Вам также может понравиться
- Instructivo Anteproyecto PDFДокумент10 страницInstructivo Anteproyecto PDFJoseAndresCarreñoОценок пока нет
- Manual para Almacenamiento e Instalación de Hormigones RefractariosДокумент47 страницManual para Almacenamiento e Instalación de Hormigones RefractariosRuben Dario Mayorga FrancoОценок пока нет
- Investigación de Campo de Ingeniería de SoftwareДокумент3 страницыInvestigación de Campo de Ingeniería de SoftwareLizeth Jimenez JassoОценок пока нет
- Arquitectura de ComputadorasДокумент47 страницArquitectura de ComputadorasRigoberto He HeОценок пока нет
- Infografia Linea Del Tiempo Profesional AmarilloДокумент9 страницInfografia Linea Del Tiempo Profesional AmarilloPaola de LeonОценок пока нет
- CalculoДокумент13 страницCalculoBfidbzОценок пока нет
- Apuntes de Tecnología de Los Materias de Construccion Seguda ParteДокумент77 страницApuntes de Tecnología de Los Materias de Construccion Seguda ParteJorge Blanco Choque100% (1)
- Drenaje e Impermeabilización Durante Construccion TunelДокумент37 страницDrenaje e Impermeabilización Durante Construccion TunelDiego AcostaОценок пока нет
- Instalaciones EléctricasДокумент57 страницInstalaciones EléctricasJessica Sanchez100% (2)
- Tarea Semana 5 A PDFДокумент2 страницыTarea Semana 5 A PDFJairo Neira0% (1)
- Inf 003Документ4 страницыInf 003Joan Perez TiconaОценок пока нет
- Clase 3 ReversibilidadДокумент35 страницClase 3 ReversibilidadGNZLОценок пока нет
- Qué Es La Permanganometría Carlos Leija 4AДокумент7 страницQué Es La Permanganometría Carlos Leija 4AEduardo AlvarezОценок пока нет
- MONOGRAFIA Termodinamica BiofisicaДокумент10 страницMONOGRAFIA Termodinamica BiofisicaAngie Zambrano100% (1)
- PEC 1 QFIV Soluciones 2019 2020Документ3 страницыPEC 1 QFIV Soluciones 2019 2020HenarОценок пока нет
- Ficha TecnicaДокумент3 страницыFicha TecnicaJose Ramon Florez OrdizОценок пока нет
- Aeropuertos en Ingenieria CivilДокумент76 страницAeropuertos en Ingenieria CivilJoelHuamayalliОценок пока нет
- Extracción de Alcaloides TotalesДокумент3 страницыExtracción de Alcaloides TotalesGiordano Rojas CandiaОценок пока нет
- Simba M4-CДокумент15 страницSimba M4-CRD Gian100% (1)
- QGIS 2.14 PyQGISDeveloperCookbook EsДокумент109 страницQGIS 2.14 PyQGISDeveloperCookbook EsclaudioОценок пока нет
- Informe Cinetica Azul de MetilenoДокумент22 страницыInforme Cinetica Azul de Metilenomarcelaccz50% (2)
- Salpicadero 4Документ3 страницыSalpicadero 4Jose Carlos Medran GarciaОценок пока нет
- Normas APIДокумент11 страницNormas APIDhym HumarОценок пока нет
- IE AP03 AA4 EV05 Ingles Conversacion Gustos Intereses PreferenciasДокумент4 страницыIE AP03 AA4 EV05 Ingles Conversacion Gustos Intereses PreferenciasJimmy Washington Ortega Rodriguez0% (1)
- Juan Pablo Ramos UcharicoДокумент55 страницJuan Pablo Ramos UcharicoPablo RamosОценок пока нет
- Disertacion Hidrologia EvapotranspiracionДокумент2 страницыDisertacion Hidrologia EvapotranspiracionCesar Gutierrez NinahuamanОценок пока нет
- Vigas y Tipos de ApoyoДокумент4 страницыVigas y Tipos de ApoyoYonersi FerrerasОценок пока нет
- Formato de Inspección Katerin Mercado Salud Ocupacional UNADДокумент10 страницFormato de Inspección Katerin Mercado Salud Ocupacional UNADKaterin Mercado MestraОценок пока нет
- Ejemplo TrabeДокумент10 страницEjemplo TrabetomascuevasОценок пока нет
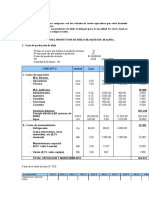
- Costos Operativos Del Productor de HieloДокумент2 страницыCostos Operativos Del Productor de HieloJohn NeciosupОценок пока нет