Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Especificaciones de Torque Motor Toyota 1GR-FEДокумент3 страницыEspecificaciones de Torque Motor Toyota 1GR-FEJose L Ramirez100% (1)
- JCB JS145W+JS160WTechnical DataДокумент36 страницJCB JS145W+JS160WTechnical DataMoataz SamiОценок пока нет
- Hydraulic System Trainer AS-10Документ13 страницHydraulic System Trainer AS-10Tanlets Gery100% (1)
- Valtra T121-T191 EngineДокумент29 страницValtra T121-T191 EngineJakaОценок пока нет
- Hydrolic Breaking SystemДокумент56 страницHydrolic Breaking SystemAnkush JainОценок пока нет
- Aircycle 5.1 - Heat Recovery UnitДокумент2 страницыAircycle 5.1 - Heat Recovery UnitValentin MalihinОценок пока нет
- Hydraulics1 Lec 3Документ40 страницHydraulics1 Lec 3calebjohnf0512Оценок пока нет
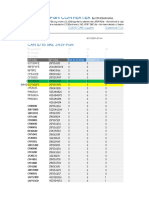
- Can Id To Sae J1939 PGNДокумент171 страницаCan Id To Sae J1939 PGNdiana aragon100% (1)
- Iso 14801 2016Документ11 страницIso 14801 2016robonrobertorrsОценок пока нет
- Broad X User Manual 0814 Revised PDFДокумент64 страницыBroad X User Manual 0814 Revised PDFs7ukОценок пока нет
- MTRL MasterДокумент386 страницMTRL MasterSourav MaitraОценок пока нет
- Bearing CatalogueДокумент15 страницBearing CatalogueDinesh sirviОценок пока нет
- Nouvelle Brochure BTTДокумент28 страницNouvelle Brochure BTTskirubananthОценок пока нет
- 100 PSV 001 AZ Safety Pressure Valve (Design)Документ2 страницы100 PSV 001 AZ Safety Pressure Valve (Design)magdy salehОценок пока нет
- TroubleshootingДокумент24 страницыTroubleshootingAamer Khawaja100% (1)
- Materijali I Konstrukcije Materials and Structures: GRA ĐevinskiДокумент204 страницыMaterijali I Konstrukcije Materials and Structures: GRA ĐevinskiAnonymous FJG4UKm5HОценок пока нет
- Aerio 2005Документ225 страницAerio 2005Oscar Andres Berrocal ROjasОценок пока нет
- Montacargas GP 25Документ496 страницMontacargas GP 25Jose Andres100% (2)
- Structural Steel DesignДокумент32 страницыStructural Steel Designshaluka100% (1)
- 1327 751 102b - AS-Tronic Truck & Bus Repair Manual (10-, 12 - and 16-Speed Version Without ZF-Intarder Repair Level 3)Документ122 страницы1327 751 102b - AS-Tronic Truck & Bus Repair Manual (10-, 12 - and 16-Speed Version Without ZF-Intarder Repair Level 3)Сергей Миненко100% (8)
- Is 1786Документ5 страницIs 1786Jeevan ShendreОценок пока нет
- Vessel Foundation 1 CalcДокумент7 страницVessel Foundation 1 CalcmakcodetechОценок пока нет
- 15P701Документ4 страницы15P701rajakrishnanОценок пока нет
- Horn Sea Wind Farm 02 Offshore Substation Cooling Pipe & Instrumentation Diagrams (P&Id) All DecksДокумент6 страницHorn Sea Wind Farm 02 Offshore Substation Cooling Pipe & Instrumentation Diagrams (P&Id) All DeckskristianОценок пока нет
- MD Lecture 3 4 PDFДокумент35 страницMD Lecture 3 4 PDFDeekshaomarОценок пока нет
- Installation Instructions: MazdaДокумент3 страницыInstallation Instructions: MazdaMickael FernánОценок пока нет
- Jis G3141Документ0 страницJis G3141johnnyquest_86Оценок пока нет
- Mechanical SealДокумент16 страницMechanical SealRAJEDIA ABDULLAHОценок пока нет