with timestamps smaller than t ? are guaranteed to be stable.
12. Note that logical clocks would continue to satisfy the clock condition with any arbitrary positive integer (rather than one) as the increment value of the update rules. 13. Even this delivery rule may lack liveness if some processes do not communicate with p0 after a certain point. Liveness can be obtained by the monitor p0 requesting an acknowledgement from all processes to a periodic empty message [17]. These acknowledgements serve to ush out messages that may have been in the channels.
UBLCS-93-1
13
9 Causal Delivery
p1
p2 m0 p3
Figure 5. Message Delivery that is FIFO but not Causal
Causal Delivery
Recall that FIFO delivery guarantees order to be preserved among messages sent by the same process. A more general abstraction extends this ordering to all messages that are causally related, even if they are sent by different processes. The resulting property is called causal delivery and can be stated as: Causal Delivery (CD): sendi (m)!sendj (m0) ) deliverk(m)!deliverk (m0) for all messages m; m0, sending processes pi ; pj and destination process pk . In other words, in a system respecting causal delivery, a process cannot known about the existence of a message (through intermediate messages) any earlier than the event corresponding to the delivery of that message [31]. Note that having FIFO delivery between all pairs of processes is not sufcient to guarantee causal delivery. Figure 5 illustrates a computation where all deliveries (trivially) satisfy FIFO but those of p3 violate CD. The relevance of causal delivery to the construction of consistent observations is obvious: if p0 uses a delivery rule satisfying CD, then all of its observations will be consistent. The correctness of this result is an immediate consequence of the denition of CD, which coincides with that of a consistent observation. In retrospect, the two delivery rules DR1 and DR2 we developed in the previous sections are instances of CD that work under certain assumptions. What we seek is an implementation for CD that makes no assumptions beyond those of asynchronous systems.
10
Constructing the Causal Precedence Relation
Note that we have stated the gap-detection property in terms of clock values. For implementing causal delivery efciently, what is really needed is an effective procedure for deciding the following: given events e, e0 that are causally related and their clock values, does there exist some other event e00 such that e!e00 !e0 (i.e., e00 falls in the causal gap between e and e0)?
UBLCS-93-1
14
10 Constructing the Causal Precedence Relation
By delivering event notication messages in strict increasing timestamp order, rules DR1 and DR2 assume that RC(e) < RC(e0) (equivalently, LC(e) < LC(e0 )) implies e!e0 . This is a conservative assumption since timestamps generated using real-time or logical clocks only guarantee the clock condition, which is this implication in the opposite sense. Given RC(e) < RC(e0 ) (or LC(e) < LC(e0)), it may be that e causally precedes e0 or that they are concurrent. What is known for certain is that :(e0 !e). Having just received the notication of event e0 , DR1 and DR2 could unnecessarily delay its delivery even if they could predict the timestamps of all notications yet to be received. The delay would be unnecessary if there existed future notications with smaller timestamps, but they all happened to be for events concurrent with e0 . The observations of the preceding two paragraphs suggest a timing mechanism TC whereby causal precedence relations between events can be deduced from their timestamps. We strengthen the clock condition by adding an implication in the other sense to obtain: Strong Clock Condition: e!e0 TC(e) < TC(e0 ). While real-time and logical clocks are consistent with causal precedence, timing mechanism TC is said to characterize causal precedence since the entire computation can be reconstructed from a single observation containing TC as timestamps [9,34]. This is essential not only for efcient implementation of CD, but also for many other applications (e.g., distributed debugging discussed in Section 14.2) that require the entire global state lattice rather than a single path through it. 10.1 Causal Histories
A brute-force approach to satisfying the strong clock condition is to devise a timing mechanism that produces the set of all events that causally precede an event as its clock value [34]. We dene the causal history of event e in distributed computation (H; !) as the set
(e) = fe0 2 H j e0 !eg feg:
In other words, the causal history of event e is the smallest consistent cut that includes e. The projection of (e) on process pi is the set i (e) = (e)\hi . Figure 6 graphically illustrates the causal history of event e4 as the darkened segments of process local histories leading 1 towards the event. From the gure, it is easy to see that (e4 ) = fe1 ; e2 ; e3 ; e4 ; e1 ; e1 ; e2 ; e3 g. 1 1 1 1 1 2 3 3 3 In principle, maintaining causal histories is simple. Each process pi initializes local variable to be the empty set. If ei is the receive of message m by process pi from pj , then (ei ) is constructed as the union of ei , the causal history of the previous local event of pi and the causal history of the corresponding send event at pj (included in message m as its timestamp). Otherwise (ei is an internal or send event), (ei ) is the union of ei and the causal history of the previous local event. When causal histories are used as clock values, the strong clock condition can be satised if we interpret clock comparison as set inclusion. From the denition of causal histories, it follows that
e!e0
(e)
(e0 ):
In case e 6= e0 , the set inclusion above can be replaced by the simple set membership test e 2 (e0 ). The unfortunate property of causal histories that renders them impractical is that they grow rapidly.
UBLCS-93-1
15
10 Constructing the Causal Precedence Relation
p1
e1 1
req
e2 1
req
e3 1
resp
e4 1
e5 1
resp
e6 1
p2
e2 2 e1 2
req
req
e3 2
p3
e1 3
e2 e3 e4 3 3 3
e5 3
e6 3
Figure 6. Causal History of Event e4 1
10.2
Vector Clocks
The causal history mechanism proposed in the previous section can be made practical by periodically pruning segments of history that are known to be common to all events [28]. Alternatively, the causal history can be represented as a xed-dimensional vector rather than a set. The resulting growth rate will be logarithmic in the number of events rather than linear. In what follows, we pursue this approach. First, note that the projection of causal history (e) on process pi corresponds to an initial prex of the local history of pi . In other words, i (e) = hk for some unique k and, i by the canonical enumeration of events, e` 2 i (e) for all ` < k. Thus, a single natural i number is sufcient to represent the set i (e). Since (e) = 1 (e) n (e), the entire causal history can be represented by an n-dimensional vector VC(e) where for all 1 i n, the ith component is dened as VC(e) i] = k; if and only if i (e) = hk : i The resulting mechanism is known as vector clocks and has been discovered independently by many researchers in many different contexts (see [34] for a survey). In this scheme, each process pi maintains a local vector VC of natural numbers where VC(ei ) denotes the vector clock value of pi when it executes event ei . As with logical clocks, we use VC to refer to the current vector clock of a process that is implicit from context. Each process pi initializes VC to contain all zeros. All messages contain a timestamp TS(m) which is the vector clock value of ms send event. The following update rules dene how the vector clock is modied by pi with the occurrence of each new event ei : VC(ei ) i] := VC i] + 1 if ei is an internal or send event if ei VC(ei ) := maxfVC; TS(m)g VC(ei ) i] := VC i] + 1
UBLCS-93-1
= receive(m)
16
10 Constructing the Causal Precedence Relation
p1
(1,0,0)
(2,1,0)
(3,1,3) (4,1,3) (5,1,3)
(6,1,3)
p2
(1,2,4) (0,1,0) (4,3,4)
p3
(0,0,1) (1,0,2)(1,0,3)(1,0,4)
(1,0,5)
(5,1,6)
Figure 7. Vector Clocks
In other words, an internal or send event simply increments the local component of the vector clock. A receive event, on the other hand, rst updates the vector clock to be greater than (on a component-by-component basis) both the previous value and the timestamp of the incoming message, and then increments the local component. Figure 7 illustrates the vector clocks associated with the events of the distributed computation displayed in Figure 1. Given the above implementation, the j th component of the vector clock of process pi has the following operational interpretation for all j 6= i: VC(ei) j ] number of events of pj that causally precede event ei of pi :
On the other hand, VC(ei ) i] counts the number of events pi has executed up to and including ei . Equivalently, VC(ei ) i] is the ordinal position of event ei in the canonical enumeration of pi s events. From the denition of vector clocks, we can easily derive a collection of useful properties. Given two n-dimensional vectors V and V 0 of natural numbers, we dene the less than relation (written as <) between them as follows
V < V 0 (V 6= V 0) ^ (8k : 1 k n : V k] V 0 k]):
This allows us to express the strong clock condition in terms of vector clocks as Property 1 (Strong Clock Condition)
e!e0
VC(e) < VC(e0):
Note that for the above test, it is not necessary to know on which processes the two events were executed. If this information is available, causal precedence between two events can be veried through a single scalar comparison.
