Академический Документы
Профессиональный Документы
Культура Документы
Appendix D - Procedures & Field Work Ref Docs
Загружено:
Hood Abdul RazakИсходное описание:
Авторское право
Доступные форматы
Поделиться этим документом
Поделиться или встроить документ
Этот документ был вам полезен?
Это неприемлемый материал?
Пожаловаться на этот документАвторское право:
Доступные форматы
Appendix D - Procedures & Field Work Ref Docs
Загружено:
Hood Abdul RazakАвторское право:
Доступные форматы
OFFSHORE SOIL INVESTIGATION SAFETY PROCEDURE
1.0 1.1
PURPOSE This safety document contains the safety practices that are to be adhered to by all FSEAG employees when working on drillships. This module does not take precedence over any documented practices maintained by the vessel owner/operator. The Captain has the overall responsibility on board the drillship, with the Chief Mate as his deputy and safety officer. The Captain is, therefore, ultimately responsible for ensuring that the survey operation are being carried out in accordance with existing safety rules, regulations and special contractual procedures. The survey work is, however, an integrated assignment requiring co-operation between the crew of the vessel, the positioning contractor, the geotechnical contractor and the consultants. It is the responsibility of all parties involved in drillship operations to ensure that sound safety practices are maintained throughout offshore site investigation projects. It is therefore important that all personnel, in addition to the crew of the vessel, have knowledge and experience of safety equipment, the safety rules and regulations and must also be aware of any special rules or regulations in force on the particular vessel. Each party shall inform the other and also the ship's Captain and Client's Representative of any inadequacies and unsafe working practices observed in equipment and procedures. To this end, it is a requirement that all appropriate individuals attend a meeting to discuss the safety aspects of the drillship operations at mobilisation and, thereafter, on a weekly basis and when the need arises. In addition, it is recommended that the Client's Representative, the ship's Captain and the geotechnical contractor's Team Leader shall form a group to discuss cessation of work whenever one of these parties feel that drillfloor operations or any other operations are becoming unsafe. These meetings and discussions should be minuted and form the basis of any dispute should one or more of the parties disagree. Finally, remember that all the safety procedures contained within the other Safety Work Practices will apply offshore as well.
1.2
2.0
SCOPE This work practice details the safety procedures for offshore operations carried out from self propelled ocean going vessels or deep water fixed platforms/jack-up rigs. The work practice that details the safety procedures for operations in up to 20 metres water depth on either floating or fixed working platforms having no accommodation facilities is Working Over Water Procedure.
3.0
REFERENCES The following documents are related to this procedure: Title Safety Induction Procedure Warehouse Safety Procedure Hazard Identification & Risk Assessment Procedure Onshore Soil Investigation Safety Procedure Working Over Water Procedure
4.1 4.3 4.4 4.5 4.7
DOC REV / DATE
: FSEAG-HP-1 OFS-OFFSHORESOILINVESTIGATIONSAFETY.DOC : 0 / SEP-02
PAGE
1 OF 6
OFFSHORE SOIL INVESTIGATION SAFETY PROCEDURE
4.0 4.1
DEFINITIONS Offshore Work The offshore work referred to in this procedure is any work that is carried out by the employees of Fugro Singapore Pte Ltd, PT Kalvindo Raya Semesta, or Fugro Geosciences (Malaysia) Sdn Bhd from any offshore vessel or platform. Work carried out in the nearshore environment is also covered in work procedure Working Over Water.
5.0 5.1
RESPONSIBILITIES It is the responsibility of all employees while working offshore to adhere to these procedures to minimise the risk of injury to themselves and to their colleagues.
6.0 6.1 6.1.1
PROCEDURES Safety Drill and Equipment Prior to Mobilisation The Team Leader shall read the contract and contingency plan for the vessel prior to mobilisation. Important safety aspects of new and special operations shall be discussed with the vessel contractor/geotechnical contractor and/or client prior to mobilisation. All personnel on board shall be able to produce a valid medical and survival certificates.
6.1.2
Mobilisation During mobilisation the following actions shall be performed: All equipment installed on board shall be properly checked from a safety point of view and valid certificates covering the actual survey operation shall be available. This applies to equipment as well as to the storage and use of dangerous materials including gases, liquids and mud. Safety shall be a key item on the agenda for the kick-off meeting on board the vessel. If required by applicable regulations, survival suits shall be placed at suitable areas chosen from a safety and operational point of view. Rafts shall also be placed in areas with easy access from the drilling deck, laboratories and other working areas. All personnel on board the vessel for the first time or after a long absence shall attend an induction lecture given by the vessel's safety officer which will include a tour around the vessel highlighting the escape routes, lifeboat stations and muster points.
DOC REV / DATE
: FSEAG-HP-1 OFS-OFFSHORESOILINVESTIGATIONSAFETY.DOC : 0 / SEP-02
PAGE
2 OF 6
OFFSHORE SOIL INVESTIGATION SAFETY PROCEDURE
Prior to sailing an induction will be given to staff who are on the vessel for the first time. This shall be given by the safety officers on board the vessel covering the following main topics: Alarm systems and signals, lifeboat and emergency stations. Emergency procedures, highlighting procedures related to work on the drill deck. Fire systems including the principles of fire fighting. Escape routes. Personnel safety.
The alarm signals and location of the lifeboat and emergency stations shall be clearly stated on a poster in each cabin. A separate booklet summarising the main objectives of emergency procedures shall be available in each cabin for all personnel on board. 6.1.3 Work on Location The lifeboat and safety drills (fire and shallow gas) shall be repeated at least every fortnight. In special cases the Client may require such drills every week. The Team Leaders shall have a responsibility to motivate their personnel to be "safety minded". The status of overall safety shall be discussed between the Captain/Safety officer, Client's Representative and Team Leaders not later than one week after arrival on location and thereafter every week.
6.1.4
Demobilisation Any points arising from the Safety Drills and training shall be summarised and reported in a general debriefing meeting related to the fieldwork.
6.2 6.2.1 1. 2. 3.
Safety in Offshore Operations Safety Rules Only authorised personnel shall be allowed access to the drillfloor. Life jacket vests, safety harnesses and survival suits shall be readily available on the drillfloor. Safety boots, hard hat and suitable overalls shall be worn at all times when working on the drillfloor and its vicinity. Each worker must convince himself on the safety provisions at his work site before commencing work. The driller and the geotechnical shift leader are jointly responsible for the safety of drillfloor operations during the shift. Each must notify their respective personnel on the subsequent shift of any occurrences during their working hours which may affect the safety of personnel engaged in drillfloor operation.
4.
5.
DOC REV / DATE
: FSEAG-HP-1 OFS-OFFSHORESOILINVESTIGATIONSAFETY.DOC : 0 / SEP-02
PAGE
3 OF 6
OFFSHORE SOIL INVESTIGATION SAFETY PROCEDURE
6. 7.
Goggles and face masks must be worn by mud mixers. Mud shall be washed off all tools on deck and the deck and walkways shall be washed down regularly and kept clear of mud. Appropriate type of safety harnesses shall be worn in every situation where there is a risk of falling. When working in the moonpool, over the site or wherever there is a risk of falling overboard, a life jacket work vest shall also be worn. When appropriate, survival suits should be used. Working shall not be permitted in the moonpool below the drillfloor unless the vessel is stationary on anchors or under dynamic position control. Furthermore, no work shall be undertaken in the moonpool in adverse weather conditions. Work in the moonpool shall only be undertaken with another crew member in attendance and shall be supervised by an Officer with a hand held VHF so that contact to the bridge for "man overboard" can be made in emergencies.
8.
9.
10.
All work areas shall have adequate lighting for night working and the moonpool should have permanently fixed lights. Only general maintenance of seabed reaction frames should be performed in the moonpool. Major repairs or modifications shall be undertaken with the reaction frame on deck or whilst the vessel is in sheltered waters. All containers within the vicinity of the derrick should be able to withstand potential impact damage. Containers shall be fixed to the deck. The Safety officer has overall responsibility to ensure that all equipment is securely fastened down. This does not, however, alleviate the responsibility of the geotechnical team leader and senior driller to ensure that their own equipment is securely fastened before leaving port of mobilisation. All winches shall have adequate safety mechanisms. No person shall leave a manually operated winch unattended for whatever reason for period of time when the winch is being used. During the raising of a tool or sampler up the drill pipe, all winch lines shall be clearly marked in at least two places to indicate when the tool is about to reach the power swivel mud valve. Hoisting and lifting equipment must be in good condition and inspected at regular intervals according to manufacturers instructions. Ships cranes must only be operated by trained, experienced and authorised operators. Either the senior operator/technician or the geotechnical shift leader must be in direct communication with the winch operator during the raising and lowering of seabed reaction frames. Gas cylinders and oil drums must be properly secured and must be clear of the drill floor.
11.
12.
13.
14. 15.
16.
17.
18. 19.
20.
DOC REV / DATE
: FSEAG-HP-1 OFS-OFFSHORESOILINVESTIGATIONSAFETY.DOC : 0 / SEP-02
PAGE
4 OF 6
OFFSHORE SOIL INVESTIGATION SAFETY PROCEDURE
21.
All equipment not routinely required for drilling and sampling operations should be stored remotely from the drilling area. Welding or cutting shall be undertaken by qualified persons only after prior approval ("permitto-work") by the Safety Officer. Suitable eye protection and personnel protective equipment shall be worn. All gas cylinders shall be checked for leaks and carefully turned off at the end of a job. Welding or cutting shall never be attempted near flammables or near electrical installations or cables. Due care and attention shall be taken whilst handling wireline equipment due to the potential relative motion between such equipment and the drillfloor and power swivel. Sufficient hand railing and grating shall be provided above the power swivel to enable safe handling of the downhole tools. Special safety procedures shall be identified and followed when using potentially hazardous tools such as the nuclear density probe. Shallow Gas Hazards When there is indication of the presence of shallow gas in the soil layers to be drilled through, special procedures must be established identifying all phases and measures relevant to the problem. Even where no evidence of the presence of shallow gas exists personnel should still bear in mind the following points: Shallow gas may occur in any sediment overlying petroleum reservoirs. Seismic records may indicate the presence of gas but no one can judge the gas mobility before drilling. Of special concern for soil investigation work is shallow gas accumulated in sand layers or pockets within the investigation depth (normally limited to depths of 150m below seabed). It is not always possible to tell whether any layer is sand from the seismic records unless correlation is possible with previous soil borings. Although clear anomalies on seismic records indicative of shallow gas are often found in clay deposits they do not, generally, constitute a high safety hazard. Pressure in shallow gas pockets will normally be limited to hydrostatic pressure. Maximum pressure is believed to be hydrostatic pressure at the "bottom" of the gas pocket. The type of gas can be of biogenic or petrogenic origin, but will, in both cases, primarily be methane, which is highly flammable. The nature of shallow gas "kicks" is characterised by: * No warning, or very short warning (few minutes). High pressure of direct communication is established through drillstring between drillfloor and the gas pocket.
22.
23.
24.
25.
6.3
DOC REV / DATE
: FSEAG-HP-1 OFS-OFFSHORESOILINVESTIGATIONSAFETY.DOC : 0 / SEP-02
PAGE
5 OF 6
OFFSHORE SOIL INVESTIGATION SAFETY PROCEDURE
Because of the above characteristics, the main objective for any general procedure taking shallow gas into account should reflect: * Make every effort to avoid shallow gas at the drillfloor or around/on the ship. To make this possible, the following measures should have been carried out by the Client:
1. 2.
Shallow geophysical investigation followed by careful interpretation by qualified experienced experts. Avoid drilling in potential hazardous areas.
When shallow gas is believed to be present on a site a specific procedure needs to be established for that work.
- End of Document -
DOC REV / DATE
: FSEAG-HP-1 OFS-OFFSHORESOILINVESTIGATIONSAFETY.DOC : 0 / SEP-02
PAGE
6 OF 6
SITE INVESTIGATION PROCEDURES AND TECHNIQUES Drilling, Sampling and Piezocone Penetration Testing
1.0
GENERAL Information on soil conditions included in this report was obtained by a soil boring drilled from the dedicated survey vessel M/V Mariner which was anchored at the study location. Drilling was carried out using a motion-compensated, top drive Fugro Offshore Drilling Rig (FODR) mounted over a centre-well installed through the hull of the vessel. Personnel for carrying out drilling and sampling operations included a Senior Lead Engineer, a Soils Engineer, two Soil Technicians, two Drillers and several roughnecks.
2.0
ANCHORING AND POSITIONING OF VESSEL The vessel anchoring system is composed of two 3-drum hydraulic driven winches (6,000 ft 1 of wire/drum) and 6,600 lbs. high holding power Delta Flipper anchors, with maximum pull of 34 tons. The Vessel Captain together with the Chief Engineer perform all anchoring manoeuvres. The Captain provides the Surveyor with a plot plan showing desired anchor locations and the Surveyor in turn guides the Captain/ vessel while the anchors are brought out by the anchor handling vessel.
3.0
DRILLING RIG The rig utilises a straight mud flush rotary drilling system with 5-inch (127-mm) API standard drillstring and an open 8.5-inch (216-mm) O.D. wing bit. An open top power swivel was used by the rig. The power swivel, which threads directly onto the top of the drillstring, is an efficient means of transmitting torque with good bit load and movement control. Also, the swivel has a fixed connection to the mud system and allows the passage of testing tools/samplers through its top without disconnecting the drillpipes, even while operating in a compensated mode. The swivel has a wide range of speeds to allow drilling in soft soils and hard rocks (rotational speed 32-400 rpm, the torque 175-2200 kgm).
4.0
DRILLING AND SAMPLING PROCEDURES The borehole was advanced using a 5-inch (127-mm) API standard drill pipe with an open-centre drag bit which permits use of a push, piston or percussion sampler. Drilling was performed using a rotary procedure and the hole was stabilised generally with seawater. The seawater was circulated at a rate of 400-500 l/min. However, on occasions, particularly when drilling through granular strata, drilling mud was used to stabilise the hole and to aid removal of cuttings. The mud was made up of guar gum mixed with seawater ballast, circulated typically at 40-50 sec. Marsh funnel viscosity at a pumping rate of about 250 l/min. In certain occasion when the hole collapsed, viscosity was increased to 50-60 sec. for development of filter cake. In soft soils, piston sampler was used. The sampler utilises a thin-walled tube of 76-mm O.D., 72-mm I.D. The unit is lowered down the inside of the drillstring on a standard umbilical cable. Upon reaching the drill bit it latches automatically into a seating umbilical cable. Upon reaching the drill bit it latches automatically into a seating sub-assembly. A thrust from drillstring and/or the Seaclam reaction force was then applied. Throughout the sampling operation, the piston remains in a fixed position in contact with the soil, and the sampling tube is pushed in a controlled manner into the soil at a constant rate of 20 mm/sec. Piston sampler is designed as P in the boring logs and samples inventory.
SI-M-010
October 2002
Page 1 of 3
SITE INVESTIGATION PROCEDURES AND TECHNIQUES Drilling, Sampling and Piezocone Penetration Testing
An alternative to the Wipsampler was the use of 57-mm O.D., 53-mm I.D. thin-walled tube percussion sampler. The sampler was driven into the soil using a 79.5 kg downhole sliding hammer, dropped approximately 1.5 m a sufficient number of times to secure the desired 0.6 m penetration, or to a maximum of 30 blows. The sampler is designated a H in the sampler inventory. In a cemented sand, very hard clay or weathered rock formation, a 51-mm O.D. split barrel sampler with core catcher was used. The sampler was also driven using the above sliding hammer to the desired 0.45-m penetration, or also to a maximum of 30 blows.
5.0
IN-SITU TESTS The advanced technology and engineering design procedures in geotechnical studies for both onshore and offshore (underwater) investigations requires special design equipment. Modifications of basic land equipment and offshore oil drilling equipment together with in-house new developments have result in the Seaclam (Seabed re-entry frame) and the Wison (small diameter cylindrical apparatus with an overall length of 6.0 m).
6.0
SEACLAM SYSTEM The Seaclam consists of frame, which rests on the seabed during drilling operations and serves as a re-entry base. It can be clamped onto the drillstring, by a hydraulically operated pipeclamp, to stabilise the drillstring vertically and to increase the reaction during downhole testing and sampling (both operations can be performed from mudline to the final borehole depth). The Seaclam is lowered to the seabed at the designated borehole location. Then the drillstring is spudded along the lifting wires into the wide smoothsided funnel, by means of a huge frame. This latter procedure is also followed when re-entry of the borehole has to be made. If the drillstring is to be fixed, the pipe clamp is hydraulically activated via a single hose from the surface. Upon completion of the sampling or testing the pipe clamp is released and drilling is resumed. Every time the drillpipe, drillcollars for bit load and the special designated open-drag bit reach the testing depth, the Wison downhole tool is lowered through the drillstring by an electron-hydraulic cable (umbilical cable). The downhole tool locks into a special drillcollar-sub around 4.0 m above the drillbit while it actually rest on the bit. The locking enables to transfer the required reaction force to push the cone into the soil to the drillcollar and drillpipe and subsequently to the seabed reaction frame. The actual length of the best stroke is nominal 3.0 m although it can be less due to the soil resistance and the available reaction force. The cone penetrometer is pushed into the soil at a constant speed of 2 cm/sec. The hydraulic pressure of the system can be regulated while penetrating to prevent damage of the cone tip when very high cone tip resistance are encountered. At the end of each stroke the downhole is withdrawn from the soil by lifting the drillstring followed by hoisting the umbilical cable till the Wison is back to deck. After performing an in-situ test drill, drilling will continue to the following test depth. The piezocone penetrometer connected to the bottom part of the Wison rods gives a continuous record of the dynamic pore pressure, cone resistance and sleeve friction from the moment the tool is lowered into the drillstring till the tool is back on deck. Recording of the digital transmitted signals is alone every 10 sec. or 4 times per second depending on the requirements and test stage.
SI-M-010
October 2002
Page 2 of 3
SITE INVESTIGATION PROCEDURES AND TECHNIQUES Drilling, Sampling and Piezocone Penetration Testing
The piezocone penetrometer is a standard electrical friction cone penetrometer with an in-built pressure transducer and a plastic or ceramic filter in the cone base or just above. The cone tip itself is a 10 or 15 cm2 point with a 60 apex angle while the friction area just above the cone is 150 or 200 cm2. The cone resistance as well as the friction are measured by means of electrical strain gauges (loadcells) near the area where the forces are acting. The electrical signal are then transmitted to an electronic module in the downhole tool to the data acquisition system on deck the data is digitally transmitted whereafter stored on a 3.5 in. floppy diskette. All different types of test data are chronological stored in the diskette. After a borehole is completed, the collected data will be processed and plotted with a specially developed program. The program allows quality checks on the raw data as well offset corrections, start and stop of test, disturbed zones and generally information such as location, co-ordinates and reference level can be entered.
