Вам также может понравиться
- Pulse Width Modulation: - More Work - Less WasteДокумент15 страницPulse Width Modulation: - More Work - Less Wastedot11Оценок пока нет
- Ac Cathode FollowerДокумент6 страницAc Cathode FollowerPeter SilanganОценок пока нет
- Error Amplifier Design and ApplicationsДокумент6 страницError Amplifier Design and ApplicationsGhulam Abbas100% (1)
- The Valve Wizard: How To Design Valve Guitar Amplifiers!Документ3 страницыThe Valve Wizard: How To Design Valve Guitar Amplifiers!Diego García Medina100% (1)
- Gyrators To Replace PSU ChokesДокумент3 страницыGyrators To Replace PSU Chokeschuongdv100% (2)
- 24V Battery Charger With SCRДокумент8 страниц24V Battery Charger With SCRluisОценок пока нет
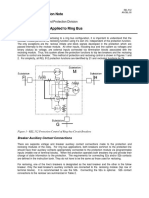
- Ring Bus Reclosing 20121217112215906Документ6 страницRing Bus Reclosing 20121217112215906Rick JordanОценок пока нет
- Virtual Ground Circuits: How to Split a Single SupplyДокумент11 страницVirtual Ground Circuits: How to Split a Single SupplytekellamerZ aka tekellamerОценок пока нет
- How An Smps Works: Rectifier StageДокумент7 страницHow An Smps Works: Rectifier StageImran AshrafОценок пока нет
- Capacitor, Reed Relay & Reed SwitchДокумент5 страницCapacitor, Reed Relay & Reed SwitchCt HajarОценок пока нет
- NVA100X-Getting Started-01-2018Документ28 страницNVA100X-Getting Started-01-2018Rogerio JrОценок пока нет
- The Basic Principles of Effective Ceiling Loudspeaker InstallationДокумент3 страницыThe Basic Principles of Effective Ceiling Loudspeaker Installationjanaisha_bai7170Оценок пока нет
- Banasthali University: (Programmable Logiccontroller)Документ21 страницаBanasthali University: (Programmable Logiccontroller)goblockuОценок пока нет
- Virtual Ground CircuitsДокумент11 страницVirtual Ground CircuitsRahul DevaОценок пока нет
- Ag2015-20 20150511Документ10 страницAg2015-20 20150511sikander843562Оценок пока нет
- Analysis and Application of Scott ConnectionДокумент11 страницAnalysis and Application of Scott ConnectionRam Uday MandalОценок пока нет
- The Breaker Failure Protection BFP Schemes in UtilitiesДокумент9 страницThe Breaker Failure Protection BFP Schemes in UtilitiesTrigras Bangun PerkasaОценок пока нет
- MiCOM P543to546 PDFДокумент824 страницыMiCOM P543to546 PDFNagu BandaruОценок пока нет
- NV11B Manual 01 2015Документ205 страницNV11B Manual 01 2015nknfiveОценок пока нет
- Measuring Leakage InductanceДокумент8 страницMeasuring Leakage Inductancejazbo8Оценок пока нет
- PCB Relay G5laДокумент4 страницыPCB Relay G5laRamón ColónОценок пока нет
- DC MOTORS AND GENERATORS: TERMINAL CHARACTERISTICS AND SPEED CONTROLДокумент15 страницDC MOTORS AND GENERATORS: TERMINAL CHARACTERISTICS AND SPEED CONTROLptarwatkar123Оценок пока нет
- Power Factor Improvement Using UpfcДокумент16 страницPower Factor Improvement Using UpfcUday Wankar50% (2)
- Site Inspection and Test Record: 1. General Data and InformationДокумент5 страницSite Inspection and Test Record: 1. General Data and InformationSohail AhmedОценок пока нет
- Regulation of 3 Phase Alternator MethodsДокумент12 страницRegulation of 3 Phase Alternator Methodsvish5936Оценок пока нет
- Electrical Machines-IIДокумент137 страницElectrical Machines-IIgnathbl100% (1)
- Bi-Amplified Studio Reference Monitor: Quick Start Owner's ManualДокумент82 страницыBi-Amplified Studio Reference Monitor: Quick Start Owner's ManualhugocomunicaОценок пока нет
- ETSD Emergency Traction Slowdown Installation and Operation InstructionsДокумент1 страницаETSD Emergency Traction Slowdown Installation and Operation InstructionsfreddyjoertyОценок пока нет
- TAPCON® 250 Technical OverviewДокумент8 страницTAPCON® 250 Technical OverviewGANG WANGОценок пока нет
