N 63-86264
--
- - '" ----
~ " ,' ." ~ l' '"'
.,
ZI
-
~ I
Study of a
Paraglider \
Landing System \ r
for the i
Apollo Command Module
RYAN
...
AEROSPACE
--t.
REPDRf'tf6a 61 B 1 05
10 O C ~ o t R 1961 2-11 (/
.' "
'" .i :";:
REVISIONS: INSERT LATEST CHANGED PAGES.
DESTROY SUPERSEDED PAGES.
PAGE NO. DATE
Engineering Manager
Flex-Wing Programs
Director of
Engineering
TABLE OF CONTENTS
Section Page
1.0 SUMMARY 1-1
2.0 INTRODUCTION 2-1
3.0 SYSTEM DESCRIPTION 3-1
4.0 TECHNICAL PERFORMANCE AND
REQUIREMENTS 4-1
5.0 SYSTEM DESIGN 5-1
6.0 CONCLUSIONS 6-1
7.0 APPENDIX 7-1
NOTE: The first page of the above sections contains a table of contents
for the section.
SECTION 1.0
SUMMARY
This report presents the results of a feasibility study con-
ducted by the Ryan Aeronautical Company to investigate the use of the
Rogallo Flexible-Wing principle as a recovery and landing system for
the Apollo Command Module. The program is based upon analytical
studies and upon experience gained from the testing of full scale wing
suspension systems. The results of these studies indicate that the
flexible wing will provide, under manual or automatic control, a maneu-
vering capability under all portions of the glide and landing trajectory.
Past aerodynamic data derived from the NASA and Ryan
conducted wind tunnel tests were used to define the non-rigid wing force
characteristics. These data illustrate the effect of lift and drag over the
wing angle of attack range. Landing flare studies based on this aerody-
namic data show that sink speeds of 2 to 8 ft per second are possible, de-
pending on whether a manual or on -board automatic landing system is
used. Simulation studies of pilot technique requirements suggest that in
addition to basic flight instrumentation, an instrument capable of dis-
playing rate of descent as a function of altitude will provide sufficient
information to the pilot for the flare maneuver. Performance studies
indicate a glide speed of 60 knots is to be expected during the glide phase.
Deployment studies of two distinct deployment systems indicate that a
deployment method similar to that used by parachutes will provide the
most reliable and satisfactory system.
A detailed preliminary design of the recovery and landing
system is also presented. The wings, membrane, and inflatable leading
edges and keel are constructed of dacron with polyester coating. Pres-
surization of the dual chambers in each inflatable tube occurs during wing
deployment by two independent cold gas generators, each connected to
one of the chambers in each tube. Nylon cable is used in the suspension
system for ease of packaging and to minimize deployment parachute loads.
The control system is hydraulically powered with two distinct systems
for reliability. The p r i ~ a r y system receives electrical power from the
command module and the secondary system is powered from hydraulic
accumulators. In the event of complete power failure, the wing is
trimmed for the angle of attack which results in the minimum sink rate
of approximately 35 ftl sec. Sequencing and operational schematics of
the electrical system, deployment scheme, hydraulic systems and the
on -board automatic landing system are also presented.
1-1
SECTION 2.0
INTRODUCTION
The development of the flexible wing represents a major ad-
vance in the field of aerodynamic structure by providing an extremely
lightweight, aerodynamic lifting surface. Engineering studies, under-
taken by the Ryan company, have led to numerous applications for the
wing.
Unlike the conventional wing composed of a rigid skin cover-
ing and forming structure, the flex wing is composed of a membrane of
flexible material which is attached to three supporting members. The
center keel and the two side members, or leading edges, which may be
either of rigid or inflatable construction, are joined at the foremost
point to define a triangular envelope. The edges of the flexible mem-
brane are continuously attached to the leading edges and keel, and the
wing system is joined to the vehicle by means of cables or rigid struc-
tural members. The flight trajectory of flexible wing vehicles is con-
trolled by a simple shift of the center of gravity of the vehicle with
respect to the center of pressure of the wing.
Early NASA subsonic and supersonic wind tunnel and model
flight tests have verified the feasibility of the concept. To demonstrate
the concept and obtain full scale test data, Ryan has designed and built
a manned utility vehicle incorporating this principle (Figure 2. 1). Addi-
tional verification of the concept is based on the experience and data
derived by Ryan from fabrication of full scale, inflatable wings con-
structed under government contract (Figure 2.2). The test of this
vehicle has been underway for approximately one-half year. The experi-
ence and data derived from tests of these vehicles, and their obvious
structural, weight, and packaging advantages, give strong support to this
concept as a highly satisfactory solution for recovery and landing systems.
This report provides the requirements and substantiating
data for a wing and control system preliminary design to be used as the
landing system for the Apollo Co:r;nmand Module. It gives the basic
aerodynamic data used to evaluate the vehicle gliding performance and
flight maneuvering requirements and a detailed analysis of the control
requirements. Analog and digital computing equipment was used to study
the longitudinal static and dynamic stability of the wing-command module
system. Several methods of deployment were studied and compared as
to their weight, ease of deployment, shock loads, etc. The selected
method is based on prinCiples developed under parachute technology.
2-1 1
-
2
-
2
I:\:)
I
W
RYAN
- . 61BI05
I
J
J
I
I
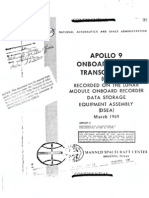
Figure 2.2 Ryan Inflatable Wing
\
,. "
f'
..
2-4
This report also describes a control system based on the
controlled displacement of the vehicle c.g. with respect to the wing
center of pressure; energy requirements for the gliding and landing
maneuvers; and the hydraulic system necessary to meet the power re-
quirements. A preliminary design of the vehicle and a structural
analysis and detailed weight breakdown are also presented. The design
gives in detail the wing structural arrangement and the suspension and
control system.
SECTION 3.0
SYSTEM DESCRIPTION
The basic configuration of the landing system consists of a
wing, suspension system, and control system (Figure 3.1). The wing
is constructed of inflatable leading edges and keel joined by a thin flexi-
ble membrane which has an area of 2, 000 sq. ft. The pressure system
for inflating the leading edges and keel is stored within the wing apex.
Deployment of the wing may be either manually or automatically initiated,
depending upon the Mach number and altitude. The suspension system
allows for a wing body separation distance of .85 times the keel length .
. Control of the vehicle is by c.g. displacement under manual direction
for the flight and landing phases. As a back up for the landing phase,
an automatic flare capability is also provided.
The wing is constructed of existing off the shelf 4 oz. and
6 oz. dacron material with Minnesota Mining and Manufacturing 4222
polyester coatings. The leading edges are 15 inches in diameter and
are divided into two separate pressure chambers. The keel is of
similar construction 17 inches in diameter. Two cold gas generators
mounted in the wing apex provide pressurization. Each generator con-
tains a gas supply adequate to inflate one-half of each of the members.
Each generator is valved to one of the chambers in each of the three tubes,
thus providing a fail-safe structure in the event of malfunction of a
pressure bottle or structural failure of a pressure chamber. The suspen-
sion system consists of nylon cabling for energy absorption. These
cables are attached to the appropriate control arms for internal load
transfer and control. The control arms are of high strength steel.
Storage of the wing, deployment parachute, pressurization
system, and cable suspension system are provided in the apex of the
Command Module (Figure 3.2). The control arms are stored within the
outer pressure vessel and the outer mold lines of the capsule ablation
coating.
Deployment of the wing is accomplished by a five foot dia-
meter guide surface parachute deployed at subsonic speeds. This chute
is deployed after ejection of the storage cover. Energy resulting from
the wing snatch load occurring during deployment is absorbed in the line
stretch, similar to parachutes. After deployment of the wing in the
parachute configuration, the pressure tubes are automatically inflated.
3-1
3-2
During the inflation period, the wing is allowed to extend to the flying
attitude. Manual initiation of the deployment sequence may be accom-
plished at any time below Mach 1.0 after the escape tower has been
jettisioned.
Manual control is provided for all phases of the flight maneu-
ver. In the event such command is not assumed for gliding flight, the
wing is trimmed, upon deployment, at an angle of attack which results in
near minimum rate of sink. Instrumentation for gliding flight includes
altitude, rate of sink, and velocity displays. A hydraulic power system
with an emergency capability actuates the control arms. The primary
system consists of an electrically driven hydraulic pump for gliding
flight. The secondary system consists of a charged accumulator for use
during the landing maneuver, and is provided with sufficient power for
minimum maneuvering gliding flight.
The landing maneuver under manual control provides rates of
sink down to 4 feet per second. Zero rate of sink may be accomplished
with automatic landings. For manual controlled landing maneuvers, an
instrument similar to the glide slope instrument used for ILS is provided.
"EEL
MEMBRANE
LEADJNG EDGE LJNl:S
UN5
GROUN.D REF. LINE
---------
\
\
-----
\
\
\
,
\
KUL LJNES (MAX L/D POSITION)
LEIUJI/fG EIJGE LINES OMITTED
FOR. CLARITY
\
\
\
\
/' -[
300 (MAX L/I) PUS"ITION)
4S"(FLltl{c rOSITION)
\ '--KEEL LINES (FLARE
L LEADINO ED6E LIN< (FLAR POSITION)
POSITION)
Gfjl>UND REF. L/NE
Figure 3. 1 Apollo Recovery System
3-3
RADAR ALTIMeTeR TRANSMITT/IVB
1- RECE.IVING ANTENN/i
COVER REMflVAL CHUTE __
(BOTH 51lJES)
SOF81{ 80MB
(80TH SIPES)
PITCH
(BOTH
HF eXTEJ.IlJA81. \
RECOYER.'! AN7NAM
UF ANTENNR ('f,/).JIP)
HY/JIlAVLlC /?ESIWOIR
---=
HATCH STbWlJ'-----
-4--- DIRECTION OF FLIGHT
FLEX WING (VEPUJ'lI'1ENT
CHUTe 5TflKl..D A130V)
"
KA])AR AL TIMETER
';!f;%/;;;TER
WINo CONTROL MECHANISM
--+-I---'--FLI!5WING LI(JI-IT
===== ---- ---- I I
____ I 7 BEACON ANTENN/l
T SN(7I:.K.EL YALVE(OUT)
/ !;NORKEL VALVE (IN)
/ / ATT! TVI/E CflJJTI?f7L TANK
(3 REIi'D)
.......... / LIFE RAFT
/ / HYD!:IHlLlC :6roJ?At;E- l3c:ir7t.E-
8AG
L-----GAS BOTTLE (f/{/X)
FLEX WING
DEPLfl YI1IJT CHUTE
PITCH ROCKET ENi3INE
FLflR,S
SflFIiX /3{)M8
CllVR KEfv'OVIIL CJ.JUTE_
SN!1R.KEL YAL V (!1V7)
HF EXTENDABLE -
RECOVERS ANTENN/I
H F IINTEN/IIA (WHIP)
HATCH STOWEI'
SNORKEL VALVE (/J,J)
J.lYDF:RULIC RE5ER VOIR
GAS
KADAR AL T/METER
TRANSMITTER -
t JlGIfII1 L DII Til
CONVERTER
TANKS
// --/ \ \
WING CON7,r:.PL MECIIANISM
RI1PIlK. ALT/METE!:.
1f-- KEC1VI#6 ItNTENNfi
.50 THICK lEFLON WINDOW
CDYRING RADAR ANTENNA
LANDING BAG
Figure 3.2 Apollo Recovery System - Equipment Design Envelope
3-4
SECTION 4.0
TECHNICAL PERFORMANCE AND REQUIREMENTS
TABLE OF CONTENTS
Section Page
4.1 Deployment Analysis 4-4
4.2 Glide Performance and Aerodynamic
Characteristics 4-21
4.3 Landing Flare Analysis 4-33
4.4 Command Control System 4-39
4.5 Control A,ctuation Power Requirements 4-40
4.6 Longitudinal Static Stability and Control 4-42
4.7 Longitudinal Dynamic Stability 4-47
4.8 Lateral Stability and Control 4-50
4-1
SECTION 4.0
TECHNICAL PERFORMANCE AND REQUffiEMENTS
The following section presents an.analysis of the deployment
sequence, and a discussion of the dynamic loads and performance during
deployment.
Glide performance with and without winds is given in the
sections following and includes a discussion of the data basis and wing
characteristics. Discussion of the longitudinal static and dynamic
stability characteristics are given in subsequent sections. Lateral
stability and control and the proposed command control system are also
discussed.
4-2
SECTION 4.1
DEPLOYMENT ANALYSIS
TABLE OF CONTENTS
Section Page
4.1.1 Recovery Environment 4-4
4.1. 2 Requirements 4-6
4.1.3 Deployment Sequencing, Loads, and
Performance - Two-Stage System 4-6
4. 1. 3. 1 Drag Chute Deployment 4-6
4.1.3.2 Drag Chute Inflation 4-11
4.1.3.3 Parawing Deployment 4-11
4.1. 3. 4 Drag Chute Disreefing 4-12
4.1.3.5 Parawing Disreefing 4-14
4.1. 4 Deployment Sequencing, Loads, and
Performance - Single Stage System 4-15
4-3
SECTION 4.1
DEPLOYMENT ANALYSIS
The deployment analysis is that aspect of a recovery problem
which deals with retardation sequencing from the standpoint of loads,
functionability, and general compatibility with all expectant flight regimes.
This analysis considers two potential methods of decelerating
the Apollo Command Module to a velocity - altitude level from which an
orderly and reliable wing deployment and subsequent inflation can be
achieved within the loading restrictions of the optimum parawing design,
the Command Module structure, and human occupant tolerances. Infla-
tion herein pertains to wing development to an effective aerodynamic lift-
ing surface as opposed to pressurization of the inflatable tubular keel and
leading edge members. The two methods are differentiated in this analy-
sis by reference to (a) a two-stage system and (b) a single stage system.