7.0
WATER DEPTH MEASUREMENT Water depth was determined at each borehole location prior to drilling, sampling and PCPT, and coring operations. The time when measurement was taken was also recorded for making correction due to tide level variation. Approximate initial water depth was measured using ships under the keel echo sounder. Drillstring was then lowered carefully to a depth off but close to the sea bottom. Sampler or piezocone followed, deployed through the inner bore of the drillstring. Sampler recovery or cone reading when touching the seabed was then used to determine more precise water depth. In the absence of PCPT, an electronic bottom sensor was used instead. The sensor was deployed through the drillstring. The drillstring was then lowered until the sensor got activated while tagging the seabed.
8.0
OFFSHORE LABORATORY TESTING AND SAMPLE PACKAGING Offshore laboratory tests consisted of visual classification, water content determination, and measurement of wet unit weight and undrained shear strength. Each sample was extruded from the sample tube in the field and then carefully examined and classified by our Field Engineer or Soil Technician. After testing, all samples were packaged for shipment to our onshore laboratory for additional testing.
SI-M-010
October 2002
Page 3 of 3
MOBILISATION / DEMOBILISATION OF VESSEL EQUIPMENT PROCEDURE
1.0 1.1 PURPOSE To define the actions required to mobilise and demobilise the drilling and downhole equipment onto the Vessel.
2.0 2.1
SCOPE It covers the mobilisation of the drilling and downhole equipment onto the Vessel including equipment, methods and personnel required.
3.0 3.1
REFERENCES Fugro Equipment Manuals
4.0 4.1 4.2 4.3 4.4
DEFINITIONS & ABBREVIATIONS FSIN FEBV Wison PCPT SEACLAM Fugro Singapore Pte Ltd Fugro Engineers BV Wireline Downhole in-situ probing device Seabed frame for clamping casing/drillpipe
5.0 5.1
RESPONSIBILITIES The Equipment Manager (FEBV) is responsible for ensuring all FEBV equipment (ie downhole sampling and in situ testing) is checked and transported to the vessel. The Vessel Chief Engineer is responsible for ensuring that all vessels drilling equipment is operational. The Vessel Master has control over and is responsible for all drill floor operations. The Senior Operator (FEBV) is responsible for the correct installation/assembly of all FEBV equipment.
5.2
5.3 5.4
6.0 6.1
PROCEDURES AND EQUIPMENT The following equipment shall be prepared and procedures followed during mobilisation.
DOC REV`/ DATE
: 3 MDV-MobDemobVesselEquipment.doc : 1 / MAR-06
PAGE
1 OF 2
MOBILISATION / DEMOBILISATION OF VESSEL EQUIPMENT PROCEDURE
6.2 Vessel Equipment/Procedures (FSIN) 1. 2. 3. 4. 5. 6. 6.3 General maintenance. Check/test equipment (mooring/drilling). Clear workdeck and store equipment not in use in designated storerooms. Load consumables (engine/deck stores). Load fuel and lubes. Load provisions and freshwater.
FEBV Equipment/Procedures 1. 2. 3. 4. 5. 6. 7. 8. Rig umbilical through derrick. Remove sounding/sampling tools from tweendeck onto deck. Load spare parts for CPT sampling equipment. Connect hydraulic hose on Seaclam. Install equipment on Seaclam frame (as required). Check hydraulic oil levels in powerpacks. Connect umbilical on tools and perform complete system check. Seafasten CPT/sampling equipment and spares.
7.0 7.1
SAFETY A job hazard analysis shall be made prior to all non-uniform operations and all personnel involved shall read and if necessary implement additional safety measures as required.
DOC REV`/ DATE
: 3 MDV-MobDemobVesselEquipment.doc : 1 / MAR-06
PAGE
2 OF 2
DRILLING & DOWNHOLE OPERATIONS PROCEDURE
1.0 1.1
PURPOSE The purpose of this work practice is to define the actions to be taken by the drilling crew and the in-situ testing and sampling crew during drillfloor operations.
2.0 2.1
SCOPE This work practice covers the drillfloor operations on vessel including equipment, methods and personnel.
3.0 3.1 3.2
REFERENCES Fugro Equipment Manuals Equipment Data Sheets
4.0 4.1 4.2 4.3 4.4 4.5 4.6 4.7
DEFINITIONS & ABBREVIATIONS FSIN FEBV Wison PCPT SEACLAM BHA UGF DC Fugro Singapore Pte Ltd Fugro Engineers BV Wireline Downhole in-situ probing device Seabed frame for clamping casing/drillpipe Bottom Hole Assembly Underwater Guide Frame Drill Collar
5.0 5.1
RESPONSIBILITIES The Equipment Manager (FEBV) is responsible for ensuring all FEBV Equipment ie downhole sampling and in-situ testing are checked and transported to the vessel. The Vessel Chief Engineer is responsible for ensuring that all vessels drilling equipment is operational. The Vessel Master has overall control and responsibility for all drillfloor operations. The FEBV Operator is responsible for the all FEBV equipment, including the Seaclam operations and downhole tools.
5.2
5.3 5.4
DOC REV / DATE
: FSEAG-HP-4 DDO-DrillingDownholeOperations.doc : 0 / SEP-02
PAGE
1 OF 6
DRILLING & DOWNHOLE OPERATIONS PROCEDURE
6.0 6.1
PROCEDURES Drilling operations shall be conducted using standard API drill pipe and rotary open hole drilling methods using the vessels main rig. The drillfloor shall remain off limits to all unnecessary personnel. During drillfloor operations all non-essential personnel shall get the permission of the Driller present on shift before entering or crossing the drillfloor. Pre-Drilling Operations 1. 2. 3. 4. 5. 6. 7. 8. 9. 10. 11. 12. Ensure that all hydraulic power is switched on (Drillwinch, Swivel, Freefall winches, Mudpumps). Ensure that accumulator pack for the drillstring heave compensator is charged. Ensure valves of line tensioner are open. Ensure that heavy loadwinch is switched on prior to deploying seabed frame. Ensure that the air compressor (working air) is switched on (air tuggers, drillwinch brake, bottom sensor winch). Check rotation of drill winch. Check deck pipe clamp (bottom clamp). Check pipe clamp swivel head. Check pipe lift. Check back up tongs (dies ok). Check that elevators for drillcollars and drillpipes are on drillfloor. Test bottom sensor winch + bottom sensor.
6.2
6.3
6.4
Stringing Drill Pipes 1. 2. 3. 4. 5. 6. 7. 8. 9. 10. 11. Clamp drill bit in deckclamp. Roll BHA into pipe gutter. Insert pupjoint (3 ft drillpipe) into swivel, screw on and close swivel clamp. Lift joint with airtugger. Lift BHA with pipe lift and connect airtugger wire. Tilt swivel and pull BHA (with tugger) to the pin of the pupjoint, screw BHA onto pupjoint. Lower pipe lift, remove tugger wire and lift BHA (with drill winch). Lower BHA in side box of drillbit and screw together (torque). Open deck clamp and lower BHA in moonpool. Stop lowering BHA about 30 cm from tooljoint and clamp the BHA in the deckclamp and install safety clamp. Unscrew the pupjoint and crossover from the BHA. Roll drillcollar in the pipe gutter and lift with pipelift and tugger winch against swivel, screw drillcollar on to cross over and lift drillcollars on to BHA and screw (torque) together. (After stringing drillcollars, the drillpipes have to be added until the bit almost reaches the seafloor). Unscrew pupjoint from crossover and tilt the swivel, lift drillpipe with pipe lift and attached tuggerwire, join pup joint and drillpipe (screw on) and lift drillpipe on top of crossover, screw pipe on crossover, remove safety clamp and open deckclamp, lower drillcollars and drillpipes down.
PAGE : 2 OF 6
12.
DOC REV / DATE
: FSEAG-HP-4 DDO-DrillingDownholeOperations.doc : 0 / SEP-02
DRILLING & DOWNHOLE OPERATIONS PROCEDURE
13. 14. 15.
Repeat 12 until approx 1 mtr off seafloor. Lower bottom sensor through the swivel (open mud valve) until sitting in the bit, leaving approximately 2 m slack on cable. Lower drillstring down until bottom sensor touch the bottom (indicator near drilling console), mark the drillstring when bottom sensor indicates the seafloor. Lift bit off bottom again. Retrieve the bottom sensor.
Note: The motion compensator from the start of stringing to be in open mode i.e. motion compensator pulling more than the weight of the drillstring (rod is complete inside the compensator). 6.5 Drilling Procedures 1. 2. Lower drillbit to seafloor by means of decreasing the pull of the motion compensator (release air). When the bottom mark on the pipe reaches the deckclamp, the geotechnical operator activates the Seaclam (the motion compensator to be in open mode at all times when Seaclam is activated.) The mud valve opened to allow access for the tools to go through. After completion of the test the operator opens the Seaclam (can be checked by the driller by means of indicator near drilling console). The motion compensator is locked and the tool pulled out of the soil using the drillwinch. After the tool is retrieved the mudvalve is closed and the mudpump started.
3. 4. 5. 6. 7.
The drillbit is lowered and when close to the seafloor or bottom of hole the compensator to be opened. 8. Rotate the drill bit and increase or decrease the weight on the drill bit (if required). 9. At required drilling depth, stop rotation and mudpump, and open mudvalve. 10. Repeat Items 2 through 9 until final depth reached or new pipe required (11 to 13 below). 11. After drilling away one complete drillpipe, another drill pipe to added. 12. Stop rotation and mudpump, lock compensator lift drillpipe off bottom of hole, clamp drillpipe in deckclamp, install safety elevator. Unscrew pupjoint from drill pipe and lift and tilt swivel. 13. Roll drillpipe in gutter, lift pipe with pipelift and tuggerline, pull drillpipe. against pupjoint and join together (screw).Lower pipe lift and remove tugger wire, pull pipe on top of elevator, open deck clamp, lower down string almost to bottom of hole, open compensator, rotate string. 6.6 Pulling Drill Pipes Upon completion of borehole, drillstring is pulled back on deck. 1. Clamp the drillstring in the deckclamp approx 30-cm under the tooljoint and install safety elevator. 2. Stop mud circulation, open the swivel head clamp, break the pup joint from the drill pipe, pull the pupjoint and tilt the swivel, attach the tugger wire on the pupjoint and open the swivelhead clamp, lower pupjoint on deck and remove. 3. Lower the swivel over the drillpipe hanging on the deckclamp and screw together. Close the swivelhead clamp, open deckclamp. 4. Pull pipes 30 cm underneath next pipe tooljoint. 5. Close bottom clamp, install elevator. 6. Open swivel head clamp, unscrew pipe from swivel, close swivelhead clamp.
DOC REV / DATE : FSEAG-HP-4 DDO-DrillingDownholeOperations.doc : 0 / SEP-02 PAGE : 3 OF 6
DRILLING & DOWNHOLE OPERATIONS PROCEDURE
7. 8. 9. 10. 11. 6.7
Unscrew drill pipe. Lift drill pipe. Put thread protector on. Connect tugger wire. Lower drillpipe while pulling on tugger wire, raise pipelift. When pipelift is supporting drill pipe, open swivel head clamp and pull on tugger wire, pipe will come out of swivel head. Lower pipelift and roll pipe in the designated area. Continue pulling pipes following Items 3-10 above until drillcollars are reached.
Pulling Drill Collars 1. 2. 3. 4. 5. 6. 7. 8. Open swivelhead clamp, insert pupjoint inside swivel head by means of tugger winch, screw in swivel, close swivelhead clamp. Put pupjoint on top of crossover and screw in (not too much torque). Pull drillcollar until next drillcollar is 30 cm above deck clamp. Install safety clamp, close deckclamp. Unscrew drillcollars by means of backup tong and tugger winch. Pull up drill collar and attach tugger wire. Lower DC while pulling with the tuggerwire on the DC, raise pipelift. After the drillcollar is supported by the pipelift, rig one chain tong. Unscrew the drillcollar from the pup joint. Lower the pipelift and roll the DC in the designated area. Continue pulling drill dollars following 2 through 8 above.
6.8
Deploying Seaclam 1. 2. 3. 4. 5. 6. 7. 8. 9. 10. Check with Master for permission to start operations. Ships Engineer to start heavy load winch. Geotechnical Operator start Seaclam self-tensioning winch. Chief Engineer check settings of line tensioner. Raise Seaclam approx 5 cm. Deck crew to remove lashings from Seaclam in the moonpool. Driller lower drillbit and drill pipes through the UGF. After the bit has passed the UGF, close the door of the UGF. After all personnel have left the moonpool and the moonpool grating is closed, deployment of the Seaclamp can start. The Seaclam is lowered by the Master, Mate, Driller or Senior Operator. After the Seaclam has touched the seabed, the line tensioner will stroke in and the operator will continue lowering until half of the stroke of the line tensioner is reached. After monitoring the line tensioner movements and observing no negative performance the drilling operation may commence.
11.
6.9
Working with Backup Tongs 1. 2. 3. 4. 5. 6. 7. Ensure that the tong dies are in good condition. Ensure that free-fall winch and tugger winches are operational. Ensure that safety slings are attached to their anchor points and ready for deployment. Ensure that the left hand turning and right hand tongs are standby on the drillfloor. Lift back-up tong with free fall winch to required height. At the required height engage free-fall winch brake. Place backup tong on the drill string and swing the tong arm to appropriate position (position is dependent on whether action is unscrewing or screwing together of connections). Connect safety sling to prevent excessive movement of the backup tong.
PAGE : 4 OF 6
8.
DOC REV / DATE
: FSEAG-HP-4 DDO-DrillingDownholeOperations.doc : 0 / SEP-02
DRILLING & DOWNHOLE OPERATIONS PROCEDURE
9. 10. 11. 12.
Connect tugger winch and apply slight tension on the tugger winch wire rope. Drill crew and personnel move away from tong to a safe position on the drill floor. Tugger winch operator applies tension to the tugger winch wire rope until the connection is either made up or unscrewed. After completion of the task remove backup tong and secure safely away from the drillstring
6.10
Retrieving Seaclam After completion of borehole, the Seaclam will be pulled into the moonpool. 1. 2. 3. Ships Engineer to start heavy load winch. Once communication has been established between winch operator and driller, the retrieving of the Seaclam can commence. Open the brake and start raising slowly until the line tensioner rod is pulled out completely. Watch the hydraulic gauge and when the pressure decreases the Seaclam is off bottom. Pull full speed on the winch until Seaclam is close to the bottom of the vessel, (this can be checked on the echo sounder). Pull the Seaclam slowly into the moonpool, directed by the driller on the drillfloor. When Seaclam is in the moonpool, chains are connected and the Seaclam lowered onto the chains. The weight of the Seaclam to be divided over the hoisting wire and chains.
4. 5. 6.
6.11
Sampling/In-situ Testing Procedures 6.11.1 1. 2. 3. 4. 5. 6. 7. 8. 9. FEBV Hydraulic Push/CPT Systems
10. 11. 12. 13.
14.
All electric and hydraulic systems are operational (switched on) Before starting Sampling/Insitu testing operations the equipment is tested and checked. The mousehole pipes are installed in the drillfloor (designated holes) The high pressure waterpump is connected to the mouse hole pipe and the backup tank filled with seawater. The Sampler (Piston or WIP Sampler) is connected to the umbilical. The Sample tube is connected onto the sampler. The Sampler is lowered in the mousehole pipe and the waterpump started to move the piston to the top position. Driller reports that the drillbit is at the required depth. The Sampler will be lifted from the mousehole pipe (mousehole valve to be opened) and mud valve on powerswivel opened, the Sampler is lowered through the mudvalve and drill pipe until it reaches the landing ring in the drill bit. The operator checks if the Sampler is latched in the BHA by observing the locking indicator. When the Sampler is locked the operator tells the driller that he can activates the Seaclam. The indicator near the drillers console allows the driller to see if the Clamp is closed or open (red light closed green light open). The operator pushes the sample tube (hydraulically) into the soil (monitoring the penetration of the sample tubes and the pressure require on his computer screen). When the max penetration is reached the operator deactivates the Seaclam. The driller then asks the operator to raise the drillpipe approx 1 mtr to pull the sample tube out of the soil.
PAGE : 5 OF 6
DOC REV / DATE
: FSEAG-HP-4 DDO-DrillingDownholeOperations.doc : 0 / SEP-02
DRILLING & DOWNHOLE OPERATIONS PROCEDURE
15.
16. 17. 18.
After the sample tube is out of the soil, the operator pulls the Sampler out of the drill pipe and swivel and lower to about 1 mtr above deck.(guided by the roughneck in the rooster box) The sample tube is removed and an empty clean sample tube is put on. The sampler with sample tube inserted in the mousehole pipe. The driller then drills down to next required testing/sampling depth.
For PCPT - The procedure is the same except: the rod has to be pushed back max 3 mtrs (depending on penetration of the cone). driller has to pull the PCPT rod out of the seafloor a maximum 3 mtrs. operator has to monitor the cone resistance, sleeve friction and pore pressure during the test. 6.11.2 1. 2. 3. 4. FSIN Drop Push System
Connect drop push assembly (overshot and sampler) onto free-fall winch. Attach sample tube. Start free-fall winches. After driller reports that he has reached required penetration, push sampler raised into roosterbox and through powerswivel (guided by roughneck in roosterbox). 5. Driller raises drillpipe approx 1.5 m above bottom of borehole. 6. Winch operator lowers sampler until seated in drillbit (winch wire becomes slack). 7. Driller lowers drillpipe slowly approximately 1.5 m, pushing sample tube into the soil. 8. Driller raises drillpipe approximately 2m and free-fall winch operator pull sample to deck. 9. Remove sample tube. 10. Drillers then drills down to next required sampling interval.