UBLCS-93-1
17
10 Constructing the Causal Precedence Relation
Property 2 (Simple Strong Clock Condition) Given event ei of process pi and event ej of process pj , where i 6= j ei !ej VC(ei ) i] VC(ej ) i]: Note that the condition VC(ei ) i] = VC(ej ) i] is possible and represents the situation where ei is the latest event of pi that causally precedes ej of pj (thus ei must be a send event). Given this version of the strong clock condition, we obtain a simple test for concurrency between events that follows directly from its denition Property 3 (Concurrent) Given event ei of process pi and event ej of process pj
ei kej (VC(ei ) i] > VC(ej ) i]) ^ (VC(ej ) j ] > VC(ei) j ]):
Consistency of cuts of a distributed computation can also be easily veried in terms of vector clocks. Events ei and ej are said to be pairwise inconsistent if they cannot belong to the frontier of the same consistent cut. In terms of vector clocks, this can be expressed as Property 4 (Pairwise Inconsistent) Event ei of process pi is pairwise inconsistent with event ej of process pj , where i 6= j , if and only if
(VC(ei ) i] < VC(ej ) i]) _ (VC(ej ) j ] < VC(ei ) j ]):
The two disjuncts characterize exactly the two possibilities for the cut to include at least one receive event without including its corresponding send event (thus making it inconsistent). While this property might appear to be equivalent to :(ei kej ) at rst sight, this is not the case; it is obviously possible for two events to be causally related and yet be pairwise consistent. We can then characterize a cut as being consistent if its frontier contains no pairwise inconsistent events. Given the denition of a cut, it sufces to check pairwise inconsistency only for those events that are in the frontier of the cut. In terms of vector clocks, the property becomes Property 5 (Consistent Cut) A cut dened by (c1 ; . . . ; cn) is consistent if and only if
8i; j : 1 i n; 1 j n : VC(ec ) i] i
i
VC(ejj ) i]:
Recall that, for all j 6= i, the vector clock component VC(ei ) j ] can be interpreted as the number of events of pj that causally precede event ei of pi . The component corresponding to the process itself, on the other hand, counts the total number of events executed by pi up to P and including ei . Let # (ei ) = ( n=1 VC(ei ) j ]) ? 1. Thus, # (ei) denotes exactly the number j of events that causally precede ei in the entire computation. Property 6 (Counting) Given event ei of process pi and its vector clock value VC(ei ), the number of events e such that e!ei (equivalently, VC(e) < VC(ei )) is given by # (ei ).
UBLCS-93-1
18
11
Implementing Causal Delivery with Vector Clocks
Finally, vector clocks supply a weak form of the gap-detection property that logical and real-time clocks do not. The following property follows directly from the vector clock update rules and the second form of the Strong Clock Condition. It can be used to determine if the causal gap between two events admits a third event. Property 7 (Weak Gap-Detection) Given event ei of process pi and event ej of process pj , if VC(ei ) k] < VC(ej ) k] for some k 6= j , then there exists an event ek such that
:(ek !ei) ^ (ek !ej ):
The property is weak in the sense that, for arbitrary processes pi ; pj and pk , we cannot conclude if the three events form a causal chain ei !ek !ej . For the special case i = k, however, the property indeed identies the sufcient condition to make such a conclusion.
11
Implementing Causal Delivery with Vector Clocks
The weak gap-detection property of the previous section can be exploited to efciently implement causal delivery using vector clocks. Assume that processes increment the local component of their vector clocks only for events that are notied to the monitor.14 As usual, each message m carries a timestamp TS(m) which is the vector clock value of the event being notied by m. All messages that have been received but not yet delivered by the monitor process p0 are maintained in a set M, initially empty. A message m 2 M from process pj is deliverable as soon as p0 can verify that there are no other messages (neither in M nor in the network) whose sending causally precede that of m. Let m0 be the last message delivered from process pk , where k 6= j . Before message m of process pj can be delivered, p0 must verify two conditions: 1. there is no earlier message from pj that is undelivered, and 2. there is no undelivered message m00 from pk such that
send(m0 )!send(m00)!send(m); 8k 6= j:
The rst condition holds if exactly TS(m) j ] ? 1 messages have already been delivered from pj . To verify the second condition, we can use the special case of weak gap-detection where i = k and ei = sendk (m0 ), ek = sendk (m00) and ej = sendj (m). Since the two events sendk (m0) and sendk (m00) both occur at process pk , Property 7 can be written as
sendk (m0 )!sendk (m00)!sendj (m): Thus, no undelivered message m00 exists if TS(m0) k] TS(m) k], for all k. These tests can be efciently implemented if p0 maintains an array D 1 . . . n] of counters, initially all zeros, such that counter D i] contains TS(mi ) i] where mi is the last message that has been delivered from process pi . The delivery rule then becomes:
14. Equivalently, processes send a notication message to the monitor for all of their events.
(Weak Gap-Detection) If TS(m0) k] < TS(m) k] for some k such that
6= j , then there exists event sendk (m00)
UBLCS-93-1
19
11
Implementing Causal Delivery with Vector Clocks
p0
0,0]
1,0] 1,1] 2,1]
p1
(0,0) (1,0)
m m0
m00
(1,1) (2,1)
p2
(0,0)
(1,0) (1,1)
Figure 8. Causal Delivery Using Vector Clocks
DR3: (Causal Delivery) Deliver message m from process pj as soon as both of the following conditions are satised
D j] = D k]
TS(m) j ] ? 1
TS(m) k]; 8k 6= j:
When p0 delivers m, array D is updated by setting D j ] to TS(m) j ]. Figure 8 illustrates the application of this delivery rule by p0 in a sample computation. The events of p1 and p2 are annotated with the vector clock values while those of p0 indicate the values of array D. Note that the delivery of message m0 is delayed until message m has been received and delivered. Message m00, on the other hand, can be delivered as soon as it is received since p0 can verify that all causally preceding messages have been delivered. At this point, we have a complete reactive-architecture solution to the GPE problem in asynchronous distributed systems based on passive observations. The steps are as follows. Processes notify the monitor p0 of relevant events by sending it messages. The monitor uses a causal delivery rule for the notication messages to construct an observation that corresponds to a consistent run. The global predicate can be applied to any one of the global states in the run since each is guaranteed to be consistent. An application of this solution to deadlock detection is given in Section 14.1. Causal delivery can be implemented at any process rather than just at the monitor. If processes communicate exclusively through broadcasts (rather than point-to-point sends), then delivery rule DR3 remains the appropriate mechanism for achieving causal delivery at all destinations [3]. The resulting primitive, known as causal broadcast (c.f. Section 15), has been recognized as an important abstraction for building distributed applications [3,15,28]. If, on the other hand, communication can take place through point-to-point sends, a delivery rule can be derived based on an extension of vector clocks where each message carries a timestamp composed of n vector clocks (i.e., an n n matrix) [32,30].