The two-stage system employs a drag chute for augmented velocity atten-
uation in addition to effecting deployment or extraction of the parawing.
These definitions, therefore, apply to the primary recovery elements
(wing and/or drag chute), exclusive of their respectively incorporated
reefing techniques.
As a two-stage system, the drag chute (14-foot nominal di-
ameter, Ribless Guide Surface) is deployed in a reefed state and subse-
quently disreefed during pressurization of the inflatable tubular wing
members. In addition, the wing also incorporates two sequential phases
of reefing which precede membrane development to the ultimate gliding
attitude. In contrast, the single-stage system requires no drag chute as
a result of an alternate wing reefing technique resembling essentially a
near square, flat constructed canopy parachute, reefed (constricted
mouth) in one phase and fully opened in the following phase. Each of these
methods employs a pilot chute (relatively small diameter for extraction
purposes only) to serve either as a deployment aid for the drag chute or
extraction of the parawing in the single stage system. A complete func-
tional description of the two systems is presented in Section 5.0.
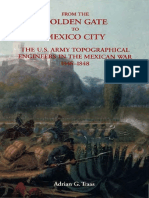
4.1.1 Recovery Environment - The deployment analyses were based
on a gross weight of 10, 000 pounds, and, where pertinent, the recovery
system weights breakdown delineated in Section 5. O. The velocity profile
and associated trajectory parameters for which the analyses were made
is the subsonic regime of the nominal re-entry profile, presented in
Figure 4.1. Included therein, as a function of altitude are, velocity,
4-4
140
120
100
'b
80
.-I
...c=
P
60
E-4
1-4
<
40
20
o
o
4-5
,
\
\
/
\
V.
\
,
"
-,
/
/
./
V'"
;
v-'
"
h
q
/
"
V
r
,
""
I
I
i .'
,
I
' ...
! "/ ' '" 7 g LIMIT VALUE
....
........ \
.... ,
I I I
,
i V. CAPSULE
\ ....... ,
"
\
\
,
i tV
\,
,
I hi
\
, ,I,
\
, '/!
,
I 'II .I
, k! ./
i I :
...
I
fl
"
\
, ,
L:
,
, ,
'-......
P
---...
1 2 3 4 5
V- 10
3
FT/SEC AND, Y '"" - 10 DEG.
AND q -10 LBS/FT2
Figure 4.1 Apollo Nominal Re-entry Trajectory
,/
,
"
"
\
\
\
,
I
I
,
I
,
I
,
,
I
I
6
ZI
fiji
~ I
trajectory angle and, dynamic pressure. Additionally noted for compar-
ison are (a) equilibrium L/D-max. speed, (b) equilibrium ( 'Y = - 90j
capsule -alone speed, and (c) g- limiting wing inflation (terminal wing
disreefment to a gliding attitude). Selective on-pad abort conditions and
the "high q" off-pad abort condition, although secondary to the re-entry
profile from the standpoint of high loading conditions, are presented in
Figures 4.2 through 4. 4.
4. 1. 2 Requirements - Both methods of parawing deployment shall
be activated and initiated in the same manner. Activation of the system
at or near apogee by utilization of the radar altimeter, employed else-
where, provides a maximum and hence safe deactivated period. Since
automatic initiation follows descent of the Command Module below an
absolute geometric altitude, tentatively selected at 40,000 ft., on- and
most off- pad abort conditions produce simultaneous activation and recov-
ery initiation near apogee where low dynamic pressures prevail and
maximum range performance is assured. A fixed time interval, however,
always follows the on-set of activation prior to virtual initiation. This
gives time for capsule orientation and escape tower separation.
4.1. 3 Deployment Sequencing, Loads, and Performance - 2 Stage
System - The follOWing subsections analyze for the 2-stage system, the
deceleration sequencing to equilibrium flight, associated altitude losses
thereto, dynamic loads incurred during deployment, and opening shock of
virtual and/or effective (reefed) stages. The employed analytical techni-
ques are considered adequate for preliminary design and hence preclude
a sophisticated iterative time-history analysis.
4.1. 3.1 Drag Chute Deployment - When initially deployed, the drag
chute is reefed to a diameter corresponding to a 90% reduction in effec-
tive drag area (CDS) when fully opened. This reefed diameter is within
functional performance restrictions of parachute reefing techniques, yet
is not too large to cause high extraction forces on the wing which produce
excessive snatch loads. Moreover; the reefed drag chute is capable of
supporting, exclusive of reefed wing drag, the weight of the wing and min-
imization of wing fluttering.
The time required to deploy the drag chute, and the ensuing
loss in altitude, require simultaneous solution of the two-body equations
of motion. This leads to the establishment of the distance each body has
traveled in a common time interval such that the relative distance corre-
sponds to the interconnected flexible tow or suspension line length.
4-6
7
6
5
~
r:t.
ct:)
4 0
'1"""1
I
~
~
::>
E-4
3
-<
2
1
o
o
4-7
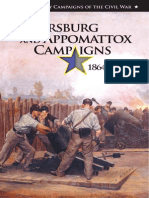
T1 = 302,000 LBS.(S. L.) , O ~ t <1
T2 = 103,000 LBS.(S. L.), 1 ~ t ~ 4
. W = 16,700 LBS.
SYMBOL
0
A
LI
<>
2 4 6
VELOCITY - 10
2
FT/SEC.
Figure 4.2 Velocity Profile On-Pad Abort
INITIAL CANT
ANGLE, DEG.
0
5
15
20
8 10
E-4
0
....-I
riI
P
E-4
r::
...:I
<
T
1
= 302,000 LBS.(S.L.),
T 2 = 103, 000 LBS. (S. L.), 1 t 4
W = 16,700 LBS.
7
6
INITIAL CANT
SYMBOL
ANGLE. DEG.
0 0
5
A 5
LI 15
0 20
4
3
2
1
o
o 2 4 6 8 10
DYNAMIC PRESSURE - 10
2
LBS/FT.2
Figure 4.3 Dynamic Pressure Profile On-Pad Abort
4-8
~
~
~
0
,.-j
~
~
p
~
~
~
~
<
4-9
70
60
50
40
T1 = 320, 000 LBS. (ALT.) , O ~ t < 1
T2 = 109,000 LBS. (ALT.) , 1 ~ t ~ 4
W = 16, 700 LBS.
.. APOGEE
30 ~ - - - - - - ~ - - - - - - ~ - - - - - - ~ - - - - - - - ~ ~ - - - - - - ~ - - - - - - ~
o 4 8 12 16
DYNAMIC PRESSURE - 10
2
LBS/FT.
2
AND
VELOCITY - 10
2
FT./SEC.
Figure 4.4 Maximum Dynamic Pressure Abort Profile
20 24
Consider the following equations of motion of two point-mass
bodies along an arbitrary flight path, 'Y, and relative to an axis system to
which each body initially was at rest:
x = - g sin 'Y -
F
( m 1 ) (C DS) F ( ~ ) (XF) 2
F
- g siny - ( m ~ ) (CDS)A ( ~ ) (XA)2
( 1)
(2)
The subscripts F and A apply to the forward or towing and aft
or deployed bodies, respectively. Therefore, relative motion aft, "R'
of the deployed body is defined as follows:
x = x - x
R f A
( 3)
in which case the gravity term is non-effective.
Since an explicit solution to the double integration of Equation
(3) is not possible, Equations (1) and (2) can be independently integrated
in terms of distance (relative to original fixed reference system). The
resultant equation for either body is as follows:
1
x = - In (1 + K x t)
K 0
( 4)
where
Since initially both bodies were at an identical velocity, x
o
' just prior to
separation and upon separating a known distance, xR' the time to deploy
can be defined:
Implicit solution of the above equation was accomplished by
graphical means, recognizing the following end condition:
Deployment time from a variety of initial conditions can now
be determined not only for the drag chute in the present case but for the
wing in subsequent subsections.
4-10
4-11
Utilizing the preceding analytical techniques, drag chute de-
ployment time was calculated as a function of altitude for the nominal
re-entry trajectory. In general, the time intervals approximate 0.70
sec. during which period loss in altitude, assuming zero command mod-
ule acceleration, varied from 240 ft. at 40, 000 ft. altitude to 121 ft. at
sea level.
4.1.3.2 Drag Chute Inflation - The loss in altitude during drag chute
inflation to a reefed condition was computed on the basis of the following
empirically derived filling time equation:
4D
t =
f V 0.9
, sec. (7)
The applicable value for the D-term in the above equation is
the reefed diameter of 2.8 ft.2 (corresponds to O. 10 (CDS) max.). These
second incremental values of time varied from 12 to 88 milli-sec. and
produced altitude losses of 4 to 17 feet from initial altitudes of 40,000 ft.
to sea level, respectively. Since drag chute disreefing and subsequent
deceleration occurs concurrently with the pressurization phase of the
wing tubular members, no additional computations are necessary. More-
over, wing deployment loads predominate drag chute developed loads.
However, in other subsections the use will be substantiated of a 14-foot
diameter chute, initially reefed for 2 seconds, to decelerate the command
module within a time interval commensurate with the time to pressurize
the tubular wing members.
4.1. 3. 3 Parawing Deployment - Solution to the previously derived
equations for two separating bodies is also applicable in determining
parawing deployment time. However, the K factor previously defined
represents a constant drag/weight ratio. To approximate some variation
of this term during wing deployment, only 75% of the total wing weight
was assumed together with the maximum drag area, (CDS) = 18.15 ft.
2
,
for the reefed chute-reefed wing configuration. Furthermore, the maxi-
mum separating distance, (XW
max
. was assumed as 30 feet plus an
antiCipated snubber length of 6 feet.
Calculated deployment time averaged 0.70 seconds, with
corresponding altitude losses of 270 to 143 feet from initial altitudes of
40,000 feet and sea level, respectively. It is now possible to substantiate
the adequacy of the 2-second reefed drag chute interval in providing time
for the wing to become fully deployed. Disreefing the drag chute sooner
would impose excessive snatch loads at the forward wing fittings.
Upon completion of wing deployment, a dynamic or snatch
load arises from the acceleration, forward, of a deployed body to the
velocity of the forward towing body. It is necessary, therefore, to deter-
mine the relative velocity of the wing at the on-set of the interacted load.
This velocity can be derived by considering the differentiation of Equa-
tion (4).
x
o
x =
R 1 + KF *0 td
x
o
( 8)
Utilizing previously determined wing deployment time, td ,
solution of the foregoing equation is graphically summarized in Figure
4.5. A reasonable upper limit therefore of 100 ft/sec. corresponds to a
kinetic energy level which must be absorbed through cable elongation.
Assuming the total energy to be absorbed by the snubbing lines, the re-
quired strength and length line can be established as follows:
or
! T (0.35 1.)
2 max
2
T 1. = rnA ()L) /0.35
max .l{
=
244
32.2
/0.35
== 216,500 ft. Ibs.
(9)
The above figure of 216,500 ft. lbs. corresponds, for the
originally assumed 6 ft. snub line (each), to a limit load of 18,000 lbs.
(each). Within reasonable accuracy, however, this can be reduced 50%
by doubling the lengths of each snubbing line.
4.1. 3. 4 Drag Chute Disreefing - Upon disreefing the drag chute, the
required terminal velocity is dictated by a limit 7 g shock load produced
by wing inflation. The equivalent dynamic pressure was determined on
the basis of wing projected area at A = 75 and corresponding drag co-
efficient of 1. 2. To account for momentum effects of the enveloped air
mass, a conservative shock factor of k = 2 was incorporated. Algebra-
ically this becomes:
4-12
40
30
E--4
~
t:t)
V
0
.-I
I
I'zl
20
~
I
P
E-4
....
~
<
10
J
o
/
o 20 40 60 80 100
SEPARATION VELOCITY - FT. /SEC.
Figure 4.5 Separation Velocity During Wing Deployment
4-13
n (W/S) COS 55 1
qlimit
=
CD
COS 75 k
7 (5) COS Q5 1
-
1.2 COS 75 2
2
= 32.25 lbs/ft.
Therefore, the required drag area, CDS, of the parachute is:
CDS = W - (c s)
ql""t D capsule
1m1
- 290 - 141.9 - 18.15
130 ft.
2
- (c s)
D reefed
wmg
(10)
( 11)
Assuming a Ribless Guide Surface canopy having a CD = 0.85,
nominal diameter was determined as follows:
14.0 ft.
130
.85
(12)
Disreefing of the drag chute shall occur as soon as possible
after complete wing deployment, or following a reefed interval of approx-
imately 2 seconds. The ensuing deceleration, concurrent with wing
member(s) pressurizi:ltion period, avoids additional sequence time and
associated altitude losses.
Considering average speeds relative to the nominal re-entry
profile and g - limiting equilibrium ( 'Y = - 9 OJ speeds (165/ Va ft/ sec. ) ,
deceleration intervals and corresponding loss in altitude w e r ~ determined.
From an altitude of 40,000 ft. approximately 6 seconds is required to
attain equilibrium speed, during which time 2800 ft. of altitude was lost.
Since an 8 second interval has been estimated as the pres-
surization period, the intended sequencing technique is acceptable.
4. 1. 3. 5 Parawing Disreefing - Following disreefing of the wing, a
pull-up maneuver results. The rate of change of flight path angle can be
determined from the following expression:
4-15
mV..y L - W COS 'Y (13)
or 'Y = rad/sec
AV
Assuming an average speed relative to the initial speed (Ve = 165//<7 )
and the equilibrium LID - max. speed (Ve = 91. 5/';-;), time to complete
a 1. 8 g maneuver becomes:
t
11" 12
'Y AV
= 3.45/fo, sec
Similarly, loss in altitude can be computed as follows:
h =
( ~ )
'Y AV
= 2011 JU, feet
(14)
( 15)
The foregoing equations were evaluated at various altitudes
and an overall comparison, made with preceding intervals determined in
previous subsections, is summarized in Figures 4.6 and 4.7. Notable is
the ability to complete the sequence in a period of 7. 5 seconds from a
minimum altitude of 1100 feet.