7.0 7.1
SAFETY Overall Supervision of the drill floor shall be under the direct supervision of the Vessels Master and in his absence the Driller on shift. All non-essential personnel shall obtain permission from the Driller on shift before crossing or performing any operations on the drillfloor. All operations shall be carried out by experienced personnel. A job hazard analysis shall be made prior to all operations and all personnel involved shall read and if necessary implement additional safety measures as required. - End of Document -
7.2
7.3 7.4
DOC REV / DATE
: FSEAG-HP-4 DDO-DrillingDownholeOperations.doc : 0 / SEP-02
PAGE
6 OF 6
GEOTECHNICAL BOREHOLE
INTRODUCTION This document describes borehole activities for a geotechnical project. The activities comprise borehole drilling and, optionally (1) in-situ testing in borehole and/or (2) sampling and sample handling. The common drilling techniques for onshore and nearshore projects are: - Open-hole drilling: a drilling method whereby all material within the diameter of the borehole is cut, such as open-hole rotary drilling, cable percussion drilling and auger drilling. - Open-hole rotary drilling: an open-hole drilling method whereby ground at the bottom of the borehole is cut by a drill bit rotated on the bottom of a borehole, and drill fluid is pumped down to the drill bit through the hollow drill pipe. - Cable percussion drilling: an open-hole drilling method whereby ground at the bottom of the borehole is broken up by percussive action of a bailer, clay cutter or chisel, and brought to the surface by the bailer or clay cutter. - Auger drilling: an open-hole drilling method whereby ground at the bottom of the borehole is cut and brought to the surface by auger flights. - Core drilling: a rotary drilling method that cuts out cylindrical ground samples. The common drilling techniques for an offshore project are open-hole rotary drilling and core drilling. Offshore core drilling is by either piggyback or by downhole system. Piggyback core drilling uses drilling techniques whereby the drill pipe for open-hole rotary drilling acts as drill casing and as support for the drill rig. Downhole core drilling uses a core barrel that latches in a bottomhole assembly for open-hole rotary drilling. A wide range of in-situ tests is available for boreholes. Examples are the Standard Penetration Test (SPT), the pressuremeter test for onshore and nearshore boreholes and the Cone Penetration Test (CPT) for offshore boreholes. This document describes such tests as an integral part of borehole activities, but gives no test details. Separate descriptions apply, if appropriate. The common sampling techniques are drive sampling and/or push sampling of an open-tube sampler, and push sampling in case of a piston sampler. Sampling of cuttings from drilling may be feasible for some types of drilling techniques. Borehole activities are based on ISO, CEN, NEN, BSI and ASTM standards. DRILLING APPARATUS GENERAL Descriptions of common borehole drilling apparatus are as follows: - Drilling Equipment: any equipment that provides a suitably clean open hole before insertion of downhole sampling and/or testing apparatus and ensures that sampling and/or testing is performed in undisturbed ground. - Drill Rig: machine capable of providing: . rotation, feed and retraction to drill pipe, casing and/or auger, . drill fluid pumping capacity, as required, . sampler or test apparatus insertion. - Drill Casing: cylindrical pipe with one or more of the following purposes: . to support the sides of a borehole, . to support drill pipe above ground surface in case of over-water drilling, . to promote return of drilling fluid. - Drill Pipe: cylindrical pipe connecting drill rig and drill bit. - Drill Collar: thick-walled drill pipe providing self-weight thrust for the drill bit. - Drill Bit: device attached to drill pipe and used as a cutting tool to drill into the ground. - Bottom Hole Assembly: lower section of offshore drill pipe and drill bit, shaped to permit latching of downhole in-situ testing and sampling apparatus. An optional facility for rotary drilling is analogue or digital recording of MWD (Measure-While-Drilling) parameters, such as penetration rate, torque and drill fluid pressure.
Fugro 1995-2005
ISSUE 19
FEBV/CDE/APP/002
Page 1 of 9
GEOTECHNICAL BOREHOLE
CORING Core drilling is a ground investigation technique comprising simultaneous drilling and sampling. Descriptions of apparatus are as follows: - Single Tube Core Barrel: hollow steel tube with a head at the upper end threaded for drill pipe, and a threaded connection for the core bit at the lower end. - Double Tube Core Barrel: assembly of two concentric steel tubes joined at the upper end by means of a swivel arranged to permit rotation of the outer tube without causing rotation of the inner tube; the upper end of the outer tube is threaded for drill pipe and the lower end is threaded for the core bit. - Double Tube Core Barrel with Retrievable Inner Tube: double tube core barrel that permits retrieval of the core-laden inner tube assembly to the surface through matching drill pipe without the need for withdrawal of the drill pipe. - Core Bit: device attached to the core barrel and used as a cutting tool to drill into the ground. - Core Catcher: device that assists retention of core in the core barrel. - Core Box: box with longitudinal separators for the protection and storage of core. OFFSHORE OPERATIONS Offshore drilling can require additional apparatus, in particular when drilling from a vessel: - Seabed Reaction Frame: seafloor-based apparatus capable of providing one or more of the following: . improved horizontal and vertical control of the drill pipe . re-entry of a borehole by drill pipe after earlier retraction . vertical reaction for the drill pipe during downhole testing and sampling . vertical reaction for hard-tie rigging. - Heave Compensator: apparatus to compensate the drill pipe for vertical motion of a drill rig mounted on a vessel. - Hard-tie Rigging: special rigging system incorporating a seabed reaction frame and a heave compensator, for heave-compensated drilling with low drill bit load and/or increased depth control of the drill bit. SAMPLING APPARATUS DRIVE SAMPLING Drive-Weight Assembly: Device consisting of hammer, hammer fall guide, anvil and hammer drop system. Hammer: impact mass, which is successively lifted and dropped to provide the energy that accomplishes sampler penetration. Hammer Fall Guide: guide arrangement for the fall of the hammer. Anvil: drive-head which the hammer strikes and through which the hammer energy passes into the sampling rods. Hammer Drop System: pick-up and release mechanism by which lifting and dropping of the hammer is accomplished. Cathead: rotating drum in a rope-cathead hammer drop system around which a rope is wrapped to lift and drop the hammer by successively tightening and loosening the rope turns around the drum. Self-Tripping Release: hammer drop system that ensures a free fall of the hammer after lifting by a cable or rope. Free-Fall Winch: hammer drop system that permits a free release of the rotating drum of the winch around which a cable is wrapped to lift and drop the hammer. Hydraulic Percussion: hammer drop system that provides rapid impact hammer blows by fluid flow. Sampling Rods: rods that connect the drive-weight assembly to the sampler head.
PUSH SAMPLING APPARATUS Sampler Insertion Equipment: apparatus providing relatively rapid continuous penetration force. Reaction Equipment: reaction for the sampler insertion equipment. Sampling Rods: rods that connect the sampler insertion equipment to the sampler head.
Page 2 of 9
FEBV/CDE/APP/002
Fugro 1995-2005
ISSUE 19
GEOTECHNICAL BOREHOLE
SAMPLER Open-Tube Sampler: sampler with tube that is open at one end and fitted to the sampler head at the other end. Piston Sampler: sampler with close-fitting sliding piston that is held stationary during penetration of a flush sample tube into ground. Sampler Head: coupling between sampling rods and sample tube, and containing a non-return valve to allow free exit of water and air above sample. Sample Tube: cylindrical tube with cutting edge or cylindrical tube fitted with separate cutting shoe. Thin-Walled Sample Tube: sample tube with area ratio of less than 15% and inside clearance ratio of less than 1%. Thick-Walled Sample Tube: sample tube not meeting the requirements of a thin-walled sample tube. Core Catcher: device that assists retention of the sample in the sample tube.
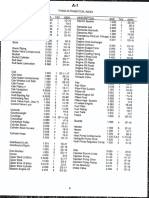
Table 1 shows dimensions of common tube samplers. TABLE 1 DIMENSIONS OF SAMPLERS
Sampler type Inside diameter D1 [mm] Piston Thin-walled 3 inch tube Thin-walled 5 - 10 tube
o o
Outside diameter D2 [mm] 76 76 76 80 57 60.3 77 51 76.1 76.1 63
Inside diameter D3 [mm] 72 72 72 72 54 53.1 58 41 63.5 67 54
Wall thickness
Area ratio Ar
Inside clearance ratio Cr [%] 0 0 0 0 0 0 3.9 2.5 4.1 3 0.7
Tube length
Sample length
[mm] 2.0 2.0 2.0 4 1.5 3.6 10.5 5 6.3 3 3.6
[%] 11 11 11 24 11 29 89 63 56 42 38
[mm] 1028 1028 1028 1028 1028 and 645 645 3222 600 600 2031 1000
[mm] 845 950 950 950 950 and 570 570 3050 600 600 1884 950
72 72 72 72 54 53 56 40 61 66 53.7
Thick-walled 3 inch tube Thin-walled 2 inch tube Thick-walled 2 inch tube Rapid piston sampler Hammer sampler 2 inch splitspoon Hammer sampler 3 inch splitspoon
ISSUE 19
Fugro CORER 67 mm tube Fugro CORER 54 mm tube
Notes 1. D1 = inside diameter of the cutting shoe = greatest outside diameter of the sample tube and/or cutting shoe 2. D2 = inside diameter diameter of the flush portion of the sample tube or liner 3. D3 4. Length dimension considers manufactured length. Re-use of a sampler may lead to shortening, for example to reshape cutting edge 5. Thin walled 5o - 10o tube is equivalent to conventional thin-walled 3 inch tube except for specially machined cutting edge with 5o and 10o taper to reduce sampling disturbance 6. Penetration of Rapid Piston Sampler is by pressurising drill string (with minimum length of 55 m) and controlled fracturing of shear pins in the sampler, giving estimated impact velocity in the order of 10 m/s 7. Machined cutting edge of Rapid Piston Sampler has taper of 10o 8. Penetration of Fugro CORER is by self-weight supplemented by mud-driven hammering 9. Machined cutting edge of Fugro CORER (54 mm) has taper of 7o 10. Fugro CORER (54 mm) also allows use of conventional 2 inch sample tubes
Fugro 1995-2005
FEBV/CDE/APP/002
Page 3 of 9
GEOTECHNICAL BOREHOLE
The definitions of area ratio and inside clearance ratio are as follows: Area Ratio: Indication of volume of ground displaced by the sample tube, calculated as follows: Ar = [(D2 -D1 )/D1 ] x 100
2 2 2
where: = area ratio expressed as percentage, Ar = greatest outside diameter of the sample tube and/or cutting shoe, D2 = inside diameter of the cutting shoe. D1 Inside Clearance Ratio: Indication of clearance of sample inside the sample tube, calculated as follows: Cr = [(D3-D1)/D1] x 100
where: = inside clearance ratio expressed as percentage, Cr = inside diameter diameter of the flush portion of the sample tube or liner, D3 = inside diameter of the cutting shoe. D1 The worst case of manufacturing tolerances applies for calculation of Cr. PROCEDURE Figure 1 summarises the procedure for boreholes. The procedure includes several stages, as follows: BOREHOLE SET-UP STAGE assignment of borehole details such as location, target borehole depth, types of apparatus, sequence of sampling, positioning of drill rig at assigned location, selection of drilling, sampling or in-situ testing stage.
The subsequent stage is one of the following: OPEN-HOLE DRILLING STAGE open-hole drilling, borehole logging, such as drill bits and drill fluids used, borehole size and depth, drilling observations, borehole water level, where practicable, selection of subsequent drilling, sampling or in-situ testing stage.
IN-SITU TESTING STAGE in-situ test, logging, such as test depth and test parameters, selection of subsequent drilling stage.
ISSUE 19
SAMPLING STAGE sampling, logging, such as sample depth and visual description of samples where available for inspection at the time of sampling, sample handling, selection of subsequent drilling stage.
Fugro 1995-2005
Page 4 of 9
FEBV/CDE/APP/002
GEOTECHNICAL BOREHOLE
Start borehole
Borehole set-up stage
Yes
First borehole of project
Yes No
Set-up approval
Stage selection
Open-hole Drilling or Core Drillling
Sampling
In-Situ Testing
No
Method Selection
Method selection
Method selection
Execution
Execution
Execution
Borehole termination ?
No
Yes
Borehole termination stage
End borehole
Figure 1 - Flow chart CORE DRILLING STAGE ISSUE 19
core drilling, operational logging, such as drill bits and drill fluids used, borehole size and depth, drilling observations, borehole water level, where practicable, core logging, such as recovery and visual description, core handling, selection of subsequent drilling, sampling or in-situ testing stage.
BOREHOLE TERMINATION STAGE termination of borehole, backfilling of borehole, if appropriate, data processing.
o
Fugro 1995-2005
Set-up requires a reasonably flat, accessible, ground surface with a slope of 5 or less. In other cases, setup is at discretion of equipment operator, considering risks such as damage to apparatus or safety of personnel. Most onshore drilling systems have levelling facilities allowing a vertical start of drilling. Seabed reaction frames used for offshore drilling activities have no levelling facilities. Drill pipe passage through a seabed reaction frame must be (near-)vertical. The sampling stage or the core drilling stage may result in no-recovery or partial recovery of a sample due to unfavourable conditions for the deployment of a particular sampler. A subsequent sampling event at the same depth or immediately below the initial sampling depth is a separate sampling activity, unless specifically agreed otherwise or unless no specific evidence shows departure from the agreed procedure for the earlier activity.
FEBV/CDE/APP/002
Page 5 of 9
GEOTECHNICAL BOREHOLE
Criteria for borehole termination are as follows, unless specifically agreed otherwise: - As instructed by Client - Reaching target penetration - Drilling progress rate of less than 1m/hour based on half-hourly observation - Circumstances at discretion of system operator, such as risk of damage to apparatus or safety of personnel whichever occurs first and as applicable. RESULTS BOREHOLE LOG The borehole log contains the geotechnical descriptions of the encountered strata, and the borehole water level measurements, if applicable. In addition, it may include the principal details of the borehole operational activities. MWD PARAMETERS Optional presentation of MWD parameters for rotary drilling is usually in graphical format. Interpretation of MWD parameters can help characterisation of ground conditions such as cemented strata, weak rock and formations with cavities. GEOTECHNICAL DESCRIPTION The geotechnical description, including the strata boundaries, is an interpretation of the processed data available at the time of the borehole log preparation. Subsequent processing and integration of supplementary ground investigation data may require adjustment of the borehole log. Supplementary information can include: - geological information, - geophysical data, - results of nearby boreholes and in-situ tests, - laboratory test results, - analysis of drilling parameters such as torque, feed, drill fluid pressure and drilling time. Level of detail and accuracy in geotechnical description depend on factors such as sample size, quality, coverage of samples and test data, availability of supplementary information, and project requirements. For example, geotechnical descriptions prepared for the purpose of a pile foundation may differ from those prepared for a pipeline. Any graphical presentation of test results considers values within the scale limits only. No automatic scaling applies, unless indicated otherwise. WATER LEVEL Water level measurements taken in boreholes can be valuable. Interpretation of water levels requires due caution. They may or may not be representative of the ground water levels. In any case, water levels apply to the time and date of the measurements only. They will vary due to seasonal and other environmental influences, including construction activities. SAMPLE QUALITY Additional documentation of borehole operational activities can include further details on drilling, sampling and in-situ testing. In particular, details of sampling techniques and samplers can be important for the evaluation of the results of laboratory tests. An example is the open-tube sampler fitted with a thin-walled sample tube of 50 mm to 100 mm diameter. The sample quality (BSI, 1999; NEN, 1991) is typically undisturbed, Class 2, for very soft fine-grained soil and Class 1 for firm to very stiff fine-grained soil. The sample quality for coarse-grained soils is typically
ISSUE 19
Page 6 of 9
FEBV/CDE/APP/002
Fugro 1995-2005
GEOTECHNICAL BOREHOLE
disturbed, Class 3. For a thick-walled sample tube, the sample quality for fine-grained soil is typically one class worse than for a thin-walled tube. A piston sampler with a thin-walled sample tube allows Class 1 sample quality for very soft fine-grained soil. The classification system for sample quality recognises 5 classes on the basis of feasibility of specific geotechnical identification and laboratory tests. A summary of these classes is as follows: Class 1: undisturbed: strength, stiffness and consolidation Class 2: undisturbed: layering, permeability, unit weight Class 3: disturbed: water content Class 4: disturbed: particle size analysis, Atterberg limits, soil type Class 5: disturbed: stratigraphy The higher class includes the laboratory tests of the lower classes. Comments on Class 1 and Class 2 fine-grained soil samples are as follows: - Some sample disturbance is inevitable because of the required sampling process and subsequent onsite and laboratory sample handling. - Silt soil is more sensitive to disturbance than clay soil. - Sample disturbance typically increases with increasing total stress conditions applicable to the in-situ soil. Negative pore pressures develop after sampling, upon reduction of total stresses. The resulting effective stresses within the sample cause sample disturbance. Sample disturbance may thus increase with sampling depth or with increasing water depth for offshore boreholes. - Reduction in water pressure occurring after sampling causes a change in equilibrium between dissolved gasses, gas bubbles and gas hydrates, where present. The amount of gas release increases with water pressure. This may result in increased sample disturbance, in particular for deep-water sites. Brown (1981) and ASTM International (2002) provide descriptions for rock core quality as follows: TCR Total Core Recovery: the total core length divided by the core run length SCR Solid Core Recovery: the total length of the pieces of solid core that have a complete circumference divided by the core run length RQD Rock Quality Designation: the total length of the pieces of sound core over 100 mm long along the centreline divided by the core run lengths per stratum or core run; sound core includes core with obvious drilling breaks Fracture Index: spacing of natural discontinuities. IF Sample quality may change with time and storage conditions. The type of soil or rock will influence the degree of change. For example, exposure to air may initiate chemical processes, such as rapid oxidisation of organic soil. SYMBOLS
ISSUE 19
The borehole log contains a graphic log of the ground conditions. Figures 2 through 4 present details for soils, cementation degrees and rocks. In addition, the borehole log may show specific symbols for sampling and in-situ testing. Figure 5 presents details.
Fugro 1995-2005
FEBV/CDE/APP/002
Page 7 of 9
GEOTECHNICAL BOREHOLE
MAIN SOIL TYPE PEAT
CEMENTATION Slightly Cemented Moderately Cemented Well Cemented
ADDITIONAL SOIL PARTICLES
EXAMPLES OF GRAPHIC LOG
Organic Matter Shells or Shell Fragments Coral Fragments
PEAT, clayey
...
CLAY
CLAY, sandy
.....
SILT
CLAY, very sandy
......... ......... SAND
GRAVEL
...
Algal Crustations
SILT, sandy
Gypsum Crystals
Coralline DEBRIS
Rock Fragments
DEBRIS
. . Inclusions
Interbedded Thin Layer/Seam
... ....... .... . ... .. ... ....... ....
SAND, clayey
SAND, very gravelly, clayey
SAND, silty, well cemented
Shell DEBRIS
GRAVEL, sandy
MADE GROUND
Figure 2 - Symbols for soils
CARBONATE ROCKS CALCARENITE SILICA ROCKS EVAPORITES GYPSUM / ANHYDRITE
.... . . . . SANDSTONE .... ....
