Вам также может понравиться
- Operating System Exercises - Chapter 5-ExrДокумент2 страницыOperating System Exercises - Chapter 5-ExrevilanubhavОценок пока нет
- Operating System Exercises - Chapter 13-SolДокумент4 страницыOperating System Exercises - Chapter 13-Solevilanubhav100% (1)
- Operating System Exercises - Chapter 16-SolДокумент4 страницыOperating System Exercises - Chapter 16-SolevilanubhavОценок пока нет
- Nav 6Документ6 страницNav 6shailesh singhОценок пока нет
- Digital Light ProcessingДокумент22 страницыDigital Light ProcessingRahul Kumar0% (1)
- Algorithms, Performativity and Governability - IntronaДокумент16 страницAlgorithms, Performativity and Governability - IntronaCristina AndreeaОценок пока нет
- Algorithms For Parallel MachinesДокумент7 страницAlgorithms For Parallel Machinesshinde_jayesh2005Оценок пока нет
- Circular Linked List Data StructureДокумент47 страницCircular Linked List Data StructureAdrian IosifОценок пока нет
- Quiz2 3510 Cheat-SheetДокумент4 страницыQuiz2 3510 Cheat-SheetKatherine Pham100% (1)
- Heart Rate Variability: Measures and ModelsДокумент84 страницыHeart Rate Variability: Measures and Modelsygh100% (1)
- MC0080 Analysis and Design of AlgorithmsДокумент15 страницMC0080 Analysis and Design of AlgorithmsGaurav Singh JantwalОценок пока нет
- Operating System Exercises - Chapter 11-SolДокумент4 страницыOperating System Exercises - Chapter 11-SolevilanubhavОценок пока нет
- Data Mining Is Defined As The Procedure of Extracting Information From Huge Sets of DataДокумент6 страницData Mining Is Defined As The Procedure of Extracting Information From Huge Sets of DataOdem Dinesh ReddyОценок пока нет
- Operating SystemsДокумент7 страницOperating SystemsIT8109Оценок пока нет
- OS Quiz 1Документ4 страницыOS Quiz 1Mohamad Syahmi0% (1)
- C# FaqДокумент19 страницC# Faqapi-3748960Оценок пока нет
- Digital Video ProcessingДокумент261 страницаDigital Video ProcessingmuthubeОценок пока нет
- Operating System Exercises - Chapter 9 SolДокумент6 страницOperating System Exercises - Chapter 9 SolevilanubhavОценок пока нет
- Embedded Linux 4d Slides PDFДокумент392 страницыEmbedded Linux 4d Slides PDFPaul RattinkОценок пока нет
- Instruction Sets in Computer ArchitectureДокумент52 страницыInstruction Sets in Computer ArchitectureEswin AngelОценок пока нет
- Assignment - IC Binary Trees SolutionsДокумент34 страницыAssignment - IC Binary Trees SolutionsDrKrishna Priya ChakireddyОценок пока нет
- C# Questions1Документ11 страницC# Questions1Sundari MuruganОценок пока нет
- OS Concepts Chapter 2 Solution To Practice Exercises Part 2Документ2 страницыOS Concepts Chapter 2 Solution To Practice Exercises Part 2Alfred Fred100% (2)
- Hands On PythonДокумент123 страницыHands On PythonRohit Vishal Kumar100% (1)
- Algorithm and ComplexityДокумент42 страницыAlgorithm and ComplexityRichyОценок пока нет
- Continuous Integration - From Theory To PracticeДокумент61 страницаContinuous Integration - From Theory To PracticepavanimopuriОценок пока нет
- OS TotalДокумент50 страницOS TotalHarisson Pham100% (1)
- Programming in C Data Structures 14pcd23Документ112 страницProgramming in C Data Structures 14pcd23ISHITA BASU ROYОценок пока нет
- An Introduction To Computer Architecture and Organization: Asmara AliasДокумент65 страницAn Introduction To Computer Architecture and Organization: Asmara AliasarisashifaОценок пока нет
