Вам также может понравиться
- Banachek UnlimitedДокумент34 страницыBanachek UnlimitedserenaОценок пока нет
- Binet Kamat Test For General Mental AbilitiesДокумент54 страницыBinet Kamat Test For General Mental AbilitiesSana Siddiq100% (14)
- The Dry Bulk Management StandardДокумент18 страницThe Dry Bulk Management Standardamu_more44100% (1)
- 40 RT-flex Control-System Rev01Документ68 страниц40 RT-flex Control-System Rev01Mayvon Botelho100% (2)
- Adaptive Prediction Model Accuracy in The Control of Residential Energy ResourcesДокумент6 страницAdaptive Prediction Model Accuracy in The Control of Residential Energy ResourcesMario SammyОценок пока нет
- Factors Affecting Physical FitnessДокумент7 страницFactors Affecting Physical FitnessMary Joy Escanillas Gallardo100% (2)
- Igcse Revision BookДокумент23 страницыIgcse Revision BookJo Patrick100% (2)
- Donna Hay Magazine 2014-10-11 PDFДокумент172 страницыDonna Hay Magazine 2014-10-11 PDFlekovic_tanjaОценок пока нет
- Fluent 14.5 TutorialДокумент1 146 страницFluent 14.5 TutorialBruno Morabito100% (2)
- Intumescent Paint For Steel NZ - Coating - Co.nzДокумент8 страницIntumescent Paint For Steel NZ - Coating - Co.nzPeter ThomsonОценок пока нет
- Design and Implementation of Energy Management System With Fuzzy Control For DC Microgrid SystemsДокумент8 страницDesign and Implementation of Energy Management System With Fuzzy Control For DC Microgrid Systemsjaackson10Оценок пока нет
- François de Chateaubriand Mémoires D'outre-TombeДокумент1 819 страницFrançois de Chateaubriand Mémoires D'outre-TombepantoleОценок пока нет
- Pharmd CurriculumДокумент18 страницPharmd Curriculum5377773Оценок пока нет
- DCS YokogawaДокумент17 страницDCS Yokogawasswahyudi100% (1)
- Journal Paper ODzoboДокумент27 страницJournal Paper ODzoboodzoboОценок пока нет
- Thang2018 Article OptimalOperationOfEnergyHubInCДокумент12 страницThang2018 Article OptimalOperationOfEnergyHubInCHeri Tamtowi SyaputroОценок пока нет
- Optimization of Renewable Energy Efficiency Using Homer: Kenneth E. Okedu, Roland UhunmwanghoДокумент7 страницOptimization of Renewable Energy Efficiency Using Homer: Kenneth E. Okedu, Roland Uhunmwanghokaybecbe_indОценок пока нет
- Smart Heating and Air Conditioning Scheduling Method Incorporating Customer Convenience For Home Energy Management SystemДокумент7 страницSmart Heating and Air Conditioning Scheduling Method Incorporating Customer Convenience For Home Energy Management Systemsulthan_81Оценок пока нет
- IEEE Economic DispatchДокумент10 страницIEEE Economic Dispatchتبارك النوريОценок пока нет
- A Comprehesnive Dynamic Modeling of Grid Connected Hybrid Renewable Power Generation and Storage SystemДокумент4 страницыA Comprehesnive Dynamic Modeling of Grid Connected Hybrid Renewable Power Generation and Storage SystemChandar SinghОценок пока нет
- Scientific Paper Title3Документ8 страницScientific Paper Title3mohammedagag18Оценок пока нет
- Economic Dispatch For A Microgrid Considering Renewable Energy Cost FunctionsДокумент7 страницEconomic Dispatch For A Microgrid Considering Renewable Energy Cost FunctionsibtihalislamОценок пока нет
- Multi Energy System Modelling and Operation Optimisation For University Research FacilityДокумент6 страницMulti Energy System Modelling and Operation Optimisation For University Research FacilityJOSE DANIEL SANTACRUZ LONDONOОценок пока нет
- Optimal Operation Strategy of Multi-Energy Complementary Distributed CCHP System and Its Application On Commercial BuildingДокумент11 страницOptimal Operation Strategy of Multi-Energy Complementary Distributed CCHP System and Its Application On Commercial BuildingEko PrasetyoОценок пока нет
- (Leido N.I) Hybrid Modeling of Central Receiver Solar Power PlantsДокумент16 страниц(Leido N.I) Hybrid Modeling of Central Receiver Solar Power PlantsChristian Figueroa ValenciaОценок пока нет
