Вам также может понравиться
- Desgn ProcdureДокумент7 страницDesgn ProcdureHairi MuhammadОценок пока нет
- BW1350 DNVДокумент4 страницыBW1350 DNVharmvdwОценок пока нет
- GuideДокумент20 страницGuideskannan6747Оценок пока нет
- SINGLE LINE DIAGRAM (H-8001) Rev 2Документ13 страницSINGLE LINE DIAGRAM (H-8001) Rev 2wahyuОценок пока нет
- 400te Linear WinchДокумент2 страницы400te Linear Winchjohariak100% (1)
- Braking ResistorДокумент10 страницBraking ResistorJoa QuispeОценок пока нет
- Paper Design and Manufacturing of Fixture For Leveling of End Carriage in The Assembly of End CarriageДокумент11 страницPaper Design and Manufacturing of Fixture For Leveling of End Carriage in The Assembly of End CarriageSumit TatedОценок пока нет
- Steeringgearsandrudders Propellers 180905170942 PDFДокумент142 страницыSteeringgearsandrudders Propellers 180905170942 PDFMuhammad Saiful260298100% (1)
- Lights For Tugs and BargesДокумент1 страницаLights For Tugs and BargesMocanu BiancaОценок пока нет
- 4.15 - Penstock Intake - Stoplog and Gantry CraneДокумент2 страницы4.15 - Penstock Intake - Stoplog and Gantry Cranesrigirisetty208Оценок пока нет
- Francis Turbine Manual PDFДокумент6 страницFrancis Turbine Manual PDFprinceОценок пока нет
- To Meet Your Challenges: Foldable Knuckle Boom Telescopic Boom Jib Knuckle Boom Heavy Duty Foldable Knuckle BoomДокумент24 страницыTo Meet Your Challenges: Foldable Knuckle Boom Telescopic Boom Jib Knuckle Boom Heavy Duty Foldable Knuckle BoompradewoОценок пока нет
- 2data Anchor Windlass CapstanДокумент56 страниц2data Anchor Windlass CapstanFrank RoperОценок пока нет
- Manual Manutenção Guincho WarnДокумент35 страницManual Manutenção Guincho WarnAnderson K LimaОценок пока нет
- NREL Wind Diesel Power System BasicsДокумент40 страницNREL Wind Diesel Power System BasicsMg MgОценок пока нет
- 科尼起重机 ShipyardДокумент16 страниц科尼起重机 ShipyardHui ChenОценок пока нет
- CH165A-AB: 13,700 LB First Layer Line PullДокумент2 страницыCH165A-AB: 13,700 LB First Layer Line Pulliyan supriadiОценок пока нет
- Hydraulically Driven Deck MachineryДокумент2 страницыHydraulically Driven Deck MachineryMohamed FouadОценок пока нет
- Section 6 Technical Specification & DrawingsДокумент168 страницSection 6 Technical Specification & Drawingspavankumar001Оценок пока нет
- Fabrication of Pneumatic Bearing Puller PDFДокумент2 страницыFabrication of Pneumatic Bearing Puller PDFBeth0% (2)
- Div14 Crane Specifications June2012-1Документ10 страницDiv14 Crane Specifications June2012-1mightsrightОценок пока нет
- The Tata Power Company Limited Bhira 100Mw-Augmentation Scheme Including Mulshi Lake Sub-Storage UtilizationДокумент7 страницThe Tata Power Company Limited Bhira 100Mw-Augmentation Scheme Including Mulshi Lake Sub-Storage Utilizationpavankumar001100% (1)
- 3t Monorail Provision CraneДокумент21 страница3t Monorail Provision CranesridharОценок пока нет
- Damen Booster Station 500Документ2 страницыDamen Booster Station 500Carlos Marcelo CostaОценок пока нет
- Crane Load Chart-D-008 R2 (2) 52Документ1 страницаCrane Load Chart-D-008 R2 (2) 52sdОценок пока нет
- Exide Traction Battery HSP PDFДокумент4 страницыExide Traction Battery HSP PDFRAJKUMARОценок пока нет
- 200te Reel Hub DriveДокумент3 страницы200te Reel Hub Drivejohariak100% (1)
- Spec. no.C-9202-R2 - Oct 08Документ32 страницыSpec. no.C-9202-R2 - Oct 08Sumit ShyamalОценок пока нет
- Q22-Fat Procedure SN 1676 Mt1-Cr-7350 - BДокумент29 страницQ22-Fat Procedure SN 1676 Mt1-Cr-7350 - BAnonymous 1ykzuaxWgYОценок пока нет
- Technical Manual Mooring Winch Type MW 022-44c-E117 (KN) Dwg. 32164-1 DMT 219138Документ119 страницTechnical Manual Mooring Winch Type MW 022-44c-E117 (KN) Dwg. 32164-1 DMT 219138Ciprian MariusОценок пока нет
- Catálogo - Cubículos 8DH10 PDFДокумент44 страницыCatálogo - Cubículos 8DH10 PDFRicardo Nunes Pereira JuniorОценок пока нет