- Computer Vision QuestionsДокумент1 страницаComputer Vision QuestionsMedia PartnerОценок пока нет
- Real Time Operating System Based Design-1Документ121 страницаReal Time Operating System Based Design-1Prajna S BhatОценок пока нет
- Linked List - SLLДокумент15 страницLinked List - SLLHashmi MajidОценок пока нет
- Unit 2 Embedded CДокумент43 страницыUnit 2 Embedded CRohitОценок пока нет
- ONVIF Streaming Spec v210Документ31 страницаONVIF Streaming Spec v210intrawayОценок пока нет
- Darshan Institute of Engineering & TechnologyДокумент49 страницDarshan Institute of Engineering & TechnologyDhrumil DancerОценок пока нет
- Computer Organization and Architecture: GATE CS Topic Wise QuestionsДокумент52 страницыComputer Organization and Architecture: GATE CS Topic Wise QuestionsAfaq AhmedОценок пока нет
- Embedded System: Real-Time Operating SystemsДокумент33 страницыEmbedded System: Real-Time Operating SystemsTamiru DerejeОценок пока нет
- Computer Architecture I Lecture Notes: Dr. Ali Muhtaroğlu Fall 2009 METU Northern Cyprus CampusДокумент31 страницаComputer Architecture I Lecture Notes: Dr. Ali Muhtaroğlu Fall 2009 METU Northern Cyprus CampusmalkovanОценок пока нет
- CO Unit 2-1Документ15 страницCO Unit 2-1Aravinder Reddy SuramОценок пока нет
- Questions Pool For Distributed SystemsДокумент15 страницQuestions Pool For Distributed SystemsSai MovvaОценок пока нет
- Purpose of Language ProcessorsДокумент7 страницPurpose of Language Processorsall4downloads100% (2)
- Network Routing: &: AlgorithmsДокумент45 страницNetwork Routing: &: AlgorithmsArun0% (1)
- CS1601 Computer ArchitectureДокумент389 страницCS1601 Computer Architectureainugiri100% (1)
- Bitwise OperationДокумент8 страницBitwise Operationsmith_5Оценок пока нет
- CA 2marksДокумент41 страницаCA 2marksJaya ShreeОценок пока нет
- Solutions of Operating System CH1Документ4 страницыSolutions of Operating System CH1a23105Оценок пока нет
- Data Mining Classification Algorithms: Credits: Padhraic SmythДокумент54 страницыData Mining Classification Algorithms: Credits: Padhraic SmythOm Prakash SharmaОценок пока нет
- 15cs204j-Algorithm Design and AnalysisДокумент3 страницы15cs204j-Algorithm Design and AnalysisAnugrah SinghalОценок пока нет
- Advanced C SyllabusДокумент1 страницаAdvanced C SyllabusbabanpОценок пока нет
- Project Synopsis ImagecaptioningДокумент5 страницProject Synopsis ImagecaptioningRaunak JalanОценок пока нет
- Algorithm Analysis and Design - LectureДокумент94 страницыAlgorithm Analysis and Design - LectureSuleiman GargaareОценок пока нет
- Open Source SyllabusДокумент2 страницыOpen Source SyllabusUmaMaheswariShanmugamОценок пока нет
- 29-2 CДокумент8 страниц29-2 Canon_621618677Оценок пока нет
- Ics2307 Simulation and ModellingДокумент79 страницIcs2307 Simulation and ModellingOloo PunditОценок пока нет
- Introduction To Computer NetworksДокумент6 страницIntroduction To Computer Networksjoel lacayОценок пока нет
- ARTIFICIAL NEURAL NETWORKS-moduleIIIДокумент61 страницаARTIFICIAL NEURAL NETWORKS-moduleIIIelakkadanОценок пока нет
- Optimum Array Processing: Part IV of Detection, Estimation, and Modulation TheoryОт EverandOptimum Array Processing: Part IV of Detection, Estimation, and Modulation TheoryОценок пока нет
- Network Management System A Complete Guide - 2020 EditionОт EverandNetwork Management System A Complete Guide - 2020 EditionРейтинг: 5 из 5 звезд5/5 (1)