SILTSTONE
CALCISILTITE
ROCK SALT
CALCILUTITE
CLAYSTONE
Carbonate CONGLOMERATE
CONGLOMERATE
Carbonate BRECCIA
BRECCIA
LIMESTONE
MUDSTONE
C C C
C C
CHALK
Figure 3 - Symbols for sedimentary rocks
Fugro 1995-2005
METAMORPHIC ROCKS Fine grained rock
IGNEOUS ROCKS Fine grained rock
Medium grained rock
Medium grained rock
Coarse grained rock
Coarse grained rock
Figure 4 - Symbols for metamorphic and igneous rocks
Page 8 of 9
FEBV/CDE/APP/002
ISSUE 19
Dolomitic LIMESTONE
SHALE
GEOTECHNICAL BOREHOLE
Sample Core Run
1 A Ambient Pressure Sample 2 H Hammer Sample 3 P Piston Sample 4 W Wip Sample 5 CR Core Run
Cone Penetration Test In-Situ Test
Figure 5 - Symbols for identification of samples and in-situ tests REFERENCES ASTM International (1995), Standard Practices for Preserving and Transporting Soil Samples", ASTM D 4220-95 (Re-approved 2000), ASTM Standards on Disc Volume 04.08: Soil and Rock (I): D 420 - D 5611. ASTM International (1999), "Standard Test Method for Penetration Test and Split-barrel Sampling of Soils", ASTM D 1586-99, ASTM Standards on Disc Volume 04.08: Soil and Rock (I): D 420 - D 5611. ASTM International (1999), Standard Practice for Rock Core Drilling and Sampling for Site Investigation", ASTM D 2113-99, ASTM Standards on Disc Volume 04.08: Soil and Rock (I): D 420 - D 5611. ASTM International (2000), Standard Practice for Thin-walled Tube Sampling of Soils for Geotechnical Purposes", ASTM D 1587-00, ASTM Standards on Disc Volume 04.08: Soil and Rock (I): D 420 - D 5611. ASTM International (2002), Standard Practices for Preserving and Transporting Rock Core Samples", ASTM D 5079-02, ASTM Standards on Disc Volume 04.08: Soil and Rock (I): D 420 - D 5611. ASTM International (2002), Standard Test Method for Determining Rock Quality Designation (RQD) of Rock Core, ASTM D 6032-02, ASTM Standards on Disc Volume 04.09: Soil and Rock (II): D 5714 Latest. ASTM International (2003), Standard Practices for Handling, Storing and Preparing Soft Undisturbed Marine Soil", ASTM D 3213-03, ASTM Standards on Disc Volume 04.08: Soil and Rock (I): D 420 - D 5611. ASTM International (2003), Standard Guide for Field Logging of Subsurface Explorations of Soil and Rock", ASTM D 5434-03, ASTM Standards on Disc Volume 04.08: Soil and Rock (I): D 420 - D 5611. Brown, E.T. (Ed.) (1981), Rock Characterization Testing & Monitoring: ISRM Suggested Methods, Pergamon Press, Oxford. BSI British Standards Institution (1999), "Code of Practice for Site Investigations", British Standard BS 5930:1999. CEN European Committee for Standardization (2004), Eurocode 7: Geotechnical Design - Part 2: Ground Investigation and Testing, European Prestandard prEN 1997-2:2004. ISO International Organization for Standardization (2005), Geotechnical Investigation and Testing Sampling Methods and Groundwater Measurements Part 1: Technical Principles for Execution, ISO/FDIS 22475-1:2005. NEN Nederlands Normalisatie-instituut (1991), Geotechnics. Drilling and Sampling in Soil, Dutch Standard NEN 5119. (in Dutch).
Fugro 1995-2005
ISSUE 19
FEBV/CDE/APP/002
Page 9 of 9
RECOVERY OF DOWNHOLE TOOLS PROCEDURE
1.0 1.1
PURPOSE The purpose of this work practice is to define the actions to be taken by the drilling crew and the in-situ testing and sampling crew to recover downhole equipment that is temporarily lost in the hole.
2.0 2.1
SCOPE This work practice covers the drillfloor operations required for the recovery of downhole in situ testing or sampling equipment on the vessel including equipment, methods and personnel.
3.0 3.1 3.2
REFERENCES Fugro Equipment Manuals Equipment Data Sheets
4.0 4.1 4.2 4.3 4.4 4.5
DEFINITIONS & ABBREVIATIONS FSIN FEBV Wison PCPT SEACLAM BHA Fugro Singapore Pte Ltd Fugro Engineers BV Wireline Downhole in-situ probing device Seabed frame for clamping casing/drillpipe Bottom Hole Assembly
5.0 5.1
RESPONSIBILITIES The Vessel Chief Engineer is responsible for ensuring that all vessels drilling equipment is operational. The Vessel Master has overall control and responsibility for all drillfloor operations. The FEBV Operator is responsible for the all FEBV equipment, including the Seaclam operations and downhole tools.
5.2 5.3
DOC REV / DATE
: FSEAG-HP-6 RDT-RecoveryDownholeTools.doc : 0 / SEP-02
PAGE
1 OF 2
RECOVERY OF DOWNHOLE TOOLS PROCEDURE
6.0 6.1
PROCEDURES Procedure for recovery of downhole equipment 1. If the Wison CPT tool is stuck in the BHA or drill bit the Wison operator will apply sufficient tension on the umbilical to shear the safety pins on the tool head. Retrieve the umbilical from the drill string. Prepare the overshot tool. Connect overshot tool to free-fall winch. Pick up the overshot with the free-fall winch and position over the drill string Lower the overshot with the free-fall down the drill string until the overshot latches into the CPT tool. Once the overshot is latched satisfactorily recover the overshot and CPT tool with the free-fall winch. If the CPT tool remains stuck in the BHA or drill bit after applying tension on the free-fall winch it will be necessary to cut the free-fall winch wire rope. After cutting of the wire rope recover the lost downhole tool by pulling the drill string. With the BHA on the deck after pulling the drill string remove the stuck tool from the BHA.
2. 3. 4. 5. 6. 7. 8. 9. 10.
Note: Maximum pull on the free-fall winch is 800kg. The Safe Working Load on the winch should not be exceeded by use of other procedures than outlined in 6.1.
7.0 7.1
SAFETY Overall Supervision of the drill floor shall be under the direct supervision of the Vessels Master and in his absence the Driller on shift. All non-essential personnel shall obtain permission from the Driller on shift before crossing or performing any operations on the drillfloor. All operations shall be carried out by experienced personnel. A job hazard analysis shall be made prior to all operations and all personnel involved shall read and if necessary implement additional safety measures as required.
7.2
7.3 7.4
DOC REV / DATE
: FSEAG-HP-6 RDT-RecoveryDownholeTools.doc : 0 / SEP-02
PAGE
2 OF 2
CONE PENETRATION TEST
INTRODUCTION The Cone Penetration Test (CPT) is in wide use for in-situ geotechnical characterisation of ground. It involves the measurement of the resistance of ground to steady and continuous penetration of a cone penetrometer equipped with internal sensors. The measurements comprise penetration depth, cone resistance, sleeve friction and, optionally, pore pressure and inclination from vertical. These measurements permit interpretation of ground conditions. CPT apparatus and procedures adopted by Fugro are in general accordance with the International Reference Test Procedure published by the International Society of Soil Mechanics and Geotechnical Engineering (ISSMGE, 1999). BS 5930 (BSI, 1999) refers to ISSMGE (1999). Eurocode 7 (CEN, 1999) and NORSOK Standard G-CR-001 (NTS, 1996) refer to an earlier version of the ISSMGE document. General agreement also applies to standards published by ASTM International (ASTM D5778-95) and Nederlands Normalisatie-Instituut (NEN 5140). CPT APPARATUS GENERAL CPT apparatus includes various parts as described below: Thrust machine: apparatus providing thrust to the push rods so that the required constant rate of penetration is controlled. Reaction equipment: reaction for the thrust machine. Push rod: thick-walled cylindrical tube used for advancing the penetrometer to the required test depth. Friction-cone penetrometer (CPT): cylindrical terminal body mounted on the lower end of the push rods, including a cone, a friction sleeve and internal sensing devices for the measurement of cone resistance, sleeve friction and, optionally, inclination. Piezo-cone penetrometer (CPTU or PCPT): cylindrical terminal body mounted on the lower end of the push rods, including a cone, a friction sleeve, a filter and internal sensing devices for the measurement of cone resistance, sleeve friction, pressure and, optionally, inclination. Measuring system: apparatus and software, including sensors, data transmission apparatus, recording apparatus and data processing apparatus. DEPLOYMENT FROM GROUND SURFACE OR SEAFLOOR Specific additional apparatus for CPT deployment from ground surface and seafloor can include: Push rod casing: guide for the part of the push rods protruding above the soil, and for the push rod length exposed in water or soil, in order to prevent buckling when the required penetration pressure increases beyond the safe limit for the exposed upstanding length of push rods. Friction reducer: ring or special projections fixed on the outside of the push rods, with an outside diameter larger than the base of the cone, to reduce soil friction acting on the push rods.
ISSUE 19
DOWNHOLE DEPLOYMENT Downhole CPT systems latch into the lower end of a drill pipe. Fugro employs two types of downhole systems: 1. Operation of the thrust machine by applying mud pressure in the borehole, together with downhole recording of data. 2. Remote control of the thrust machine by hydraulic pressure transmitted through an umbilical cable connected to a surface-based pump unit, together with surface-based recording of data. Downhole CPTs require drilling apparatus for advancing the borehole and a bottom hole assembly that permits latching of the thrust machine. The maximum stroke of the thrust machine is generally 1.5 m or 3 m.
Fugro 1995-2005
FEBV/CDE/APP/001
Page 1 of 9
CONE PENETRATION TEST
CONE PENETROMETER Typical features of Fugro penetrometers (Figure 1) include: 2 2 cone base areas of either 1000 mm or 1500 mm ; other sizes are also in use, including penetrometers 2 2 with cross-sectional areas of 500 mm and 3300 mm , cone and friction sleeve sensors placed in series, (pore) pressure measurements either at the face of the cone (u1) or at the cylindrical extension of the cone (u2). However, multiple-sensor penetrometers (u1, u2 and u3) are also available. The u3 location is immediately above the friction sleeve, non-directional inclinometer, storage of signals from the penetrometer in digital form for subsequent computer-based processing and presentation. It is noted that load sensors placed in series offer robustness within the limitations of the relatively small 2 diameter of penetrometers (36 mm diameter for 1000 mm cone base area). Robustness can offer improved performance in soft ground in comparison to more sensitive systems (Zuidberg, 1988). PROCEDURE Figure 2 summarises the test procedure. The procedure includes several stages. The stage of Additional Measurements is optional.
POSITION
PART
Start
Set-up stage
Shaft
First CPT of project
Yes
No
Push rod connector Gap between friction sleeve and shaft
Set-up approval
Soil seal Electrical cable for signal transmission Water seal
PENETROMETER TIP
CPT
Friction sleeve Friction sleeve Friction sleeve sensor
Additional measurements ?
No
Yes
No
Amplifier unit
Additional measurements
Cone sensor
Inclinometer
Termination
Gap between friction sleeve and cone Cylindrical extension above base of cone Base of cone Face of cone Water seal Pressure sensor Soil seal Filter
Yes
Termination stage
Cone
Apex of cone
End
Figure 1 Piezo-cone Penetrometer
Figure 2 - Flow chart
o
Set-up requires a reasonably flat, accessible, ground surface with a slope of 5 or less. In other cases, setup is at discretion of equipment operator, considering risks such as damage to apparatus or safety of personnel. Most onshore thrust machines have levelling facilities allowing a vertical start of penetration. Seabed frames used for offshore CPT activities have no levelling facilities, i.e. start of penetration may not be vertical.
Page 2 of 9
FEBV/CDE/APP/001
Fugro 1995-2005
ISSUE 19
CONE PENETRATION TEST
The set-up stage includes selection of equipment and procedures according to project-specific agreements, such as the required Accuracy Class, penetration, type of cone penetrometer and data processing/ submission. Table 1 presents the ISSMGE accuracy classes. TABLE 1 ACCURACY CLASSES (ISSMGE, 1999) Measured Parameter Allowable Minimum Accuracy Cone resistance, qc Sleeve friction, fs Pore pressure, u Inclination, I Penetration depth, z Cone resistance, qc Sleeve friction, fs Pore pressure, u Inclination, I Penetration depth, z Cone resistance, qc Sleeve friction, fs Pore pressure, u Inclination, I Penetration depth, z Cone resistance, qc Sleeve friction, fs Penetration depth, z 50 kPa or 3% 10 kPa or 10% 5 kPa or 2% 2 0.1 m or 1% 200 kPa or 3% 25 kPa or 15% 25 kPa or 3% 2 0.2 m or 2% 400 kPa or 5% 50 kPa or 15% 50 kPa or 5% 5 0.2 m or 2% 500 kPa or 5% 50 kPa or 20% 0.1 m or 1%
Test Class 1
Note:
The allowable minimum accuracy of the measured parameter is the larger value of the two quoted. The relative or % accuracy applies to the measurement rather than the measuring range or capacity.
The set-up stage or the termination stage includes the location survey, i.e. the determination of the coordinates and the ground surface elevation (or the water depth). The set-up stage and the termination stage for a downhole CPT include lowering of the CPT apparatus into the borehole and lifting respectively. Most projects require multiple tests in a single borehole. For piezo-cone testing, the set-up stage also includes the following steps: Office-based or site-based: de-airing of the filter in glycerine by application of 24-hour vacuum and storage in a glycerine-filled container; On-site: glycerine filling of hollow space in the cone penetrometer and subsequent mounting of the filter; On-site: application of a flexible membrane around the filter to prevent loss of saturating fluid prior to the start of a test. Land-based tests may include specific measures to help retention of filter saturation during penetration of partially saturated zones. Relaxation of requirements may apply to offshore tests where water pressures will force entrapped air into solution. Criteria for test termination are as follows, unless specifically agreed otherwise: as instructed by Client, reaching target penetration, reaching maximum capacity of the thrust machine, reaction equipment, push rods and/or measuring sensors, o penetrometer inclination of greater than 15 , sudden increase in penetrometer inclination, circumstances at discretion of equipment operator, such as risk of damage to apparatus or safety of personnel, whichever occurs first and as applicable.
Fugro 1995-2005
ISSUE 19
FEBV/CDE/APP/001
Page 3 of 9
CONE PENETRATION TEST
A CPTU pore pressure measuring system is intended for use in water-saturated uncemented fine-grained soil. Results obtained for ground conditions such as partially saturated soils, very dense sands and cemented soils may not be reliable and/or repeatable. For example, stiffness differences between the steel components of the cone penetrometer and the piezo-cone filter can affect results for very dense sands. Also, loss of saturation of the pore pressure measuring system may occur during a test (Lunne et al., 1997). Reasons can include: penetration of partially saturated ground, for example ground containing significant amounts of gas; measurement of negative pore pressures such that cavitation occurs. For example, this is not uncommon for a piezo-cone filter located at the cylindrical extension above the base of the cone (u2 location). Particularly, this may occur at the time of penetration of dense sand or overconsolidated clay layers. Loss of saturation usually causes a sluggish pore pressure response during penetration of ground below the zone causing desaturation of the pore pressure measuring system. Special apparatus and procedures may apply to: specific additional measurements (for example shear wave velocity), specific applications (for example deep-water tests or measurements for Accuracy Classes 1 and 2). RESULTS CPT PARAMETERS Presentation of results from cone penetration tests includes: CPT parameters qc, fs and Rf versus depth below ground surface or versus elevation, additional CPTU parameters u1 or u2 and, optionally, qt, qn and Bq for tests with pore pressure measurements, optionally, inclination i for tests with inclination measurements, standard graphical format and optional ASCII format. This reference level of a test is (1) the ground surface for onshore tests, (2) the seafloor for nearshore and offshore tests in seabed mode, or (3) the bottom of the borehole for downhole tests. Data processing according to (3) presumes a hydrostatic pore pressure profile relative to seafloor, unless specifically indicated otherwise. The definition of CPT parameters is as follows: z = penetration depth relative to ground surface or seafloor, corrected for inclination from vertical (i) where a test includes inclination measurements, as follows: z =
cos i . dl
0
qc fs Rf u1 u2 qt
= cone resistance relative to the reference level of the test. = sleeve friction relative to the reference level of the test. A calculated depth correction applies so that the presented sleeve friction corresponds with the cone depth. = ratio of sleeve friction to cone resistance (fs/qc). This calculated ratio is for the cone depth. = pore pressure at the face of the cone, relative to the reference level of the test. = pore pressure at the cylindrical extension above the base of the cone, relative to the reference level of the test. = corrected cone resistance (also called total cone resistance). This includes corrections for hydrostatic and transient pore pressures, and cone construction. The corrected cone resistance is relative to ground surface or seafloor:
Page 4 of 9
FEBV/CDE/APP/001
Fugro 1995-2005
ISSUE 19
where: z = penetration depth l = recorded penetration length i = recorded inclination from vertical
CONE PENETRATION TEST
ground surface mode / seabed mode: qt = qc+(1-a)u2 or qt = qc+(1-a){K(u1-uo)+uo} where: a
Downhole mode: qt = qc+(1-a)u2+uoi or qt = qc+(1-a){K(u1+uoi-uo)+uo}+auoi
= net area ratio of the cross-sectional steel area at the gap between cone and friction sleeve to the cone base area. This ratio is penetrometer-type dependent. The a-factor indicates the effect of pore pressure on unequal cross-sectional areas of the cone. hydrostatic pore pressure at the cone, relative to the phreatic surface or the seafloor. This is a calculated value. Calculation takes no account of any non-hydrostatic pore pressure conditions, unless specifically indicated otherwise. hydrostatic pore pressure at the bottom of the borehole, relative to seafloor. This is a calculated value. Calculation takes no account of any non-hydrostatic pore pressure conditions, unless specifically indicated otherwise. = adjustment factor for the ratio of pore pressure at the cylindrical extension above the base of the cone to pore pressure on the cone face. Ground surface mode / seabed mode: K = (u2-uo)/(u1-uo) Downhole mode: K = (u2+uoi-uo)/(u1+uoi-uo)
uo =
uoi =
The term u2-uo or u2+uoi-uo refers to excess pore pressure (with respect to hydrostatic pore pressure). Common symbols for excess pore pressure are du2 or u2. Similarly, du1 or u1 may represent the term u1-uo or u1+uoi-uo. The K-factor is only of interest for processing of CPTU results with pore pressure measurement at the cone face (u1). The factor depends on soil characteristics as fabric, overconsolidation ratio, compressibility and crushability. Table 2 shows common values (Lunne et al., 1997): TABLE 2 ADJUSTMENT FACTOR K Soil Behaviour Type K 0.6 to 0.8 Normally consolidated clay 0.5 to 0.7 Slightly overconsolidated, sensitive clay 0 to 0.3 Heavily overconsolidated, stiff clay 0.5 to 0.6 Loose, compressible silt 0 to 0.2 Dense, dilative silt 0.2 to 0.4 Loose, silty sand
ISSUE 19
u1/u0 2 to 3 6 to 9 10 to 12 3 to 5 3 to 5 2 to 3
qn =
qt-vo = net cone resistance. This includes corrections for hydrostatic and transient pore pressures, in-situ stress, and cone construction. The symbol for qn may also be qnet. where: vo = total in-situ vertical stress at the cone base, relative to ground surface or seafloor. This is a calculated value.
Fugro 1995-2005
Bq =
pore pressure ratio: ground surface mode / seabed mode: Bq = K(u1-uo)/qn or Bq = (u2-uo)/qn downhole mode: Bq = K(u1+uoi-uo)/qn or Bq = (u2+uoi-uo)/qn
Some deployment systems allow monitoring of CPT parameters in reverse mode, i.e. upon retraction of the cone penetrometer. This optional feature presents additional information that can improve interpretation of ground behaviour, for example strength sensitivity of fine-grained soil.