- Optimization of Hybrid Micro-Cchp Systems in The Day-Ahead Electricity MarketДокумент11 страницOptimization of Hybrid Micro-Cchp Systems in The Day-Ahead Electricity MarketadrianunteaОценок пока нет
- Exergy Cost Analysis of A Coal Fired Power Plant Based On Structural Theory of ThermoeconomicsДокумент27 страницExergy Cost Analysis of A Coal Fired Power Plant Based On Structural Theory of ThermoeconomicsIgnacio MoscosoОценок пока нет
- Sizing of Residential CHP Systems: Energy and BuildingsДокумент11 страницSizing of Residential CHP Systems: Energy and BuildingsMaxim MendelОценок пока нет
- Power Management and Power Flow Control of The Microgrid Connected PV-FC Hybrid System Ieee PaperДокумент4 страницыPower Management and Power Flow Control of The Microgrid Connected PV-FC Hybrid System Ieee PaperYogendra Reddy100% (1)
- International Journal of EngineeringДокумент10 страницInternational Journal of EngineeringHotib PerwiraОценок пока нет
- Cogeneration Power PlantДокумент5 страницCogeneration Power PlantVT WyeeОценок пока нет
- Review of Related Literature: 2.1.1 Indoor Light Energy HarvestingДокумент14 страницReview of Related Literature: 2.1.1 Indoor Light Energy HarvestingGillian AmbaОценок пока нет
- Exergo-Economic Analysis of A Typical Wind Power SystemДокумент36 страницExergo-Economic Analysis of A Typical Wind Power SystemHammad PervezОценок пока нет
- Energies: Internal Combustion Engine Model For Combined Heat and Power (CHP) Systems DesignДокумент14 страницEnergies: Internal Combustion Engine Model For Combined Heat and Power (CHP) Systems DesignSaadKianiОценок пока нет
- Distributed Predictive Control For Energy Hub Coordination in Coupled Electricity and Gas NetworksДокумент42 страницыDistributed Predictive Control For Energy Hub Coordination in Coupled Electricity and Gas NetworksAntonio MartinsОценок пока нет
- Afzali2017 PDFДокумент53 страницыAfzali2017 PDFkrishna maniОценок пока нет
- Thesis On Wind Power GenerationДокумент7 страницThesis On Wind Power Generationbsqfc4d5100% (2)
- 16Документ18 страниц16Elzimar FreitasОценок пока нет
- ProposalДокумент8 страницProposalMontaser KassemОценок пока нет
- Sensors: Power Factor Compensation Using Teaching Learning Based Optimization and Monitoring System by Cloud Data LoggerДокумент23 страницыSensors: Power Factor Compensation Using Teaching Learning Based Optimization and Monitoring System by Cloud Data LoggerDungОценок пока нет
- A.Lokesh, V.Sreenivasulu Ii-.Btech, Eee, Aits, Rajampeta AbstractДокумент11 страницA.Lokesh, V.Sreenivasulu Ii-.Btech, Eee, Aits, Rajampeta AbstractSubbu SuniОценок пока нет
- Power Management of A Stand-Alone Wind/Photovoltaic/Fuel Cell Energy SystemДокумент11 страницPower Management of A Stand-Alone Wind/Photovoltaic/Fuel Cell Energy SystemAzza AhmedОценок пока нет
- Optimization of Storage Devices For Regenerative Braking Energy in Subway SystemsДокумент6 страницOptimization of Storage Devices For Regenerative Braking Energy in Subway SystemssunitharajababuОценок пока нет
- Energies 12 02058 PDFДокумент24 страницыEnergies 12 02058 PDFchaudharymeelОценок пока нет
- Investigation of Model Predictive Control For Fifth Generation District Heating and Cooling (5GDHC) SubstationsДокумент11 страницInvestigation of Model Predictive Control For Fifth Generation District Heating and Cooling (5GDHC) SubstationsSimone BuffaОценок пока нет
- A Generalized Power System Architexture - Sadey - AIAA - 2018Документ12 страницA Generalized Power System Architexture - Sadey - AIAA - 2018Tavi GrigОценок пока нет
- 323 16 AsensioДокумент6 страниц323 16 AsensioTxisko AsensioОценок пока нет
- Computer Aided Optimal Sizing of Hybrid Photovoltaic Wind System For Rural Electrification in IndiaДокумент11 страницComputer Aided Optimal Sizing of Hybrid Photovoltaic Wind System For Rural Electrification in IndiaIJERDОценок пока нет