4.1. 4 Deployment Sequencing, Loads, and Performance - Single
Stage System - The following sections treat in detail the deployment of
the single stage system.
Since the parawing shall be initially reefed to a state resem-
bling a parachute, deployment shall be made by use of a deployment bag,
and small extraction chute. The chute shall be secured to the deployment
bag, and by means of a break cord it shall separate, together with the
bag, from the reefed wing following complete wing suspension linel canopy
extension when deployed.
A Rib1ess Guide Surface parachute shall be employed to ex-
tract the wing and will be of sufficient size to support the wing weight at
a dynamiC pressure of approximately 20 lbs. 1ft. 2. Therefore, size re-
quired is as follows:
joj::o..
I
I-'
0;,
E-1
~
M
0
..-f
r.l
Q
P
E-1
<
RYAN
__ ~ _ 61B105
1 - STAGE SYSTEM
2 - STAGE SYSTEM
40
\. ,n .. ./ \. .., 4
II I. >./ )./ j
II
30m
I I
I I
I
I I
20
10
1 I! ! I
0'
II II
0 2
I ,
\
\
\
I I \
4 6 8
NOTE: (INCLUSIVE TO)
CD CHUTE DEPLOYMENT AND INFLATION
CD WING DEPLOYMENT
CD WING INFLATION (REEFED) AND DECELERATION
CD WING INFLATION AND PULL-UP MANEUVER
10 12 14
SEQUENCE TIME - SEC.
Figure 4.6 Deployment Sequence Time vs Altitude of Initiation
H:.-
I
I-'
-;J
.
~
~
C":)
o
~
I
40
30
~ 20
p
~
1-1
~
H
10
0
II
I:
0
RYAN
__ iii. 61BI05
I
I
I
,; I ,
5 10
II
- - - - 1 - STAGE SYSTEM
---- 2 - STAGE SYSTEM
NOTE: (INCLUSIVE TO)
CD CHUTE DEPLOYMENT AND INFLATION
0WING DEPLOYMENT
G)WING INFLATION (REEFED) AND DECELERATION
0WING INFLATION AND PULL-UP MANEUVER
15 20
ALTITUDE LOSS - 10
2
FT.
25 30 35
Figure 4.7 Altitude Loss During Deployment Sequencing VB Altitude of Initiation
4-18
D (16)
= 5.0 ft.
During deployment since snatch loads will be no greater than
previously shown for the two-stage system, analyses are not required.
The initial opening shock can be determined by consideration
of the following equation of motion:
x = - gsin 'Y - [(CDS)F + (CDS) A] (!,> ( ~ ) ( i e )
2
(17)
Assuming:
or
(IS)
The term (CDS)A represents the instantaneous drag area of
the reefed wing or effective parachute. Assuming a linear variation of
(CDS>A with time up to attaining the maximum value, the velocity, xl'
where complete inflation and maximum load development occur, is as
follows from integration of Equation IS.
X
xl
0
=
[ (C
D
S)A
1
2
- (CDS)A
o
]
x
1
P
0
1 +
m 2
t
f
(19)
where
t
f
SD
_P-
=
(x )
0.9
Po
0
(20)
Therefore, since opening shock F 0' is equal to F1 k where
k is a shock factor to account for momentum of the entrapped air, it
follows:
F
(CDS) Al k 71 ( ~ ) (*0) 2
0
(21)
where
I
] 2
71
[1 +
I
2(B
I
-B
o
)
(22)
and B
2m
(CDS) A P *0
t
f
(23)
Equation 21 was evaluated to establish maximum opening
shock and was found to produce loads greater than the established 7 g
structural limit. Additional reefing of the parachute (reefed wing) would
assuredly provide a satisfactory load reduction, and when accomplished
under optimum conditions, results in a balance, ordinarily desired, be-
tween reefed open and full open shock. However, physical limitations of
the existing suspension geometry would result in an abstract canopy geom-
etry and questionable operation thereof, if as a parachute, extensive
additional reefing is incorporated. A minimum 25 foot reefed diameter
was, in view of the foregoing, found satisfactory and opening shock re-
evahlated.
In the analytical treatment of opening dynamics, the reefed
wing (effectively a parachute) was assumed representative by a flat cir-
cular parachute having a diameter corresponding to an inscribed circle
in the wing's constructed (flat) plan form. This diameter approximates
42 feet. The associated drag coefficient is 0.75. Therefore, reefed
open shock computations apply to a reefed diameter ratio 25/(0.7) (42) or
0.85 and corresponding drag area ratio of 0.83.
Since maximum opening shock is greater at altitude (inverse
proportionality of tf with altitude) for identical dynamic pressures at sea
level, a 40,000 ft. re-entry condition was considered. At this altitude
V = 420 ft/sec. and q = 51. 7 lbs/ft.2.
The computations follow:
F (0.83(1040)(1.4)(51.7)
o
62,500 71 lbs.
4-19
4-20
where
~ 2 5 / 0 . 70} (0.2471)
t
f
(420)
0.9
= 0.307 sec.
Since
A = 13.8
x = 0.930
and F /W -- )/ 00
(0.930) (62,500 10,0
o
5.82 g's
Loss of altitude during inflation is approximated on the basis
of Xo ~ constant. Therefore:
llh = 134 ft.
Equilibrium speed, in the reefed state, is approximately
200 ft/sec. at 40,000 feet. To decelerate to this speed would require
2.2 seconds during which time the eM would lose 1150 feet of altitude.
Similar to the above, opening shock at sea level was computed
as 2.9 g's. Also, ensuing trajectory time and altitude loss was calculat-
ed and is compared with the two-stage system, summarized in Figures
4.6 and 4.7.
SECTION 4.2
GLIDE PERFORMANCE AND AERODYNAMIC CHARACTERISTICS
The longitudinal aerodynamic characteristics of the proposed
landing system are based on Ryan conducted wind tunnel tests of the pro-
posed flexible wing, and on unpublished NASA flexible wing wind-tunnel
data obtained from the Langley Research Center, 7 x 10 Ft. Tunnels
Branch. Variable sweep wing aerodynamic estimates have been made
using a procedure which considers balancing the aerodynamic forces
tending to decrease sweep angle with the forces from the suspended load.
The development of the method along with examples of application are
shown in the AppendiX. Differences in the full-scale wing and the wind
tunnel models required corrections to the longitudinal data obtained from
the model tests. The NASA drag data were corrected for removal of the
spreader bar which extended laterally between the leading edges. Cor-
rections for differences in leading edge and keel diameters were based on
a comparison of the NASA test data for member diameter to length ratios
of .015 and .07.
The longitudinal characteristics of the complete recovery
system were obtained by a summation of the individual contributions of
the wing, command module and suspension lines. Figure 4.8 presents
lift and drag coefficients for the complete landing system with the vari-
able sweep wing. Figure 4.9 presents the leading edge sweep angle and
lift to drag ratio as a function of angle of attack.
The sweep angles were determined by considerations of the
hinge moments about the wing apex. The sweep angle assumed by the
leading edge occurs where the sum of apex hinge moments due to aero-
dynamic, structural, and suspension loads is zero.
The wing considered here for the Apollo Landing System has
a flatplan sweep of 55. This flatplan was chosen after consideration of
test data for flatplan sweeps of 35, 45, and 55. The 55 wing demon-
strates superior lift to drag ratios and a greater range of angles of
attack over which aerodynamic spreading moments were obtained. Veri-
fication of the 55 flatplan sweep lift and drag characteristics has been
made by Ryan conducted wind tunnel tests. This model, Figure 4.10,
was supported in a manner similar to the Apollo command module geom-
etry, and was tested with zero wing apex hinge moment.
4-21
~
()
...
~
()
I
00
~
Z
~
~
IZ.!
IZ.!
~
0
()
0
-<
~
~
~
~
IZ.!
1-1
~
4-22
.8
.6
.4
.2
0
20
NOTE:
1. COEFFICIENTS ARE BASED ON WING
FLATPLAN AREA OF 2.000 FT2.
30 40 50 60
WING ANGLE OF ATTACK, Cl w - DEGREES
Figure 4.8 Lift and Drag Coefficients vs Wing Angle of Attack
LO
0
P=l
ZI
11(11
0
P4
001";1::1
ClCl
0'
Z
riI
Cl
...
0
<
Cl
0
80
70
60
\
"--
---
NOTE:
1. L/D'S ARE FOR COMP LETE
RECOVERY SYSTEM.
______ ______ ______ ______
20 30 40 50 60
WING ANGLE OF ATTACK, a
w
- DEGREES
Figure 4. 9 Lift to Drag Ratio and Leading Edge Sweep Angle vs
Wing Angle of Attack
4-23
r
Figure 4.10 Wind Tunnel Model - Ryan Flex Wing
4-24
Glide performance with and without winds is presented in
Figures 4.11 through 4. 15. Glide distance and time are given as a func-
tion of altitude at start of glide, and rate of descent and glide velocity are
given as a function of altitude. The effect of various amounts of turn on
still air range is shown in Figure 4. 15 for a load factor of 1. 50 and for
three initial altitudes.
The wind profiles which were considered were those of Cape
Canaveral (which have a 97% probability of not being exceeded), and
Southern Texas winter winds (which have a 99% probability of not being
exceeded). The glide data with winds are intended to show limits of glide
performance as dictated by these extreme wind velocities. Glide perform-
ance with lesser winds will fall between the still air performance and
the performance with winds, depending on the wind velocities and direc-
tions during any particular day.
Figure 4. 16 presents the two wind profiles. It is seen that
the velocities as functions of altitude are almost the same. Calculations
have indicated that the performance with either of these profiles was
essentially identical; therefore, one set of performance data is presented
as being representative of both wind conditions.
In still air, maximum range is obtained by flying at maximum
lift to drag ratio; however, with winds aloft, maximum range is no longer
realized at L/Dmax. With headwinds, less time in glide is required with
corresponding increases in rate of descent and decrease in L/D. Maxi-
mizing range with tail winds requires a longer exposure time to the winds,
therefore lowering rates of descent and again deviating from L/Dmax.
The glide performance presented is for maximum range which
requires varying CL with altitude as discussed above. This C
L
schedule
is given in Figure 4. 17 and was obtained by maximizing the expression
for range with respect to C
L
.
The methods used in calculating glide performance are given
in the Appendix.
4-25
fl::..
I
l:\:)
0':>
.
~
~
100
g 80
Oa
...-I
r:tl
Cl
::::t
RYAN
__ mi. 61BI05
C,!) 60 I If 7' I '
~ >
TAILWINDS
o
~
~
00 40 \I / ............. 1
~
r:tl
o
P
~
NOTE:
1. WIND DISTANCES ARE WITH
SOUTHERN TEXAS,
<
20
1 % EXTREME WINTER WINDS
OR CAPE CANAVERAL
97% PROBABILITY WINDS
o
o 10 20 30 40 50 60 70
GLIDE DISTANCE '-NAUTICAL MILES
Figure 4. 11 Glide Distance vs Altitude At Start of Glide
~
I
I:>:)
-1
100
RYAN
__ IT@.. 61B105
NOTE:
1. SOUTHERN TEXAS - 1% EXTREME
WINTER WINDS, OR CAPE CANAVERAL
97% PROBABILITY WINDS.
801 ~
~
~
8 60 I
~ ~ ~ I,'
~
TAILWINDS : ~
p - -I :1"""""1 E-! 40 I _ $
I-!
E-!
H
<
./-- HEADWINDS
I
NO WINDS
20 I ff A "
o <
40 80 120 160 200 240
TRUE AIRSPEED - KNOTS
280
Figure 4.12 Glide Velocity vs Altitude
320 360 400
H::-
I
t\:)
00
~
~
o
o
;}
~
~
t---I
~
~
RYAN
__ !11M. 61B105
1 0 0 - - - - - - - - - - - - - - - - - - - - - - - - - - - - ~ - - - - - - ~ - - - - - - r _ - - - - ~
NOTE:
80
60
1. SOUTIIERN TEXAS - 1% EXTRE:ME
WINTER WINDS, OR CAPE CANAVERAL
97% PROBABILITY WINDS.
TAILWINDS
< 40
,.. HEADWINDS
20
o
o
40 80 120 160 200
240 280
RATE OF DESCENT - FT.jSE C.
Figure 4. 13 Rate of Descent vs Altitude
E-!
~
0
0
q
'r""I
I
~
~
d
~
0
E-!
~
E-!
00
~
~ .
P
E-!
J-004
E-!
~
<
4-29
NOTE;
1. SOUTHERN TEXAS - 1% EXTREME
WINTER WINDS, OR CAPE CANAVERAL
97% PROBABIlJTY WINDS.
1 0 0 r - - - - - - - ~ - - - - - - ~ - - - - - - - - - ~ - - - - - - ~ - - - - - - - - - - ~ - - - - - - - - - ~
80
60
40
20
o
o 4 8 12 16 20 24
TIME TO DESCEND - lVIINUTES
Figure 4.14 Time to Descend vs Altitude at Start of Glide
NOTE:
1. NO WIND.
2. 1. 50g TURN.
3. ALTITUDE AT START
OF TURN AS NOTED
40+---/
30
40..L.---
180
0
Figure 4. 15 Range Envelope
4-30
4-31
100
80
SOUTHERN TEXAS WINTER WINDS
99% PROBABILITY lEVEL
IDEALIZED WIND PROFILE
t: 97% PROBABILITY LEVEL
g 60 CAPE CANAVERAL, FLA.
0..
I
---
--
---
40
-<
20
o
40 60 80 100 120 140 160 180 200 220 240 260
WIND VELOCITY - FT./SEC.