FEBV/CDE/APP/001
Page 5 of 9
CONE PENETRATION TEST
ACCURACY OF MEASUREMENTS Accuracy Classes Traditionally, cone penetration test standards followed a prescriptive approach, whereby specific detailed measures provided a deemed to comply practice. Current practice (NNI, 1996 and ISSMGE, 1999) specifies performance criteria for cone penetration test measurements. The ISO standard on metrological confirmation (ISO, 1992) provides the general framework for assessment of performance compliance. The following comments apply: Accuracy is the closeness of a measurement to the true value of the quantity being measured. It is the accuracy as a whole that is ultimately important not the individual parts. Precision is the closeness of each set of measurements to each other. The resolution of a measuring system is the minimum size of the change in the value of a quantity that it can detect. It will influence the accuracy and precision of a measurement. Accuracy Class 3 represents industry practice for common adverse field conditions. It is approximately equivalent to the more implicit requirements of ASTM International. Class 3 applies, unless specifically agreed otherwise. Accuracy Class 1 is a future target, currently believed to be feasible only for favourable test conditions (Lunne, 1999). Class 2 is usually feasible on a project-specific basis. So-called zero drift of the measured parameters is a performance indicator for the measuring system. Zero drift is the absolute difference of the zero readings or reference readings of a measuring system between the start and completion of the cone penetration test. The zero drift of the measured parameters should be within the allowable minimum accuracy according to the selected accuracy class. Correction of measured parameters for zero drift applies if appropriate for meeting the requirements of the selected accuracy class. Accuracy considerations for strongly layered soils must allow for heat flux phenomena. Heat flux is reported to give an apparent shift in cone resistance (Post and Nebbeling, 1995). For example, friction in dense o sand causes a cone to heat by about 1 C/MPa cone resistance. Resulting heat flux decreases cone resistance by an apparent shift in the order of 100 kPa to 200 kPa for a penetrating probe going from dense sand into clay. This is a temporary decrease lasting about 5 minutes. Ambient temperature compensation systems fail to avoid heat flux effects. Penetration interruption can be an effective mitigation measure. The following sections provide important information for use of results. Shallow Penetration Use of reaction equipment will affect stress conditions for shallow penetration. Particularly, offshore conditions may include extremely soft ground at seafloor. Soil disturbance, pore pressure build-up and consolidation of near-surface soft soil may take place. This will affect the measurements. Downhole deployment implies a typical limiting CPT stroke of 1.5 m or 3 m. It is common to perform multiple semi-continuous tests. Graphics for such tests typically show a build-up of CPT values for the initial 0.1 m to 0.5 m penetration. This penetration zone is immediately below the required borehole and represents complex ground stress conditions and/or borehole-induced ground disturbance that cannot be avoided. Penetration Interruption A penetration interruption may be unavoidable, for example to add a push rod or to perform a pore pressure dissipation test. This will affect test results. Consolidation of low-permeability soil around a cone tip is of particular interest. A stationary cone penetrometer can apply local stresses that approach failure conditions, i.e. about 9 times the undrained shear strength or about 2 times the in-situ mean effective stress. Pore pressure re-distribution and dissipation occur, resulting in a local increase in undrained shear strength and hence cone (bearing) resistance. A doubling of cone resistance may not be unreasonable for 100% consolidation. Supplementary considerations include:
ISSUE 19 Fugro 1995-2005
Page 6 of 9
FEBV/CDE/APP/001
CONE PENETRATION TEST
Small downward movement of a penetrometer (order of millimetres) during a test can contribute to maintaining local stresses approaching failure conditions. Soil consolidation around a cone penetrometer may lead to soil/penetrometer adhesion that is sufficient to give an increase in cone diameter. Resumption of penetration will lead to loss of adhered soil, usually within an equivalent distance of a few times the cone diameter. A low Bq value may imply partially drained penetration conditions. It is likely that any steady-state penetration conditions will not apply instantaneously upon resumption of penetration. Measuring sensors in a probe generate heat, but this is probably not significant for any stationary measurement. Fugros strain-gauge load sensors are compensated for ambient temperature fluctuations.
Depth Measurement for Offshore Conditions Offshore definition of the seafloor (ground surface) is difficult for extremely soft ground at seafloor. Penetration of the reaction equipment into a near-fluid zone of the seabed may take place unnoticed. Such settlement affects the start of penetration depth z. Also, settlement may continue at the time of testing. Downhole CPT systems rely on depth control applicable to borehole drilling. Depth control in the order of 0.2 m is feasible for drilling systems deployed from a fixed platform, for example a jack-up platform. This value excludes uncertainty associated with determination of seafloor level. Drilling control from floating equipment, for example a geotechnical survey vessel, may be subject to the additional influence of waves and tides. Depth control in the order of 0.2 m is feasible for favourable conditions, but may increase to about 0.5 m for adverse conditions. The accuracy classes include requirements for depth measurement. It is clear that these requirements may not be feasible for offshore activities. The selected approach for offshore conditions is retain only the requirements for the principal CPT parameters such as cone resistance qc. Zero-Correction for Offshore Conditions Water pressures generate significant values of cone resistance and pore pressure. The standardised practice is to correct these Reference Readings to zero at seafloor. Seabed-based CPT systems allow zero-correction to hydrostatic conditions prior to the start of a test, typically with a zero-correction uncertainty approaching the resolution of the CPT system. Downhole CPT systems latch into the lower end of a drill pipe. The pressure conditions in the drill pipe may not be in full equilibrium with the surrounding ground water pressure and zero-correction will be subject to increased uncertainty. Comparison of seabedbased and downhole based test results suggests a typical downhole zero-correction uncertainty for pore pressure in the order of 100 kPa for deepwater tests (Peuchen, 2000). This uncertainty depends on factors such as the free-flow and viscosity of drill fluid between the drill bit and the seafloor. The uncertainty typically decreases with decreasing depth of the drill bit below sea level and below seafloor. Uncertainty for the zero-correction of cone resistance is approximately equivalent, but by a factor representing the net area ratio effect.
ISSUE 19
Deepwater Tests A deepwater environment presents some favourable conditions for cone penetration tests, notably temperature. Ambient temperature conditions are practically constant and the measuring system has ample time to adjust to these temperatures (ASTM International, 1995; NNI, 1996). In addition, transient heat flow phenomena (Post and Nebbeling, 1995) in a cone penetrometer are usually not applicable due to the generally very soft soil consistency and the absence of crust layers formed by desiccation of clay or silt in geological history. Deepwater (piezo-cone) pore pressure measurements are essentially similar to shallow-water measurements, with the exception of an increased measuring range for pore pressure leading to some reduction in sensor accuracy. Saturation of a pore pressure measuring system is excellent for a deepwater environment, as the high pressures will force any gas bubbles into solution. Currently available evidence indicates that a high-quality subtraction-type cone penetrometer is adequate for very soft soil characterisation to a water depth of 3000 metres and probably beyond.
Fugro 1995-2005
FEBV/CDE/APP/001
Page 7 of 9
CONE PENETRATION TEST
Class 1 results in very soft soil are likely to be feasible for deepwater seabed-based systems. Deepwater downhole systems will probably give Class 2 results. ADDITIONAL MEASUREMENTS Friction-cone and piezo-cone penetrometers allow specific additional measurements, such as friction setup tests, pore pressure dissipation tests and measurements of ground water pressure. These additional measurements require a penetration interruption or may be feasible at the end of a test. It is also common to add other in-situ test devices to a cone penetrometer. Table 3 presents the more common types. TABLE 3 PROBES FOR ADDITIONAL IN-SITU TESTS TYPE OF PROBE PROPERTIES Electrical conductivity, K Electrical Conductivity Penetrometer (ECPT) Temperature, T Temperature Cone Penetrometer (TCPT) Shear wave velocity, vs Seismic Cone Penetrometer (SCPT) Cone Pressuremeter (CPMT) Shear stress-strain-time response, , , t Natural Gamma Penetrometer (GCPT) Natural gamma ray, Cone Magnetometer (CMMT) Magnetic flux density B, magnetic field horizontal angle and vertical angle
S m s = = = Siemens metre second Pa CPS T = = = Pascal counts per second Tesla
UNITS S/m C m/s MPa, -, s CPS T, ,
REFERENCES ASTM International (1995), "Standard Test Method for Performing Electronic Friction Cone and Piezo-cone Penetration Testing of Soil", ASTM D5778-95, Vol. 04.08, Soil and Rock (I). BSI British Standards Institution (1999), "Code of Practice for Site Investigations", BS 5930:1999. CEN European Committee for Standardization (1999), Eurocode 7: Geotechnical Design Part 3: Design Assisted by Field Testing, European Prestandard ENV 1997-3. ISSMGE International Society of Soil Mechanics and Geotechnical Engineering (1999), International Reference Test Procedure for the Cone Penetration Test (CPT) and the Cone Penetration Test with Pore Pressure (CPTU), Report of the ISSMGE Technical Committee 16 on Ground Property Characterisation from In-Situ Testing, Proceedings of the Twelfth European Conference on Soil Mechanics and Geotechnical Engineering, Amsterdam, Edited by Barends et al., Vol. 3, pp. 2195-2222. ISO International Organisation for Standardization (1992), Quality Assurance Requirements for Measuring Equipment Part 1: Metrological Confirmation System for Measuring Equipment, ISO 100112-1:1992(E). Lunne, T., Robertson, P.K., Powell, J.J.M. (1997), Cone Penetration Testing in Geotechnical Practice, Blackie Academic and Professional, London. Lunne, T. (1999), Special Workshop Investigation Methods, Proceedings of the Twelfth European Conference on Soil Mechanics and Geotechnical Engineering, Amsterdam, Edited by Barends et al., Additional Volume, pp. 51-52. NNI Nederlands Normalisatie-Instituut (1996), "Geotechnics, Determination of the Cone Resistance and Sleeve Friction of Soil, Electric Cone Penetration Tests", NEN 5140. NTS Norwegian Technology Standards Institution (1996), Common Requirements Marine Soil Investigations, NORSOK Standard G-CR-001 Rev. 1. Peuchen, J. (2000), Deepwater Cone Penetration Tests, OTC 12094, Offshore Technology Conference, Houston, Texas, May.
ISSUE 19 Fugro 1995-2005
Page 8 of 9
FEBV/CDE/APP/001
CONE PENETRATION TEST
Post, M.L. and Nebbeling, H. (1995), Uncertainties in Cone Penetration Testing, Proc. International Symposium on Cone Penetration Testing CPT95, Linkping, Sweden, Vol. 2, pp. 73-78. Zuidberg, H. (1988) "Piezocone Penetration Testing, Probe Development", ISOPT-1, Speciality Session No. 13, March 24, Orlando, Florida.
Fugro 1995-2005
ISSUE 19
FEBV/CDE/APP/001
Page 9 of 9
METROLOGICAL CONFIRMATION SYSTEM FOR IN-SITU TEST
INTRODUCTION This document presents a summary of metrological confirmation systems adopted by Fugro for electric insitu test measuring equipment for geotechnical projects. A confirmation system demonstrates compliance with specified requirements, by documentation of the management, confirmation and use of the measuring equipment. This includes calibration to a reference standard. The international standard ISO 10012-1 is the basis for the Fugro confirmation systems. Fugro performs a wide range of geotechnical in-situ tests with electrical measuring equipment, including the pressuremeter test (PMT), in-situ vane test (VST), T-bar test (TBT), hydraulic fracturing test, electrical conductivity test and in-situ temperature test. The Cone Penetration Test (CPT) is the most common in-situ test. This document primarily illustrates the confirmation system for CPT measuring equipment incorporating the piezo-cone penetrometer (CPTU or PCPT). The principles apply also to in-situ test measuring equipment incorporating other types of probes, but details may vary. MEASURING EQUIPMENT Measuring equipment includes the measuring instruments, the data acquisition system, and the software and instructions that are necessary to carry out a measurement. Examples of measuring instruments for in-situ tests are the vane blade and torque sensor for the VST and the pressuremeter module for the PMT. The measuring instruments for the CPT are the cone penetrometer and the penetration sensor. Figure 1 presents a diagram of CPT measuring equipment.
Push Rods Data Acquisition System Penetration Sensor
Thrust Machine
ISSUE 05
Reaction Equipment
Fugro 1994-2000
Cone Penetrometer
Figure 1, CPT Measuring Equipment
FEBV/GEN/APP/001
Page 1 of 3
METROLOGICAL CONFIRMATION SYSTEM FOR IN-SITU TEST
MEASURANDS A measurand is the quantity to be measured. In most cases, this is not equivalent to inferred value. For example, the principal measurand for a vane test is torque required for rotation of the vane blade. The inferred value is undrained shear strength. Determination of the undrained shear strength from torque measurement requires a model for failure zone geometry and assumptions about soil behaviour during the test. The principles for the cone penetration test are similar, but more complex. For example, one of the measurands is cone resistance. This is a quantity calculated from (1) axial force measurement, (2) allowance for internal friction of penetrometer components and (3) geometry. The important piezo-cone measurands are: Cone resistance, qc Sleeve friction, fs Pore pressure, u Inclination, i Penetration depth, z Penetration rate Data logging frequency. APPROACH TO CONFIRMATION CONFIRMATION METHODS The approach to confirmation of measuring equipment is generally as follows: (1) periodic laboratory calibration of the in-situ test probe by Methods 3 and 4 of ISO 10012-1. (2) in-service testing of the penetration (depth) sensor by Method 5 of ISO 10012-1. (3) in-service testing of the data acquisition system by Method 5 of ISO 10012-1. (4) surveillance and control of the measurement process. Method 3 assigns confirmation (calibration) intervals by calendar time. "In-use" time is the basis for Method 4 confirmation. Method 5 uses portable check standards. If the measuring equipment is found to be nonconforming, it is returned for a full confirmation. Table 1 presents a summary of typical confirmation intervals. TABLE 1 CONFIRMATION INTERVALS Confirmation Interval - 6 months - single project or campaign of projects - suspected non-conformance identified by surveillance and control whichever is earlier - in-service testing - suspected non-conformance identified by surveillance and control whichever is earlier - in-service testing - suspected non-conformance identified by surveillance and control whichever is earlier
Measuring Equipment Component Measuring Instrument
Records
Penetration Sensor
- in-service testing data in project file - surveillance and control data in project file - in-service testing data in project file - calibration data certificate for portable check standard available on site and in Fugro calibration laboratory - surveillance and control data in project file
Data Acquisition System
Page 2 of 3
FEBV/GEN/APP/001
Fugro 1994-2000
ISSUE 05
- calibration data certificate available on site and in Fugro calibration laboratory - surveillance and control data in project file
METROLOGICAL CONFIRMATION SYSTEM FOR IN-SITU TEST
MEASURING INSTRUMENT The calibration of the measuring instruments (for example, a cone penetrometer) takes place in the Fugro calibration laboratory. The calibration facilities of the laboratory have traceability to the Dutch NMi (Nederlands Meet-instituut) measurement standards. The confirmation interval for the laboratory is 12 months in accordance with Method 3 of ISO 10012-1. For example, the calibration of the piezo-cone penetrometer covers four components, namely (1) the load sensors for determination of cone resistance (qc) and sleeve friction (fs), (2) the pressure sensor for determination of water pressure (u), (3) the inclinometer for determination of the inclination of the cone penetrometer from vertical, and (4) the geometry. Practice details are as follows: Load sensor calibration is by a special test loading facility. The test loading facility provides the following calibration data: (1) the calibration factors for the specified measuring range and (2) the zero-load offsets. The pressure sensor calibration takes place in a special pressure vessel for cone penetrometers. A special test frame provides calibration data for the inclinometer. The calibration data are as for the load sensors. The calibration of the geometry of the cone penetrometer is by vernier calliper length measurements. This allows checking of the geometrical tolerances for the various diameters and lengths of the cone penetrometer components. Some in-situ test methods include measurements that are continuous with penetration (z). This requires use of a penetration sensor. The common method is to use a rotary pulse encoder, with rotation mechanically coupled to the moving crosshead. An exception is the downhole WISON system, which derives penetration data from measuring the flow of the hydraulic fluid used to advance a push rod. The in-service testing is by survey tape length measurements of actual penetration. DATA ACQUISITION SYSTEM The data acquisition system provides the link between the electrical output signals of the measuring instrument and the digitally recorded data. This link includes the transmission cable, the connectors, the analogue/digital converter and the data recording software. Fugro operates the VRB (Voltage Reference Box) for in-service testing. The VRB simulates the instrument output signals by transmission of known output signals through the data acquisition system. Each VRB includes a NMi calibration certificate. The confirmation interval for the VRB is 12 months in accordance with Method 3 of ISO 10012-1. SURVEILLANCE AND CONTROL Controlled laboratory conditions do not apply to in-situ tests. Surveillance and control of the measuring processes are, therefore, important to promote confidence in the test results. The field checks applied by Fugro can comprise the following, depending on the type of the in-situ test system and the mode of deployment: - General review of the in-situ test signatures for the expected ground conditions. - Visual inspection of the geometry of the measuring instrument and push rods upon retraction. - Visual inspection of the transmission cables and connectors. - Checks and monitoring of the zero-load offsets before and after each test. This provides an indication of the uncertainty of the test results. - Checks and monitoring of the response of the load and pressure sensors to water depth, in case of underwater deployment. This provides an indication of the performance of the sensors. - Monitoring of the pressure in the hydraulic thrust machine. This permits the calculation of the total force required for penetration. - Time checks. Real time of the clock of the recording apparatus provides the basis for recording of some measurands (for example qc, fs, u and z). Together, time and penetration measurements permit checks on the standardised penetration rate. REFERENCES International Organization for Standardization ISO (1992), "Quality Assurance Requirements for Measuring Equipment - Part 1: Metrological Confirmation System for Measuring Equipment", ISO 10012-1:1992(E).
Fugro 1994-2000
ISSUE 05
FEBV/GEN/APP/001
Page 3 of 3
HANDLING OF RECOVERED SOIL SAMPLE PROCEDURE
1.0 1.1
PURPOSE The purpose of this work practice is to define the actions to be taken after the recovery of a soil sample from a borehole.
2.0 2.1
SCOPE This work practice covers the operations involved with handling of soil samples recovered including equipment, methods and personnel.
3.0 3.1 4.0 4.1 5.0 5.1
REFERENCES Fugro Laboratory Testing Procedures DEFINITIONS & ABBREVIATIONS FSIN Fugro Singapore Pte Ltd
RESPONSIBILITIES The Laboratory Manager (FSIN) is responsible for ensuring all FSIN Equipment ie laboratory equipment is checked and transported to the vessel. The Vessel Chief Engineer is responsible for ensuring that all vessels supplied laboratory equipment/services (e.g. power, lighting etc) is operational. The Team Leader has overall responsibility for handling soil samples in the offshore laboratory. PROCEDURES Handling of Downhole Soil Sampling Depending on the Contract requirements, the samples will either be sealed in the sample tube or extruded.