- Valve Curve TracerДокумент7 страницValve Curve TracerIsa Campos100% (1)
- MMLG 01-02-03 - 04 Manual GBДокумент8 страницMMLG 01-02-03 - 04 Manual GBethan625Оценок пока нет
- THYRISTORДокумент26 страницTHYRISTORLovely Jaze SalgadoОценок пока нет
- Speaker Power DistanceДокумент6 страницSpeaker Power DistanceWilnordave NemeñoОценок пока нет
- Alfanar Co.: Respon Sibilities Legend CSDДокумент4 страницыAlfanar Co.: Respon Sibilities Legend CSDjayabalОценок пока нет
- "Sound Innovation, On Call": EMS5 Call Director Easy Set-Up InstructionsДокумент19 страниц"Sound Innovation, On Call": EMS5 Call Director Easy Set-Up Instructionswayne mcmurrayОценок пока нет
- Sie91093-T1000 PlusДокумент37 страницSie91093-T1000 PlusRoyyan Hasmi FadhillahОценок пока нет
- Minor Project On Abcd Parameter of Transmission LineДокумент17 страницMinor Project On Abcd Parameter of Transmission LineUjjawal DarvaikarОценок пока нет
- Gel Cell Charger, I: Parts ListДокумент11 страницGel Cell Charger, I: Parts ListsundeepgjОценок пока нет
- HKD GДокумент2 страницыHKD GSaluka KulathungaОценок пока нет
- Latching Assignment PLC Ladder LogicДокумент4 страницыLatching Assignment PLC Ladder LogicsalonyОценок пока нет
- Start-Up Guide of LSLV-M100: Download ManualДокумент8 страницStart-Up Guide of LSLV-M100: Download ManualArief FibonacciОценок пока нет
- Causes and statistics of power substation protection system misoperationsДокумент6 страницCauses and statistics of power substation protection system misoperationsOscar GarciaОценок пока нет
- Nepal hydropower generator protection relay specificationsДокумент5 страницNepal hydropower generator protection relay specificationsPritam SinghОценок пока нет
- The Linearly Variable Differential Transformer (LVDT)Документ13 страницThe Linearly Variable Differential Transformer (LVDT)SagarОценок пока нет
- Chapter 4 Speed Control of IMДокумент49 страницChapter 4 Speed Control of IMMarco SamehОценок пока нет
- Vector Shift and ROCOF AДокумент2 страницыVector Shift and ROCOF AmodantoОценок пока нет
- Seminar On: (Programmable Logic Controller)Документ21 страницаSeminar On: (Programmable Logic Controller)balajigururajОценок пока нет
- Field Inspection and Test Record Transformer Protection Relay TestДокумент30 страницField Inspection and Test Record Transformer Protection Relay TestSantiparp BoonsoongОценок пока нет
- Power ElectronicsДокумент45 страницPower ElectronicsMudit Prabhakar100% (2)
- Bus Tie For 415v MCCДокумент5 страницBus Tie For 415v MCCwaleedОценок пока нет
- Switched Reluctance MotorДокумент75 страницSwitched Reluctance Motor15BEE1120 ISHAV SHARDAОценок пока нет
- Fundamentals of Bus Bar ProtectionДокумент92 страницыFundamentals of Bus Bar ProtectionNorng VibolОценок пока нет
- Function TCS7 PA30Документ7 страницFunction TCS7 PA30Nasser Abdel RaoufОценок пока нет
- IGBT NoteДокумент3 страницыIGBT NoteBheshОценок пока нет
- Self Oscillating Flyback ConverterДокумент7 страницSelf Oscillating Flyback ConverterNaren DranОценок пока нет
- 20WДокумент3 страницы20WvladareanucatalindanОценок пока нет
- Capacitance Multiplier Power Supply FilterДокумент10 страницCapacitance Multiplier Power Supply FilterBiju jpОценок пока нет
- High Power High Efficiency Buck Converter Circuit Using TL494Документ15 страницHigh Power High Efficiency Buck Converter Circuit Using TL494Koushik Maity100% (1)
- Study and Design, Simulation of PWM Based Buck Converter For Low Power ApplicationДокумент17 страницStudy and Design, Simulation of PWM Based Buck Converter For Low Power ApplicationIOSRjournalОценок пока нет
- Elec SMPS2Документ4 страницыElec SMPS2Victor D'souzaОценок пока нет