Figure 4.16 Southern Texas Winter Winds, 99% Probability Level and Cape
Canaveral Idealized Wind Profile. 97(frJ Probability Level,
Cape Canaveral, Florida
~
I
~
~
~
I"z.t
0
0
0.
1""'1
riI
Q
::>
E-t
1-4
E-t
~
<
RYAN
__ lIB. 61BI05
100
80
NOTE:
SOUTHERN TEXAS - 1% EXTREME WINTER WINDS,
OR CAPE CANAVERAL 97% PROBABILITY WINDS.
60
/
'"
~
40
V
1\ TAILWINDS
/
HEADWINDS
1
NO WINDS
20
J
o -
~ ~ ---
o .1 .2 .3 .4 .5 .6
C
L
Figure 4 .. 17 C
L
Schedule for Maximum Glide Range
~
.7
4-33
SECTION 4.3
LANDING FLARE ANALYSIS
A longitudinal 3 degree of freedom analog computer study
determined the capsule-paraglider system dynamic characteristics dur-
ing landing simulations. The equations of motion, notations, and wiring
diagrams used in the simulation are shown in the Appendix of this Report.
The analog studies used a wing of 55 flatplan sweep-back,
with the capsule suspended at .75 keel chord below the wing. Capsule
incidence, measured from a line parallel to the keel centerline, was 65 .
Capsule incidence was treated as a constant angle. Wing and geometry
is the same as that proposed in Figure 3.1. Center of gravity travel was
limited to approximately 4.5 feet, since this is about the practical limit
available in the proposed design.
Several pilot control and cockpit display schemes have been
evaluated in a study of the use of the paraglider wing as a landing system.
For the Apollo application, an integrated system conSisting of a manual
proportional and an automatic system is proposed.
The ability of the pilot to manually perform the landing flare
is solely dependent on the visual references provided him in the way of
direct visibility and cockpit instrumentation. The basiC cockpit instru-
mentation used for this maneuver consists of an airspeed indicator, altim-
eter, and rate of descent indicator. A typical time history of a landing
flare obtained from the simulation studies of the Apollo landing system
where manual control and the above instruments were used is shown in
Figure 4. 18.
In general, it was found that a pilot when using only the basic
flight instruments could consistently make landing flares with touchdowns
of 10 feet per second or less, with flight path velocities between 55 and 80
feet per second, provided that the flare was started with at least 140 feet
per second initial velocity. Landings from glide path velocities of 110 to
125 feet per second became increasingly difficult as there is much less
energy available for the flare, and the landing maneuver is made at high
drag angles of attack. The slight gain in flight path angle, using veloci-
ties near L/Dmax., is difficult to realize when the flare must be ini-
tiated at altitudes nearer the ground. In the case of the minimal glide
velOCities, flares had to be initiated at altitudes of 150 feet, and below,
in order to reach acceptable descent rates at touchdown.
It:)
0
1""'1
r:Q
.....
to
ZI
iii
~ I
0
-2
V
50 0
n
Jl
FT/SEC 100
(g'S)
+2
150
+4
200 +6
0
R,
8
8 (J
(FT)
16
(DEG)
0
24
-20
40
0
Ii
-20
(J
FT/SEC
DEG/SEC
0
-40
-20
-60
60
a
40
"
w
(DE G)
(DE G)
20
-.5
(TYP.)
n
X
(g'S)
0
+.5
+ 1.0
Figure 4.18 Time History of a Typical Landing Flare Using Altitude
and Airspeed as Reference
4-34
4-35
A descent error indicator, with a manual proportional con-
trol system, was investigated. This instrument provides the pilot with
an indication of his rate of descent as compared to an optimum rate of
descent. The information is supplied in the form of an error indicator
similar to the type used for the glide slope portion on a conventional In-
strument Landing System presentation. A typical landing flare using this
type of system is shown in Figure 4. 19. The error signal or indication
is produced through a small electronic unit, which compares descent
rate with altitude, and produces a flight path describing an exponential
curve from altitudes near 250 feet above ground level. The curve be-
comes tangent to the ground, or any altitude desired slightly above ground
level, producing a near 0 glide slope.
Instrumentation reqUirements for this particular system are
the same as would be required for the manual system, but with the addition
of the error indicating device. Typically, rates of descent may be more
closely controlled with this type. of device than may be done with only
altitude and airspeed as references. Descent rates of 4 to 8 feet per
second or less, and glide path velocities of 55 to 65 feet per second were
quite common in the studies.
The automatic landing system is initiated upon command of
an auto pilot control switching system, which senses altitude and sink-
rate. The automatic landing system block diagram is shown in Figure
4.20. Typical automatic landing flares are shown in Figure 4.21. The
simulation time-histories indicate the system's capability of making
corrections for sink-rate errors during flare. Landings with rates of
descent ranging from 2 to 4 feet per second with glide velocities between
50 and 65 feet per second were achieved using the automatic landing
system.
The control movement required for the manual system and
the automatic landing system is indicated in Figures 4.18, 4.19 and 4.21.
The maximum rate of movement of the c. g. is required by the automatic
landing system. Figure 4.21 shows that the maximum rate of c. g. move-
ment does not exceed 3 ftl sec.
A complete description of the automatic landing system is
contained in the Appendix.
V
(FT/SEC)
.tS
(FT)
Ii
FT/SEC
" (DE G)
Ll':)
0
.-f
t=Q n
.-f x
CO
(g'S)
2.
c(1i
~ I
0
50
n
100
l!
(g'S)
+2
150
200
0
8
(j
16
(DE G)
-20
40
0
-20
iJ
DE G/SEC
0
-40
-20
-60
60
0
O/.w
-20
(DE G)
20
-40
0
-60
-1.0
5 SECONDS
(TYP.)
-.5
0
+.5
+ 1.0
Figure 4 .. 19 Time History of Typical Landing Flare Using an Error
Indicato r . Instrument
4-36
H::>-
I
~
~
PILOT
STICK
INPUT
RYAN
___ 61BI05
() +
6 STICK
..
c5 i
.. SERVO I ~ I
"1
K. (1i -Ii ) '" ().
h D CMD lerr
PARA-GLIDER I h ~ I DOPPLER I
hD
li WING-BODY W-.I RADAR I
D
SYSTEM
1----
AUTOMA TIC LANDING
CONTROL SYSTEM
- - -.- -'1
I
I
I
+
..
+
.....
Kn liD
r l ~ _____ =U-
.1.--
I
I
I
I
li
~ CMD
I
SINK-RATE
COMMAND
-li
CMD
'" ~ h D
I ~ I
. T.
I r---;--,----J,LJ
I
I
I
I
I
I
I
I
I
I
I
I
I
~ () 1
9+
:r t CMD
I () 2
I .1. CMD
I I
e.g. RATE
COMMAND
I I
I I
I I
COMMAND CONTROL SWITCHING
I I
I I
I I
I I
L_I
I
I
I
I
.....
...
L________ _ ________ _
Figure 4.20 Paraglider Manual and Automatic Landing Control System Block Diagram
I
I
I
I
I
I
I
__ ..J
0 -2
50 0
'1
V
I!!
(FT/SEC)
100
(g's)
+2
150 +4
200 +6
60
0
40
8
s
fJ
20
(FT)
16
(DEG)
0
-20
40
0
.. 20
Ii
-20
()
(FT/SEC) DEG/SEC
0
-40
-20
-60
-40
60
0
"
Q!w
40
(DEG)
-20
(DEG)
-40
-60
-1. 0
TOUCHDOWN
-.5
n
x
(g's)
0
+.5
+ 1.0
Figure 4.21 Time History of a Typical Automatic Landing Flare
4-38
SECTION 4.4
COMMAND CONTROL SYSTEM
A schematic of the command control system is shown in Fig-
ure 4.20. The automatic landing flare system is shown enclosed within
dashed lines in the lower portion of the drawing, and is regarded as the
primary pitch command in the landing flare. This system is designed to
satisfy the requirements for safely landing the vehicle following a visual
or instrument let-down. The requirement for the automatic landing sys-
tem as the basic system has been based on consideration of the difficulty
in landing over water and during conditions of low visibility. The high
rates of descent and the associated high rotational requirements during
flare also make an automatic system desirable. The poor visibility avail-
able to the pilot and the possibility of an incapacitated crew, also makes
this system necessary. A manual backup system may be engaged by the
crew upon switching out the automatic system. It has been shown that
very satisfactory landings may be made through visual reference to the
descent error indicator.
As shown in the schematic, Doppler sensing elements provide
the backbone of the automatic flare system. Switching of the simple ele-
ments of this system is accomplished using a switching control network
which operates as a function of the output of the altitude sensor. This
network engages the automatic flare system and actuates the required
changes in automatic system functions which occur during the latter
stages of the flare maneuver.
The manual and the automatic landing flare systems utilize
the same hydraulic servo actuators. Based on study of the control re-
quirements in the landing maneuver, a proportional control system has
been provided.
Lateral control is manual. The command system is duplicated
throughout, to furnish the required level of reliability.
4-39
4-40
SECTION 4.5
CONTROL ACUTATION POWER REQUIREMENTS
To assure proper control of the capsule during the period of
gliding flight and during the landing flare, sufficient control power must
be available to rapidly shift the position of the c. g. Precise manage-
ment of the vehicle energy is required throughout the landing flare, as
during this maneuver maximum demands will be made on the control
system.
The control system power requirements were determined
from the necessary vehicle response during the flare. Analog simulations
of the flare time history for the flexible wing configuration indicate wing
angle of attack rotational requirements of 2.0 to 10.0 deg/sec. The
energy to complete a full movement of the pitch control is about 13, 000
ft. -lbs. The power required for proper pitch response during the flare
is approximately 12 horsepower.
The pitch control power requirements during the glide are
not as great as during the flare. Very few pitch control movements are
anticipated during this portion of the flight. Ample pitch response is
provided with about 3. 0 horsepower.
An estimate of the roll control requirements indicates that
3.0 horsepower will provide sufficient vehicle response. About 2500 ft.
lbs. of energy are necessary for maximum displacement of the roll con-
trol. Three horsepower allows full control deflection in about 1. 7
seconds.
SECTION 4.6
LONGITUDINAL STATIC STABILITY AND CONTROL
TABLE OF CONTENTS
Section Page
4.6.1 Suspension System 4-42
4.6.2 Static Stability and Trim Requirements 4-42
4-41
4-42
SECTION 4.6
LONGITUDINAL STATIC STABILITY AND CONTROL
4
0
6.1 Suspension System - The Command Module suspension sys-
tem, in combination with the control system, has been selected to satisfy
the following overall requirements:
(1) Secure desired deployed wing arrangement
(2) Sustain deployment loads
(3) Permit wing repositioning to the flying attitude
(4) Provide stability of the Command Module from sus-
pension aspects
(5) Insure stability of complete system in flight while
providing minimum maneuvering control actuation
requirements
(6) Provide desired Command Module attitude for proper
orientation during landing
For the proposed landing system, in the longitudinal frame,
a high degree of stability of the suspended load is assured through the use
of a truss-type suspension line arrangement. The geometry used pro-
vides a high degree of fixity in reducing pendulum effects due to thrusting
disturbances. The proposed system also features' a suspension control
system design which satisfies the Command Module longitudinal posi-
tioning and orientation requirements.
4.6.2 Static Stability and Trim Requirements - The Command
Module center of gravity positioning requirements to accomplish longi-
tudinal trim are given in terms of the wing coordinate system in Figure
4.22. The system trim requirements are given superimposed on the re-
quirements for trim for body positions at a constant normal distance from
the wing. Thus, the geometrical change in normal location arising from
control arm positioning is shown. Since aft c. g. movement is, in all
cases, required to achieve trim at a higher angle of attack, the figure
serves to illustrate the statically stable system. Based on the figure, a
center of gravity change of 4. 5 feet is required for a change of trim
angle of attack from 27.5
0
to 50
0
9
C)
K
~ ~
,......
E-4
.8
,......
00
0
III
....:I
<
~
.7
p
E-4
S
S
~
.6
....:I
P
00
~
C)
.5
o
NOTE:
SUSPENSION GEOMETRY
ZATT/C =.75,
WING
Y ATTIc =. 06C, (J =0 --CAPSULE C. G
VIEW OF PLANE OF SYMMETRY
--
I
APOLLO LANDING
. 8 ~
V SYSTEM
-
/
--
-
~
-
. ~ 1\\ I'
.75
\0
z/c
10
20 30 40 50 60
ANGLE OF ATTACK, DEG.
Figure 4.22 Apollo Landing System Longitudinal Trim Requirements
Spacecraft Center of Gravity Location vs Angle of Attack
4-43
4-44
The longitudinal trim-position requirements were obtained
through the use of the following equation:
C
cm
-=
c
where,
z
z S
S
~ + 1/2 C
..ill.
-C C
cm
c x
S- c
m m
-S-
x
w
=
c=
C =
x
z=
S=
w w c
w
eN + 1/2 C
N
S.f
w
Sw
c. g. position aft of mid-point of keel
keel length
axial force coefficient ( axial force )
qs
distance below and normal to wing keel
area
D
cm
c
C =
m
pitching moment coefficient ( pitching moment )
qSC
D =
c
diameter
. . normal force
normal force coefflC16nt = S
.q
Subscripts:
w= wing
cm = Command Module
.f = lines
The above represents a moment equation about the Command Module
center of gravity.
Figure 4. 23 presents the static longitudinal aerodynamic
characteristics of the proposed landing system with the center of gravity
located for trim. The data indicate that the system has positive angle of
attack stability throughout the proposed trim range. The curve of C
m
vs. angle of attack, which has been based on estimated aerodynamic d
characteristics as discussed in Section 4.2, is highly non-linear. The
NOTE:
1. SUSPENSION GEOlVJETRY:
ZATT/
C
=.75, Y ATTIC =. 06C, () =0
0
~
~
p::
~
-.1
rI
~
~
r ~
~
~
V
~
u
-.2
..-...