5.2
5.3
6.0 6.1
6.2
Extruding Samples from Sample Tube 1. Generally the samples are recovered below the seabed in a thin-walled stainless steel shelby tube. 2. The internal diameter of the tube varies from 2 inches to 3 inches depending on the stiffness of the soil. 3. These shelby tubes are lowered to the required depth and is either pushed or hammered into the soil whichever method is applicable. 4. Torvane and miniature vane tests are performed on all cohesive samples while sample is still in the tube.
DOC REV / DATE
: FSEAG-HP-9 HRS-HandlingRecoveredSoilSamples.doc : 0 / SEP-02
PAGE
1 OF 2
HANDLING OF RECOVERED SOIL SAMPLE PROCEDURE
5. With the aid of a hydraulic extruder, the soil sample is then pushed out of the tube and is collected in a sample holder to its full length. 6. The extruded cores are cut into 6 inches length and first wrapped in a thin cling wrap followed by wax paper (when specified) and finally wrapped in a aluminium foil. 7. Wrapping a core in three different wrappers is to preserve the sample in its natural moisture and state. 8. Before wrapping the core, a representative portion is taken and tested for density and moisture on site. 9. There may be other routine tests done on site as requested by the engineer. 10. The sample in aluminium foil is then sealed in a PVC pipe to prevent damage or shocks. 11. These samples are marked according to their location, sample numbers and depths. They are transported to the laboratory in crates. 12. A record of the samples is maintained by the technician on board. 13. A copy of the record will be sent to the laboratory along with the assignment for the test to be carried out. 6.3 Sealing Samples in Sample Tube 1. When a portable laboratory is not available, the shelby tubes are sealed on both ends with paraffin wax and further sealed with masking tapes. 2. The samples are marked according to their location and depths. 3. The samples are sent to the laboratory at the end of the day in the case of local job or at the end of the project for overseas job. 4. A record of the samples sent to the laboratory is maintained by the laboratory technician as well as the field personnel. 5. Samples required for testing are extruded in the laboratory and the respective tests are carried out. 7.0 7.1 SAFETY Overall Supervision of the drill floor shall be under the direct supervision of the Vessels Master and in his absence the Driller on shift. The Team Leader is responsible for ensuring safe operations within the offshore laboratory All operations shall be carried out by experienced personnel. A JHA shall be made prior to all new or hazardous operations and all personnel involved shall read and if necessary implement additional safety measures as required. - End of Document -
7.2
7.3 7.4
DOC REV / DATE
: FSEAG-HP-9 HRS-HandlingRecoveredSoilSamples.doc : 0 / SEP-02
PAGE
2 OF 2
LABORATORY TEST PROCEDURES Classification Tests
1.0
CLASSIFICATION TESTS (ASTM D 2487-00) When samples are returned to the laboratory, more extensive tests can be performed. After a visual examination the soil is classified in accordance with the Unified Classification System (described in ASTM Designation D 2487), and, where applicable, on the results of Atterberg Limits and particle size distribution of the samples. Classification based on BS 5930: 1981 Section 8 can be performed upon request.
1.1
Particle Size Analysis (BS 1377: Part 2: 1990 Sections 9.2 and 9.5; ASTM D 422-63 [Re-approved 1998]) Particle size distributions can be performed by means of sieving, hydrometer tests, or both, depending on the distribution of particle size. The percentage of weight of the various particle sizes in excess of 63 microns (BS) or 75 microns (ASTM) is determined by sieving through a set of various standard sieves in an electric shaker with horizontal and vertical motion. Wire sieves are used up to and including a sieve opening of 2.0 mm. Plate sieves with a sieve opening of more than 2.0 mm are used when more than 5% of the weight of the specimen is retained on the 2.0 mm sieve. When there is a considerable amount of particles smaller than 63 or 75 microns, the sieving is complemented by a hydrometer test, in which the sample is mixed with water and stirred for about 15 minutes. An additive sodium hexametaphosphate solution prevents flocculation of the soil particles. After mixing, the density of the water-soil slurry is measured at fixed time intervals. With this information the particle size distribution of the sedimented particles can be determined.
1.2
Atterberg Limits (BS 1377: Part 2: 1990 Sections 4 and 5; ASTM D 4318-00) Tests to determine the Atterberg Limits can be performed on soil samples of cohesive material. The soil is dried, ground in a mortar into separated grains. All soil grains larger than a No. 40 sieve size are removed. The soil is then thoroughly mixed with different quantities of distilled water. These liquid limit (the water content of a soil at the arbitrarily defined boundary between semi-liquid and plastic states) and plastic limits (the water content of a soil at the boundary between the plastic and semi-soil states) of the soil are then determined. The liquid limit is determined using One-Point Casagrande Method.
1.3
Unit Weights (BS 1377: Part 2: 1990 Section 7.2) Unit weights are computed from the wet and dry weights of a standard volume of soil. The dry weight is obtained after the wet standard volume of soil has been dried for 24 hours at a temperature of 105C to 110 C. Although unit weights are routinely determined from direct measurement of sample weight and volume, soils that are fully saturated in place may expand and become partially saturated as the overburden pressure is relieved or as dissolved gas in the pore water comes out of solution during sample retrieval. For these reasons, the unit weights determined for the recovered samples will probably be less than the in-situ unit weights. In-situ unit weights can be estimated by backfiguring from water content and specific gravity values, assuming full saturation and using the following equation:
' = G (1 + 0 . 01 w ) 9 . 81 s 10 . 06 (1 + 0 . 01 w G s )
where,
submerged unit weight, kN/cu m
LAB-010
November 2005
Page 1 of 2
LABORATORY TEST PROCEDURES Classification Tests
w = water content, percent = specific gravity of solids Gs For cohesive soils, Gs, can be computed as follows:
Gs = 0.000772 ( w L ) + 2 .667
where, 1.4
wL
liquid limit, percent
Moisture Content (BS 1377: Part 2: 1990 Section 3.2; ASTM D 2216-98) To determine the moisture content of the soil, the wet sample is dried for 24 hours at a temperature of 105C to 110C. The loss in weight of the sample due to drying represents the weight of the moisture of the soil. The moisture content of the soil is presented as percentage of the dry weight of the soil.
1.5
Specific Gravity (BS 1377: Part 2: 1990 Section 8.3; ASTM D 854-00) Specific gravity of the soil is determined by means of stoppered bottles having a volume of 100 ml (BS) or pycnometer of volume 500ml (ASTM). The bottle is filled with distilled water and weighed and the unit weight of the water can then be determined. About 20g(BS) or 50g(ASTM) of dry crumbled soil is placed inside the bottle/pycnometer and distilled water is added to the soil. Entrapped air is removed from this mixture by subjecting the contents of the bottle to boiling or vacuum or both. The bottle is then completely filled with distilled water until the indicated marker (ASTM), allowed to settle and then weighed with the stopper (BS). The unit weight of the particles of the soil can be computed with these data and the weight of the dry soil used. The weights are determined at a temperature of bottle and contents of 20C.
1.6
Soil Colour The soil colours are measured by comparison with a Munsell soil colour chart. (Reference: Munsell Soil Colour Charts, 1975 Edition). Accurate comparison is obtained by holding the soil sample directly behind apertures separating the closest matching colour chips. The soil colours are described by: colour names the Munsell notation of colour In the Munsell system, the colours are systematically arranged in accordance with the three variables that combine to describe all colours. In the Munsell system, these variables are known as Hue, Value and Chroma. The Hue notation of a colour indicates its relation to Red, Yellow, Green, Blue and Purple. The Value notation indicates its lightness. The Chroma notation indicates its strength (or departure from a neutral of the same lightness).
LAB-010
November 2005
Page 2 of 2
LABORATORY TEST PROCEDURES Undrained Shear Strength Tests
1.0
ROUTINE PROCEDURE FOR UNDRAINED SHEAR STRENGTH TESTS Several procedures were used in the field and in our laboratory to determine the shear strength or shearing resistance of cohesive soils under various stress conditions. The test procedures used and the presentation of test results are described in the following paragraphs, and where applicable are also mentioned in the main text.
1.1
Pocket Penetrometer The main parts of a pocket penetrometer are a stylus, a calibrated spring, a scale and an indicator ring. The stylus is pushed with steady pressure into the soil until a penetration of one stylus diameter is reached. By the compression of the spring, the indicator ring is moved along the scale and holds automatically at the position corresponding to the maximum compression of the spring. The unconfined compressive strength can be read directly from the scale. The undrained shear strength of the soil is taken as half the unconfined compressive strength. The capacity of the pocket penetrometer is 450 kPa (Soil Test CL 700). For very hard clays, the stylus can be reduced in diameter to increase the testing capacity of the instrument up to 900 kPa.
1.2
Torvane The main parts of a torvane are a metal disk with thin radial vanes projecting from one face, a calibrated torsional spring, a scale and an indicator. A flat surface is prepared on the cohesive sample and the disk is pressed carefully against this surface until the vanes are fully embedded. Maintaining a constant vertical load by finger pressure, a knob attached to one end of the spring, is slowly turned at a constant rate to provide a torque on the vane. The soil enclosed within the vanes will be sheared from the sample at a certain torsional moment. By the torsion of the spring, the indicator is moved along the scale and holds automatically at the position corresponding to the maximum torsion of the spring. The torsional spring is calibrated to indicate directly the shear strength of the soil. The torvane has a maximum capacity of 20, 100 or 250 kPa, depending on the adapter used (Soil Test CL 600 or CL 604 respectively).
1.3
Miniature (Motor) Vane (ASTM D 4648-00) This type of test is very similar to the torvane test, only the torque applied is machine controlled. A calibrated 4-bladed vane fastened to the bottom of a vertical rod is pushed into the soil at the bottom of the sample tube. The torque required to turn the vane via a calibrated spring is recorded. The undrained shear strength thereafter is derived from calibration charts, presented vane/spring curves as torque versus undrained shear strength.
1.4
Unconfined Compression Test (BS 1377: Part 7: 1990 Section 7; ASTM D 2166-00) This type of test is performed on undisturbed samples of cohesive soils. Depending on the consistency of the cohesive material the test is performed on a trimmed specimen or on a specimen with the original diameter of the sample. During the axial loading no confining pressure is applied on the sample and drainage of pore water can occur. The test is single stage and stopped on reaching the maximum deviator stress. The results of the test are presented in a curve giving deviator stress versus axial strain. The undrained shear strength, defined as half of the ultimate deviator stress, can be derived from this curve.
LAB-020
November 2005
Page 1 of 1
LABORATORY TEST PROCEDURES Triaxial Compression Tests
1.0 1.1
TRIAXIAL TESTS Unconsolidated-Undrained Triaxial Test (BS 1377: Part 7: 1990 Sections 8 and 9; ASTM D 285095 [Re-approved 1999]) This type of test is performed on undisturbed or remoulded samples of cohesive soils. Depending on the consistency of the cohesive material, the test specimen is prepared by trimming the sample or by pushing a mould into the sample. A rubber membrane is placed around the specimen. A confining pressure equal to the estimated in-situ total overburden pressure or to the maximum cell-pressure (1000 kPa) is applied on the sample. During the axial loading of the specimen the confining pressure is kept constant and drainage of pore water is not allowed. The test is strain controlled at the rate of 2 percent per minute. The height to diameter ratio of the sample is about 2 and the test is carried out to either the maximum deviator stress reached or failure. Either single stage or multi-stage tests are carried out depending on soil type. The results of the test are presented in a curve giving deviator stress versus axial strain. The undrained shear strength, defined as half the ultimate deviator stress, can be derived from this curve.
1.2
Consolidated-Undrained Triaxial Compression Test (BS 1377: Part 8: 1990 Section 7; ASTM D 4767-95; K H Head, Vol 3) A consolidated-undrained triaxial test has three stages: saturation, consolidation or back-pressuring and shear. During these three stages the effective stresses are monitored by pore pressure and total stress measurement. Saturation of the sample is achieved by applying cell pressure increments until adequate pore pressure response is obtained. A ratio of pore pressure increment to confining pressurement increment in excess of 0.95 is considered an acceptable degree of saturation. The sample volume or water content is not altered during the saturation stage so that the residual effective stress is observed for comparison with that of an ideal sample (Skempton and Sowa, 1963). Consolidation or back pressuring can be omitted if the required effective stress condition develops during saturation. If not, the required effective stress is obtained by adjustment to the pore pressure and volume of water in the sample. An effective stress approximately equal to the computed in-situ mean effective stress was used in these tests. Once the desired effective stress condition was reached, specimens were loaded axially to failure without further drainage at a rate of one percent per hour which is slow enough to allow equalisation of pore pressures throughout the samples. The measured undrained shear strength are plotted on the boring logs and tabulated on the summary of the test results.
1.3
Consolidated Drained Triaxial Compression Test (BS 1377: Part 8: 1990 Section 8; K H Head, Vol 3)) The specimen of dry soil is prepared in the rubber membrane on the base of the triaxial cell. Soil particles larger than 20% of the diameter of the specimen are removed. The sample is compacted to a density as close as possible to the undisturbed dry density. After finishing the complete set-up, the specimen is consolidated under the isotropic cell-pressure. Back pressure is applied to dissolve possibly entrapped gas. When the sample is fully consolidated, axial loading is applied at a sufficient slow rate to permit drainage during the shearing phase. The confining pressure is kept constant during each loading stage. Generally the complete test has three consolidation and loading stages of increasing pressure. A plot of the results of each stage in accordance with the Mohr criterion of shearing failure, defines the angle of internal friction and the cohesion intercept, c.
LAB-030
July 2004
Page 1 of 1
ENGINEERING METHOD STATEMENT Ultimate Axial Pile Capacity - API
SINGLE PILE ULTIMATE STATIC BEARING CAPACITY
1.0
GENERAL The ultimate static bearing capacity of an open-ended pipe pile is given by: Qult where, Qult fs As fi Ai qp Aw = = = = = = = = fsAs + fiAi + qp Aw
ultimate static capacity unit outside shaft friction outside shaft area of pile unit inside shaft friction inside shaft area of pile unit end bearing capacity cross-sectional area of steel wall at toe of pile
Under certain conditions the accumulated internal skin friction may exceed the ultimate static capacity of the soil below the toe of the pile. The pile then behaves as if it is close-ended or plugged. Its static capacity is then given by: Qult where, Ap = = fsAs + qpAp
gross end bearing area
Ultimate unit values of skin friction and end bearing at any depth are calculated in accordance with the criteria defined in the publication Recommended Practice for Planning, Designing and Constructing Fixed Offshore Platforms - Working Stress Design, API Recommended Practice (RP 2A-WSD), 21st Edition, 2000. A copy of the criteria used to calculate unit values of skin friction and end bearing in coarse-grained and fine-grained soils is presented on pages 2 and 3 of this method statement. It should be noted that following current Fugro Singapore practice, the ultimate unit friction in coarse-grained soil is calculated using a modified k value of 0.5 for tensile loads. These values are not in accordance with the current API recommendations but are used as a result of a thorough review of pile load test data performed by Toolan and Ims (1988), who presented data which indicated that the higher friction values given by the current API recommendations may be unconservative for pile design. If the recommendations given RP 2AWSD have not been adhered to in any soil strata, this will be noted in the main text.
EM-010
March 2003
Page 1 of 4
ENGINEERING METHOD STATEMENT Ultimate Axial Pile Capacity - API
2.0
GRANULAR SOILS UNIT SHAFT FRICTION f = k.vo.tan where, vo Nq k = = = = = = UNIT END BEARING qe = vo. Nq Effective overburden pressure Angle of friction between soil and pile wall Bearing capacity factor for deep foundation Coefficient of lateral earth pressure 0.8 (compressive loads) 0.5 (tensile loads)*
Design Parameters for Coarse-Grained Soil** Soil-Pile Friction Angle (Degrees) 15 Limiting Friction (kPa) Limiting End Bearing (MPa)
Density
Soil Type
Nq
Very loose Loose Medium Loose Medium Dense Medium Dense Dense Very Dense Dense Very Dense * ** ***
Sand Sand-Silt*** Silt Sand Sand-Silt*** Silt Sand Sand-Silt*** Sand Sand-Silt*** Gravel Sand
48.0
1.9
20
67.0
12
2.9
25
81.0
20
4.8
30
96.0
40
9.6
35
115.0
50
12.0
Modified k value (API recommended value is 0.8). See Page 1 for explanation. Where detailed information such as in-situ cone tests is available, values and limits may be modified. Sand-Silt includes those soils with significant fractions of both sand and silt. Strength values generally increase with increasing sand fractions and decrease with increasing silt fractions.
EM-010
March 2003
Page 2 of 4
ENGINEERING METHOD STATEMENT Ultimate Axial Pile Capacity - API
3.0
COHESIVE SOILS UNIT SHAFT FRICTION f = cu where, cu = = UNIT END BEARING qe = 9 cu A dimensionless factor, derived as outlined below Undrained shear strength of the soil at the point in question
.
3.1
Method Outlined in Main Text of API RP 2A (2000) Derivation of :
= c 0.5 u ' vo c 0.5 u ' vo
0.5
for
cu ' vo cu ' > vo
1.0
0.25
for
1.0
where,
vo
Effective overburden pressure at the point in question
3.2
Method Outlined in the Commentary of API RP 2A (2000) 3.2.1 Method 1
This procedure, referred to as API Commentary Method 1 in this report (if applicable), is described in the April 1986 edition of the API RP 2A and reproduced in the Commentary (C6.4) of the current API RP 2A. In this procedure, the unit skin friction in clays is based on a combination of the following three concepts: (1) Soil-pile adhesion may be equal to but not greater than the shear strength indicated by the design shear strength, Soil-pile adhesion in stiff, overconsolidated clays should not exceed 48 kPa for shallow penetrations, and Soil-pile in stiff clays at deep penetrations may be as great as the shear strength that would be expected for normally consolidated clays.
(2)
(3)
For normally consolidated clays, the cu/vo ratio has been correlated with clay plasticity characteristics. This correlation is given by the following expression: (cu/vo)nc where, cu vo p = = = = 0.11 + 0.0037 (p)
undrained shear strength of normally consolidated clay effective overburden pressure the plasticity index from Atterberg Limit determinations, = (liquid limitplastic limit)
EM-010
March 2003
Page 3 of 4
ENGINEERING METHOD STATEMENT Ultimate Axial Pile Capacity - API
3.2.2
Method 2
Similarly, this procedure is referred to as API Commentary Method 2 in this report, if applicable. This procedure is more appropriate for low plasticity clays or highly overconsolidated clays. Derivation of :
= 1 .0 0.5 (c u 24) 48 for cu 24 kPa
1.0 -
for
24 kPa <
cu
< 72 kPa
0.5
for
cu
72 kPa
4.0 4.1
REFERENCES American Petroleum Institute RP 2A, Recommended Practice for Planning, Designing and Constructing Fixed Offshore Platforms - Working Stress Design, 21st Edition, December 2000. Toolan, F.E. and IMS, B.W., Impact of Recent Changes in the API Recommended Practice for Offshore Piles in Sand and Clays, Oceanology International Conference, 1988.