UBLCS-93-1
20
12
Causal Delivery and Hidden Channels
p1
pipe rupture
m p2
pressure drop
m0 p3
apply heat
Figure 9. External Environment as a Hidden Channel
12
Causal Delivery and Hidden Channels
In general, causal delivery allows processes to reason globally about the system using only local information. For such conclusions to be meaningful, however, we need to restrict our attention to closed systemsthose that constrain all communication to take place within the boundaries of the computing system. If global reasoning based on causal analysis is applied to systems that contain so-called hidden channels, incorrect conclusions may be drawn [17]. To illustrate the problem, consider the example taken from [16] and shown in Figure 9. A physical process is being monitored and controlled by a distributed system consisting of p1 ; p2 and p3 . Process p1 is monitoring the state of a steam pipe and detects its rupture. The event is notied to the controller process p3 in message m. Process p2 is monitoring the pressure of the same pipe, several meters downstream from p1 . A few seconds after the rupture of the pipe, p2 detects a drop in the pressure and noties p3 of the event in message m0. Note that from the point of view of explicit communication, messages m and m0 are concurrent. Message m0 arrives at p3 and is delivered without delay since there are no undelivered messages that causally precede it. As part of its control action, p3 reacts to the pressure drop by applying more heat to increase the temperature. Some time later, message m arrives reporting the rupture of the pipe. The causal sequence observed by p3 is hpressure drop, apply heat, pipe rupturei leading it to conclude that the pipe ruptured due to the increased temperature. In fact, the opposite is true. The apparent anomaly is due to the steam pipe which acts as a communication channel external to the system. The rupture and pressure drop events are indeed causally related even though it is not captured by the ! relation. When the pipe is included as a communication channel, the order in which messages are seen by p3 violates causal delivery. In systems that are not closed, global reasoning has to be based on totally-ordered observations derived from global real-time. Since this order is consistent with causal precedence, anomalous conclusions such as the one above will be avoided.
UBLCS-93-1
21
13
Distributed Snapshots
13
Distributed Snapshots
In Section 5 we presented a strategy for solving the GPE problem through active monitoring. In this strategy, p0 requested the states of the other processes and then combined them into a global state. Such a strategy is often called a snapshot protocol, since p0 takes pictures of the individual process states. As we noted, this global state may not be consistent, and so the monitor may make an incorrect deduction about the system property encoded in the global predicate. We will now develop a snapshot protocol that constructs only consistent global states. The protocol is due to Chandy and Lamport [5], and the development described here is due to Morgan [26]. For simplicity, we will assume that the channels implement FIFO delivery, and we omit details of how individual processes return their local states to p0 . For this protocol, we will introduce the notion of a channel state. For each channel from pi to pj , its state i;j are those messages that pi has sent to pj but pj has not yet received. Channel states are only a convenience in that each i;j can be inferred from just the local states i and j as the set difference between messages sent by pi to pj (encoded in i ) and messages received by pj from pi (encoded in j ). In many cases, however, explicit maintenance of channel state information can lead to more compact process local states and simpler encoding for the global predicate of interest. For example, when constructing the waits-for graph in deadlock detection, an edge is drawn from pi to pj if pi is blocked due to pj . This relation can be easily obtained from the local process states and channel states: process pi is blocked on pj if i records the fact that there is an outstanding request to pj , and j;i contains no response messages. Let INi be the set of processes that have channels connecting them directly to pi and OUTi be the set of processes to which pi has a channel. Channels from pj 2 INi to pi are called incoming while channels from pi to pj 2 OUTi are called outgoing with respect to pi . For each execution of the snapshot protocol, a process pi will record its local state i and the states of its incoming channels ( j;i , for all pj 2 INi ). 13.1 Snapshot Protocols
We proceed as before by devising a simple protocol based on a strong set of assumptions and rening the protocol as we relax them. Initially, assume that all processes have access to a global real-time clock RC, that all message delays are bound by some known value, and that relative process speeds are bounded. The rst snapshot protocol is based on all processes recording their states at the same real-time. Process p0 chooses a time tss far enough in the future in order to guarantee that a message sent now will be received by all other processes before tss .15 To facilitate the recording of channel states, processes include a timestamp in each message indicating when the messages send event was executed. Snapshot Protocol 1 1. Process p0 sends the message take snapshot at tss to all processes.16
15. Recall that there need not be a channel between all pairs of processes, and so tss must account for the possibility of messages being forwarded. 16. For simplicity, we describe the protocols for a single initiation by process p0 . In fact, they can be initiated by any process, and as long as concurrent initiations can be distinguished, multiple initiations are possible.
UBLCS-93-1
22
13
Distributed Snapshots
2. When clock RC reads tss , each process pi records its local state i , sends an empty message over all of its outgoing channels, and starts recording messages received over each of its incoming channels. Recording the local state and sending empty messages are performed before any intervening events are executed on behalf of the underlying computation. 3. First time pi receives a message from pj with timestamp greater than or equal to tss , pi stops recording messages for that channel and declares j;i as those messages that have been recorded. For each pj 2 INi , the channel state j;i constructed by process pi contains the set of messages sent by pj before tss and received by pi after tss . The empty messages in Step 2 are sent in order to guarantee liveness:17 process pi is guaranteed to eventually receive a message m from every incoming channel such that TS(m) tss . Being based on real-time, it is easy to see that this protocol constructs a consistent global stateit constructs a global state that did in fact occur and thus could have been observed by our idealized external observer. However, it is worth arguing this point a little more formally. Note that an event e is in the consistent cut Css associated with the constructed global state if and only if RC(e) < tss . Hence, Since real-time clock RC satises the clock condition, the above equation implies that Css is a consistent cut. In fact, the clock condition is the only property of RC that is necessary for Css to be a consistent cut. Since logical clocks also satisfy the clock condition, we should be able to substitute logical clocks for real-time clocks in the above protocol. There are, however, two other properties of synchronous systems used by Snapshot Protocol 1 that need to be supplied: The programming construct when LC = t do S doesnt make sense in the context of logical clocks since the given value t need not be attained by a logical clock.18 For example, in Figure 4 the logical clock of p3 never attains the value 6, because the receipt of the message from p1 forces it to jump from 5 to 7. Even if LC does attain a value of t, the programming construct is still problematic. Our rules for updating logical clocks are based on the occurrence of new events. Thus, at the point LC = t, the event that caused the clock update has been executed rather than the rst event of S. We overcome this problem with the following rules. Suppose pi contains the statement when LC = t do S , where S generates only internal events or send events. Before executing an event e, process pi makes the following test: If e is an internal or send event and LC = t ? 2, then pi executes e and then starts executing S . If e = receive(m) where TS(m) t and LC < t ? 1, then pi puts the message back onto the channel, re-enables e for execution, sets LC to t ? 1 and starts executing S. In Protocol 1, the monitor p0 chooses tss such that the message take snapshot at tss is received by all other processes before time tss . In an asynchronous system, p0 cannot
17. Our use of empty messages here is not unlike their use in distributed simulation for the purposes of advancing global virtual time [25]. 18. Note that this problem happens to be one aspect of the more general problem of simulating a synchronous system in an asynchronous one [1].