H
U
. ~
U
I
........
Z
C;
~
.2
/
-
V
. 1
o
~
~
E-! -.1
ID
:::I
0
~
...-l
I=Q
-.2
...-l
E-!
CD
t:I.l
o 40 10 50 20 30
ZI
filii
~ I
ANGLE OF ATTACK, DEGREES
Figure 4 .. 23 Apollo Landing System Longitudinal Static Stability
4-45
4-46
data indicate a low stability level at low angles of attack, while a large
margin is shown at moderate angles of attack. At higher angles of attack
a gradual decrease in stability is shown due to the destabilizing influence
of the high wing drag. The static margin (-e
mc
) is, on the other hand,
L
increased in this region due to the nonlinearity of the lift curve slope.
Above the angle of attack corresponding to C
L
the static margin is
max .
negative due to the negative lift curve slope.
SECTION 4.7
LONGITUDINAL DYNAMIC STABILITY
The longitudinal dynamic stability of the proposed landing
system has been investigated using small perturbation analysis tech-
niques and estimated aerodynamic characteristics. A rigid suspension
system has been assumed.
The results of this investigation are shown in Figures 4. 24
and 4.25. Figure 4.24 shows the short period longitudinal oscillatory
characteristics, determined for various operating altitudes and angles
of attack. Figure 4.25 shows the corresponding long period oscillatory
characteristics for the same altitudes and angles of attack. Examining
the curves, the effect of altitude change in the oscillatory characteristics
(at a constant angle of attack) is seen to be a decrease in frequency and a
decrease in the damping for the long period oscillation and an increase in
the frequency and a decrease in damping of the short period oscillation.
The effect of angle of attack increase at a constant altitude
is to raise the oscillatory frequency and increase the damping for the
long period oscillation,. and to decrease the frequency and damping for
the short period oscillations.
These studies indicate that the proposed landing system is
very stable in the longitudinal mode throughout the operating envelope.
4-47
4-48
oJZ.4E-1
U
I"il
..... O::g
fI.l
E-IE-I<
OJZ.4E-1
O::g
E-IE-I<
.5
.4
.3
.2
.1
.5
. 4
.3
.2
.1
o
26
a=32
J
I
j/
/i
---
f-""'"
30,000
ALTITUDE
-
60,000
FT.
/'
,/
90,000
.5
.4
.3
.2
.1
0
TIME TO DAMP TO
---- HALF AMPl.JTUDE
---- FREQUENCY
I I
.5
\
ALT. = 90,000 FT.
.
\
.4
\
"'
'-.,
ALT. = SEA LEVEL
...............
......
-
30 34 38 42 46
ANGLE OF ATTACK DEG.
Figure 4.24 Longitudinal Oscillatory Characteristics Short Period
>c
u
z
d
I"il
I.Q
0
p:)
CD
ZI
filii
J:l
0 0
U
riI
E-4E-4 00
___ TIME TO DAMP TO
HALF AMPLITUDE
- - - FREQUENCY
30 r-----------.------------.-----------,.3
20
10 __
--
--
-
o L.-_____ -L.. ______ .l.... _____ -' 0
o 30,000 60,000 90,000
ALTITUDE FT.
30
20
SEA LEVEL
I
90,000 FT.
10
/
--
I
/
0
26 30 34 38 42
ANGLE OF ATTACK DEG.
.3
.2
.1
0
46
. Figure 4 .. 25 Longitudinal Oscillatory Characteristics Long Period
U
z
J:lU
pJ:l
a
oo
J:ld
4-49
4-50
SECTION 4.8
LATERAL STABILITY AND CONTROL
The lateral stability of the suspended body below the para-
glider wing, and of the complete system, are determined by the method
of attachment of the suspension lines to the body, and the floating or
balancing characteristics of the flexible wing structure. The character-
istic increase in restoring normal hinge moment of the leading edge
member due to a downward displacement assures satisfactory internal
or suspension stability of the body with the highly stabilizing line attach-
ment geometry.
The method of determining feasibility of lateral control was
developed from a study of unpublished NASA data, and is presented in
the Appendix.
Lateral control is obtained by shifting the c. g. in the lateral
direction. Two control arms mounted fore and aft on the capsule pro-
vide this motion. The arms are attached near the base of the capsule
and rotate in the pitch plane giving longitudinal control. Mounted laterally
on these pitch control arms are members which form aT. Displacement
of these lateral arms provides the c. g. shift necessary for lateral
control.
Figure 4.26 illustrates the effect of lateral attach distance
(Yat
t
) on LID, and wing sweep variation. Greater LID's and a wider
angle of attack range are obtained with greater Yatt indicating the desir-
ability of longer lateral attach arms. Longer arms also allow greater
control displacement and thus a greater range of c. g. shift.
The lateral attach distance of the Apollo system proposed
here is regarded as a practical limit considering capsule geometry.
Additional lateral arm length would require a complex extension system.
Yatt/C of the proposed system is 0.062. This gives adequate control
deflection, reasonable LID's, and a reasonable angle of attack range.
Lateral control effectiveness has been evaluated for the glide
condition at LID max. This data is shown in Figure 4.27 as acceleration
in roll in terms of angular displacement of the lateral control arms, and
shows that for the maximum displacement of 15
0
, a roll acceleration
capability of .35 rad/sec
2
is provided.
~
~
~
r:t:I
~ ~
~ ~
8r:s
r:t:I
~
~
~
~
80
70
2
NOTE:
,
FLAT PLAN SWEEP ANGLE = 55 1.
60
2. LID IS FOR WING ONLY.
3. CURVE
Y
ATT
9
ZATT
c
c
1 0 0 0.75
4 2 0.1 0 0.75
3 ~ - - - - - - + - - - - - - - ~ - - ~ - - ~ - - ~ ~ - - ~ - - - - - - + - - - - - - - ~
2
1 ~ - - - - - - + - - - - - - - ~ - - - - - - - + - - - - - - - - ~ - - - - - - + - - - - - - - ~
o ~ - - - - - - ~ - - - - - - ~ - - - - - - ~ - - - - - - - - - - - - - - - - ~ - - - - - - ~
o 10 20 30 40 50 60
WING ANGLE OF ATTACK - DEGREES
Figure 4.26 Effect of Lateral Attach Distance (Y A 6'T) on Leading Edge Sweep
Angle and Lift to Drag Ratio
4-51
4-52
.4
.3
ANGULAR
ACCELERATION, .2
RAD,lSEC.2
.1
o
1/
V
V
V
o 2 4 6 8
/
V
"
/
V
10 12 14 16
LATERAL CONTROL ARM DISPLACEMENT, DEG.
Figure 4.27 Lateral Control Effectiveness
SECTION 5.0
SYSTEM DESIGN
TABLE OF CONTENTS
Section Page
5.1 Structural Criteria and Loads 5-3
5.2 Wing Description 5-19
5.3 Suspension System 5-31
5.4 Control System 5-33
5.5 Cockpit Display Instrumentation 5-43
5.6 Electrical and Electronic System 5-47
5.7 Structural and Material Testing 5-49
5.8 Deployment System 5-83
5.9 Structural Analysis 5-93
5.10 Weight Analysis 5-101
5.11 Check Out Procedures 5-129
LQ
5.12 Recovery System Reliability 5-131
0
...-!
p:)
...-!
<:r)
ZI
~ i
5-1
ZI
~ i
SECTION 5.0
SYSTEM DESIGN
The following sections describe in some detail the design of the
Apollo landing system. Preliminary estimates of the design require-
ments of loads and structure are discussed first along with descriptions
of the proposed systems. The detailed analysis of the important aspects
of deployment, structure, weights, and system checkout and reliability
are discussed in the later portions of this section.
5-2
5-3
SECTION 5.1
STRUCTURAL CRITERIA AND LOADS
The structural design of the paraglider landing system is
based upon the loads developed during the recovery operation. In
addition to the loading requirements, consideration must be given to the
problems of packaging, exposure temperature, deployment, etc. The
design constraints on the wing construction are determined from the
operating environment and re-entry body design limitations. These
constraints are:
1. The wing will be exposed to long durations of space
flight.
2. Packaging of the wing, suspension system, and control
power units must be confined to a volume of not more
than 26.0 cubic feet.
3. Packaging temperature should not exceed 250
0
F.
4. "Fail safe" techniques shall be employed for purposes 0
safety .
5. The weight of the recovery system shall be kept to a
minimum.
6. The wing construction shall allow for folding consistent
with sound deployment procedures.
The critical load factor experienced by the recovery system
occurs during the deployment sequence. The system shall be designed
for the following conditions during deployment.
Total weight 10,000 lbs.
Command module weight 8,700lbs.
Design limit load factor 7.0
Ultimate factor of safety 1.5
The deployment of the wing shall be sequenced by staging of
the wing, parachutes, and/or reefing in such a way that the design
recovery load factor is not exceeded. All altitude/velocity combinations
resulting from re-entry trajectories, equilibrium descent, and abort
conditions shall be analyzed for critical loading. Initiation of deployment
at a Mach number greater than 1. 0 need not be considered.
The maneuvering loads imposed upon the spacecraft during
glide and flare are quite small. High load maneuvers during the glide
are not anticipated"and the time histories of the flare maneuver indicate
a maximum load factor of 1.7 (See Figure 4.21). The glide phase of the
flight will consist of a straight glide and/or shallow turns as required to
position the vehicle over an intended landing site. For a normal flight,
load factors larger than 1.5 are not expected. Time history studies of
the landing flare maneuver have indicated maximum load factors between
1.3 and 1.7. The higher load factor resulted from a flare maneuver per-
formed by an automatic system.
The effects of a gust attack upon the vehicle is also expected
to result in low loadings. Because of its extreme flexibility, the wing is
expected to act as a gust alleviator. In addition, the long nylon suspen-
sion cables will absorb some of the shock of a gust load on the wing.
For glide at maximum L/D, a gust attack equivalent to a sharp-edged
gust velocity of 30.0 ft/sec results in a load factor of 2.1.
a 0
L/D max
o
-1 1
'Y = tan L/D
= 32.0
= 2.40
= .422
.176
C
L
cos 'Y + CD sin 'Y = .458
S 2000 Ft
2
5-4
5-5
Wgt. 10,0001bs.
2
= = C
R
(p/2)V 0
V
= 95.2 ft/sec @ S. L.
0
KU
= sharp-edged gust velocity
=
30.0 ft/sec
-l(K U)
17.5
0
= tan fV) =
0
OLg
=
OLO + 6a = 49.5
0
2 2
99.8 ft/sec V = Vo - (KU)
=
g
C
R
=
.899
g
n
=
C R (p/2) V 2S/ W
=
2.1 gls
g
g g
The value of KU = 30 ft/sec may prove to be somewhat conservative due
to the expected low value of the gust alleviation factor, K.
Flight at lower angles of attack, and consequently higher
velocities, will result in higher gust load factors for the same value of
KU. However, because of the danger of wing closure at smaller angles
of attack, higher flight speeds are not anticipated. A higher rate of
descent may be required just prior to the landing flare, but because of
the proximity of the ground, the chance of encountering a gust velocity
with a KU value of 30.0 is remote.
In view of the above discussion, the following structural
design criteria are established for the glide and flare portions of the
recovery operation:
Total weight
Command module weight
Design limit load factor
Ultimate factor of safety
10,000 lbs.
8,700 lbs.
2.0
1.5
The landing system and supporting structure must be capable
of supporting the loads which occur at touchdown. The flare and touch-
down studies (Figures 4.18, 4.19, 4.21) indicate vertical sink velocities
between zero and 8 feet per second. The higher rate results from a
flare with reference only to altitude/airspeed/rate of sink instruments.
Since a landing without use of the two principal systems (automatic and
manual proportional) will be considered an emergency situation, the
structure will be designed for the loadings resulting from the following
touchdown velocities:
Vertical rate of sink 10 ft/sec
Horizontal velocity 70-80 ft/sec
An analysis of the loading upon the major components of the
recovery system has been made to provide preliminary design data. The
analysis has been divided into two parts; (1) deployment loads, and (2)
loads during glide and flare.
Two possible deployment schemes are currently under con-
sideration. In both cases, the major deceleration of the vehicle is
accomplished by deployment of the wing. In one case the wing is de-
ployed in the glide configuration, and in the other case the wing is
deployed into a parachute configuration.
Deployment of the wing in the glide configuration results in a
momentary wing angle of attack of about 90. The data available from
the wind tunnel pressure tests of a model simulating a flexible wing has
been analyzed for the loading distribution upon the wing structural
members. Figure 5.1 shows the estimated load distribution on the keel
and leading edges due to the membrane load for two sweepback angles.
A further discussion of wing pressure data is given in the Appendix.
The load distribution on the leading edges and the keel is practically
identical so each of the curves are valid for all three members. The
curves show the loading distribution for the two sweepback angles to be
very similar and both approach a triangular distribution. The variation,
with sweepback angle, of the c.p. location, percent wing load on keel,
and centroid of airload on the structural members, is shown in Figure
5.2. These parameters are shown to be essentially constant for the
range of sweepback angle shown, at 90 angle of attack. The data also
shows that the keel supports 50% of the wing load, and each leading edge
carries 25%.
5-6
90 FLAT PLANFORM APEX ANGLE
LEADING EDGE SWEEPBACK
1.8
x
1.6
1.4
1.2
o
.2 .4 .6 .8 1.0
Figure 5. 1 Keel and Leading Edge Membrane Load Distribution
5-7
55
% TOTAL WING 50
LOAD ON KEEL
45
40
SPANWISE LOCATION
OF CP 35
(% SEMISPAN)
CHORDWISE
LOCATION
OF CP
(% KEEL LENGTH)
CENTROID OF
AIR LOAD ON KEE L
AND LEADING EDGES
(% LENGTH OF
MEMBER)
30
65
60
55
70
65
60
a = 90
ALE =45 (FLAT)
LGEOMETRIC CENTROID
_ ch .(.) __
\:J ~
~ ~ ~ M E T R I C ICENTROID
. "'" --(.' .(:)
-
~
GEOMETRIC
CENTROID
---
=:Li GEOMETRIC CENTROID
7.:
KEEL
--
-
-, ....