- Cranes Cargo PDFДокумент4 страницыCranes Cargo PDFpangestu100% (1)
- GL Cargo CraneДокумент2 страницыGL Cargo CraneDharmawan100% (1)
- 4 Types of DC Motors and Their CharacteristicsДокумент5 страниц4 Types of DC Motors and Their CharacteristicsNuno HenriquesОценок пока нет
- 10te Air TuggerДокумент1 страница10te Air TuggerjohariakОценок пока нет
- TM-ZT1004H: ModelДокумент5 страницTM-ZT1004H: ModelKormandi KDAОценок пока нет
- Catalog Vinciuri IMATRANSДокумент18 страницCatalog Vinciuri IMATRANSVlad AndronacheОценок пока нет
- Selection of Centrifugal Pumping EquipmentДокумент11 страницSelection of Centrifugal Pumping Equipmentshahzad32552372Оценок пока нет
- Quality Control Measurement Report Subject: Propeller Push Up. Rudder & Propeller Section Nord HoustonДокумент2 страницыQuality Control Measurement Report Subject: Propeller Push Up. Rudder & Propeller Section Nord HoustonAhmed Magdy100% (1)
- Automatic Raising BollardsДокумент26 страницAutomatic Raising BollardsK SubramaniОценок пока нет
- Puller PowerДокумент17 страницPuller Powerelangandhi100% (1)
- E-23 Shore Connection BoxДокумент27 страницE-23 Shore Connection Boxcengiz kutukcuОценок пока нет
- 30te Hydraulic Winch: Underwater Technology Services (S) Pte LTDДокумент5 страниц30te Hydraulic Winch: Underwater Technology Services (S) Pte LTDjohariakОценок пока нет
- Propeller Blade Repair SolutionДокумент2 страницыPropeller Blade Repair SolutionPoowadol NiyomkaОценок пока нет
- 16-Inch DSC Cutter Suction DredgerДокумент4 страницы16-Inch DSC Cutter Suction DredgerAchmad AfandiОценок пока нет
- 4.8. TC4400KF User ManualДокумент116 страниц4.8. TC4400KF User ManualMichel Rodrigues100% (1)
- Lithium Battery For Electric Rickshaw (July2019)Документ16 страницLithium Battery For Electric Rickshaw (July2019)paul_costasОценок пока нет
- Technical Parameter of Spiral ClassifierДокумент1 страницаTechnical Parameter of Spiral ClassifierTerancen RajuОценок пока нет
- DHPS Lecturer Notes FinalДокумент135 страницDHPS Lecturer Notes FinalvanajaОценок пока нет
- 30tonne Transvictory Double Drum Winch PDFДокумент1 страница30tonne Transvictory Double Drum Winch PDFIvan MaltsevОценок пока нет
- Khan Cranes PresentationДокумент28 страницKhan Cranes PresentationMili Marius100% (1)
- Offshore Latticed Structures - Analysis of The Lattice Crane BoomДокумент1 страницаOffshore Latticed Structures - Analysis of The Lattice Crane BoomGogyОценок пока нет
- BAHIR DAR UNIVERSITY - Design of Centrifugal Pump AbДокумент30 страницBAHIR DAR UNIVERSITY - Design of Centrifugal Pump AbADEFRIS BELACHEWОценок пока нет
- Kerala State Electricity Board: Form of Application For Supply of ElectricityДокумент43 страницыKerala State Electricity Board: Form of Application For Supply of ElectricityManisha DubeyОценок пока нет
- L2 Francis Turbine 2020 PDFДокумент73 страницыL2 Francis Turbine 2020 PDFBalkrishna ChaudharyОценок пока нет
- As 62271.200-2005 High-Voltage Switchgear and Controlgear A.C. Metal-Enclosed Switchgear and Controlgear ForДокумент10 страницAs 62271.200-2005 High-Voltage Switchgear and Controlgear A.C. Metal-Enclosed Switchgear and Controlgear ForSAI Global - APACОценок пока нет
- Structural Analysis of Hopper Suction DredgerДокумент10 страницStructural Analysis of Hopper Suction DredgerIvan GrbavacОценок пока нет
- IS 6938 (2005) - Design of Rope Drum and Chain Hoists For Hydraulic Gates - Code of PracticeДокумент16 страницIS 6938 (2005) - Design of Rope Drum and Chain Hoists For Hydraulic Gates - Code of PracticeSuleman KhanОценок пока нет
- Design of Rope Drum and Chain HoistsДокумент19 страницDesign of Rope Drum and Chain Hoistssuresh_501100% (1)
- Tub EtambouДокумент8 страницTub EtambouSpeedy Gonzales Riba RibaОценок пока нет
- Pipe FlotationДокумент5 страницPipe FlotationabhisheknharanghatОценок пока нет