(e 2 Css ) ^ (RC(e0) < RC(e)) ) (e0 2 Css ):
UBLCS-93-1
23
13
Distributed Snapshots
compute such a logical clock value. Instead, we assume that there is an integer value ! large enough that no logical clock can reach ! by using the update rules in Section 8. Assuming the existence of such an ! requires us to bound both relative process speeds and message delays, and so we will have to relax it as well. Given the above considerations, we obtain Snapshot Protocol 2, which differs from Protocol 1 only in its use of logical clocks in place of the real-time clock. Snapshot Protocol 2 1. Process p0 sends take snapshot at ! to all processes and then sets its logical clock to !. 2. When its logical clock reads ! , process pi records its local state i , sends an empty message along each outgoing channel, and starts recording messages received over each of its incoming channels. Recording the local state and sending empty messages are performed before any intervening events are executed on behalf of the underlying computation. 3. First time pi receives a message from pj with timestamp greater than or equal to ! , pi stops recording messages for that channel and declares j;i as those messages that have been recorded. Channel states are constructed just as in Protocol 1 with ! playing the role of tss . As soon as p0 sets its logical clock to ! , it will immediately execute Step 2, and the empty messages sent by it will force the clocks of processes in OUT0 to attain ! . Since the network is strongly connected, all of the clocks will eventually attain ! , and so the protocol is live. We now remove the need for ! . Note that, with respect to the above protocol, a process does nothing between receiving the take snapshot at ! message and receiving the rst empty message that causes its clock to pass through ! . Thus, we can eliminate the message take snapshot at ! and instead have a process record its state when it receives the rst empty message. Since processes may send empty messages for other purposes, we will change the message from being empty to one containing a unique value, for example, take snapshot. Furthermore, by making this message contain a unique value, we no longer need to include timestamps in messagesthe message take snapshot is the rst message that any process sends after the snapshot time. Doing so removes the last reference to logical clocks, and so we can eliminate them from our protocol completely. Snapshot Protocol 3 (Chandy-Lamport [5]) 1. Process p0 starts the protocol by sending itself a take snapshot message. 2. Let pf be the process from which pi receives the take snapshot message for the rst time. Upon receiving this message, pi records its local state i and relays the take snapshot message along all of its outgoing channels. No intervening events on behalf of the underlying computation are executed between these steps. Channel state f;i is set to empty and pi starts recording messages received over each of its other incoming channels. 3. Let ps be the process from which pi receives the take snapshot message beyond the rst time. Process pi stops recording messages along the channel from ps and declares channel state s;i as those messages that have been recorded. Since a take snapshot message is relayed only upon the rst receipt and since the network is strongly connected, a take snapshot message traverses each channel exactly
UBLCS-93-1
24
13
Distributed Snapshots
p0 e1 1 e2 1 e1 m p2 e1 2 e2 2 e3 e2 2 e4 2 e5 2 e3 1 e4 1 e5 1 e6 1
p1
Figure 10. Application of the Chandy-Lamport Snapshot Protocol
once. When process pi has received a take snapshot message from all of its incoming channels, its contribution to the global state is complete and its participation in the snapshot protocol ends. Note that the above protocols can be extended and improved in many ways including relaxation of the FIFO assumption [23,35] and reduction of the message complexity [24,31]. Let s be a global state constructed by the Chandy-Lamport distributed snapshot protocol. In the previous section, we argued that s is guaranteed to be consistent. Beyond that, however, the actual run that the system followed while executing the protocol may not even pass through s . In this section, we show that s is not an arbitrary consistent global state, but one that has useful properties with respect to the run that generated it. Consider the application of Chandy-Lamport snapshot protocol to the distributed computation of Figure 3. The composite computation is shown in Figure 10 where solid arrows indicate messages sent by the underlying computation while dashed arrows indicate take snapshot messages sent by the protocol. From the protocol description, the constructed global state is 23 with 1;2 empty and 2;1 containing message m. Let the run followed by processes p1 and p2 while executing the protocol be 13.2 Properties of Snapshots
r = e1 e1 e2 e3 e2 e4 e3 e4 e5 e5 e6 2 1 1 1 2 1 2 2 1 2 1
or in terms of global states,
r=
00
01
11
21
31
32
42
43
44
54
55
65
Let the global state of this run in which the protocol is initiated be 21 and the global state in which it terminates be 55 . Note that run r does not pass through the constructed global state 23 . As can be veried by the lattice of Figure 3, however, 21 ; 23 ; 55 in this example. We now show that this relationship holds in general.
UBLCS-93-1
25
14
Properties of Global Predicates
Let a be the global state in which the snapshot protocol is initiated, f be the global state in which the protocol terminates and s be the global state constructed. We will show that there exists a run R such that a ;R s ;R f . Let r be the actual run the system followed while executing the snapshot protocol, and let ei denote the event when pi receives take snapshot for the rst time, causing pi to record its state. An event ei of pi is a prerecording event if ei !ei ; otherwise, it is a postrecording event. Consider any two adjacent events he; e0i of r such that e is a postrecording event and e0 is a prerecording event.19 We will show that :(e!e0 ), and so the order of these two events can be swapped, thereby resulting in another consistent run. If we continue this process of swapping hpostrecording, prerecordingi event pairs, then we will eventually construct a consistent run in which no prerecording event follows a postrecording event. The global state associated with the last prerecording event is therefore reachable from a and the state f is reachable from it. Finally, we will show that this state is s , the state that the snapshot protocol constructs. Consider the subsequence he; e0i of run r where e is a postrecording event and e0 a prerecording event. If e!e0 then the two events cannot be swapped without resulting in an inconsistent run. For contradiction, assume that e!e0. There are two cases to consider: 1. Both events e and e0 are from the same process. If this were the case, however, then by denition e0 would be a postrecording event. 2. Event e is a send event of pi and e0 is the corresponding receive event of pj . If this were the case, however, then from the protocol pi will have sent a take snapshot message to pj by the time e is executed, and since the channel is FIFO, e0 will also be a postrecording event. Hence, a postrecording event cannot causally precede a prerecording event and thus any hpostrecording, prerecordingi event pair can be swapped. Let R be the run derived from r by swapping such pairs until all postrecording events follow the prerecording events. We now argue that the global state after the execution of the last prerecording event e in R is s . By the protocol description and the denition of prerecording, postrecording events that record local states will record them at point e. Furthermore, by the protocol, the channel states that are recorded are those messages that were sent by prerecording events and received by postrecording events. By construction, these are exactly those messages in the channels after the execution of event e, and so s is the state recorded by the snapshot protocol. 2
14
Properties of Global Predicates
We have derived two methods for global predicate evaluation: one based on a monitor actively constructing snapshots and another one based on a monitor passively observing runs. The utility of either approach for solving practical distributed systems problems, however, depends in part on the properties of the predicate that is being evaluated. In this section, some of these properties are examined. 14.1 Let s be a consistent global state of a computation constructed through any feasible mechanism. Given that communication in a distributed system incurs delays, s can only reect
19. Adjacent event pairs he3 ; e2 i and he4 ; e3 i of run r are two such examples. 1 2 1 2
Stable Predicates
UBLCS-93-1
26
14
Properties of Global Predicates
process p(i): 1 i n var pending: queue of [message, integer] init empty; working: boolean init false; m: message; j: integer; while true do while working or (size(pending) = 0) do receive m from p(j); case m.type of request: pending := pending + [m, j]; response: [m, j] := NextState(m, j); working := (m.type = request); send m to p(j); esac od ; while not working and (size(pending) > 0) do [m, j] := rst(pending); pending := tail(pending); [m, j] := NextState(m, j); working := (m.type = request); send m to p(j) od od end p(i); Figure 11. Server Process
% pending requests to p(i) % processing a request
% m set to message, j to its source
UBLCS-93-1
27
14
Properties of Global Predicates
some past state of the system by the time they are obtained, conclusions drawn about the system by evaluating predicate in s may have no bearing to the present. Many system properties one wishes to detect, however, have the characteristic that once they become true, they remain true. Such properties (and their predicates) are called stable. Examples of stable properties include deadlock, termination, the loss of all tokens, and unreachability of storage (garbage collection). If is stable, then the monitor process can strengthen its knowledge about when is satised. As before, let a be the global state in which the global state construction protocol is initiated, f be the global state in which the protocol terminates and s be the global state it constructs. Since a ; s ; f , if is stable, then the following conclusions are possible
is true in s ) ) ( is true in f )
and
is false in s ) ) ( is false in a ):
As an example of detecting a stable property, we return to deadlock in the clientserver system described in Section 5. We assume that there is a bidirectional communication channel between each pair of processes and each process when acting as a server runs the same program, shown in Figure 11. The behavior of a process as a client is much simpler: after sending a request to a server it blocks until the response is received. The server is modeled as a state machine [33]: it repeatedly receives a message, changes its state, and optionally sends one or more messages. The function NextState() computes the action a server next takes: given a message m from process pj , the invocation NextState(m, j) changes the state of the server and returns the next message to send along with its destination. The resulting message may be a response to the clients request or it may be a further request whose response is needed to service the clients request. All requests received by a server, including those received while it is servicing an earlier request, are queued on the FIFO queue pending, and the server removes and begins servicing the rst entry from pending after it nishes an earlier request by sending the response. Figures 12 shows the server of Figure 11 with a snapshot protocol embedded in it. Each server maintains a boolean array blocking that indicates which processes have sent it requests to which it has not yet responded (this information is also stored in pending, but we duplicate it in blocking for clarity). When a server pi rst receives a snapshot message, it sends the contents of blocking to p0 and relays the snapshot message to all other processes. Subsequent snapshot messages are ignored until pi has received n such messages, one from each other process.20 The conventional denition of pi waits-for pj is that pi has sent a request to pj and pj has not yet responded. As in Section 5, we will instead use the weaker denition pi waits-for+ pj which holds when pj has received a request from pi to which it has not yet responded [11]. By structuring the server as a state machine, even requests sent to a deadlocked server will eventually be received and denoted in blocking. Hence, a system that contains a cycle in the conventional WFG will eventually contain a cycle in the WFG+ , and so a deadlock will be detected eventually. Furthermore, using the WFG+ instead of the WFG has the advantage of referencing only the local process states, and so the embedded snapshot protocol need not record channel states.