4.2
EM-010
March 2003
Page 4 of 4
ENGINEERING METHOD STATEMENT Axial Load Deflection Data
GENERATION OF SINGLE PILE AXIAL LOAD-DEFLECTION DATA FOR STRUCTURAL ANALYSIS PROGRAMS
1.0
GENERAL The analysis of single pile axial load-deflection behaviour is generally performed using a beamcolumn type of program, in which the axial soil resistance is modelled by the use of non-linear springs, applied at discreet points down the length of the pile. In the structural analysis programs, the springs are Winkler springs, attached to fixed points in space. The springs along the side of the piles are generally termed T-z curves, and the base spring is termed the Q-z curve. The methods used to define the shape of these non-linear curves, and also the ultimate resistance values at any given depth, are based on the general approaches recommended in the American Petroleum Institute Recommended Practice RP 2A - WSD, 2000. An outline of the methods used to derive the T-z and Q-z data is given below.
2.0 2.1
T-Z DATA Cohesive Soils Axial load-deflection curves giving mobilisation of skin friction with respect to relative displacement between pile and soil (T-z curves) are calculated using the method recommended by the American Petroleum Institute in their Recommended Practice RP 2A WSD, 2000. The form of the T-z data up to peak friction in cohesive soils is tabulated on the following page in this method statement. The peak resistance value, Tmax, is equated to the peak unit friction as determined for ultimate static pile capacity. Unless otherwise stated in the main text of this report, the value of deflection at which peak resistance is achieved, zmax, is assumed to be 1.0 percent of the external pile diameter, as recommended by API. As noted by API, there are some clays which may be expected to exhibit some reduction in friction post-peak. For these clays, API recommended that the reduction be assumed to occur over a further 1.0 percent of pile diameter, and that typical values of 0.7 to 0.9 times the peak resistance should be considered. Any implications of this post-peak reduction are discussed in the main text of this report.
T/Tmax 0 0.3 0.5 0.75 0.90 1.00 0.70 to 0.90 T-z Data for Cohesive Soils
z/zmax 0 0.16 0.31 0.57 0.80 1.00 2.00
EM-100
March 2003
Page 1 of 2
ENGINEERING METHOD STATEMENT Axial Load Deflection Data
2.2
Cohesionless Soils The form of T-z data used in cohesionless soils is again based on the recommendations of the American Petroleum Institute. The recommended curve simply consists of a straight line up to peak resistance at a zmax value of 2.5 mm. There is no reduction in the Tmax value post-peak. The maximum unit skin friction in compression and tension, Tmax, is the ultimate unit skin friction as derived for static pile capacity.
T/Tmax 0 1.00 1.00
z (in.) 0 0.10
3.0
Q-Z DATA The form of the load-deflection curves for end bearing resistance is also based on the recommendations of the American Petroleum Institute, and is tabulated below. The shape of the Q-z curves is the same in both cohesive and cohesionless soils. The zmax value is taken as 10 percent of the pile external diameter. The peak resistance value is based on the available end bearing at any given depth.
Q/Qmax 0 0.25 0.50 0.75 0.90 1.00
z/zmax 0 0.02 0.13 0.42 0.73 1.00
Q-z Data for Both Cohesive and Cohesionless Soils
4.0 4.1
REFERENCE American Petroleum Institute RP 2A, Recommended Practice for Planning, Designing and st Constructing Fixed Offshore Platforms - Working Stress Design, 21 Edition, December 2000.
EM-100
March 2003
Page 2 of 2
ENGINEERING METHOD STATEMENT Lateral Load Deflection Data
SINGLE PILE LATERAL LOAD-DEFLECTION DATA
1.0
GENERAL The analysis of single pile lateral load-deflection behaviour is generally performed using a beamcolumn type of program, in which the lateral soil resistance is modelled by the use of non-linear Winkler springs, applied at discreet points down the length of the pile. These springs are generally termed P-y springs. The methods used to define the shape of these non-linear curves, and also the ultimate resistance values at any given depth, are based on the general approaches recommended in the American Petroleum Institute Recommended Practice RP 2A, 2000. The main references are outlined below.
1.1
Cohesive Soils P-y data in cohesive soils of all shear strengths are generally derived using the method proposed by Matlock (1970) for soft clay.
1.2
Cohesionless Soils P-y data in granular soils are generally derived using the method proposed by ONeill M.W. and Muchinson, J.M. (1983).
1.3
Scour In determining the p-y data, assumptions have to be made regarding the amount of scour which will occur around the piles. Two forms of scour are considered: general, or global scour, which has the effect of reducing the overburden pressure around the pile at any depth, and local scour, which is considered as lack of pile-soil contact.
2.0 2.1
REFERENCES American Petroleum Institute RP 2A, Recommended Practice for Planning, Designing and st Constructing Fixed Offshore Platforms - Working Stress Design, 21 Edition, December 2000. Matlock, H (1970). Correlations for Design of Laterally Loaded Piles in Soft Clay. Proc. 2nd Offshore Technology Conference, Houston, Paper No. OTC 1204. ONeill, M.W. and Murchinson, J.M. (1983). An Evaluation of P-y Relationships in Sand. A report to the American Petroleum Institute. Reese, L.C., Cox, W.R. and Koop, F.D. (1974) Analysis of Laterally Piles in Sand. Proc. 4th Offshore Technology Conference, Houston, Paper OTC 2080.
2.2
2.3
2.4
EM-200
March 2003
Page 1 of 1
ENGINEERING METHOD STATEMENT Pile Driveability
1.0
INTRODUCTION Analysis of a pile under the action of an impact pile-driving hammer is based on an energy balance. The energy delivered by the hammer is lost in the driving system, pile and soil. Important hammer/pile/soil characteristics may be derived from pile driving analysis. Various approaches are available for pile driving analysis. The conventional approach is based on a lumped-mass wave equation model. More advanced 1-D or 2-D Finite Element models may be applied for non-routine problems such as driving analysis of curved piles through sleeves (Fischer, 1975), and estimation of displacements within the soil mass including assessment of plugging behaviour of low displacement piles (Chow, 1981). The report concerns conventional wave equation analysis, and associated interpretation and monitoring techniques.
2.0
WAVE EQUATION ANALYSIS The conventional model for dynamic is a lumped-mass equation developed by Smith (1960) for pile driving applications. In this one-dimensional model, the hammer, driving system (anvil, helmet, etc.) and pile are represented by a series of springs and dashpots. The frictional resistance at the pile/soil interface is represented by a series of springs and dashpots and the tip resistance by a single spring and dashpot. The wave equation is solved by using a finite difference solution. Engineering software used by Fugro Singapore for conventional dynamic analysis includes the following computer programs: GRLWEAP by Pile Dynamics Inc. WAVEQ by Fugro-McClelland (1989) PILE by Fugro-McClelland (1990)
Other options include bottom-driving hammer/pile configuration, and multiple blow analysis. A multiple blow analysis allows for build up of residual stresses in the pile and soil, as a result of driving. It is likely to give more realistic modelling for long, slender piles. 2.1 Hammer The ram of an impact hammer is modelled by masses and springs. Optionally, allowance may be made for separations and non-linear deformation caused by ram impact on the impact block (or helmet). The impact energy is derived from the masses of the ram and the stroke. In case of closed end hammers (double acting), the ram not only falls under gravity but also experiences a downward pressure force. This is modelled by replacing the actual stroke with an equivalent stroke. For diesel hammers, impact energy is also obtained by compression of air followed by combustion of fuel injected on the impact block. Additional parameters for modelling include combustion pressure and combustion timing. Hammer energy losses not only occur during ram descent but also during impact. Conventional practice to allow for losses is application of an efficiency factor to ram energy. Average modelling parameters based on field monitoring are available for the more common types of hammers. Differences in modelling parameters and actual parameters should be expected because of factors such as operating conditions and state of hammer maintenance.
EM-300
August 2004
Page 1 of 4
ENGINEERING METHOD STATEMENT Pile Driveability
2.2
Driving System The driving system consists of an anvil, hammer cushion, helmet, and pile cushion, as appropriate. This system is usually simplified by two springs, a mass and a dashpot. Optionally account may be taken of splice effects by introducing one or more of the following parameters: slack, coefficient of restitution and round-out deformation. These parameters allow non-linear force-deformations and notension conditions.
2.3
Pile The pile model consists of a series of segments, each of which includes a spring and a mass. Modelling options include viscous pile damping, splices and carrying pile material properties along the pile length. Parameters for the pile model can be estimated with reasonable accuracy.
2.4
Soil The soil model basically consists of a series of springs and dashpots. The elastic spring yields at a pile-soil displacement equate to the soil quake. There is then no further increase in the (static) soil resistance (hereinafter referred to as SRD). The reverse situation applies for unloading. The conventional Smith damping model assumes soil-damping resistance to be proportional to the damping factor multiplied by pile (segment) velocity and SRD. Other options for damping include truly viscous soil damping and Case viscous damping. Truly viscous damping is applied for multiple-blow wave equation analysis, while Case damping should be adopted only where considerable experience with soil and pile type exists. The distribution of SRD, quake and damping along the pile can be user-specified. resistance is determined separately. Pile tip soil
Generally, determination of SRD may be subject to considerable uncertainty. A similar comment applies to quake and damping, but to a lesser degree. 2.5 Numerical Procedure The numerical procedure for single-blow analysis includes a finite difference solution which is generally continued until partial rebound of the pile has occurred. Hammer and pile forces, velocities and displacements as well as static and damping soil forces are calculated throughout the numerical analysis. The permanent pile set is computed by taking the difference between the maximum pile top displacement and the average quake. The multiple-blow analysis continues after the normal analysis, by using the calculated displacements and soil forces together with the quakes. These are used for prediction of displacements and forces at which pile and soil will be in equilibrium (zero velocity). A second wave equation analysis is then performed with these displacements and forces as initial values. This procedure is repeated until numerical convergence has been achieved.
3.0
APPLICATIONS Important applications for pile driving analysis comprise: Prediction of pile driveability, to facilitate selection of economical hammer/pile combinations, and associated installation procedures Back-analysis of pile installation records, to determine confirmation with (dynamic) pile acceptance criteria, or to estimate static compressive pile behaviour.
EM-300
August 2004
Page 2 of 4
ENGINEERING METHOD STATEMENT Pile Driveability
It is noted that prediction of pile driveability may incorporate back-analysis of records available for comparable conditions. 3.1 Driveability Pile driveability prediction usually relies on conventional modelling of the hammer, driving system and pile, for which typical parameters are mostly readily available. Modelling of the soil is more difficult, as it requires estimation of the soil resistance during driving (SRD) in conjunction with soil quake and damping. Results of driveability analyses may be used to: Estimate blowcount (or pile set) for a selected hammer-pile-soil combination; Predict pile stresses.
The conventional procedure for SRD prediction comprises primarily correlation of SRD with ultimate static pile capacity. This includes assessment of the distribution of pile shaft and tip resistances. The correlation may be refined by back-analyses of appropriate pile driving data and soil data as well as results of in-situ test whenever possible (for example CPT results). The SRD differs from the static capacity because of factors such as: Procedures for ultimate static pile capacity calculation usually include conservative assumptions, while SRD prediction frequently requires best estimate or worst case analyses; Large pile/soil movements occur during driving, which temporarily and permanently affect soil stresses and pore pressure; Open-ended tubular piles and low displacement piles often exhibit non-plugging soil behaviour during driving and partial or complete plugging behaviour under static load conditions.
It is therefore necessary to base correlations between SRD and static capacity on regional or site-specific experience with specific hammers and pile types. Furthermore, the correlations are valid only for specific modelling procedures (for example single-blow versus multiple-blow analysis), and assumptions about soil quake and damping. SRD prediction for low displacement piles (for example open-ended pipe piles) requires further attention as the driving behaviour is more complex than that of full displacement piles. The main reason for this is inertia effects of soil adhering to the pile during driving. For pipe piles, the dynamics of the inner soil plug are different from those of the pile or the outer soil. The practice adopted by Fugro Singapore is to incorporate these effects in SRD prediction, rather than to use modified pile, soil quake or damping parameters 3.2 Back-Analysis Back analysis of pile driving may be done on the basis of a conventional driving record (blowcount and ram stroke versus pile tip penetration). Modelling of the hammer, driving system and pile requires estimates about actual performance of the hammer and driving system. Modelling of the soil should be consistent with the intended application. It is usually based on estimates of soil quake and damping, so that SRD is computed. SRD can be correlated to static bearing capacity, in particular if information is available for pile set-up effects. In some cases, set up effects may be estimated reliably by comparison of SRD back-analyses applicable to driving conditions immediately before and immediately after a driving stop. Back-analyses can be improved if results are available from hammer or pile head monitoring. Hammer monitoring allows more insight into actual hammer efficiencies during driving. Modelling of the hammer and driving system can be completely eliminated if results from pile head monitoring are available. Pile head monitoring is usually conducted by means of accelerometers and strain gages. The data from
EM-300
August 2004
Page 3 of 4
ENGINEERING METHOD STATEMENT Pile Driveability
these instruments can be processed to give force and velocity versus time curves. These curves can serve as input for wave equation analysis. Pile head monitoring records also allow more rigorous interpretation of pile driving, including detection of any pile damage and estimation of static pile load-deflection characteristics. The interpretation techniques are incorporated in the CAPWAP (CAse Pile Wave Analysis Program) analysis that is based on trial-and-error matching of force and velocity versus time records. Results include more detailed estimates of SRD, soil quake and damping, and the distribution therefore along the pile. Pile capacity estimates determined by CAPWAP analyses may reduce and, in some cases, replace requirements for conventional monotonic pile load testing.
4.0 4.1
REFERENCES Chow, Y.K. (1981), Dynamic Behaviour of Piles, Ph.D Thesis, Manchester University. incorporated in Fugro-McClelland program YKCOPN). (Analysis
4.2
Fischer J.F. (1975), Driving Analysis for Initially Curved Marine Conductors, OTC 2309, Proceedings 7th Annual Offshore Technology Conference, Houston, Texas. (Analysis incorporated in Fugro-McClelland program CONCUR). Fugro-McClelland (1989), WAVEQ, Computer Program for Pile Driving Dynamics Computer Program Package. Fugro-McClelland (1990), PILE, Program for Expected Blowcount-Depth and Backfigured SRDDepth Computer Program Package. Pile Dynamics Inc. - GRLWEAP, (Wave Equation Analysis of Pile Driving), Computer Program Manual. Pile Dynamics - CAPWAP, (CAse Pile Wave Analysis Program), Computer Program Manual. Smith, E.A.L. (1960), Pile Driving Analysis by the Wave Equation, Jnl. of Soil Mechanics and Foundations Division, ASCE, Vol. 86, August. Roussel, H.J. (1979), "Pile Driving Analysis of Large Diameter, High-Capacity Offshore Pipe Piles". Ph.D. Thesis, Department of Civil Engineering, Tulane University, New Orleans, Louisiana. Heerema, E.P. (1979), "Relationships Between Wall Friction, Displacement Velocity, and Horizontal Stress in Clay and in Sand for Pile Driveability Analysis", Ground Engineering, Vol. 12, No. 1, pp. 55-56.
4.3
4.4
4.5 4.6 4.7
4.8
4.9
4.10 Coyle, H.M. and Gibson, G.C. (1970), Soil Damping Constants Related to Common Soil Properties in Sand and Clays, Texas Transportation Institute, Research Report 125-1, Texas A&M University.
EM-300
August 2004
Page 4 of 4
ENGINEERING METHOD STATEMENT Jack-up Rig Analyses
MOBILE OFFSHORE DRILLING UNIT (MODU)
1.0
INTRODUCTION Mobile jack-up platforms can be divided into two categories according to foundation type: 1. 2. individual footings a single large mat
This report concerns the first category of jack-up platforms, which have three or more legs that can be jacked independently. A common footing type is a large polygonal plate (spudcan) with gently sloping contact surfaces and a central point or tip to provide initial horizontal restraint. At the commencement of operations, the jack-up is floated to the selected location with its legs in an elevated position. The legs are then lowered to the seabed and jacked into the soil until adequate bearing capacity is obtained to support the jack-up with the hull either partially or completely raised out of the water. Each footing is subsequently preloaded to a vertical load equal to or greater than the anticipated vertical design environmental load (Reardon, 1986). After completion of preloading the hull is raised to the desired operating height above sea level.
2.0
GEOTECHNICAL CONSIDERATIONS Important considerations for assessment of footing response are: loading conditions punch-through bearing capacity failure seabed scour seabed instability by oversteepened slopes or differential bottom pressures from waves instability of footprint sides after penetration of a footing repositioning of a jack-up at or close to a footprint from previous leg penetration interaction with a nearby fixed structure
2.1
Load Type The footing response should be adequate for the design static, cyclic and transient loads without excessive movements or vibrations in the platform. These loads consist of operational ship weight and variable load (gravity loads), and environmental loads including some combination of wave, wind, current and occasionally ice forces. Gravity loads are known with reasonable accuracy. However, it should be noted that any jack-ups tilt as a result of leg penetration may lead to attraction of additional footing load, because of transverse shift in the centre of gravity of the platform. This situation can be dangerous for sites with relatively small increases in soil strength with depth, as rapid additional penetration of the footing may take place. Environmental loads are normally estimated on the basis of statistical data or probability (for example 50-year recurrence interval) for a specific geographic region. They are known with least accuracy. The conventional structural model for calculation of footing loads assumes the footing to behave as a pin joint with no rotational restraint.
EM-400
March 2003
Page 1 of 4
ENGINEERING METHOD STATEMENT Jack-up Rig Analyses
2.2
Duration and Frequency of Load Jack-up preloading results provide guidance for assessment of footing behaviour during the time the jack-up is at the selected location. However, longer term soil bearing capacity is not necessarily greater than short term preloading bearing capacity. For example, silts may show lower soil resistance for drained conditions than for undrained conditions. During a storm, the wind, waves and current impose cyclic loads on the jack-up. Cyclic loads may cause progressive accumulation of soil strain and loss of strength. This may be exacerbated by dynamic loads transmitted by, for example, drilling machinery.
2.3
Inclined Load Significant non-vertical forces on the footing usually occur during the storm conditions. Introduction of a horizontal force on the footing will reduce three vertical bearing capacity.
2.4
Punch-Through At some locations, the soil profile includes a stronger layer of soil (with a higher bearing capacity) overlying a weaker layer (with a lower bearing capacity). This situation can be troublesome if the bearing capacity of the stronger layer is sufficient to allow the jack-up to elevate, but is not sufficient to carry the total load. For example, a dangerous situation may arise during ballast preloading, when the increasing preload reaches the maximum resistance of the stronger layer. A footing will then punch through the stronger layer and plunge rapidly into the underlying weaker layer until adequate resistance is encountered at some lower level. It is also possible that punch-through conditions are formed during preloading, for example due to incidental preloading stops which can lead to soil consolidation and hence strength increase immediately below a footing.