- Partial-Update Adaptive Signal Processing: Design Analysis and ImplementationОт EverandPartial-Update Adaptive Signal Processing: Design Analysis and ImplementationОценок пока нет
- GSM Word FileДокумент11 страницGSM Word FileevilanubhavОценок пока нет
- Mobile Computing PaperДокумент13 страницMobile Computing PaperevilanubhavОценок пока нет
- Black Box Testing m10L24Документ6 страницBlack Box Testing m10L24evilanubhavОценок пока нет
- White Box Testing ExplanationДокумент10 страницWhite Box Testing Explanationmukesh427Оценок пока нет
- Coding and Testing m10L23Документ11 страницCoding and Testing m10L23evilanubhavОценок пока нет
- Mobile Computing Unit 1, 2Документ276 страницMobile Computing Unit 1, 2evilanubhav67% (3)
- Operating System Exercises - Chapter 18-SolДокумент2 страницыOperating System Exercises - Chapter 18-SolevilanubhavОценок пока нет
- Operating System Exercises - Chapter 22-SolДокумент4 страницыOperating System Exercises - Chapter 22-SolevilanubhavОценок пока нет
- Broadcast DisksДокумент5 страницBroadcast Disksevilanubhav100% (1)
- Operating System Exercises - Chapter 20-SolДокумент2 страницыOperating System Exercises - Chapter 20-SolevilanubhavОценок пока нет
- Operating System Exercises - Chapter 21-SolДокумент8 страницOperating System Exercises - Chapter 21-Solevilanubhav100% (1)
- Operating System Exercises - Chapter 4 SolДокумент2 страницыOperating System Exercises - Chapter 4 Solevilanubhav33% (3)
- GSM NetworkДокумент11 страницGSM NetworkevilanubhavОценок пока нет
- Operating System Exercises - Chapter 19-SolДокумент2 страницыOperating System Exercises - Chapter 19-SolevilanubhavОценок пока нет
- Operating System Exercises - Chapter 9 SolДокумент6 страницOperating System Exercises - Chapter 9 SolevilanubhavОценок пока нет
- Operating System Exercises - Chapter 17-SolДокумент2 страницыOperating System Exercises - Chapter 17-SolevilanubhavОценок пока нет
- Operating System Exercises - Chapter 11-SolДокумент4 страницыOperating System Exercises - Chapter 11-SolevilanubhavОценок пока нет
- Operating System Exercises - Chapter 14-SolДокумент2 страницыOperating System Exercises - Chapter 14-SolevilanubhavОценок пока нет
- Operating System Exercises - Chapter 23-SolДокумент2 страницыOperating System Exercises - Chapter 23-SolevilanubhavОценок пока нет
- WindowsXP sp3Документ12 страницWindowsXP sp3evilanubhav100% (1)
- Operating System Exercises - Chapter 15-SolДокумент2 страницыOperating System Exercises - Chapter 15-SolevilanubhavОценок пока нет
- Operating System Exercises - Chapter 10-SolДокумент4 страницыOperating System Exercises - Chapter 10-Solevilanubhav100% (1)
- Operating System Exercises - Chapter 3 SolДокумент2 страницыOperating System Exercises - Chapter 3 Solevilanubhav67% (3)
- Operating System Exercises - Chapter 4-ExrДокумент2 страницыOperating System Exercises - Chapter 4-ExrevilanubhavОценок пока нет
- 2 ExrДокумент2 страницы2 ExrevilanubhavОценок пока нет
- Operating System Exercises - Chapter 3-ExrДокумент2 страницыOperating System Exercises - Chapter 3-ExrevilanubhavОценок пока нет
- Operating System Exercises - Chapter 2 SolДокумент4 страницыOperating System Exercises - Chapter 2 Solevilanubhav75% (4)
- WWW Ranker Com List Best-Isekai-Manga-Recommendations Ranker-AnimeДокумент8 страницWWW Ranker Com List Best-Isekai-Manga-Recommendations Ranker-AnimeDestiny EasonОценок пока нет