LEADrG EDGE
30 40 50 60 70
LEADING EDGE SWEEPBACK ANGLE - DEG.
Figure 502 Wing Airload Characteristics
5-8
By assuming a triangular distribution of load on the three
members, a solution to the loading in the members and suspension
cables was found. The following sketch shows the results for a unit load
factor.
CABLE LOADS (LBS/g)
. __ ._-_ .. _------------------_. ----------..
FWD -_.._-- )
~ - - ~ ~ - - ~ __ - - ~ __ - - ~ - - ~ D
Keel 280 573 1109
Leading Edge 290
271 303
142 163
1153
607
1035
566 639
5-9
The resultant of the loads in the cables which attach to the forward con-
trol arm passes through the wing keel at 27.0% of its length. The
magnitude of this resultant is 1942 lbs/g. The resultant of the load on
the aft control arm passes through the keel at 76.8% length and has a
magnitude of 6875 lbs/g. The maximum predicted bending moments in
the keel and leading edges are 12,700 inch-Ibs/g and 6350 inch-Ibs/g
respectively.
Wing deployment in the parachute configuration results in
essentially uniform loading on the suspension lines in use and on the
control system. This condition results in the critical loads on the
majority of the system. Figures 5.3 and 5.4 show the geometry of the
parachute, lines, and control system, and the internal distribution of
deployment loads as determined from the following analysis.
Parachute Deployment Case - Loading Analysis
Keel length = 59 ft. .75!K = 44.25 ft.
= 531 inches
Total vertical force = 7 x 8700 x 1.5
= 91350 lb. (10.5 g ultimate)
with total vertical force on each forward and rear frame assem-
blies = 45700 lbs. If (J is the angle that the resultant load path on
the forward or rear frame assemblies is inclined to the vertical
ULT. 45,700 LBS ULT.
Ul
--l
04 46"
I
\ II
E-; g
I e,o"'
E-; I 1/
Z CI.2
. <r:lf
;..:\\0
fEtE-;
380"
\
FWD.
\ I
..
\
I
\
I
\
\
t
\
t
\
t
\
I
\
I
91400 LBS. ULT.
I
c.g.
CONTROL ARMS
Figure 5.3 Parachute Geometry and Ultimate Load Distribution
5-10
5-11
16,200 LBS.
\ 15,300 LBS. 15,300 LBS. 15,300 LBS.
a t tl
2, 590 2590 LBS.
FORWARD CONTROL SYSTEM
16,200 LBS.
\
5
f
3
1
0
9
0
0
=L:S. 15'30
1
0
v
LBS' LINES\U;SPsENSION
AFT CONTROL SYSTEM
15,30l LBS.
5400 LBS. 3,800 LBS.
J
"d> 1,900 LBS. CENTER
AT EACH
(;I TIP
C,)
et.i
t:Q
50
,..:j
0
0
..... "
.....
Figure 5.4 Control Systems - Ultimate Internal Loads Parachute Deployment
Then tan e :::: 46/380 :::: . 121
and e is very nearly 7
with resultant load :::: 45700 sec. 7
:::: 46000 lb.
If the vertical component of the load in all cables is constant, then
46000
we can have 3 lb.:::: 15300 lb. at each of the tips and on the
center location of the T bar.
Forward Frame
From geometry in plane of frame (Figure 5.4)
120
tan a :::: -- and a :::: 20
330
Suspension cable load in plane of frame:::: 15300 sec. 20 :::: 16300 lb.
and horizontal compo :::: 15300 tan 20 = 5560 lb.
Control cable load :::: 15300 sec. 11
:::: 15600 lb.
Post
Assuming cable parallel to post
Load :::: 15600 - 7680 = 7920 lb. compression
Arm
Horizontal component of control cable load = 15300 tan IP = 2970 lb.
So load in arm:::: 5560 - 2970 = 2590 lb. tension
Lateral component of keel suspension cable load in fore and aft
direction
50
= 15300 x 333
2300 lb.
Hence for equilibrium, lateral component at each tip:::: 1150 lb.
5-12
5-13
Rear Frame
Post
115
From geometry, tan a = 330 with a approx. 19
by inspection cp is approx. = f) = 7
In plane of frame we get suspension cable load at tip = 15300 sec.
19 = 16200 lb. and horizontal component = 15300 tan 19 = 5300 lb.
Control cable load = 15300 sec. 35 = 18700 lb. tension
Assuming cable is parallel to post, with keel suspension load on
post
Arm
15300
= -2- sec. 5 = 7680 lb.
Ten load in post = 18700 - 7680 = 11020 lb. compression
Horizontal component of control cable load = 15300 tan 35 = 10700 lb.
So load in arm = 10700 - 5300 = 5400 lb. compression.
Lateral component of keel suspension cable in fore and aft direction
= 15300 tan 14 = 3800 lb.
Then for equilibrium lateral component at each tip = 1900 lb.
45700
Max. load in any suspension cable = 3 Sec. 21
(rear keel cable) == 16310 lb.
Deceleration of the vehicle by use of the wing in the para-
chute configuration is desirable from the standpoint of loads. This sys-
tem results in nearly uniform loading on the control system, while the
other scheme results in heavy loads in the aft control members.
An estimate of the airload distribution on the wing during the
glide and flare was made by study of the pressure data made available
by NASA. See the Appendix for a further discussion of the pressure
data. Figures 5.5 and 5.6 show the load distribution on the wing and on
the keel and leading edges. The data revealed that the keel supports
42.3% of the wing load and each leading edge 28.9%.
a = 40
ALE = 45 (FLAT)
= 61. 8 (FLIGHT)
15
x .25C
.35
etc.
2
PRESSURE
COE FFICIENT
.:1P
x/e
.75
q 1 __
.95
o ____ __ __ __ __
o .2 .4 .6
y
SEMISP AN STATION b/2
Figure 5.5 Wing Airload Distribution
.8 1.0
5-14
a = 40
ALE = 45 (FLAT)
= 61. 8
0
(FLIGHT)
1.6
1. 4 I------t---LEADING EDGE-+-___ IDEALIZED LOAD
DISTRIBUTION
1. 0 1-------1--1++-----+
.8
.6
__
o L-______ ______ ________________ ______
o .2 .4 .6 .8 1.0
KEEL OR LEADING EDGE STATION., x /e OR x/e'
Figure 5.6 Keel and Leading Edge Membrane Load Distribution
5-15
The idealized load distribution shown on Figure 5.6 was used
in determining the bending moments and cable loads. The cable loads
per g are shown in the following sketch.
CABLE LOADS (LBS/g)
FWD
~ \ J
Keel 654 865 394 442 861 692
Leading Edge 599 283 323 618 517
The maximum bending moments on the members are: keel, 9100
inch-lbs/g; and leading edges, 6250 inch-lbs/g.
/
302
238
The loads acting on the fore and aft control arms are the
resultant of the loads in the cables which attach to them. The resultant
of the loads acting on the forward control bar was found to pass through
the wing keel at 25.8% of its length. For equilibrium glide, the magni-
tude of this resultant is 3585 pounds. The resultant of the aft suspension
cables passes through the 69.4% keel length point. The magnitude of the
aft resultant is 5221 pounds for a one g flight condition. These result-
ant loads have been resolved into the component acting parallel to the
control cable support members as shown in Figure 5.7.
6
5-16
5-17
n==1.0g
FWD
..
4,000 r-------,----
NOTE 42.3% OF LOAD TO CENTER OF T
28.9% TO EACH END OF T
o
-2,000L-______ _____ ________ ______ ______ ______
60 70 80 90 100 110 120
6 (DEGREES)
Figure 5.7 Longitudinal Control Force Requirements
SECTION 5.2
WING DESCRIPTION
TABLE OF CONTENTS
Section Page
5.2.1 Structural Configuration 5-19
5.2.2 Pressurization System 5-20
5.2.3 Packing 5-26
5-18
5-19
SECTION 5.2
WING DESCRIPTION
5.2.1 Structural Configuration - Two paraglider landing systems
are presented for application to the Apollo Command-Module. The
configuration shown in Figure 5.8 uses the 2-stage deployment system.
In this system the wing membrane is fabricated from a four-ounce dacron
base cloth impregnated with a polyester coating to reduce the perme-
ability. The membrane is formed by joining together standard widths of
cloth. The seams in the membrane are oriented parallel to the keel line
to minimize surface distortion under flight loads.
The membrane is supported by an inflatable keel and leading
edges. These inflatable members are made up of two independently
inflated tubes of dacron impregnated with polyester, each of semicircular
shape and held together by a layer of non-impregnated cloth, to form a
circular tube. The membrane is bonded to the sides of these inflatable
members. Dacron gussets suspended over the keel form a "saddle"
(Ref. view C-C Figure 5.8) and give an efficient load carrying arrange-
ment. Included in the gusset construction is an aluminum plate which
acts as load bar in distributing the load to the membrane. At the leading
edges the membrane wraps around the semicircular inflatable tubes to
form the characteristic circular tube. On the leading edges, the gussets
are attached to the outside portion of the tube at the membrane (Ref. view
A-A Figure 5.8). The use of two independently inflated tubes in each
leading edge and keel gives a fail-safe feature. Tests conducted on dual
chamber tubes have illustrated that one chamber will carry approxi-
mately 80 per cent of load originally carried by both chambers.
A fitting provided in the apex of the wing used to attach the
keel cables also holds the gas generator container. At 45 per cent of the
keel length, provision is made to transfer the initial snatch loads from
the drogue chute to the command module through fittings and steel cables
as shown in E -E Figure 5.8. At the trailing edge of the keel and
leading edges there is a fitting for attaching the suspension cables.
The configuration for the single stage system is shown in
Figure 5.9. The wing is identical to that shown in Figure 5.8 except for
the construction of the keel, the method of attachment to the drogue
chute, and the addition of radial reinforcing bands in the membrane. The
keel is constructed of two inflatable semicircular tubes contained by an
outer casing which attaches to the membrane at the top. A doubler is
attached to the membrane above the junction of keel and membrane (Ref.
view C -C Figure 5. 9). The drogue chute is sewn to the vertical member
of the keel and passes through a hole in the membrane. Dacron radial
reinforcing bands 1. 50 inch wide, are bonded to the membrane. At the
center point these bands are bonded to a doubler and the doubler bonded
to the membrane. The above changes were found necessary because of
the different loading experienced when the wing is used as a parachute
on initial deployment.
Each wing construction is tailored to give the most efficient
use in the system in which it is employed. The particular sections used
for keel and leading edges were selected after careful comparison
primarily of the weight and structural aspects.
5 .. 2.2 Pressurization System - One concept of a pressurization
system for the inflatable wing consists of a single, dual chamber, nitro-
gen supply tank located in the wing (ref. Figure 5.10). The supply tank
can be fabricated from fiberglass or steel. From the weight standpoint,
fiberglass is the most attractive. However, allowable package volume
restrictions dictate that steel be the tank material. The volume of each
chamber in the supply tank is 890 in. 3. This tank is mounted in a fiber-
glass retainer, which in turn is bonded to the fabric of the apex. The
chambers are pressurized to 6000 psi. Each chamber of the tank
pressurizes one compartment in each tube, resulting in two independent
systems. Each tank pressurizes 205,000 in.
3
of inflatable tubes to 26
psi absolute. A pressure reducer is employed between the supply tank
and the tubes to regulate the inflation pressure and minimize the inflation
loads and time. One-way valves are utilized at the tube inlets to prevent
pressure feedback in order to avoid loss of one system in the event of a
puncture to one of the tube compartments. By exhausting both chambers
of the supply tank, the keel and leading edges are inflated to the desired
pressure of 26 psi absolute established by the abort mission require-
ments. This pressure level is obtained by bleeding excess nitrogen
through relief valves situated in each compartment. The relief valves
are also used to extract air from the inflatable members prior to pack-
aging.
The wing is reefed and folded during its initial deployment
and pressurization of the tubes is accomplished while the wing is in this
position. Positive inflation of the tubes through the folded area by
means of a simple spring-loaded expansion ring provides a sufficient
opening for gas flow. A flexible non-collapsible hose in the folded area
provides increased reliability.
5-20
/7.0.we1l INSlJ t;;4tfUER .I.'EEI.
IHFRail/ATE.' /JACM/t
NEJI,'RANE
72) INOEfENNI,rt'f 11JNs
SJlRt}{JO
MEMBRANE
!SAlit!EHEHiJe,,;
----,.--"
-- I I --- I I -------- i
I /1
1
c
1:::\',. '" t't
M'"JlM'AN" E>:TiM:I",o ANt'
liY s;.JJ:!.!X.E ,Jff./lliER
TGFORAf G:l$S(T
UAPII(; EXE CONSTR(,CTIO#
sou 1/4
-+--'1
___ ___ I,
:=
Il
,
-/
-.--";
/'
/
/
/'
j
'.r-------"i
'/ ., \'
.--7==-===-...0-'--;" -c ___ "'"---=i'
I'
I'
------\:'
I
I'
-------- - ---- - - - - - --- ----
J
/::;::' I' ,
,
'/ "/
"
_____ _
,:- __ _ ---- -- :::J __ '
--'
C: II
"
",
...... "
g-
Il
I I __
WIT!! POL'fESltR
.......< .... ,
.5 """' "",""
FT
C-----'-- -(
SCALE 140
' ..........?2.