- Short Description of A Field-Testing Method With Cone Shaped Sounding ApparatusДокумент4 страницыShort Description of A Field-Testing Method With Cone Shaped Sounding ApparatusAnonymous GnfGTwОценок пока нет
- UPVC High Pressure Water Supply Piping System Installation ProcedureДокумент3 страницыUPVC High Pressure Water Supply Piping System Installation ProcedureAl Mumeen Construction ServicesОценок пока нет
- Copper-Nickel Seawater Piping SystemsДокумент48 страницCopper-Nickel Seawater Piping Systemsdandiar1100% (1)
- Chrysler Stratus Ja 1998 Wiring AllДокумент20 страницChrysler Stratus Ja 1998 Wiring Allhector100% (55)
- 7200 Series Radar Tank GaugesДокумент24 страницы7200 Series Radar Tank GaugesJavier E. OtáloraОценок пока нет
- BS 4607-5Документ18 страницBS 4607-5Jeff Anderson CollinsОценок пока нет
- JIS Valve StandardsДокумент6 страницJIS Valve StandardsUrip S. SetyadjiОценок пока нет
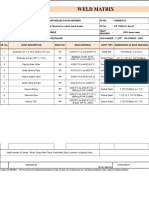
- Weld Matrix - PAGE 1&2Документ20 страницWeld Matrix - PAGE 1&2abdulgafoor54Оценок пока нет
- Osmadrain: Product and Installation ManualДокумент35 страницOsmadrain: Product and Installation Manualshafeer aboobuckerОценок пока нет
- CFD Analysis of Fluid Flow Parameters Within A Y-Shaped Branched PipeДокумент5 страницCFD Analysis of Fluid Flow Parameters Within A Y-Shaped Branched PipeHemant SharmaОценок пока нет
- Method Statement - Masterseal 345 REV D PDFДокумент17 страницMethod Statement - Masterseal 345 REV D PDFFrancois-Оценок пока нет
- Erection Procedure For Floating Roof TankДокумент10 страницErection Procedure For Floating Roof Tankabdul1207100% (2)
- GGG-STD-ONM-0005 - Live and New Pipeline Connection Procedure - Rev 01Документ12 страницGGG-STD-ONM-0005 - Live and New Pipeline Connection Procedure - Rev 01oleg safaniukОценок пока нет
- High Pressure Specialty ValvesДокумент19 страницHigh Pressure Specialty ValvesdbmingoОценок пока нет
- PM IS 458-April 2021Документ10 страницPM IS 458-April 2021sandiip.patilОценок пока нет
- Dynaflame Heating - 500 6004Документ4 страницыDynaflame Heating - 500 6004Eslam ElsayedОценок пока нет
- FTP PDFДокумент16 страницFTP PDFPankaj RaneОценок пока нет
- F1a F1C P1d32s001e 02.06Документ456 страницF1a F1C P1d32s001e 02.06Alejandro Di Gregorio100% (1)
- Vibropipe CatalougeДокумент4 страницыVibropipe CatalougeRavishankar GowdaОценок пока нет
- Astm F949Документ11 страницAstm F949Juan Carlos MendezОценок пока нет
- Horse Power (H.P.) Selection: Calculation of Discharge Rate of Bore Well, Water Level, Friction Loss in Pipes, Valves & Fittings, H.P. Selection For Submersible Pump Sets, Unit ConversionДокумент12 страницHorse Power (H.P.) Selection: Calculation of Discharge Rate of Bore Well, Water Level, Friction Loss in Pipes, Valves & Fittings, H.P. Selection For Submersible Pump Sets, Unit ConversionSantosh Kumar93% (14)
- Operating Manual For Micro Annular Gear Pumps: mzr-2505 / mzr-2905 / mzr-4605 / mzr-6305 / mzr-7205Документ89 страницOperating Manual For Micro Annular Gear Pumps: mzr-2505 / mzr-2905 / mzr-4605 / mzr-6305 / mzr-7205roni kurniawanОценок пока нет
- SolidPlant Training Manual PDFДокумент189 страницSolidPlant Training Manual PDFModelamientoDeProcesosMinerosSimmodmet100% (2)
- Crisis Management at Blast FurnaceДокумент17 страницCrisis Management at Blast FurnaceSanjay Kumar DokaniaОценок пока нет
- Flange: Slip-On Pipe FlangesДокумент3 страницыFlange: Slip-On Pipe FlangesmabroukОценок пока нет
- April 2000: Function: Marine Engineering at Operational LevelДокумент31 страницаApril 2000: Function: Marine Engineering at Operational LevelAnshu BhushanОценок пока нет
- Manual de Servicio LB-B6020CLДокумент50 страницManual de Servicio LB-B6020CLjose antonioОценок пока нет
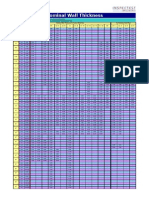
- 08A - Pipes Nominal Wall Thickness A4Документ1 страница08A - Pipes Nominal Wall Thickness A4umairasimpk100% (1)
- List Harga Spam TamakoДокумент4 страницыList Harga Spam TamakoFachruddin MadjidОценок пока нет