Вам также может понравиться
- A Simple PWM Circuit Based On The 555 TimerДокумент5 страницA Simple PWM Circuit Based On The 555 TimerAmit B KolekarОценок пока нет
- PWM Fan 555 Driver W MosfetДокумент3 страницыPWM Fan 555 Driver W Mosfetosbert6quimby100% (1)
- A Simple PWM Circuit Based On The 555 TimerДокумент5 страницA Simple PWM Circuit Based On The 555 TimerKarthik DmОценок пока нет
- A Simple PWM Circuit Based On The 555 TimerДокумент5 страницA Simple PWM Circuit Based On The 555 TimerJoaquim ReisОценок пока нет
- The Pinouts For The 8 Pin DIP Package Are As FollowsДокумент5 страницThe Pinouts For The 8 Pin DIP Package Are As FollowsVerstummeltОценок пока нет
- DC Motor Speed ControlДокумент2 страницыDC Motor Speed ControlarungiriyapurОценок пока нет
- Operational AmplifierДокумент10 страницOperational AmplifierSalman AliОценок пока нет
- 555 Timer 2015Документ29 страниц555 Timer 2015Ansor NtОценок пока нет
- 1 Ic 555Документ6 страниц1 Ic 555Harish PatilОценок пока нет
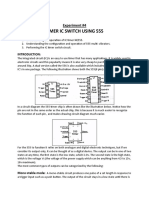
- Timer Ic Switch Using 555: Experiment #4Документ7 страницTimer Ic Switch Using 555: Experiment #4Zeeshan RafiqОценок пока нет
- Ic555 TimerДокумент5 страницIc555 Timerps1976Оценок пока нет
- An Overview of The 555 TimerДокумент25 страницAn Overview of The 555 TimerRakesh MandalОценок пока нет
- Astable Multivibrator Using 555 TimerДокумент22 страницыAstable Multivibrator Using 555 TimerMaryam AsadОценок пока нет
- 555 Timer IC Working PrincipalДокумент6 страниц555 Timer IC Working PrincipalApoorv GargОценок пока нет
- N555e Intergrated CircuitДокумент6 страницN555e Intergrated CircuitGeorge Boman SethОценок пока нет
- 555 Timer ExplainedДокумент27 страниц555 Timer ExplainedThe Lost WolfОценок пока нет
- Timer 555 - ManualДокумент20 страницTimer 555 - ManualXen XeonОценок пока нет
- IC555 Tutorial AvinashJainДокумент4 страницыIC555 Tutorial AvinashJainAvinash Jain100% (1)
- Schmitt Inverter Waveform GeneratorДокумент40 страницSchmitt Inverter Waveform GeneratorsaravananОценок пока нет
- 555 Timer IC-Block Diagram-Working-Pin Out Configuration-Data SheetДокумент13 страниц555 Timer IC-Block Diagram-Working-Pin Out Configuration-Data SheetΔημητριος ΣταθηςОценок пока нет
- E.C.E - 210Документ18 страницE.C.E - 210xxkkassОценок пока нет
- Lab 3 ReportДокумент12 страницLab 3 ReportTanishq VarshneyОценок пока нет
- 555 Timer Integrated CircuitДокумент8 страниц555 Timer Integrated CircuitTalha WaqarОценок пока нет
- Operation - PDF Ation - PDF: 555 Timer - Introduction Cornerstone Electronics Technology and Robotics IIДокумент5 страницOperation - PDF Ation - PDF: 555 Timer - Introduction Cornerstone Electronics Technology and Robotics IILadit KévinОценок пока нет
- List The Features of 555 TimersДокумент3 страницыList The Features of 555 TimersDivyesh DivakarОценок пока нет
- A Brief Description About The Basic Operation of The IC:: NE555 PinoutsДокумент12 страницA Brief Description About The Basic Operation of The IC:: NE555 PinoutsTanishq VarshneyОценок пока нет
- The 555 Timer: Monostable Bistable AstableДокумент10 страницThe 555 Timer: Monostable Bistable AstableSrikanth ThulluriОценок пока нет
- The Important Features of The 555 Timer AreДокумент7 страницThe Important Features of The 555 Timer ArePathella SudhakarОценок пока нет
- Bab 4 - Timer 555 (Update)Документ31 страницаBab 4 - Timer 555 (Update)NUR FATHIAH BINTI ABDUL HALIM STUDENTОценок пока нет