"
i!4LVE - AlSO iJSEtJ 10
EYKVATE AIR FOR
TYPICAL (";).4:4("1':;-
caeD IVsmcw (,r" I
4FTE "un GAS
iJdCT/Mi
AlCTlNti spur n:J
AL.L.CP R.UA.611.1TY
(!F
L 'I .,
?-r-J l=:-fl """1
POSITIOH OF OG--/N6"
Fl.OIV """"AS.
N
.%tW,lW TYPKAL it/erIN,;' ANt! Pi! /(';(C"I:' K4L VE
JlAfIIRX.O (z) _i
R')R ATTAOIAfENT a>(lAS
(lEi/ERATO/! CaTAf#ER TO
!'ITTIN" SEE YlllY 'G"
f:CJ<JYARO ATTAOINENT /!)INT /OR
SlfRCtlJ UNES
. SCAU 1/4
AcrESS OOOR
/--,
/
+
/
,
/
>'--.!/
, I
. I
I
\I ,
ME,!fBRANE
0
XAL( 1/4
Tl
I
n--n
I
1
!
-
I
.c" c-.r-.!.-.
Fl- "
\'
r
i
D
I
/
/
,
IIJJl1J
-I
I
ffT ATTACII#ENT ;aNT R:;e _J
t/NES. T.VIS FITT/>\'6
TYA'&It m". LEACVM.;
/
,
"
/
==1=-- ,t:
11..
.\
*-1 ,
-- i'
i
"
-=l C:::J i (
. ,-----
. +,
;JEW
SIIQI'PK' ATTACH<,,yT a.: .. ..:,;
"-"I>WATU" COYTA/,yER TO
FCRIr.ARJ r Flrrp"l.
TAUT ""tY a'RI-W
llf"PLOWIMT
ll------- 0.8[ TO
"
""" G/S-SOS
'" Ub
Figure 5.8 Apollo Recovery System - Wing
5-21
--;7(V
GIISSE7 ATTACIlAfENT POINTS. ---=- /' /U
"/
./
/"
/""
"/
'._--
,-
FLAT FtIW r:Fr;VSSET SJlOIWII'
ATTACk'NfNT 01' RA/)IA!
VlEII SJlOWI/VG FlAT !'LAN /'ATrERN OF
(SEE I,OTE i)
1&0 .scALE
EF_EeTl;-E -"'RACH'(/TE 4r.O
PAC ROil RADIAL REINFCIRC/N6 !!ANJ)S
13ON!)/J TO JlEM!JRANE
M
.1
TO JJROQ/E CNUTE
---------r 1.50 TYP FOR RAJ)IAt. IWI,,",
t'l;;,.
if ... SCALE
/X)U8LER
HEHM'AlYE
6(f.J"SCT.
""z::i:!o::;"'" - lW8l.ER
WEN SIIc,wI4't: TYfYCAL .tEEL CONST,f'UCTICW
(r,:eL IIIFLATE!),)
LEADING EXE LINES
rEEL LIliES
1\
l \ a-
) \
f \
I \
: \
1 \
\ \
\
\
I
\
\
\
\
\
\
n\
L\ ",
Ii./ '\
-- ---------
P/RKT/CIN FLlr;/lT
SCALE
f
I
I
I
I
I
I
f
I
fEIIIRhiCII .. N.IIOS
L.<X>5LY REEFEO
EXfi.OSIVE I!OLT
c
rEEL SJ/OIV# M'FL.ATED
SCALE
IIJlilr::.-l-
el!EA' - /WAY FITTIIIGS Ii) R(a;
NYLCW CABLE TO )R()G(/E O/gT:
SFWEIJ 7tJ KEEL.
.J"JlR!II/D !.JNES
'SPACERS (rJ
511011/1/16 HET/lOIJ o.c RETAIl/lUG" ,,,JIlES FaR I'ARAO((fTE MF/til7RA1"IM.
HAL' SCALE
,
,
I
I
\
\
,
I' /
/
\
\
I
f
/ \ I \
WEN LOOrlllG
Figure 5.9 Apollo Recovery System - Wing - Parachute Deployment
l
/
5-22
\ /
, /1
,.... /
----
WING APEX
MEMBRANE
r;...---------------- hP----
V k7
J?
I /,'
I / .. ---n--------rr --.... , I{
--ff---f-- - II - I I 'c I -
\
LJ LJ
//
-
____________ . ..,.. ____ _
FORWARD ATTACHMENT POINT FOR
SHROUD LINES
FIBERGLAS RETAINER WITH
BOTTOM & WALL LINED WITH
STA-FOAM
Figure 5. 10 Apollo Recovery System - Pressurization System
5-23
5-24
The inflation is initiated by a mechanical valve located on the
pressure bottles and actuated mechanically by the separation of the wing
from the Command Module. A separate solenoid valve is provided to
allow pilot initiation of the tube inflation in the event of malfunction of
the mechanical system.
A second pressurization system is shown in Figure 5.8. The
inflation gas is produced by igniting a solid propellant in two gas genera-
tors. By burning a calculated amount of propellant, each generator will
produce one-half of the volume required for the system. The gas is
cooled to a desired temperature before leaving the generators. A number
of gases were found to be compatible with the para-wing system, and the
final choice of gas used would b,e.,,4etermined from the weight aspect.
Ignition of gases is The gas generator is a
self-contained, hermetically sealed unit and is extremely safe in hand-
ling.
From the generators the gas passes through manifolds,
fabric ducting, and fabric check valves arranged so that each generator
fills one side of each inflatable member, giving two independently inflated
systems. Energy from the flow of gas overcomes the wire spring force
te,nding to keep the valv(;;ls closed, and the gas passes into the six com-
partments(ref. view H , Figure 548). Each compartment is pressur-
iized to 26 psia and has a relief valve set to this pressure. The relief
valve is also used to extract air from the inflatable members prior to
packaging. The apex of the wing is pressurized to 25 psia through two
orifices (one from each generator) located on the main fill ducts. This
compartment will be pressurized in the same time interval as the other
inflatable members. Using gas generators, the total time for the
system is about seven seconds. Should pressurization be lost in anyone
compartment of an inflatable member, the other is completely independ-
ent and will carry a high percentage (80%) of the total load.
The gas generator system eliminates the hazards of carrying
a high pressure storage bottle, is easier to package, and is lighter be-
cause of the elimination of the pressure reducers and high pressure
flexible hoses needed for inflating the members. The above advantages
indicate that the gas generators are more suitable for the pressurization
system on the para-wing.
5.2.3 Packing - The packing procedures set forth are based on
experience gained with full scale wing systems and must be carefully
observed to insure proper deployment of the system. First, the wing is
reefed with the wing membrane folded between the inflatable members.
ZI
ffim
~ I
These inflatable members are deflated with a vacuum pump for minimum
packaging volume. To protect against natural inflation due to the de-
crease of atmospheric pressure with altitude, bleeder valves are pro-
vided. The suspension cables are extended parallel to their respective
inflatable members and secured in place. These lines are secured at
intervals by 70 lb test chords and held in a flat pattern with tape to pre-
vent entanglement. Next, the entire wing is folded at the center about a
lateral axis and reefed in this position. The snubber lines are attached
to the keel tube and control arms. The pressurization valve in the apex
of the wing is then attached to the manual trip line and electrical connec-
tion for initiation of the pressurization cycle. The reefed wing is then
circumferentially packed around 1/2 the command module passage tube.
The wing is wrapped for one-half of the storage area circum-
ferential length, then the direction of wrap is reversed. This is done to
eliminate the inherent twist obtained when deploying from a spiral wrap.
The parachute is next folded and packed in position. The
entire recovery package is held in position by straps until the storage
compartment cover is secured. These straps are then removed through
an access door in the cover.
The parachute deployment configuration of the wing is
packaged in a deployment bag similar to an actual parachute system.
The flexibility of the wing allows this packaging capability. This deploy-
ment bag, in turn, is stowed in the recovery system compartment of the
command module.
The entire packaging area is restricted to a volume of
26 ft
3
. The paraglider system requires approximately 17 ft3 of volume
for storage. The results of a parametric volume analysis are shown in
Figures 5.11, 5.12, and 5.13. These curves are representative of the
actual volume and not of a packaging volume. Previous experience with
te st wings has indicated that a packaging factor of 3 applied to the struc-
tural volume would give a number representative of the actual package
volume. The factor is needed to compensate for the inability to package
the wing void of air pockets. Portions of the structure are not com-
pletely flexible to facilitate efficient packaging.
5-25
..-..
M
E-4
~
-
~
~
~
,....:J
0
:>
5-26
7.0
6.0
5.0
4.0
3.0
2.0
llZ = VERTICAL LOAD FACTOR
W = GROSS WEIGHT
8 CABLES
llZ W = 70,000
llZ W 50.000
1.0 ~ - - ~ - - ~ - - - - - - - - - - - - - - - - + - - - - - - - - - - - - - - - - - - - - - - - ~
1,000 2,000
WING AREA ( F T ~ )
Figure 5'.11 Wing Structural Volume
3,000
- C'I).
E-t
Pt4
-
~
~
....:l
0
:>
n
z
= VERTICAL LOAD FACTOR (FT. 2)
W = GROSS WEIGHT
7.0 ~ - - - - - - - - - - - - - - - - - - - - - - - - ~ - - - - - - - - - - - - - - - - - - - - - - - - - - ~
4 CABLES
nZW = 70,000
6.0 ~ - - - - - - - - - - - - - - - - - - - - - - - - ~ ~ - - - - - - - - - - - - - - ~ - - - - - - - - ~
5.0 ~ - - - - - - - - - - - - - - - - - - - - - - - - ~ ~ ~ - - - - - - - - - - - - - = - - - - - - ~
nZW = 50,000
4.0
3.0
2.0 ~ - - - - - - - - - - - - - - - - - - - - - - - - - - ~ - - - - - - - - - - - - - - - - - - ~ ~ ~ ~
1.0 r - ~ ~ - - = - - - - - - - - - - - - - - - - - T - - - - - - - - - - - - - - - - - - - - - - - ~
1,000 2,000 3,000
WING AREA
Figure 5.12 Wing Structural Volume
5-27
5-28
n
z
= VERTICAL LOAD FACTOR
W = GROSS WEIGHT
6 CABLES
7.0
n W = 7,000
Z
5.0
1,000 2,000
3,000
WING AREA
Figure 5.13 Wing Structural Volume
SECTION 5.3
SUSPENSION SYSTEM
The wing-command module system is formed through the
use of a number of interconnecting cables. These cables form a suspen-
sion system by joining the wing structural members (keel and leading
edges) to the control system which is mounted fore and aft on the com-
mand module.
The suspension system is designed to perform two separate
functions during the recovery operation. During the initial stages of
paraglider recovery, the wing is deployed in a parachute configuration.
The wing inflatable members are not inflated for this phase. After de-
celeration of the vehicle, the wing structural members are inflated and
the wing is deployed to the gliding configuration.
Although a total of 19 cables is used in the entire suspen-
sion system, only 10 are used while the wing is in the parachute configu-
ration as shown in Figure 5. 9. A 11 other lines are slack. The 10 cables
are those which are attached to the wing apex, the aft ends of the wing in-
flatable members, and those which attach to the three forward points on
the leading edges. Three cables from each leading edge are joined to-
gether, and each of these bundles acts as a single cable. Thus the para-
chute can be considered supported by six riser lines.
To allow the wing to form into the shape of a parachute, the
six riser lines are deployed with various lengths, the length of each line
depending upon its wing attachment point. The length of the line in each
case is shorter than that required for the glide configuration. The two
keel cables are deployed to the proper length by the drag reels. Loops
are formed in the remaining parachute lines to bring them to proper
length for the parachute configuration. The loops and drag reel are re-
leased for deployment of the wing into glide configuration.
Three of the parachute riser lines are attached to the for-
ward control arms, and three to the aft control arms. The cables to
each control arm are divided between the center and outer ends of the T
member of the control system. During the parachute phase, the T
shaped control arms are aligned parallel to the resultant load which is
applied to the arms by the riser lines.
5-29
5-30
During the gliding portion of the flight, the suspension and
control systems are capable of providing positive control of the vehicle.
This control is achieved by displacement of the command module c. g.
with respect to the wing.
Nineteen cables are used in forming the wing suspension
system (Figure 3.1). The keel system is formed by attachment of seven
cables to six pOints on the keel, these six points being distributed along
the member in such a manner that the bending moment is minimized.
Two cables are joined near the midpoint of the keel. The three forward
cables converge to the center of the T of the forward control bar. The
aft four cables similarly attach to the aft control bar.
The leading edge cable arrangement is very similar to that
of the keel. Six cables are attached to five locations along the leading
edge. The five attachment points are distributed similar to the keel ex-
cept that there are no cables at the extreme forward ends of the mem-
bers. As with the keel, two cables are joined near the midpoint of each
of the leading edges. The forward two cables of each leading edge con-
verge to the outer ends of the forward T shaped control bar. The four aft
cables are Similarly attached to the rear control bar.
The design of the suspension system cables results essen-
tially in a rigid wing-cable system in the pitching plane for all normal
flight attitudes. It can thus be considered that the fore and aft confluence
points of the cables remain in fixed locations in the longitudinal direction.
For simpliCity of attachment, single cables are used between the con-
fluence points of the aft leading edge cables and the aft control arm. A
constant wing angle of incidence of 30 degrees is maintained by the
system.
The longitudinal motion of the Command Module between the
two confluence points is used for pitch control of the vehicle. Two con-
trol arms mounted fore and aft on the Command Module provide the
motion. The two arms are mounted near the base of the Command
Module and are free to rotate about this point in the pitching plane. Con-
trol movements by the pilot will rotate the arms back and forth until the
c. g. position for the desired flight attitude is obtained.
For lateral control of the vehicle, a shifting of the c. g. is
also used. Mounted laterally across the top of the pitch control arms
are members which form aT. In the lateral direction, the suspension
cables from the keel are attached to the center of the cross bars, and the
cables from the wing leading edges are fastened to the outer ends of the T.