- Minimizing Building Electricity Costs in A Dynamic Power Market: Algorithms and Impact On Energy ConservationДокумент11 страницMinimizing Building Electricity Costs in A Dynamic Power Market: Algorithms and Impact On Energy ConservationRene Daniel Rolon FleitasОценок пока нет
- EnergyPLAN DocumentationДокумент62 страницыEnergyPLAN DocumentationSboОценок пока нет
- Fuzzy Based Ev Charging With Reduced Power Fluctuation Under Renewable Power Consumption ConstraintДокумент16 страницFuzzy Based Ev Charging With Reduced Power Fluctuation Under Renewable Power Consumption ConstraintkesavantОценок пока нет
- Analysis and Optimization of The Use of CHP-ORC Systems For SmallДокумент8 страницAnalysis and Optimization of The Use of CHP-ORC Systems For SmallHamtaro Ham HamОценок пока нет
- Smart GridДокумент6 страницSmart GridFrank Alexander PerezОценок пока нет
- Design and Optimization of District Energy SystemsДокумент6 страницDesign and Optimization of District Energy Systemsduplicado2012Оценок пока нет
- Power Generation Schedule For Economical Aspects Using Evolutionary TechniqueДокумент3 страницыPower Generation Schedule For Economical Aspects Using Evolutionary TechniqueInternational Journal of Application or Innovation in Engineering & ManagementОценок пока нет
- Quantum in EnergyДокумент34 страницыQuantum in EnergyCan of BeansОценок пока нет
- Methodsx: Method ArticleДокумент12 страницMethodsx: Method ArticleTejaswinee DarureОценок пока нет
- Energies: A Review of The Integrated Design and Control of Electrified VehiclesДокумент31 страницаEnergies: A Review of The Integrated Design and Control of Electrified Vehiclesdjamel1306Оценок пока нет
- Hybrid Power Systems ThesisДокумент8 страницHybrid Power Systems ThesisCarmen Pell100% (1)
- Applied Energy: Kyung Tae Yun, Heejin Cho, Rogelio Luck, Pedro J. MagoДокумент9 страницApplied Energy: Kyung Tae Yun, Heejin Cho, Rogelio Luck, Pedro J. MagoJoel ParrОценок пока нет
- Two Control Energy Management Schemes For Electrical Hybrid VehicleДокумент6 страницTwo Control Energy Management Schemes For Electrical Hybrid VehicleJorge Luis AndersonОценок пока нет
- A Study Regarding The Performances of Trigeneration SystemsДокумент6 страницA Study Regarding The Performances of Trigeneration SystemstfemilianОценок пока нет
- Hybrid Energy Systems ThesisДокумент8 страницHybrid Energy Systems Thesislaurenbarkeringlewood100% (2)
- Neuro-Fuzzy Controller For Gas Turbine in Biomass-Based Electric Power PlantДокумент13 страницNeuro-Fuzzy Controller For Gas Turbine in Biomass-Based Electric Power Plantmbg2012Оценок пока нет
- Electrodynamical Modelling of Bidirectional Fuel Cell Systems For HIL Simulations of Combined Grid SystemsДокумент6 страницElectrodynamical Modelling of Bidirectional Fuel Cell Systems For HIL Simulations of Combined Grid SystemsSIMIŞKACIОценок пока нет
- Internal Combustion Engine Model For Combined Heat and Power (CHP) Systems DesignДокумент14 страницInternal Combustion Engine Model For Combined Heat and Power (CHP) Systems DesignPeter StanleyОценок пока нет
- COMBINED FINANCIAL AND ENVIRONMENTAL OPTIMIZATION OF A Trigeneration SystemДокумент13 страницCOMBINED FINANCIAL AND ENVIRONMENTAL OPTIMIZATION OF A Trigeneration SystemAlvaro Antonio Ochoa VillaОценок пока нет
- Economic Analysis, Modeling and Simulation of Photovoltaic Fuel Cell Hybrid Renewable Electric System For Smart Grid Distributed Generation SystemДокумент8 страницEconomic Analysis, Modeling and Simulation of Photovoltaic Fuel Cell Hybrid Renewable Electric System For Smart Grid Distributed Generation SystemIAEME PublicationОценок пока нет
- Combined Heat and PowerДокумент31 страницаCombined Heat and PowerMaroudasLeonidasОценок пока нет