- Lesson Plan Form CSUDH Teacher Education DepartmentДокумент5 страницLesson Plan Form CSUDH Teacher Education Departmentapi-284817223Оценок пока нет
- Exit Exam Prep Guide PDFДокумент31 страницаExit Exam Prep Guide PDFUma Maheswari100% (2)
- Copyright and license information for The Closure LibraryДокумент2 страницыCopyright and license information for The Closure Libraryjuan TwocockОценок пока нет
- Reading Words With Numbers Reflection PaperДокумент1 страницаReading Words With Numbers Reflection PaperMay MoralesОценок пока нет
- 111/Llllllhhllllllhlll: The of Pseudo-GeberДокумент415 страниц111/Llllllhhllllllhlll: The of Pseudo-GeberНикола НаковОценок пока нет
- Essential survival planning and kit preparationДокумент4 страницыEssential survival planning and kit preparationLuis Correcaminos OrtizОценок пока нет
- Peer Assisted Learning Strategies Program OverviewДокумент34 страницыPeer Assisted Learning Strategies Program OverviewVincent BayonaОценок пока нет
- Religion - EncartaДокумент11 страницReligion - EncartaSheriff SammyОценок пока нет
- Sophie's Fantasies About Meeting Soccer Star Danny CaseyДокумент18 страницSophie's Fantasies About Meeting Soccer Star Danny Caseydragon draksterОценок пока нет
- BWM - 2014 - Band6 (Reconstruction and The Historic City Rome and Abroad - An Interdisciplinary Approach)Документ289 страницBWM - 2014 - Band6 (Reconstruction and The Historic City Rome and Abroad - An Interdisciplinary Approach)ebjlОценок пока нет
- Tooth ExtractionДокумент9 страницTooth ExtractionChandraPrakaash100% (2)
- Philippine Folk Dances - SdnameДокумент5 страницPhilippine Folk Dances - Sdnameeds100% (22)
- Advanced Business Mathematics and Statistics For EntrepreneursДокумент262 страницыAdvanced Business Mathematics and Statistics For EntrepreneursKNOWLEDGE CREATORS100% (4)
- Can Forgiveness Play A Role in Criminal Justice?Документ18 страницCan Forgiveness Play A Role in Criminal Justice?claratgreenОценок пока нет
- SBC Calcuation of Square FoundaionДокумент4 страницыSBC Calcuation of Square FoundaionManan ParikhОценок пока нет
- Review of Sepet (2015) Exploring Social CategoriesДокумент2 страницыReview of Sepet (2015) Exploring Social CategoriesMc VinothОценок пока нет
- Royal Family Tree Complete WebsiteДокумент6 страницRoyal Family Tree Complete Websiteapi-284485484100% (1)
- Trigonometric Ratios & Identities: Compound AnglesДокумент44 страницыTrigonometric Ratios & Identities: Compound AnglesTanvir ShafalОценок пока нет
- Credit Transactions Digests (Mutuum)Документ6 страницCredit Transactions Digests (Mutuum)Stan AileronОценок пока нет
- Come To Jesus - ChartДокумент1 страницаCome To Jesus - ChartLaura Iova VioletaОценок пока нет
- Who Is A MuslimДокумент3 страницыWho Is A Muslimmihir khannaОценок пока нет
- 72 - Lim v. Felix, 194 SCRA 292Документ5 страниц72 - Lim v. Felix, 194 SCRA 292gerlie22Оценок пока нет
- A Negro Speaks of Rivers symbolism handoutДокумент3 страницыA Negro Speaks of Rivers symbolism handoutCaleb BargerОценок пока нет
- IELTS Speaking Help SampleДокумент3 страницыIELTS Speaking Help SamplePhuong MaiОценок пока нет
- Bibliography - The Leitmotif in American Sound Film MusicДокумент14 страницBibliography - The Leitmotif in American Sound Film MusicTravis JonesОценок пока нет
- SOLAR LIGHT POLE FOUNDATION DESIGNДокумент44 страницыSOLAR LIGHT POLE FOUNDATION DESIGNJason Secret100% (2)
- Boldenone UndДокумент2 страницыBoldenone UndAhmedОценок пока нет
- Eleanor and Park LitChartДокумент67 страницEleanor and Park LitChartbyassenathalieОценок пока нет
- OEC Commerce UG PDFДокумент5 страницOEC Commerce UG PDFPavan Kalyn0% (1)
- Postal Assistant Exam Model Questions and AnswersДокумент2 страницыPostal Assistant Exam Model Questions and Answersrajesh kannanОценок пока нет