Вам также может понравиться
- Ajustamento MMQ Do Livro Do CamilДокумент12 страницAjustamento MMQ Do Livro Do Camilluancaio5339Оценок пока нет
- Determinantes, matrizes e diagonalização em sistemas físicosДокумент14 страницDeterminantes, matrizes e diagonalização em sistemas físicosLuiza MonterossiОценок пока нет
- Adição e Subtração de Números FracionáriosДокумент4 страницыAdição e Subtração de Números FracionáriosWellington Laureano LinoОценок пока нет
- Equações lineares, sistemas e matrizesДокумент13 страницEquações lineares, sistemas e matrizesSanielen ColomboОценок пока нет
- Apostila Cap05Документ25 страницApostila Cap05Daniel TedescoОценок пока нет
- Bases OrtonormaisДокумент8 страницBases OrtonormaisLuis Oliveira SilvaОценок пока нет
- Matriz Positiva DefinidaДокумент14 страницMatriz Positiva DefinidaAnthonny Gabryell LimaОценок пока нет
- Edo (Armando Augusto de Castro Junior) PDFДокумент213 страницEdo (Armando Augusto de Castro Junior) PDFedfram100% (2)
- ProbabilidadeДокумент26 страницProbabilidadeAnonymous u4ZGDPОценок пока нет
- ApostilaДокумент47 страницApostilaMiguel ArcanjoОценок пока нет
- 2 Prova de Geometria Anal Itica - A2 Prof. Ms Fernando Tosini Disciplina: Geometria Anal IticaДокумент4 страницы2 Prova de Geometria Anal Itica - A2 Prof. Ms Fernando Tosini Disciplina: Geometria Anal IticaArtur SponchiadoОценок пока нет
- Lista de Exercícios de Matemática IДокумент49 страницLista de Exercícios de Matemática IMagnus KellyОценок пока нет
- MAT1154 Exponencial de matrizesДокумент14 страницMAT1154 Exponencial de matrizesJúlio César MarquesОценок пока нет
- Equações de 1o grau com uma variávelДокумент17 страницEquações de 1o grau com uma variávelEduardo CoutinhoОценок пока нет
- Ebook - PDFДокумент76 страницEbook - PDFvagner alexandreОценок пока нет
- Segundo teste de Cálculo NuméricoДокумент14 страницSegundo teste de Cálculo NuméricoMIGUELОценок пока нет
- Funções Analíticas e Séries de PotênciasДокумент7 страницFunções Analíticas e Séries de PotênciasMariana MeirelesОценок пока нет
- Lista 1Документ5 страницLista 1Emanuel McbrainОценок пока нет
- Algebra Linear (Questoes de Olimpiadas) PDFДокумент18 страницAlgebra Linear (Questoes de Olimpiadas) PDFMisael Albuquerque LiraОценок пока нет
- Resolução de ÁlgebraДокумент3 страницыResolução de ÁlgebraNEDIR APARECIDO SALESОценок пока нет
- Lista GAДокумент4 страницыLista GAma.vОценок пока нет
- Teorema espectral auto-adjuntosДокумент11 страницTeorema espectral auto-adjuntoscleonerpОценок пока нет
- Mecânica Quântica - Spin, Pentaquark e PerturbaçãoДокумент1 страницаMecânica Quântica - Spin, Pentaquark e PerturbaçãoIago RequenaОценок пока нет
- Aula 20 de Álgebra Linear I - Matrizes ortogonaisДокумент12 страницAula 20 de Álgebra Linear I - Matrizes ortogonaisDiogo PaesОценок пока нет
- Geometria e Álgebra com MatrizesДокумент61 страницаGeometria e Álgebra com MatrizesoliverОценок пока нет
- Grafos, Matrizes e o Teorema da AmizadeДокумент37 страницGrafos, Matrizes e o Teorema da AmizadeWalner Mendonça SantosОценок пока нет
- Anexo 2 APX3-AL Eng-2020-2-Gabarito NDEДокумент4 страницыAnexo 2 APX3-AL Eng-2020-2-Gabarito NDEBarbaraОценок пока нет
- Problemas DeterminantesДокумент3 страницыProblemas DeterminantesRui M. RibeiroОценок пока нет