- Optimal Scheduling of Cascaded Hydrothermal Systems Using A New Improved Particle Swarm Optimization TechniqueДокумент11 страницOptimal Scheduling of Cascaded Hydrothermal Systems Using A New Improved Particle Swarm Optimization TechniqueSujoy DasОценок пока нет
- Combined Cooling, Heating, and Power Systems: Modeling, Optimization, and OperationОт EverandCombined Cooling, Heating, and Power Systems: Modeling, Optimization, and OperationОценок пока нет
- Energy and Thermal Management, Air-Conditioning, and Waste Heat Utilization: 2nd ETA Conference, November 22-23, 2018, Berlin, GermanyОт EverandEnergy and Thermal Management, Air-Conditioning, and Waste Heat Utilization: 2nd ETA Conference, November 22-23, 2018, Berlin, GermanyChristine JuniorОценок пока нет
- Chateaubriand Mémoires Master IndexДокумент1 084 страницыChateaubriand Mémoires Master IndexpantoleОценок пока нет
- Canada's Budget TriumphДокумент29 страницCanada's Budget TriumphpantoleОценок пока нет
- Augmented Hydrogen Storage in Novel Nanoporous Carbon Based ArchitecturesДокумент2 страницыAugmented Hydrogen Storage in Novel Nanoporous Carbon Based ArchitecturespantoleОценок пока нет
- Recognizing Verbal Irony in Spontaneous SpeechДокумент20 страницRecognizing Verbal Irony in Spontaneous SpeechpantoleОценок пока нет
- The 100 Most Cited Articles in AIChE Journal History - 2003Документ3 страницыThe 100 Most Cited Articles in AIChE Journal History - 2003pantoleОценок пока нет
- History of Flash Part - 2Документ7 страницHistory of Flash Part - 2YOGESHWER NATH SINGHОценок пока нет
- Understanding Bernoulli's Principle Through Simulations PDFДокумент4 страницыUnderstanding Bernoulli's Principle Through Simulations PDFIoannis GaroufalidisОценок пока нет
- Poems Prescribed For 2012-2014 English B CSEC ExamsДокумент24 страницыPoems Prescribed For 2012-2014 English B CSEC ExamsJorge Martinez Sr.100% (2)
- 3161 GIS Data ModelsДокумент13 страниц3161 GIS Data Modelsapi-3788255Оценок пока нет
- Biologically Active Compounds From Hops and Prospects For Their Use - Karabín 2016Документ26 страницBiologically Active Compounds From Hops and Prospects For Their Use - Karabín 2016Micheli Legemann MonteОценок пока нет
- Me8072 Renewable Sources of EnergyДокумент13 страницMe8072 Renewable Sources of EnergyNallappan Rajj AОценок пока нет
- Design Documentation ChecklistДокумент8 страницDesign Documentation ChecklistGlenn Stanton100% (1)
- Tsel Manual ThermoselДокумент25 страницTsel Manual ThermoselPedro AlvelaisОценок пока нет
- Relationsh Between EM and Young S ModuliДокумент7 страницRelationsh Between EM and Young S ModuliDwight AndersonОценок пока нет
- Accuity: High Speed Automated 2D & 3D Optical Gauging Single Click Setup and InspectionДокумент4 страницыAccuity: High Speed Automated 2D & 3D Optical Gauging Single Click Setup and InspectionAPPLEОценок пока нет
- Digital Signal Processing: B.E Ece (5Th Semester)Документ17 страницDigital Signal Processing: B.E Ece (5Th Semester)Saatwat CoolОценок пока нет
- Dialog Bahasa InggirsДокумент2 страницыDialog Bahasa InggirsKeRtha NeghaRaОценок пока нет
- Physics 101Документ21 страницаPhysics 101Kuna KunavathiОценок пока нет
- Fret Position Calculator - StewmacДокумент1 страницаFret Position Calculator - StewmacJuan Pablo Sepulveda SierraОценок пока нет
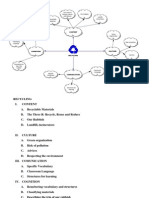
- Recycling Mind MapДокумент2 страницыRecycling Mind Mapmsole124100% (1)
- Serving North Central Idaho & Southeastern WashingtonДокумент12 страницServing North Central Idaho & Southeastern WashingtonDavid Arndt100% (3)
- Angewandte: ChemieДокумент13 страницAngewandte: ChemiemilicaОценок пока нет
- Chapter 5 AGVДокумент76 страницChapter 5 AGVQuỳnh NguyễnОценок пока нет
- 3.1 - Sequences and SeriesxbxhhdДокумент92 страницы3.1 - Sequences and SeriesxbxhhdHelloОценок пока нет
- TS SR Chemistry Imp Questions PDFДокумент5 страницTS SR Chemistry Imp Questions PDFUnknown Khan100% (3)