20. By the assumption that the network is completely connected, each invocation of the snapshot protocol will result in exactly n snapshot messages to be received by each process.
UBLCS-93-1
28
14
Properties of Global Predicates
process p(i): 1 i n var pending: queue of [message, integer] init empty; % pending requests to p(i) working: boolean init false; % processing a request blocking: array [1..n] of boolean init false; % blocking[j] = p(j) is blocked on p(i) m: message; j: integer; s: integer init 0; while true do while working or (size(pending) = 0) do receive m from p(j); % m set to message, j to its source case m.type of request: blocking[j] := true; pending := pending + [m, j]; response: [m, j] := NextState(m, j); working := (m.type = request); send m to p(j); if (m.type = response) then blocking[j] := false; snapshot: if s = 0 then % this is the rst snapshot message send [type: snapshot, data: blocking] to p(0); send [type: snapshot] to p(1),...,p(i?1),p(i+1),...,p(n) s := (s + 1) mod n; esac od ; while not working and (size(pending) > 0) do [m, j] := head(pending); pending := tail(pending); [m, j] := NextState(m, j); working := (m.type = request); send m to p(j); if (m.type = response) then blocking[j] := false; od od end p(i); Figure 12. Deadlock Detection through Snapshots: Server Side
UBLCS-93-1
29
14
Properties of Global Predicates
process p(0): var wfg: array [1..n] of array [1..n] of boolean; j, k: integer; m: message; while true do wait until deadlock is suspected; send [type: snapshot] to p(1), ..., p(n); for k := 1 to n do receive m from p(j); wfg[j] := m.data; if (cycle in wfg) then system is deadlocked od end p(0);
% wfg[i, j] = p(j) waits-for p(i)
Figure 13. Deadlock Detection through Snapshots: Monitor Side
Figure 13 shows the code run by the monitor p0 acting as the deadlock detector. This process periodically starts a snapshot by sending a snapshot message to all other processes. Then, p0 receives the arrays blocking from each of the processes and uses this data to test for a cycle in the WFG+ . This approach has the advantage of generating an additional message load only when deadlock is suspected. However, the approach also introduces a latency between the occurrence of the deadlock and detection that depends on how often the monitor starts a snapshot. Figures 14 and 15 show the server and monitor code, respectively, of a reactivearchitecture deadlock detector. This solution is much simpler than the snapshot-based version. In this case, pi sends a message to p0 whenever pi receives a request or sends a response to a client. Monitor p0 uses these notications to update a WFG+ in which it tests for a cycle. The simplicity of this solution is somewhat supercial, however, because the protocol requires all messages to p0 to be sent using causal delivery order instead of FIFO order. The only latency between a deadlocks occurrence and its detection is due to the delay associated with a notication message, and thus, is typically shorter than that of the snapshot-based detector. 14.2 Nonstable Predicates
Unfortunately, not all predicates one wishes to detect are stable. For example, when debugging a system one may wish to monitor the lengths of two queues, and notify the user if the sum of the lengths is larger than some threshold. If both queues are dynamically changing, then the predicate corresponding to the desired condition is not stable. Detecting such predicates poses two serious problems. The rst problem is that the condition encoded by the predicate may not persist long enough for it to be true when the predicate is evaluated. For example, consider the computation of Figure 16 in which variables x and y are being maintained by two processes p1 and p2 , respectively. Suppose we are interested in monitoring the condition (x = y). There are seven consistent global states in which the condition (x = y ) holds, yet if the monitor evaluates (x = y ) after state 54 then the condition will be found not to hold. The second problem is more disturbing: if a predicate is found to be true by the monitor, we do not know whether ever held during the actual run. For example, suppose
UBLCS-93-1
30
14
Properties of Global Predicates
process p(i): 1 i n var pending: queue of [message, integer] init empty; % pending requests to p(i) working: boolean init false; % processing a request m: message; j: integer; while true do while working or (size(pending) = 0) do receive m from p(j); % m set to message, j to its source case m.type of request: send [type: requested, of: i, by: j] to p(0); pending := pending + [m, j]; response: [m, j] := NextState(m, j); working := (m.type = request); send m to p(j); if (m.type = response) then send [type: responded, to: j, by: i] to p(0); esac od ; while not working and (size(pending) > 0) do [m, j] := rst(pending); pending := tail(pending); [m, j] := NextState(m, j); working := (m.type = request); send m to p(j); if (m.type = response) then send [type: responded, to: j, by: i] to p(0) od od end p(i); Figure 14. Deadlock Detection using Reactive Protocol: Server Side
UBLCS-93-1
31
14
Properties of Global Predicates
process p(0): var wfg: array [1..n, 1..n] of boolean init false; m: message; j: integer; while true do receive m from p(j); if (m.type = responded) then wfg[m.by, m.to] := false else wfg[m.of, m.by] := true; if (cycle in wfg) then system is deadlocked od end p(0);
% wfg[i, j] = p(j) waits-for p(i)
% m set set to message, j to its source
Figure 15. Deadlock Detection using Reactive Protocol: Monitor Side
in the same computation the condition being monitored is (y ? x) = 2. The only two global states of Figure 16 satisfying this condition are 31 and 41 . Let a snapshot protocol be initiated in state 11 of the run
00 01 11 12 22 32 42 43 44 45 55 65
From the result of Section 13.2, we know that the snapshot protocol could construct either global state 31 or 41 since both are reachable from 11 . Thus, the monitor could detect (y ? x) = 2 even though the actual run never goes through a state satisfying the condition. It appears that there is very little value in using a snapshot protocol to detect a nonstable predicatethe predicate may have held even if it is not detected, and even if it is detected it may have never held. The same problems exist when nonstable predicates are evaluated over global states constructed from observations of runs: if a nonstable predicate holds at some state during a consistent observation, then the condition may or may not have held during the actual run that produced it. With observations, however, we can extend nonstable global predicates such that they are meaningful in the face of uncertainty of the run actually followed by the computation. To do this, the extended predicates must apply to the entire distributed computation rather than to individual runs or global states of it. There are two choices for dening predicates over computations [6,22]: 1. Possibly( ): There exists a consistent observation O of the computation such that holds in a global state of O. 2. Denitely( ): For every consistent observations O of the computation, there exists a global state of O in which holds. The distributed computation of Figure 16 satises both predicates Possibly((y ?x) = 2) and Denitely(x = y ). As with stable predicates, by the time they are detected, both of these predicates refer to some past state or states of a run. The predicate currently holds can also be detected, but to do so will introduce blocking of the underlying computation. An application of these extended predicates is when a run is observed for purposes of debugging [6]. For instance, if identies some erroneous state of the computation, then Possibly( ) holding indicates a bug, even if it is not observed during an actual run. For
UBLCS-93-1
32
14
Properties of Global Predicates
00 10 01 11 21 31 41 42 32 33 43 53 63 64 65 54 55 44 45 22 23 12 13 02 03
(y ? x) = 2
p1
x := 3 2 e1 e1 1
(1,0) (0,1)
x := 4 4 e3 e1 1
e5 1
x := 5 e6 1
(2,1) (3,1) (4,1) (0,2) (0,3)
(5,3) (6,3) (4,4) (4,5)
x=y
p2
e2 e3 2 2 y := 4 Initially x = 0 and y = 10
e1 2 y := 6
e4 2
e5 2 y := 2
Figure 16. Global States Satisfying Predicates (x = y) and (y ? x) = 2
UBLCS-93-1
33
14
Properties of Global Predicates