- RH-A Catalog PDFДокумент1 страницаRH-A Catalog PDFAchmad KОценок пока нет
- FS-1040 FS-1060DN: Parts ListДокумент23 страницыFS-1040 FS-1060DN: Parts List1980cvvrОценок пока нет
- Board of Technical Education (Student Marksheet)Документ2 страницыBoard of Technical Education (Student Marksheet)Manoj SainiОценок пока нет
- Community Profile and Baseline DataДокумент7 страницCommunity Profile and Baseline DataEJ RaveloОценок пока нет
- Six Sigma PresentationДокумент17 страницSix Sigma PresentationDhular HassanОценок пока нет
- Internal Resistance To Corrosion in SHS - To Go On WebsiteДокумент48 страницInternal Resistance To Corrosion in SHS - To Go On WebsitetheodorebayuОценок пока нет
- Homework 9Документ1 страницаHomework 9Nat Dabuét0% (1)
- 5steps To Finding Your Workflow: by Nathan LozeronДокумент35 страниц5steps To Finding Your Workflow: by Nathan Lozeronrehabbed100% (2)
- Levels of CommunicationДокумент3 страницыLevels of CommunicationAiyaz ShaikhОценок пока нет
- Stress Management HandoutsДокумент3 страницыStress Management HandoutsUsha SharmaОценок пока нет
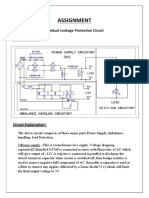
- Assignment: Residual Leakage Protection Circuit Circuit DiagramДокумент2 страницыAssignment: Residual Leakage Protection Circuit Circuit DiagramShivam ShrivastavaОценок пока нет
- CM2192 - High Performance Liquid Chromatography For Rapid Separation and Analysis of A Vitamin C TabletДокумент2 страницыCM2192 - High Performance Liquid Chromatography For Rapid Separation and Analysis of A Vitamin C TabletJames HookОценок пока нет
- AP8 Q4 Ip9 V.02Документ7 страницAP8 Q4 Ip9 V.02nikka suitadoОценок пока нет
- BECED S4 Motivational Techniques PDFДокумент11 страницBECED S4 Motivational Techniques PDFAmeil OrindayОценок пока нет
- Configuration Guide - Interface Management (V300R007C00 - 02)Документ117 страницConfiguration Guide - Interface Management (V300R007C00 - 02)Dikdik PribadiОценок пока нет
- Documentation Report On School's Direction SettingДокумент24 страницыDocumentation Report On School's Direction SettingSheila May FielОценок пока нет
- SievesДокумент3 страницыSievesVann AnthonyОценок пока нет
- Digital Systems Project: IITB CPUДокумент7 страницDigital Systems Project: IITB CPUAnoushka DeyОценок пока нет
- 5620 SAM Rel 14 License Point Configuration ToolДокумент416 страниц5620 SAM Rel 14 License Point Configuration Toolluis100% (1)
- Dec 2-7 Week 4 Physics DLLДокумент3 страницыDec 2-7 Week 4 Physics DLLRicardo Acosta Subad100% (1)
- Naval TV SystemДокумент24 страницыNaval TV Systemsharmasandeep0010Оценок пока нет
- Leveriza Heights SubdivisionДокумент4 страницыLeveriza Heights SubdivisionTabordan AlmaeОценок пока нет
- Church and Community Mobilization (CCM)Документ15 страницChurch and Community Mobilization (CCM)FreethinkerTianОценок пока нет
- Pitch DeckДокумент21 страницаPitch DeckIAОценок пока нет
- Abnt NBR 16868 1 Alvenaria Estrutural ProjetoДокумент77 страницAbnt NBR 16868 1 Alvenaria Estrutural ProjetoGIOVANNI BRUNO COELHO DE PAULAОценок пока нет
- Blake Mouton Managerial GridДокумент3 страницыBlake Mouton Managerial GridRashwanth Tc100% (1)
- Object Oriented ParadigmДокумент2 страницыObject Oriented ParadigmDickson JohnОценок пока нет
- Man Bni PNT XXX 105 Z015 I17 Dok 886160 03 000Документ36 страницMan Bni PNT XXX 105 Z015 I17 Dok 886160 03 000Eozz JaorОценок пока нет
- Chapter 2 HydrateДокумент38 страницChapter 2 HydrateTaha Azab MouridОценок пока нет