2.5
Scour Footing response problems may also be brought on by seabed scour around a footing. This may reduce the bearing area and embedment, both of which reduce footing bearing capacity. Under these influence, a footing will settle until greater contact area or greater bearing capacity is once again adequate to support the footing loads. Seabed scour may occur in sandy soils with high current velocities at seabed.
3.0
ANALYSIS PROCEDURES The following sections provide background information about conventional geotechnical analysis procedures for footing response during preloading and inclined loading. In addition, applications of Finite Element analyses are indicated.
3.1
Preloading Analysis The conventional procedure for leg penetration analysis is to estimate ultimate bearing capacities of a jack-up footing at various depths below seabed. The results are generally presented as a soil resistance versus penetration diagram, which applies only to the corresponding soil profile. The diagram also includes important footing dimensions.
EM-400
March 2003
Page 2 of 4
ENGINEERING METHOD STATEMENT Jack-up Rig Analyses
The theoretical soil model used for leg penetration analysis assumes rigid-plastic soil behaviour (limit analysis). Closed form bearing capacity solutions for this model are available only for special cases, such as an infinitely long, vertically loaded strip footing on the surface of a uniform soil. To analyses actual field problems, it is invariably necessary to take account of factors such as soil layering, footing shape, and inclined and cyclic loading conditions. Guidance in this regard is available from the results of field measurements, model tests and theoretical analyses. The limit analysis soil model adopted by Fugro for preloading conditions (monotonic, axial loading) is based on: Skempton (1951), Vesic (1975), API (1989): bearing capacity factors, depth factors and footing shape factors for a single-layer soil model. Brown and Meyerhof (1969): undrained soil squeezing failure for a two-layer soil model. Young et al, (1984): punch-through failure for a two-layer soil model on the basis of load spread assumptions. Meyerhof (1972): footprints collapse failure for a single-layer cohesive soil model.
Input parameters for the soil model include drained or undrained soil strengths, which are selected on the basis of a best estimate interpretation of soil conditions, and with regard to the type of analysis. The soil parameters may not be appropriate for use in other types of analysis. 3.2 Inclined Loading Analysis The ultimate vertical bearing capacity of a jack-up footing reduces with lateral loading. Conventional practice for estimation for the reduction in bearing capacity is to assume pinned footing support and to ignore any passive soil resistance on inclined or vertical footing surfaces. The soil model assumes rigid-plastic soil behaviour as for leg penetration analysis. The results for a selected vertical load and footing penetration are presented on a V-H interaction diagram. This diagram shows graphically vertical bearing capacity versus horizontal load. The results of such inclined loading analysis may also be used for assessment of the ultimate lateral soil resistance as a function of vertical load. The conventional method of analysis adopted by Fugro is based on Brinch-Hansen (1970) and Det Norske Veritas (1977), and/or Vesic (1975) and API (1989). These recommendations apply to static loading conditions and to a single layer soil model. 3.3 Finite Element Analysis Finite Element Analysis takes into account factors such as soil layering, spudcan shape and soil drainage, and is recommended for situations where: conventional design methods are perceived to be unduly conservative foundation design may benefit from a more thorough analysis (for example to predict displacement within a soil mass or to estimate footing stiffness) complex soil conditions are identified (for example layered soils and calcareous soils) unusual loading conditions are expected
Fugro possesses a suite of finite element programs, both 2-D and 3-D, with various non-linear soil models and soil drainage options.
EM-400
March 2003
Page 3 of 4
ENGINEERING METHOD STATEMENT Jack-up Rig Analyses
Applications to-date have included: spudcan-pile interaction studies (Zwaag and Seters, 1988) spudcan-footprint interaction studies V-H diagrams for conical footings (Fugro-McClelland, 1987) skirt stress estimation
4.0 4.1
REFERENCES API RP 2A, Recommended Practice for Planning, Designing and Constructing Fixed Offshore Platforms Working Stress Designs, 21st Edition, December 2000. Brinch-Hansen, J. (1970), A Revised and Extended Formula for Bearing Capacity, The Danish Geotechnical Institute, Bulletin No. 28. Brown, J.D. and Meyerhof, G.G. (1969), Experimental Study of Bearing Capacity in Layered Clays, Proceedings 7th International SMFE Conference, Mexico City, Vol. 2, pp. 45-51. Det Norske Veritas (1977), Rules for the Design, Construction and Inspection of Offshore Structures, Appendix F, Foundations, Reprint with Corrections, 1980. Fugro-McClelland (1987), Foundation Fixity of Jack-up Units, Report of Joint Industry Study organised by Nobel Denton and Associates Ltd., London. Meyerhof, G.G. (1972), Stability of Slurry Trench Cuts in Saturated Clay, Proceedings of Speciality Conference on Performance of Earth and Earth-supported Structures, Prudue University, Indiana, Vol. 1, Part 2, pp. 1451-1466. Reardon, M.J. (1986), Review of the Geotechnical Aspects of Jack-up Unit Operations, Ground Engineering, October, pp. 21-26. Skempton, A.W. (1951), The Bearing Capacity of Clays, Building Research Congress, London, pp. 180-189. Vesic, A.S. (1975), Chapter 3 - Bearing Capacity of Shallow Foundations. Foundation Engineering Handbook, edited by Winterkorn, H.F. and Fang, H.Y., Von Nostrand Reinhold Company, New York, pp. 121-147.
4.2
4.3
4.4
4.5
4.6
4.7
4.8
4.9
4.10 Young, G., Remmes, B.D. and Meyer, B.D. (1984), Foundation Performance of Offshore Jack-up Drilling Rigs, Journal of Geotechnical Engineering, ASCE, Vol. 110, pp. 860-874. 4.11 Zwaag, v.d., G.L. and Seters van, A.J. (1988), Seabed Movements and their Effects on Offshore Structures, Proc. Int. Symp. on Modelling Soil-Water-Structure Interactions, Kolkman et al. (eds.), Balkema, Rotterdam, pp. 43-53.
EM-400
March 2003
Page 4 of 4
Вам также может понравиться
- Logging While Drilling PDFДокумент37 страницLogging While Drilling PDFArpan BiswasОценок пока нет
- Beyond the Asylum: Mental Illness in French Colonial VietnamОт EverandBeyond the Asylum: Mental Illness in French Colonial VietnamОценок пока нет
- Boundary Layer Thickness and Heat Transfer CalculationsДокумент9 страницBoundary Layer Thickness and Heat Transfer Calculationsannie100% (1)
- Mud Logging Theory, Lag CalculationsДокумент17 страницMud Logging Theory, Lag CalculationsMuhammad NaumanОценок пока нет
- Mud LoggingДокумент29 страницMud LoggingDavidandy0% (1)
- CoringДокумент5 страницCoringmsshahenterОценок пока нет
- Fugro CPT GeotechДокумент2 страницыFugro CPT GeotechSACHIN H. DHAMAPURKARОценок пока нет
- Coring Oprations Alun Whittaker PDFДокумент184 страницыCoring Oprations Alun Whittaker PDFalvaro_massimoОценок пока нет
- Glossary of Drilling Report AbbreviationsДокумент4 страницыGlossary of Drilling Report AbbreviationsFatima Al-nОценок пока нет
- Seadrill AME 2015 NO DROPS Campaign Survey Results RevisedДокумент14 страницSeadrill AME 2015 NO DROPS Campaign Survey Results RevisedIlusion PulidoОценок пока нет
- Lecture 4 - Coring TechniquesДокумент31 страницаLecture 4 - Coring Techniqueshasan sabahОценок пока нет
- Drill floor safety best practicesДокумент22 страницыDrill floor safety best practicesPaul100% (2)
- Drillpipe and Bottom Hole Assembly StandardsДокумент2 страницыDrillpipe and Bottom Hole Assembly StandardsSasan Abbasi100% (1)
- Geology of Arabian Peninsula PDFДокумент14 страницGeology of Arabian Peninsula PDFMohammed Faisal TОценок пока нет
- OMHEC Lifting of Personnel OffshoreДокумент17 страницOMHEC Lifting of Personnel OffshoreLasse WelleОценок пока нет
- Norsok G 001Документ70 страницNorsok G 001Grant HosieОценок пока нет
- Platform Express (Pex) : DescriptionДокумент2 страницыPlatform Express (Pex) : DescriptionKhawaja Waqas AhmadОценок пока нет
- Baker 1988 PDFДокумент16 страницBaker 1988 PDFJavier E. Guerrero ArrietaОценок пока нет
- Oil and Gas Drilling Methods and TechniquesДокумент4 страницыOil and Gas Drilling Methods and TechniquesSahil VoraОценок пока нет
- Petrophysics of Drilling Fluids - Page - VickersДокумент12 страницPetrophysics of Drilling Fluids - Page - VickersAli Al-MubarakОценок пока нет
- Casing While DrillingДокумент22 страницыCasing While Drillingwulan zaedatusОценок пока нет
- Free Point Indicator PDFДокумент6 страницFree Point Indicator PDFDedipya100% (1)
- 53 - Other Well LogsДокумент26 страниц53 - Other Well Logsrizal tri susiloОценок пока нет
- Chapter 1 - Formation Evaluation - Dr. Adel SalemДокумент26 страницChapter 1 - Formation Evaluation - Dr. Adel Salemnaefmubarak100% (1)
- Oh DSTДокумент30 страницOh DSTWanderererОценок пока нет
- Wireline LoggingДокумент6 страницWireline LoggingMourad HosniОценок пока нет
- Drilling and Workover Division FinalДокумент15 страницDrilling and Workover Division FinalThem Bui XuanОценок пока нет
- ID 163 Horizontal Wells Geosteering and Fluid CharacterizationДокумент5 страницID 163 Horizontal Wells Geosteering and Fluid CharacterizationAYUOB MADIОценок пока нет
- Understanding Source and Reservoir RocksДокумент13 страницUnderstanding Source and Reservoir RocksKhagen DoleyОценок пока нет
- DS-1 Vol. 3 Table 2.1-2.2 Fig. 2.7 To 2.12Документ11 страницDS-1 Vol. 3 Table 2.1-2.2 Fig. 2.7 To 2.12Chandrasekhar Sonar100% (1)
- Experimental Landfill CPT Investigation ReportДокумент19 страницExperimental Landfill CPT Investigation ReportdiogoОценок пока нет
- Lithology Reconstruction from LogsДокумент32 страницыLithology Reconstruction from LogsSyed ShaiqОценок пока нет
- Periscope PsДокумент2 страницыPeriscope PsElseñorsucio CamaradaОценок пока нет
- Drilling Fluids Functions and AdditivesДокумент3 страницыDrilling Fluids Functions and AdditivesRayanne KarinОценок пока нет
- XLOT Recommended PracticeДокумент5 страницXLOT Recommended PracticerashidbashirliveОценок пока нет
- FORMATEMANUAL A5 Crystallization TemperatureДокумент20 страницFORMATEMANUAL A5 Crystallization TemperaturejcОценок пока нет
- LWD IDD Image Derived DensityДокумент10 страницLWD IDD Image Derived DensityRosa K Chang HОценок пока нет
- Rig Inspection - ModuspecДокумент536 страницRig Inspection - Moduspecwideawake.wa91Оценок пока нет
- Depth Issues in The Trajectory (Oil Patch) - Wellbore Position Uncertainty (Ekofisk)Документ101 страницаDepth Issues in The Trajectory (Oil Patch) - Wellbore Position Uncertainty (Ekofisk)Roger GuevaraОценок пока нет
- Logging While DrillingДокумент8 страницLogging While Drillingmay16forhenry4906100% (2)
- Iadc Bits PDFДокумент3 страницыIadc Bits PDFconssu0820Оценок пока нет
- Basic Drilling For WE ADP 2014Документ52 страницыBasic Drilling For WE ADP 2014Nabeel AmeerОценок пока нет
- Depth Control For PerforatingДокумент3 страницыDepth Control For PerforatingDya AliОценок пока нет
- Code Practice For Geotechnical DrillingДокумент43 страницыCode Practice For Geotechnical DrillingQ8123100% (1)
- Racture Pressure: Fracture GradientsДокумент13 страницRacture Pressure: Fracture GradientsPrasanti Plaban DashОценок пока нет
- Solids-Free, High-Density Brines For Packer-Fluid ApplicationsДокумент8 страницSolids-Free, High-Density Brines For Packer-Fluid ApplicationsRicardo FernandezОценок пока нет
- GEOSTEERING CARBONATE RESERVOIRS WITH ADVANCED LWDДокумент10 страницGEOSTEERING CARBONATE RESERVOIRS WITH ADVANCED LWDTom ArnoldОценок пока нет
- Jack-up rig safety during approach and departureДокумент3 страницыJack-up rig safety during approach and departureanhlhОценок пока нет
- Specialized Tools CatalogДокумент60 страницSpecialized Tools CatalogGiorgiana Rosu100% (1)
- International Limited: BOP Bonnet PinДокумент61 страницаInternational Limited: BOP Bonnet PinMichael OkwuwaОценок пока нет
- Logging While Drilling Resistivity LogsДокумент6 страницLogging While Drilling Resistivity LogsMarcos SouzaОценок пока нет
- GeosteeringДокумент4 страницыGeosteeringDwaipayan ChakrabortyОценок пока нет
- Special ProblemsДокумент42 страницыSpecial Problemsdriller22Оценок пока нет
- Drilling Jar Manual for Excellence, Integrity and LeadershipДокумент13 страницDrilling Jar Manual for Excellence, Integrity and Leadershipnjileo100% (1)
- Logging QuestionsДокумент11 страницLogging QuestionsKarim HamdyОценок пока нет
- Chapter 4 - MWD, LWD and Geosteering TechnologiesДокумент57 страницChapter 4 - MWD, LWD and Geosteering TechnologiesHamza HamzaОценок пока нет
- Arabian Drilling Company Rig Specific Procedure AD - 32 Prepare CasingДокумент6 страницArabian Drilling Company Rig Specific Procedure AD - 32 Prepare CasinginfonexusОценок пока нет
- Formation Testing: Supercharge, Pressure Testing, and Contamination ModelsОт EverandFormation Testing: Supercharge, Pressure Testing, and Contamination ModelsОценок пока нет
- Anchor CatenaryДокумент5 страницAnchor CatenaryHood Abdul RazakОценок пока нет
- Standard Work Procedure TempleteДокумент13 страницStandard Work Procedure TempleteHood Abdul RazakОценок пока нет
- PTSC AGSB - Equipment and Personnel (30052011)Документ1 страницаPTSC AGSB - Equipment and Personnel (30052011)Hood Abdul RazakОценок пока нет
- PTSC AGSB - Equipment and Personnel (30052011)Документ1 страницаPTSC AGSB - Equipment and Personnel (30052011)Hood Abdul RazakОценок пока нет
- Ali Haider ResumeДокумент3 страницыAli Haider ResumeHasnain ShakirОценок пока нет
- JU P-Tool Engineering DataДокумент1 страницаJU P-Tool Engineering Dataazze bouzОценок пока нет
- Procedure Installation of Lighting - LABUAN BAJO PDFДокумент6 страницProcedure Installation of Lighting - LABUAN BAJO PDFWika Djoko OОценок пока нет
- Excellent Hex Key Wrench: English VersionДокумент54 страницыExcellent Hex Key Wrench: English Versionmg pyaeОценок пока нет
- GRI 20RS-12-B Data SheetДокумент6 страницGRI 20RS-12-B Data SheetJMAC SupplyОценок пока нет
- WATCHДокумент9 страницWATCHGANTOROОценок пока нет
- Bbraun Infusomat Service MaualДокумент4 страницыBbraun Infusomat Service Maualalfie frankie diezОценок пока нет
- ETN2A ElectromechanicsДокумент64 страницыETN2A ElectromechanicsEinstein's VanderbijlparkОценок пока нет
- 06 HVAC Plumbing PDFДокумент727 страниц06 HVAC Plumbing PDFTamОценок пока нет
- XHLE Long Coupled Centrifugal Pump EnglishДокумент8 страницXHLE Long Coupled Centrifugal Pump Englishgagi1994brahimОценок пока нет
- The Tallest Buildings in The WorldДокумент2 страницыThe Tallest Buildings in The WorldW4G8989Оценок пока нет
- Hino 500S Catalog LR PDFДокумент8 страницHino 500S Catalog LR PDFZulОценок пока нет
- FH400 73158464 Pca-6.140Документ431 страницаFH400 73158464 Pca-6.140IgorGorduz100% (1)
- YCMOU-6th Semester Question Papers-7Документ5 страницYCMOU-6th Semester Question Papers-7phase_shekhar21Оценок пока нет
- Zener DataДокумент2 страницыZener Dataapi-27149887Оценок пока нет
- Cs 180 Notes UCLAДокумент3 страницыCs 180 Notes UCLAnattaq12345Оценок пока нет
- Pressure Vessel Rivets Welded Joints MDSP PrimeДокумент16 страницPressure Vessel Rivets Welded Joints MDSP PrimeIvanОценок пока нет
- ITILДокумент16 страницITILelenviegas82Оценок пока нет
- JUS StandardsДокумент28 страницJUS StandardsgarejkaОценок пока нет
- 1986 Lobel RobinsonДокумент18 страниц1986 Lobel RobinsonNathallia SalvadorОценок пока нет
- Steam System DesignДокумент74 страницыSteam System DesignIshan RanganathОценок пока нет
- Equilibrium of A Particle, The Free-Body Diagram & Coplanar Force SystemsДокумент24 страницыEquilibrium of A Particle, The Free-Body Diagram & Coplanar Force SystemsAtef NazОценок пока нет
- Final ReportДокумент33 страницыFinal ReporttsutsenОценок пока нет
- Interaction & Bank EffectДокумент6 страницInteraction & Bank EffectAkash KandwalОценок пока нет
- Piping Vibration: Causes, Limits & Remedies: Public Courses In-House Courses Operator TrainingДокумент12 страницPiping Vibration: Causes, Limits & Remedies: Public Courses In-House Courses Operator Trainingmember1000100% (1)
- TV Compatibility with Verbatim HDDsДокумент2 страницыTV Compatibility with Verbatim HDDsmirciulicacatyОценок пока нет
- JLG Lighting Tower 6308AN Series II 20150907Документ2 страницыJLG Lighting Tower 6308AN Series II 20150907DwiSulistyo09Оценок пока нет
- Amphenol Musician Range PDFДокумент8 страницAmphenol Musician Range PDFtrc_wmОценок пока нет
- 2009 Energy Storage-U.S. Department of EnergyДокумент380 страниц2009 Energy Storage-U.S. Department of EnergydiwhiteОценок пока нет