- Caderno de Exercícios AL - 2016.2Документ77 страницCaderno de Exercícios AL - 2016.2OtavioCaesarОценок пока нет
- Cii TesteДокумент107 страницCii TesteAna Albuquerque BarataОценок пока нет
- Estruturas Algébricas - Inteiros e Indução FinitaДокумент18 страницEstruturas Algébricas - Inteiros e Indução FinitaJarbas LopesОценок пока нет
- Números complexos e suas aplicaçõesДокумент33 страницыNúmeros complexos e suas aplicaçõesPatty CoelhoОценок пока нет
- Cálculo Diferencial e Integral I: Números ReaisДокумент8 страницCálculo Diferencial e Integral I: Números Reaispedro nogueiraОценок пока нет
- Var Aleat 1Документ154 страницыVar Aleat 1Ana LopesОценок пока нет
- EDP Segunda Ordem Fourier CalorДокумент62 страницыEDP Segunda Ordem Fourier CalorVictor HugoОценок пока нет
- SebExAlgebraI (M) (05 06) PDFДокумент39 страницSebExAlgebraI (M) (05 06) PDFIsaías MassangoОценок пока нет
- Números ComplexosДокумент18 страницNúmeros ComplexosDOUGLASОценок пока нет
- Aula 11 - O Teorema Chinês Dos RestosДокумент8 страницAula 11 - O Teorema Chinês Dos Restossax91Оценок пока нет
- 3 ExercResolv e Exerc 3.4 PooleДокумент5 страниц3 ExercResolv e Exerc 3.4 PoolelataodeprasticoОценок пока нет
- Equação DiofantinaДокумент6 страницEquação Diofantinaroberta_fabianni6787Оценок пока нет
- Modelos multivariados de séries temporaisДокумент64 страницыModelos multivariados de séries temporaisFábio GamaОценок пока нет
- Aula - Simetria e Teoria de GruposДокумент35 страницAula - Simetria e Teoria de GruposIsis ReisОценок пока нет
- Álgebra LinearДокумент14 страницÁlgebra Linearmarcos limaОценок пока нет
- Autovalores e Autovetores - Alem de N 2, TomeiДокумент12 страницAutovalores e Autovetores - Alem de N 2, Tomeivic1234059Оценок пока нет
- ALG1TESTEДокумент2 страницыALG1TESTEAna Catarina CarneiroОценок пока нет
- Sistemas lineares: conceitos e resoluçãoДокумент25 страницSistemas lineares: conceitos e resoluçãoSCDОценок пока нет
- Algebra Linear AplicadaДокумент61 страницаAlgebra Linear AplicadaLyhsRavОценок пока нет
- APX3 ALI 2022 1 GabaritoДокумент4 страницыAPX3 ALI 2022 1 GabaritoNina BrandaoОценок пока нет
- Pre CalculoДокумент104 страницыPre Calculomarlonwillian1hotmail.comОценок пока нет
- MAT4154 33A Grupo5 T3 23 2Документ18 страницMAT4154 33A Grupo5 T3 23 2ClóvisОценок пока нет
- Propriedades Dos Números ReaisДокумент28 страницPropriedades Dos Números ReaisVanderlei JuniorОценок пока нет
- Apostila MatrizesДокумент57 страницApostila MatrizesMarcelo Augusto LeocadioОценок пока нет
- lista1_quantica2Документ5 страницlista1_quantica2James Guimaraes SantosОценок пока нет
- Metodo de JordanДокумент23 страницыMetodo de JordanJSO XperiaОценок пока нет
- Sistemas LinearesДокумент8 страницSistemas LinearesMatheus Oliveira RomualdoОценок пока нет
- Anotações sobre somatórios e técnicasДокумент62 страницыAnotações sobre somatórios e técnicasRenji RodrigoОценок пока нет
- Números Primos Em Sistemas Criptográficos RsaОт EverandNúmeros Primos Em Sistemas Criptográficos RsaОценок пока нет
- 5 Formas de Parar de Se Sabotar - WikihowДокумент5 страниц5 Formas de Parar de Se Sabotar - WikihowWellington FelixОценок пока нет
- Síntese Da Obra - O PrincipeДокумент5 страницSíntese Da Obra - O Principeigor_lobatoОценок пока нет
- Prova 3ano 2biДокумент4 страницыProva 3ano 2bitalmerrОценок пока нет