example, if (y ? x) = 2 denotes an erroneous state, then the computation of Figure 16 is incorrect, since there is no guarantee that the erroneous state will not occur in some run. The intuitive meanings of Possibly and Denitely could lead one to believe that they are duals of each other: :Denitely ( ) being equivalent to Possibly(: ) and :Possibly ( ) being equivalent to Denitely(: ). This is not the case. For example, while it is true that :Denitely( ) holding through a computation does imply Possibly(: ) (there must be an observation O in which : holds in all of its states), it is possible to have both Possibly(: ) and Denitely( ) hold. Figure 16 illustrates the latter: the computation satises both Possibly(x 6= y ) and Denitely(x = y ). Furthermore, if predicate is stable, then Possibly( ) Denitely( ). The inverse, however, is not true in general. The choice between detecting whether currently holds versus whether possibly or denitely held in the past depends on which restrictions confound the debugging process more. Detecting a condition that occurred in the past may require program replay or reverse execution in order to recover the state of interest, which can be very expensive to provide. Hence, detection in the past is better suited to a post-mortem analysis of a computation. Detecting the fact that currently holds, on the other hand, requires delaying the execution of processes, which can be a serious impediment to debugging. By blocking some processes when the predicate becomes potentially true, we may make the predicate either more or less likely to occur. For example, a predicate may be less likely to occur if processes communicate using timeouts or some other uncontrolled form of communication. The latter is a particular problem when processes are multithreaded; that is, consisting of multiple, independently schedulable threads of control which may communicate through shared memory. In fact, it is rarely practical to monitor such communication when debugging without hardware or language support. 14.3 Detecting Possibly and Denitely
The algorithms for detecting Possibly( ) and Denitely( ) are based on the lattice of consistent global states associated with the distributed computation. For every global state in the lattice there exists at least one run that passes through . Hence, if any global state in the lattice satises , then Possibly( ) holds. For example, in the global state lattice of Figure 16 both 31 and 41 satisfy (y ? x) = 2 meaning that Possibly((y ? x) = 2) holds for the computation. The property Denitely( ) requires all possible runs to pass through a global state that satises . In Figure 16 the global state 43 satises (x = y ). Since this is the only state with level 7, and all runs must contain a global state of each level, Denitely(x = y ) also holds for the computation. Figure 17 is a high-level procedure for detecting Possibly( ). The procedure constructs the set of global states current with progressively increasing levels (denoted by `). When a member of current satises , then the procedure terminates indicating that Possibly( ) holds. If, however, the procedure constructs the nal global state (the global state in which the computation terminates) and nds that this global state does not satisfy , then the procedure returns : Possibly( ). In order to implement this procedure, the monitored processes send the portion of their local states that is referenced in to the monitor p0 . Process p0 maintains sequences of these local states, one sequence per process, and uses them to construct the global states of a given level. The basic operation used by the procedure is current := states of level `, and so we must be able to determine when all of the global states of a given level can be assembled and must be able to effectively assemble them.
UBLCS-93-1
34
14
Properties of Global Predicates
procedure Possibly( ); var current: set of global states; `: integer; begin % Synchronize processes and distribute send to all processes; current := global state 0...0 ; release processes; ` := 0; % Invariant: current contains all states of level ` that are reachable from while (no state in current satises ) do if current = nal global state then return false ` := ` + 1; current := states of level ` od return true end Figure 17. Algorithm for Detecting Possibly( ).
0...0
Let Qi be the sequence of local states, stored in FIFO order, that p0 maintains for k process pi , where each state i in Qi is labeled with the vector timestamp VC(ek ). Dene i k ) to be the global state with the smallest level containing k and max( k ) to be the min ( i i i k 3 global state with the largest level containing i . For example, in Figure 16, min ( 1 ) = 31 3 and max ( 1 ) = 33 . These states can be computed using Property 5 of vector clocks as follows: cj c c c min ( ik ) = ( 11 ; 22 ; . . . ; nn ) : 8j : VC( j ) j ] = VC( ik ) j ] and
c c k c max ( i ) = ( 11 ; 22 ; . . . ; nn ) : 8j : (VC( jcj ) i] VC( ik) i]) ^ (( jcj
= jf ) _ (VC( jc +1 ) i] > VC( ik ) i]))
j
f where j is the state in which process pj terminates. k k k Global states min ( i ) and max ( i ) bound the levels of the lattice in which i k is particularly easy to compute: it is the sum of occurs. The minimum level containing i k components of the vector timestamp VC( i ). Thus, p0 can construct the set of states with level ` when, for each sequence Qi , the sum of the components of the vector timestamp of the last element of Qi is at least `. For example, if p0 monitors the computation shown in 5 4 Figure 16, then p0 can start enumerating level 6 when it has received states 1 and 2 because 5 any global state containing 1 must have a level of at least 8 (5 + 3) and any global state 4 containing 2 must also have a level of at least 8 (4 + 4). Similarly, process p0 can remove state k k i from Qi when ` is greater than the level of the global state max( i ). For the example in 2 23 2 , and so p0 can remove 1 from Q1 once it has set ` to 6. Figure 16, max ( 1 ) = Given the set of states of some level `, it is also straightforward (if somewhat costly) to construct the set of states of level ` + 1: for each state i1 ;i2 ;:::;in of level `, one constructs the n global states i1 +1;i2 ;:::;in , ..., i1 ;i2 ;:::;in+1 . Then, Property 5 of vector clocks can be used to determine which of these global states are consistent. One can be careful and avoid
UBLCS-93-1
35
14
Properties of Global Predicates
procedure Denitely( ); var current, last: set of global states; `: integer; begin % Synchronize processes and distribute send to all processes; last := global state 0...0 ; release processes; remove all states in last that satisfy ; ` := 1; % Invariant: last contains all states of level ` ? 1 that are reachable % from 0...0 without passing through a state satisfying while (last 6= f g) do current := states of level ` reachable from a state in last; remove all states in current that satisfy ; if current = nal global state then return false ` := ` + 1; last := current od return true end ; Figure 18. Algorithm for Detecting Denitely( ).
redundantly constructing the same global state of level ` + 1 from different global states of level `, but the computation can still be costly because the number of states of level ` grows as O(`n?1 ) (for n constant). Figure 18 gives the high-level algorithm used by the monitoring process p0 to detect Denitely( ). This algorithm iteratively constructs the set of global states that have a level ` and are reachable from the initial global state without passing through a global state that satises . If this set of states is empty, then Denitely( ) holds and if this set contains only the nal global state then : Denitely( ) holds. Note that, unlike detecting Possibly( ), not all global states need be examined. For example, in Figure 16, suppose that when the global states of level 2 were constructed, it was determined that 02 satised . When constructing the states of level 3, global state 03 need not be included since it is reachable only through 02 . The two detection algorithms are linear in the number of global states, but unfortunately the number of global states is O(kn ) where k is the maximum number events a monitored process has executed. There are techniques that can be used to limit the number of constructed global states. For example, a process pi need only send a message to p0 when pi potentially changes or when pi learns that pj has potentially changed . Another technique is for pi to send an empty message to all other processes when pi potentially changes . These, and other techniques for limiting the number of global states are discussed in [22]. An alternative approach is to restrict the global predicate to one that can be efciently detected, such as the conjunction and disjunction of local predicates [10].