- 6.1 IC555 TIMER: Circuit ComponentsДокумент8 страниц6.1 IC555 TIMER: Circuit ComponentsManish PradhanОценок пока нет
- IC 555 TimerДокумент6 страницIC 555 Timeraditya pandeyОценок пока нет
- Opamp Applicationpart30Документ31 страницаOpamp Applicationpart30KUNTALA DASОценок пока нет
- Burglar Alarm ProjectДокумент4 страницыBurglar Alarm ProjectAvik PathakОценок пока нет
- Operation 555 Timer/OscillatorДокумент7 страницOperation 555 Timer/OscillatoryuvakiraniОценок пока нет
- 555 Timer Monostable OperationДокумент13 страниц555 Timer Monostable OperationGrigore ManОценок пока нет
- 50-555circuits 2 PDFДокумент102 страницы50-555circuits 2 PDFAlfonso RamosОценок пока нет
- UntitledДокумент8 страницUntitledAnand kumar JaishwalОценок пока нет
- SE/NE 555 Timer. It Is Basically A Monolithic Timing Circuit That Produces Accurate and Highly Stable Time Delays orДокумент12 страницSE/NE 555 Timer. It Is Basically A Monolithic Timing Circuit That Produces Accurate and Highly Stable Time Delays orEFraim Manzano FranciscoОценок пока нет
- Ic Applications Lab NewДокумент12 страницIc Applications Lab NewSandy RonaldoОценок пока нет
- 4 555timer 120916082406 Phpapp02Документ14 страниц4 555timer 120916082406 Phpapp02sunil1237Оценок пока нет
- Minor Project On Abcd Parameter of Transmission LineДокумент17 страницMinor Project On Abcd Parameter of Transmission LineUjjawal DarvaikarОценок пока нет
- 3.1555 TIMER:: Schematic SymbolДокумент10 страниц3.1555 TIMER:: Schematic SymbolnagpradasОценок пока нет
- Multivibrator CircuitsДокумент11 страницMultivibrator CircuitsSatyaki ChowdhuryОценок пока нет
- LIC Mod 2Документ15 страницLIC Mod 2Sona PrakashОценок пока нет
- The 555 Timer IC (Adapted From) : CaseДокумент12 страницThe 555 Timer IC (Adapted From) : CaseBiswajit Sarkar100% (1)
- 555 Timer TutorialДокумент12 страниц555 Timer Tutorialrowell ramosОценок пока нет
- Ica WithoutreadingsmanualДокумент90 страницIca WithoutreadingsmanualAhmed Al MansurОценок пока нет
- Creation of A Piano Using A 555 Timer ICДокумент9 страницCreation of A Piano Using A 555 Timer ICPruthvi Trinath100% (1)
- Multivibrador Com Ci 555Документ11 страницMultivibrador Com Ci 555joselito1juniorОценок пока нет
- 555 Timer ICДокумент6 страниц555 Timer ICMahesh HОценок пока нет
- 555 Timer: by D.V.Kamat, Faculty Department of E&C Engg., MITДокумент21 страница555 Timer: by D.V.Kamat, Faculty Department of E&C Engg., MITRupsa SahaОценок пока нет
- 555-Timer Class NotesДокумент1 страница555-Timer Class NotesPraveen KumarОценок пока нет
- Piano ReportДокумент9 страницPiano ReportMaryam TariqОценок пока нет
- 555 TimerДокумент12 страниц555 Timerlalaine reginaldoОценок пока нет
- 555 Timer Operation With Internal CircuitДокумент9 страниц555 Timer Operation With Internal Circuitjanakiram473Оценок пока нет
- UNIT-4 Special Ics The 555 Timer IcДокумент10 страницUNIT-4 Special Ics The 555 Timer IcVerloves LoveОценок пока нет
- TALKING ELECTRONCS 555 Page 3Документ12 страницTALKING ELECTRONCS 555 Page 3Eugene FlexОценок пока нет
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1От EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Рейтинг: 2.5 из 5 звезд2.5/5 (3)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2От EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Оценок пока нет
