Вам также может понравиться
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Plants Life Cycles and PartsДокумент5 страницPlants Life Cycles and PartsseemaОценок пока нет
- MR15 Mechanical Engineering SyllabusДокумент217 страницMR15 Mechanical Engineering Syllabusramji_kkpОценок пока нет
- Fabm2 q2 Module 4 TaxationДокумент17 страницFabm2 q2 Module 4 TaxationLady HaraОценок пока нет
- Gas Chromatography - COLIN F. POOLE 2012 PDFДокумент743 страницыGas Chromatography - COLIN F. POOLE 2012 PDFVo Manh Tien100% (1)
- Sci7 Q1 Wk-5 Module-5Документ15 страницSci7 Q1 Wk-5 Module-5Lester Noel RosalesОценок пока нет
- Diferencias Gas LP y Gas Natural: Adminigas, S.A. de C.VДокумент2 страницыDiferencias Gas LP y Gas Natural: Adminigas, S.A. de C.VMarco Antonio Zelada HurtadoОценок пока нет
- Product Data: T T 13 SEER Single - Packaged Heat Pump R (R - 410A) RefrigerantДокумент36 страницProduct Data: T T 13 SEER Single - Packaged Heat Pump R (R - 410A) RefrigerantJesus CantuОценок пока нет
- Roll Covering Letter LathiaДокумент6 страницRoll Covering Letter LathiaPankaj PandeyОценок пока нет
- Earth and Beyond PDFДокумент5 страницEarth and Beyond PDFNithyananda Prabhu100% (1)
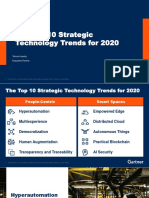
- The Top 10 Strategic Technology Trends For 2020: Tomas Huseby Executive PartnerДокумент31 страницаThe Top 10 Strategic Technology Trends For 2020: Tomas Huseby Executive PartnerCarlos Stuars Echeandia CastilloОценок пока нет
- Location: Connectivity To The MuseumДокумент7 страницLocation: Connectivity To The MuseumAbhishek AjayОценок пока нет
- AWK and SED Command Examples in LinuxДокумент2 страницыAWK and SED Command Examples in Linuximranpathan22Оценок пока нет
- Marketing of Agriculture InputsДокумент18 страницMarketing of Agriculture InputsChanakyaОценок пока нет
- Siemens MS 42.0 Engine Control System GuideДокумент56 страницSiemens MS 42.0 Engine Control System GuideIbnu NugroОценок пока нет
- ROM Magazine V1i6Документ64 страницыROM Magazine V1i6Mao AriasОценок пока нет
- Gujarat Technological University: Aeronautical EngineeringДокумент16 страницGujarat Technological University: Aeronautical EngineeringumodiОценок пока нет
- Chapter 2 Literature ReviewДокумент10 страницChapter 2 Literature ReviewSharan BvpОценок пока нет
- Speech TravellingДокумент4 страницыSpeech Travellingshafidah ZainiОценок пока нет
- Ejemplo FFT Con ArduinoДокумент2 страницыEjemplo FFT Con ArduinoAns Shel Cardenas YllanesОценок пока нет
- Thinking and Acting Outside The BoxДокумент36 страницThinking and Acting Outside The BoxMariecris GatlabayanОценок пока нет
- VFD ManualДокумент187 страницVFD ManualgpradiptaОценок пока нет
- Export - Import Cycle - PPSXДокумент15 страницExport - Import Cycle - PPSXMohammed IkramaliОценок пока нет
- Lay Out New PL Press QltyДокумент68 страницLay Out New PL Press QltyDadan Hendra KurniawanОценок пока нет
- AP World History: Islamic Empires and Scientific AdvancementДокумент55 страницAP World History: Islamic Empires and Scientific AdvancementJa'TasiaОценок пока нет
- Mono - Probiotics - English MONOGRAFIA HEALTH CANADA - 0Документ25 страницMono - Probiotics - English MONOGRAFIA HEALTH CANADA - 0Farhan aliОценок пока нет
- JTIL Purchase Requisition for Plasma Machine SparesДокумент3 страницыJTIL Purchase Requisition for Plasma Machine Sparesshivam soniОценок пока нет
- Assignment 2: Lesson Plan Analysis, Revision and Justification - Kaitlin Rose TrojkoДокумент9 страницAssignment 2: Lesson Plan Analysis, Revision and Justification - Kaitlin Rose Trojkoapi-408336810Оценок пока нет
- Data Validation and Verification - BBC BitsizeДокумент56 страницData Validation and Verification - BBC BitsizeluciferothegoatОценок пока нет
- Minimum Fees To Be Taken by CAДокумент8 страницMinimum Fees To Be Taken by CACA Sanjay BhatiaОценок пока нет
- Abend CodesДокумент8 страницAbend Codesapi-27095622100% (1)