UBLCS-93-1
36
15 Multiple Monitors
15
Multiple Monitors
There are several good reasons for having multiple monitors observe the same computation for the purposes of evaluating the same predicate [14]. One such reason is increased performancein a large system, interested parties may have the result of the predicate sooner by asking the monitor that is closest to them.21 Another reason is increased reliabilityif the predicate encodes the condition guarding a critical system action (e.g., shutdown of a chemical plant), then having multiple monitors will ensure the action despite a bounded number of failures. The reactive-architecture solution to GPE based on passive observations can be easily extended to multiple monitors without modifying its general structure. The only change that is required is for the processes to use a causal broadcast communication primitive to notify the group of monitors [12]. In this manner, each monitor will construct a consistent, but not necessarily the same, observation of the computation. Each observation will correspond to a (possibly different) path through the global state lattice of the computation. Whether the results of evaluating predicate by each monitor using local observations are meaningful depends on the properties of . In particular, if is stable and some monitor observes that it holds, then all monitors will eventually observe that it holds. For example, in the case of deadlock detection with multiple monitors, if any one of them detects a deadlock, eventually all of them will detect the same deadlock since deadlock is a stable property. They may, however, disagree on the identity of the process that is responsible for creating the deadlock (the one who issued the last request forming the cycle in the WFG+ ). Multiple observations for evaluating nonstable predicates create problems similar to those discussed in Section 14.2. There are essentially two possibilities for meaningfully evaluating nonstable predicates over multiple observations. First, the predicate can be extended using Denitely or Possibly such that it is made independent of the particular observation but becomes a function of the computation, which is the same for all monitors. Alternatively, the notication messages can be disseminated to the group of monitors in a manner such that they all construct the same observation. This can be achieved by using a causal atomic broadcast primitive that results in a unique total order consistent with causal precedence for all messages (even those that are concurrent) at all destinations [7,12]. Now consider the case where the monitor is replicated for increased reliability. If communication or processes in a distributed system are subject to failures, then sending the same notication message to all monitor replicas using causal delivery is not sufcient for implementing a causal broadcast primitive. For example if channels are not reliable, some of the notication messages may be lost such that different monitors effectively observe different computations. Again, we can accommodate communication and processes failures in our reactive architecture by using a reliable version of causal broadcast as the communication primitive [12]. Informally, a reliable causal broadcast, in addition to preserving causal precedence among message send events, guarantees delivery of a message either to all or none of the destination processes.22 A formal specication of reliable causal broadcast in the presence of failures has to be done with care and can be found in [12]. Note that in an asynchronous system subject to failures, reliable causal broadcast is the best one can hope for in that it is impossible to implement communication primitives
21. In the limit, each process could act as a monitor such that the predicate could be evaluated locally. 22. Note that in [12], this primitive is called casual broadcast without the reliable qualier since all broadcast primitives are specied in the presence of failures.
UBLCS-93-1
37
16
Conclusions
that achieve totally-ordered delivery using deterministic algorithms. Furthermore, in an environment where processes may fail, and thus certain events never get observed, our notion of a consistent global state may need to be re-examined. For some global predicates, the outcome may be sensitive not only to the order in which events are observed, but also to the order in which failures are observed by the monitors. In such cases, it will be necessary to extend the causal delivery abstraction to include not only actual messages but also failure notications (as is done in systems such as ISIS [2]).
16
Conclusions
We have used the GPE problem as a motivation for studying consistent global states of distributed systems. Since many distributed systems problems require recognizing certain global conditions, the construction of consistent global states and the evaluation of predicates over these states constitute fundamental primitives with which one can build such systems. We derived two classes of solutions to the GPE problem: a snapshot based one, that constructs a consistent global state and a reactive-architecture based one, that constucts a consistent run of the system. To derive these two classes, we have developed a set of basic concepts and mechanisms for representing and reasoning about computations in asynchronous distributed systems. These concepts represent generalizations of the notion of time in order to capture the uncertainty that is inherent in the execution of such systems. Two kinds of clocks were presented: logical clocks that generalize real-time clocks, and vector clocks that are incomparable to real-time clocks but exactly capture the causal precedence relation between events. We illustrated the practicality of our concepts and mechanisms by applying them to distributed deadlock detection and distributed debugging. Reactive-architecture solutions based on passive observations were shown to be more exible because they capture a run instead of just a global state. In particular, these solutions can be easily adapted to deal with nonstable predicates, multiple observations and failures. Each extension can be easily accommodated by using an appropriate communication primitive for notications, leaving the overall reactive architecture unchanged. Acknowledgments The material on distributed debugging is derived from joint work with Robert Cooper and Gil Neiger. We are grateful to them for consenting to its inclusion here. The presentation has beneted greatly from extensive comments by Friedemann Mattern, Michel Raynal and Fred Schneider on earlier drafts.
References
[1] Baruch Awerbuch. Complexity of network synchronization. Journal of the ACM, 32(4):804823, October 1985. [2] K. Birman. The process group approach to reliable distributed computing. Technical Report TR91-1216, Department of Computer Science, Cornell University, January 1993. To appear in Communications of the ACM. [3] K. Birman, A. Schiper, and P. Stephenson. Lightweight causal and atomic group multicast. ACM Transactions on Computer Systems, 9(3):272314, August 1991.
UBLCS-93-1
38
REFERENCES
[4] Andrew D. Birrel and Bruce J. Nelson. Implementing remote procedure calls. ACM Transactions on Computer Systems, 2(1):3959, February 1984. [5] K. Mani Chandy and Leslie Lamport. Distributed snapshots: Determining global states of distributed systems. ACM Transactions on Computer Systems, 3(1):6375, February 1985. [6] Robert Cooper and Keith Marzullo. Consistent detection of global predicates. In ACM/ONR Workshop on Parallel and Distributed Debugging, pages 163173, Santa Cruz, California, May 1991. [7] Flaviu Cristian, H. Aghili, H. Ray Strong, and Danny Dolev. Atomic broadcast: From simple message diffusion to Byzantine agreement. In Proceedings of the International Symposium on Fault-Tolerant Computing, pages 200206, Ann Arbor, Michigan, June 1985. A revised version appears as IBM Technical Report RJ5244. [8] D. Dolev, J.Y. Halpern, and R. Strong. On the possibility and impossibility of achieving clock synchronization. In Proceedings of the ACM Symposium on the Theory of Computing, pages 504511, April 1984. [9] C. J. Fidge. Timestamps in message-passing systems that preserve the partial ordering. In Eleventh Australian Computer Science Conference, pages 5566, University of Queensland, February 1988. [10] V. K. Garg and B. Waldecker. Unstable predicate detection in distributed programs. Technical Report TR-92-07-82, University of Texas at Austin, March 1992. [11] V. Gligor and S. Shattuck. On deadlock detection in distributed systems. IEEE Transactions on Software Engineering, SE-6:435440, September 1980. [12] Vassos Hadzilacos and Sam Toueg. Reliable broadcast and agreement algorithms. In S.J. Mullender, editor, Distributed Systems, chapter 5. ACM Press, 1993. [13] David Harel and Amir Pnueli. On the development of reactive systems. In K. R. Apt, editor, Logics and Models of Concurrent Systems, NATO ASI, pages 477498. SpringerVerlag, 1985. [14] J. Helary, C. Jard, N. Plouzeau, and M. Raynal. Detection of stable properties in distributed applications. In Proceedings of the ACM Symposium on Principles of Distributed Computing, pages 125136, Vancouver, British Columbia, August 1987. [15] M. Frans Kaashoek and Andrew S. Tanenbaum. Group communication in the amoeba distributed operating system. In Proceedings of the Eleventh International Conference on Distributed Computer Systems, pages 222230, Arlington, Texas, May 1991. IEEE Computer Society. [16] Hermann Kopetz. Sparse time versus dense time in distributed real-time systems. In Proceedings of the Twelfth International Conference on Distributed Computing Systems, pages 460467, Yokohama, Japan, June 1992. IEEE Computer Society. [17] Leslie Lamport. Time, clocks, and the ordering of events in a distributed system. Communications of the ACM, 21(7):558565, July 1978. [18] Leslie Lamport and P. M. Melliar-Smith. Synchronizing clocks in the presence of faults. Journal of the ACM, 32(1):5278, January 1985. [19] Butler Lampson. Atomic transactions. In B. Lampson et. al., editor, Distributed Systems Architecture and Implementation: An Advanced Course, volume 105 of Lecture Notes on Computer Science, pages 246265. Springer-Verlag, 1981. [20] H. M. Levy and E. D. Tempero. Modules, objects, and distributed programming: Issues in rpc and remote object invocation. Software - Practice and Experience, 21(1):7790, January 1991.