- Epistemologia Africana e Crise EcológicaДокумент14 страницEpistemologia Africana e Crise EcológicaCarlos MeloОценок пока нет
- Hiperonímia e hiponímia em palavrasДокумент2 страницыHiperonímia e hiponímia em palavrassandracrfdutra2866100% (1)
- Direitos Individuais e Liberdade de Expressão no BrasilДокумент3 страницыDireitos Individuais e Liberdade de Expressão no BrasilSueli Esteticista BelémОценок пока нет
- No Caminho Do Trânsito Seguro (1) Prova Do SábadoДокумент5 страницNo Caminho Do Trânsito Seguro (1) Prova Do SábadoraucfОценок пока нет
- RELATÓRIO 3 - Ótica GeométricaДокумент28 страницRELATÓRIO 3 - Ótica GeométricaAna Célia Mantovani Pagliuso100% (1)
- Stuart MillДокумент2 страницыStuart MillCatarina SilvaОценок пока нет
- BrainstormingДокумент12 страницBrainstormingsheilar_16846886Оценок пока нет
- Florais Emergência GuiaДокумент119 страницFlorais Emergência Guialuis100% (1)
- Carta de Liberação Do PerdãoДокумент4 страницыCarta de Liberação Do Perdãogomees.allyneeОценок пока нет
- Proposta para o Simulado Enem 2013Документ5 страницProposta para o Simulado Enem 2013Vagner Gonçalves Viana100% (1)
- A Crise da História no Século XXДокумент14 страницA Crise da História no Século XXCoroa Fernandes100% (1)
- Funções mentais superiores e desenvolvimento cognitivoДокумент21 страницаFunções mentais superiores e desenvolvimento cognitivoAndre Zanon100% (1)
- A análise da redenção de Jean Valjean em Os MiseráveisДокумент3 страницыA análise da redenção de Jean Valjean em Os MiseráveisDébora FrancaОценок пока нет
- AULA. 6 e 7. 1 º ANO. Metodo e Tecnica.2 SemestreДокумент15 страницAULA. 6 e 7. 1 º ANO. Metodo e Tecnica.2 SemestreEtivaldoRodriguesCgОценок пока нет
- Semântica e a natureza da línguaДокумент56 страницSemântica e a natureza da línguaTadeu carvalho gouveaОценок пока нет
- Type Cafajeste - Manual Do Sedutor (Social Game)Документ7 страницType Cafajeste - Manual Do Sedutor (Social Game)Thiago TrindadeОценок пока нет
- Cartas de Tarô: Paus e CopasДокумент79 страницCartas de Tarô: Paus e CopasEmília Garcez100% (1)
- Simulado Exame CPREFL IREB - TM - 2012 v1.2Документ25 страницSimulado Exame CPREFL IREB - TM - 2012 v1.2Sander Lemos MizaelОценок пока нет
- StylingДокумент29 страницStylingJohn's SualkОценок пока нет
- Plano de EnsinoДокумент2 страницыPlano de EnsinoFlávio BassoОценок пока нет
- Avaliação Projetiva - HTPДокумент41 страницаAvaliação Projetiva - HTPglauciamaga80% (20)
- Comunicação pública do clima e riscos de desastresДокумент49 страницComunicação pública do clima e riscos de desastresCora Catalina QuinterosОценок пока нет
- H.T.P.psicodiagnóstico - VДокумент9 страницH.T.P.psicodiagnóstico - VKarina Stagliano de Campos0% (1)
- Iluminação cênica obra iluminadora Jamile TormannДокумент14 страницIluminação cênica obra iluminadora Jamile TormannPedro FelizesОценок пока нет
- Vittude Guia Completo Das Principais Abordagens Da Psicologia 2Документ49 страницVittude Guia Completo Das Principais Abordagens Da Psicologia 2GuilhermeОценок пока нет
- A Batalha Pela Sua MenteДокумент32 страницыA Batalha Pela Sua MenteAlexandre SilvaОценок пока нет
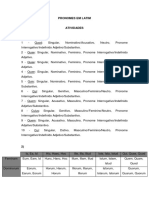
- Pronomes em Latim: Gêneros, Casos e FunçõesДокумент2 страницыPronomes em Latim: Gêneros, Casos e FunçõesJosimar OliveiraОценок пока нет