- Bose 1600VI 1800VI Profesional Service ManualДокумент60 страницBose 1600VI 1800VI Profesional Service ManualSteven100% (2)
- Sony-KDL-50-60-70-R551A-R550A-R555A-R557A-RB1FK CHASSIS-L3Документ50 страницSony-KDL-50-60-70-R551A-R550A-R555A-R557A-RB1FK CHASSIS-L3pasantito67% (3)
- Power Mos V: APT5020BVFRДокумент4 страницыPower Mos V: APT5020BVFRDaniel DorettoОценок пока нет
- PWM Off-Line Switching Regulator Ics: Str-A6000H SeriesДокумент13 страницPWM Off-Line Switching Regulator Ics: Str-A6000H SeriesAnonymous Lfgk6vygОценок пока нет
- 8N65 PDFДокумент8 страниц8N65 PDFJose Luis CanterosОценок пока нет
- Delay and Power Estimation For A Cmos Inverter Driving RC Interconnect LoadsДокумент4 страницыDelay and Power Estimation For A Cmos Inverter Driving RC Interconnect LoadsTarun PrasadОценок пока нет
- CS8N65 A0H: Silicon N-Channel Power MOSFETДокумент10 страницCS8N65 A0H: Silicon N-Channel Power MOSFETVika PutriОценок пока нет
- Dr. Öğr. Üyesi Itır KöymenДокумент8 страницDr. Öğr. Üyesi Itır KöymengörkemОценок пока нет
- Development Testing of X-Band Active Reflect-Array With 137 Mesfet AmplifiersДокумент4 страницыDevelopment Testing of X-Band Active Reflect-Array With 137 Mesfet AmplifiersReddappa ReddyОценок пока нет
- Improved LDMOS For ESD Protection of High Voltage BCD ProcessДокумент4 страницыImproved LDMOS For ESD Protection of High Voltage BCD ProcessNguyen Van ToanОценок пока нет
- Eca Question Bank With TagДокумент13 страницEca Question Bank With TagrppvchОценок пока нет
- Fet01 PDFДокумент16 страницFet01 PDFPierce Denver DayotОценок пока нет
- Electronics Refresher I RF Review Center: CE CCДокумент6 страницElectronics Refresher I RF Review Center: CE CCHary KrizОценок пока нет
- Boost Converter Using Arduino PDFДокумент54 страницыBoost Converter Using Arduino PDFali ghalibОценок пока нет
- Mentor Graphics White PaperДокумент13 страницMentor Graphics White PaperTang LihuaОценок пока нет
- Pure Sine Wave Inverter For House BackupДокумент44 страницыPure Sine Wave Inverter For House BackupKrista Jackson100% (1)
- Unisonic Technologies Co., LTD: 2A, 600V N-Channel Power MosfetДокумент7 страницUnisonic Technologies Co., LTD: 2A, 600V N-Channel Power MosfetАндрей АкимовОценок пока нет
- FycuДокумент4 страницыFycuHemlata SoniОценок пока нет
- FINFETДокумент5 страницFINFETMaliha MouОценок пока нет
- Solid State DevicesДокумент79 страницSolid State Devicesjj0125860% (2)
- Aajfk Sg6859aДокумент13 страницAajfk Sg6859azarevgОценок пока нет
- Motor Driver PDFДокумент96 страницMotor Driver PDFMario Eduardo Ponce Gomez100% (1)
- LAW 420 LAW 520: Service ManualДокумент46 страницLAW 420 LAW 520: Service ManualquangppОценок пока нет
- MOS Transistor Principle: Unit-1Документ111 страницMOS Transistor Principle: Unit-1moorthiapecОценок пока нет
- MosfetДокумент15 страницMosfetRamsha TariqОценок пока нет
- AF4920NДокумент6 страницAF4920NJuan CoronelОценок пока нет
- ZXGD3003E6 5A (Peak) Gate Driver in SOT23-6: General DescriptionДокумент8 страницZXGD3003E6 5A (Peak) Gate Driver in SOT23-6: General DescriptionGawanimyd MydОценок пока нет
- Analog Layout DesignДокумент244 страницыAnalog Layout DesignAgnathavasi100% (5)
- Invertor LCD MP1018Документ1 страницаInvertor LCD MP1018RenatoMaiaОценок пока нет
- SW4N65K2: N-Channel Enhanced Mode TO-220F/TO-251N/TO-252 MOSFETДокумент6 страницSW4N65K2: N-Channel Enhanced Mode TO-220F/TO-251N/TO-252 MOSFETEliecer MenesesОценок пока нет