UBLCS-93-1
39
REFERENCES
[21] Kai Li and Paul Hudak. Memory coherence in shared virtual memory systems. ACM Transactions on Computer Systems, 7(4):321359, November 1989. [22] Keith Marzullo and Gil Neiger. Detection of global state predicates. In Proceedings of the Fifth International Workshop on Distributed Algorithms (WDAG-91), Lecture Notes on Computer Science. Springer-Verlag, Delphi, Greece, October 1991. [23] Friedemann Mattern. Virtual time and global states of distributed systems. In Michel Cosnard et. al., editor, Proceedings of the International Workshop on Parallel and Distributed Algorithms, pages 215226. North-Holland, October 1989. [24] Friedemann Mattern. Efcient algorithms for distributed snapshots and global virtual time approximation. Journal of Parallel and Distributed Computing, 1993. To appear. [25] J. Misra. Distributed-discrete event simulation. ACM Computing Surveys, 18(1):3965, March 1986. [26] Carroll Morgan. Global and logical time in distributed algorithms. Information Processing Letters, 20:189194, May 1985. [27] Gil Neiger and Sam Toueg. Substituting for real time and common knowledge in asynchronous distributed systems. In Proceedings of the ACM Symposium on Principles of Distributed Computing, pages 281293, Vancouver, British Columbia, August 1987. [28] Larry L. Peterson, Nick C. Bucholz, and Richard D. Schlichting. Preserving and using context information in interprocess communication. ACM Transactions on Computer Systems, 7(3):217246, August 1989. [29] M. Raynal. About logical clocks for distributed systems. Operating Systems Review, 26(1):4148, January 1992. [30] M. Raynal, A. Schiper, and S. Toueg. The causal ordering abstraction and a simple way to implement it. Information Processing Letters, 39(6):343350, September 1991. [31] A. Sandoz and A. Schiper. A characterization of consistent distributed snapshots using causal order. Technical Report 92-14, Departement dInformatique, Ecole Polytechnique Federale de Lausanne, Switzerland, October 1992. [32] A. Schiper, J. Eggli, and A. Sandoz. A new algorithm to implement causal ordering. In J.-C. Bermond and M. Raynal, editors, Proceedings of the Third International Workshop on Distributed Algorithms, volume 392 of Lecture Notes on Computer Science, pages 219232, Nice, France, September 1989. Springer-Verlag. [33] Fred Schneider. Replication management using the state machine approach. In S.J. Mullender, editor, Distributed Systems, chapter 7. ACM Press, 1993. [34] Reinhard Schwarz and Friedemann Mattern. Detecting causal relationships in distributed computations: In search of the Holy Grail. Technical Report SFB124-15/92, Department of Computer Science, University of Kaiserslautern, Kaiserslautern, Germany, December 1992. [35] Kim Taylor. The role of inhibition in asynchronous consistent-cut protocols. In J.C. Bermond and M. Raynal, editors, Proceedings of the Third International Workshop on Distributed Algorithms, volume 392 of Lecture Notes on Computer Science, pages 280291. Springer-Verlag, Nice, France, September 1989.
UBLCS-93-1
40
Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- President Manuel Quezon SpeechДокумент1 страницаPresident Manuel Quezon SpeechJhomarie De LeonОценок пока нет
- ShakespeareДокумент12 страницShakespeareapi-510189551Оценок пока нет
- Destiny Analysis of Roger FedererДокумент4 страницыDestiny Analysis of Roger Federerjerryking685Оценок пока нет
- HandoutДокумент3 страницыHandoutramiii17Оценок пока нет
- Visual Perception of Architecture Cultural Studies EssayДокумент6 страницVisual Perception of Architecture Cultural Studies EssayAureliaDewiОценок пока нет
- 09 - Chapter 3 PDFДокумент24 страницы09 - Chapter 3 PDFShamshuddin nadafОценок пока нет
- Leadership and Self-Deception - Diagrams - 20181023Документ31 страницаLeadership and Self-Deception - Diagrams - 20181023Phanniswer Ch100% (1)
- Root Cause AnalysisДокумент18 страницRoot Cause AnalysisJohn Brix Balisteros100% (3)
- The Scientific MethodДокумент215 страницThe Scientific MethodMelanie Tagudin TrinidadОценок пока нет
- Superstition WorksheetДокумент4 страницыSuperstition WorksheetMyoung Kyu Park100% (1)
- SST Vs BBTДокумент7 страницSST Vs BBTFlaxkikare100% (1)
- Describe One of Your Childhood Memories.: You Should SayДокумент6 страницDescribe One of Your Childhood Memories.: You Should SayIulianSiLorenaОценок пока нет
- Why Do People Believe in Conspiracy Theories - Scientific AmericanДокумент4 страницыWhy Do People Believe in Conspiracy Theories - Scientific Americanapi-3285979620% (1)
- Psychological Science: Facial Expressions of Emotion: New Findings, New QuestionsДокумент6 страницPsychological Science: Facial Expressions of Emotion: New Findings, New QuestionsIoana PascalОценок пока нет
- A Cardinals Prayer Repository Newman1.PagesДокумент2 страницыA Cardinals Prayer Repository Newman1.PagesCailein GillespieОценок пока нет
- 99期 沈志中 思想主體的套疊:拉岡與德希達Документ29 страниц99期 沈志中 思想主體的套疊:拉岡與德希達鄭百亨Оценок пока нет
- Nature of Inquiry and ResearchДокумент33 страницыNature of Inquiry and ResearchJoshua VicenteОценок пока нет
- The Theory of Social and Economic OrganizationДокумент2 страницыThe Theory of Social and Economic OrganizationMoussonОценок пока нет
- MECDYNAMICSДокумент15 страницMECDYNAMICSMark Asesor CalonzoОценок пока нет
- Student Application Form: The United World Colleges (International)Документ13 страницStudent Application Form: The United World Colleges (International)Rijad CelebicОценок пока нет
- Aesthetic Study On Permadi Lyosta's Works The Artist of Lekra From Takengon - Aceh CentralДокумент9 страницAesthetic Study On Permadi Lyosta's Works The Artist of Lekra From Takengon - Aceh CentralInternational Journal of Innovative Science and Research TechnologyОценок пока нет
- Saras Rubric ProductДокумент4 страницыSaras Rubric Productapi-311939141Оценок пока нет
- The Elephant TotemДокумент5 страницThe Elephant Totemrezareza00Оценок пока нет
- GHOTUL Tribal Youth Dormitory A Hiatus or HeuristicДокумент12 страницGHOTUL Tribal Youth Dormitory A Hiatus or HeuristicsingingdrumОценок пока нет
- Logic of DreamsДокумент4 страницыLogic of DreamsYasirОценок пока нет
- Sahajo Bai AmritVaaniДокумент4 страницыSahajo Bai AmritVaanibaldevram.214Оценок пока нет
- 2019-3 May-Paschal Mat & Div Lit Hymns - Bright Friday - Source of LifeДокумент8 страниц2019-3 May-Paschal Mat & Div Lit Hymns - Bright Friday - Source of LifeMarguerite PaizisОценок пока нет
- Lecture 5 - Figurative LanguageДокумент56 страницLecture 5 - Figurative LanguagePrivate AccountОценок пока нет
- No. 07 A'rafДокумент31 страницаNo. 07 A'rafNafee MahatabОценок пока нет
- The Rules of BackbitingДокумент8 страницThe Rules of Backbiting1halima9Оценок пока нет