The up-and-down rotation of the arms of the T is used for roll control.
SECTION 5.4
CONTROL SYSTEM
TABLE OF CONTENTS
Section Page
5.4.1 Control System Design 5-34
5.4.2 Structural Description 5-34
5.4.3 Hydraulic System 5-37
5.4.4 Servo Valve Control
5-38
5.4.5 Sequencing 5-40
5.4.6 Duty Cycle
5-41
5-31
SECTION 5.4
CONTROL SYSTEM
5.4. 1 Control System Design - The control system is designed to
provide attitude control of the wing from the time of wing deployment to
the time of landing through a wing angle of attack range of 27.5 to 45
Wing attitude control is achieved by positioning the capsule c.g. relative
to the wing c. p. by virtue of the shroud line control arms. The front
and rear frames carry the roll control arms, and, together with the pitch
cable support column and pitch cable buggy, form the pitch carriage.
See Figure 5.14. The continuous pitch cable insures synchronization of,
and maintains parallelism between, the front and rear frames. The
pitch cable carriages ride the pitch cable support columns, rotating the
front and rear frames, thus positioning the wing shroud lines so that the
desired relation between capsule c.g. and wing c.p. is obtained. The
continuous roll control cable maintains synchronization between left and
right control arms, which rotate in the plane of the frame about the hinge
on the carriage axle for roll control.
5.4.2 Structural Description - The forward and rear frame assem-
blies shown in Figures 5. 14 and 5. 15, are of similar fabrication, each
assembly comprising two main posts, two horizontal arms and two hy-
draulic cylinders, together with the cabling and pulleys required for
transmission of control commands.
The main posts are sloped towards each other at the upper
end and are inclined approximately 5 from the vertical. The posts
(steel tubing of circular cross-section) are joined at the upper end by a
tubular shaft. At the lower end, each post is hinged to the capsule
structure. A stiff corner fitting at each end of the shaft ensures a highly
efficient joint between the main posts and the upper shaft.
The corner joint fittings are designed also to accommodate
the hinge pin about which each horizontal arm rotates for roll control,
and further to support the upper cable pulleys.
The lower end of each post is attached to a hinge fitting
which also provides for the attachment of the lower cable pulley.
The two posts are further joined by an upper and lower yoke,
flexuously stiff to restrain twist in the posts. The yokes are located
such that their attachments to the posts will divide each post into approx-
imately three equal lengths.
5-32
PITCtI CA8t..t- 6UPP:JI?T cow MAl
P/!VI CA8I..-
fR.OIiT Lr: RCI.l. ()J.irl2oL AI2M
IJ. {of)(k 6/.1/2aJD Uut-
fWD
,
8uac,v AXLI:-
PlTCI-/ CA.&'.f .w:;W
FROJ./T i2oLt. PRIM, crt,
fOl<.tJJAt2D
({)JJT/)./U0U6 PITctl COAiT. CABLE-
CAPoULf:' IA/Ai-R f orJrE-/2 S/.I1:t..L
LT. l.ADIIJt; txt- 611IXxJD LIAlf
(.lEA12 /2OLL PRIM, C{l..
FOR.tJJA/}J) J2T. /2Cti. COJJr; ARM
RT. Lt;4DINe; ELX,E- 6t1!2OU1J UAit-
/2oLL COJJr. C4ei- ;:!2o)}T
F!2oiJT /2oIJ.. AUX, CYL.
PITctI CAI3Lt- MOT0f2 I PI TCI./ CAI!JI.G-
D12!V- DI2UM
PITCtl CABLE- 6!1PPCi!T COUJMU
/2{,4/2 /2T. l2etL a:l!tTPd ARM
I2T. t.E:4DI,vCi f-D:;E- 6J.IROW 1../jJC-
PITCf.I CAf3/.f A:Jit.EV
aoLL co&. CABLe- /2?412
I2fAR RoiL Ai!,Y, CYL,
PITC!J CAB<.E-I3Ut;qV (12&112)
BUc;tiV AtU-
OF CUTOUT IN CJJP.5U/.- OUT&< 6t1H.L
REA FRAMe
COAJrROL MECf.lAtJI6M-
(IC6Et.. 6/.112OUD utJE- I2f:'Af2 8/JIDLE- /JOT 6J.1OlifJJ /{)12 Cl.Al2lrY)
NO 6CLJLE--
Figure 14 Isometric of Control System
5-33
r
:
,
,
-
,
1
"
,
,
,
'
-
-
-
-
1
1
-
,
'
r
:
:
:
\
j
5
!
:
i
l
8
.
"
,
,
'
\
r
\
1
,
0
<
0
,
.
;
;
;
,
'
,
,
,
-
-
-
<
?
-
-
-
+
-
-
-
+
+
-
+
,
!
:
.
.
\
(
9
,
-
I
I
I
I
I
I
'
I
I
,
t
e
,
\
,
,
r
,
<
I
I
,
'
-
-
'
-
,
-
;
:
.
.
-
l
:
-
-
'
i
I
t
t
;
!
'
(
q
I
'
I
,
"
'
,
,
I
L
.:
'
:
I
:
,
,
-
-
"
,
- I
1
,
'
.
E
-
-
-
-
,
,
,
,
"
!
:
l
5
/
-
-
<
"
-
-
-
-
-
-
-
-
-
-
-
-
-
-
=
'
-
-
-
-
-
,
"
,
1
1
"
"
"
;
'
,
,
"
,
0
,
,
,
>
I
!
!
!
,
"
<
I
,
u
>
,
,
.
.
,
e
l
!
!
I
:
i
o
-
,
"
.
.
-
:
.
;
:
:
r
:
,
.
,
\
,
'
:
:
'
=
-
,
T
'"
e
,
,
U
-
l
>
,
3
3
"
.
'
"
,
I
,
'
-
-
,
,
,
,
-
,
,
,
,
-
J
u
,
5
2
,
I
I
I
'
I
I
I
I
I
I
I
'
I
,
I
,
I
,
I
I
I
I
I
I
'
I
]
I
,
h
'
'
'
'
7
;
:
;
h
i
:
:
l
I
1
I
I
I
I
I
I
-
-
,
'
,
I
I
I
I
I
I
I
I
I
I
f
,
I
,
I
_
_
I
:
.
.
'
7
'
"
.
"
.
.
The horizontal arms are of steel top-hat cross-section,
shaped in this manner to facilitate stowing. The area within the cross-
section has been specifically arranged to avoid secondary bending along
the longitudinal axis due to eccentric load reactions. The bolt at the arm
hinge is of high strength and stiffness to ensure easy transmission of
lateral loads applied through the suspension cables at the arm tip.
The high strength cables, as part of the frame structure, are
flexible and corrosion resistant. The hydraulic cylinders will incorpo-
rate a pressure of 3000 lb/in.
The complete frame rotating about the bottom hinge is guided
at the upper end by a carriage attached to the upper shaft. The carriage
travels on rollers along the cable support member in fore-and-aft direc-
tion with the cable support member rotating in a vertical plane about its
hinge point on the capsule.
In the stowed pOSition the horizontal arms, rotated about
their hinge lines, lie approximately parallel to the main posts, and with
the cable support member rotated fully downwards to fit between the
posts. The complete arrangement is installed just inside of the capsule
skins.
5.4.3. Hydraulic System - Because of the high magnitude of control
loads encountered in flight (see Figure 5.7), a manual mode hydraulic
boost system with servo valve control is employed. Actuating hydraulic
cylinders are used for roll control, and a hydraulic motor for pitch
control. Power is obtained from a variable delivery electric motor
driven pump and/or a pre-charged high energy hydraulic accumulator.
See Figure 5.16. This arrangement will provide moderate primary
power for flight control during glide, and high auxiliary power for flight
control during the flare maneuver. The primary system uses motor-
pump power to actuate the front and rear roll primary cylinders and the
pitch control motor. The auxiliary system uses stored gas power to
actuate the front and rear roll auxiliary cylinders and the pitch control
motor. Both primary and secondary roll cylinders and pitch motor
are able to handle the maximum flight loads at 1 1/2 g load factor. The
system is designed to give satisfactory roll rate during glide and max-
imum pitch rate during flare.
The 3 HP motor pump primary power supply provides a roll
rate of 3. 9 /sec. and a pitch carriage rate of 2.25 in/sec.
During flare, the auxiliary system is required to handle the
high loads and rapid pitch rates, and will provide a minimum pitch
5-35
5-36
carriage rate of 18 in/sec. Generous roll rates are available (10
0
/sec.)
but are limited in duration because of the oil storage bottle capacity. A
constant displacement pitch motor, rated at 15 HP and geared 30 to 1, is
used to provide the maximum pitch cable drive drum torque of 13,300 in.
-lb. which occurs at a = 45
0
The front roll cylinders can each handle
2250 lb. rolling load with a total stroke of 10 inches while the rear roll
cylinders can each handle 9000 lb. rolling load (note block and tackle
rigging on rear roll control arms) with a total stroke of 10 inches. The
maximum roll angle of the arms is 15
0
from the normal. The roll cyl-
inders can operate separately or in series. During separate operation
of one cylinder, the second cylinder is by-passed by a run-around line
and consequently floats. In this manner, the wing is capable of adequate
roll control on either primary or auxiliary power or both. Because the
fail control glide angle 'Y = -31
0
results in a sea level sink rate of 35 ft/sec.
which is so near the minimum of 32 ft/sec., no back up pitch control is
necessary. Nonetheless, the pitch control motor can be operated from
either primary or auxiliary power supplies but not from both.
The primary system is recirculating, the auxiliary is not. A
self-pressurizing reservoir of 100 cu. in. is used for the primary system,
and an unpressurized drain tank is used to recover auxiliary system
fl uid. An integral relief valve will relieve the drain tank of entrapped
gas as it receives drain fluid from the auxiliary power system. Shuttle
valves in the supply and return lines to and from the pitch motor, pres-
sure controlled by the auxiliary system and normally open to the primary
system, route auxiliary fluid through the motor and inhibit primary fluid
flow through the motor whenever the auxiliary pressure is applied.
The relatively short length of fluid lines is advantageous in
maintaining small diameter tubes. Furthermore, because of this short
line length, only one filter is used to decontaminate the fluid entering the
servo valves.
All components containing entrapped fluid or gas will incor-
porate overpressure relief valves to accommodate thermal effects while
the system is dormant. Similarly the auxiliary lines are protected by a
relief valve, and an accumulator in the primary lines will handle pressure
variations.
5.4.4 Servo Valve Control - The roll actuators and pitch motor
will be controlled by servo boost valves mounted on the housing of the
controlled element. The valve is connected to the pilot control stick by
cables and will respond to movement proportional to control stick move-
ment. Internal mechanical feedback is used within the actuator so that
ItJD.
?
Fill \ at-E-O
VALVE:
!=Ill
OQAIU
Qt-lIE:-F AUX. !=OIUt-1l 'SUPPLY
I2.RIE-f
(CD LOll) Lwa
T llJARklIlJC!{ l\
j TE-oT c.m.hJ.
<../ AlN...
>" I
O/J
IIJDlCATOIl
I
LltJE- CODe-
--- QHUQu
---- -S&I2Va col..lTI2OL
j __________ "
,
21 I I I ?e",,""
q I 1:$ 1 WI. 00" Dl2Alil
I q I q go I TI\IJIL Ihl
>( " 1
,(
0{)
- .. - 8.E-C.TI2ICAL
--- N\E-C.\'\AWICti,L
--- -SUCTlotJ
LbT OF-
FILTE-12
f':J Q...I:C.K VALVE::
@] COIJTI2DL VALVE;-
-Ii
i I QoLl
+
' 1 : PITC).\ _*0\
__ !=UJO :- ___ _ J 12141-1T
0'
(J
x
."\
?.BVaLTD.c. 'SUPPLY
(OUk!.
___ J -- ---' --- lm !
I I
1
__ AUfOMt.TIC-
?> UP MOTOQ- PUMP
FOWEQ
P12IMARY'
OIJ LlGi-IT
I
I
";)l.IunlE-
VAlVF:
I I I
I 1/4 '1-.020 I I
I I I
\-B-J
1
_______ J
-1-__ I I '/4 x.OlO
Pl21M. Qf:-6E-12\10IQ P12.\'-'Y;lU!2.l:-
1
OJ l --to
f Dl2AItJ
:>E:-I2VO cCl/JrQOL VALVf::.
W0\2f..J\4LLY
BY .,V-6T&I/\ DQE-S':>UQf:-
II C.YlIWDf:-12 012 voroQ
lk:=======I, "'- WOQMALlY ODH.J IlUtJ AQO.)tJD oSUUT Ot:F.
Ml::C\t - ---.J By' 012 MI:-Q..\At-\ICAL
PILoT CDlJT\2oL lllJILAG,e
\=QQ CYUtJDE-Q OQ MOfoQ
BY'PA-n
Figure 5.16 Hydraulic Schematic - Apollo Recovery System
5-37
the actuator follows the pilot's input and to limit the motion. A coupling
between manual control and the automatic landing system provides identi-
cal automatic command of the servo valves during the landing maneuver.
5. 4. 5 Sequencing - Upon deployment of the wing in the parachute
configuration, the front and rear frames are unlatched by a cable fastened
to the deployment drag chute, and are spring loaded to open into the air
stream. All actuators are in a by-pass condition and will float, conse-
quently damping out rapid movements of the control frames and control
arms. Upon deployment of the wing from parachute to gliding configura-
tion, the signal that commands de reefing of the shroud lines will simul-
taneously energize the pump start switch and put the primary system on.
The primary pressure-on light will indicate satisfactory system pressure.
The primary roll cylinders and pitch motor will now be activated, and
will respond to pilot control. The auxiliary roll cylinders will continue
to float. If at any time during flight the primary pressure falls below
1500 psi, the pressure-on light will go out, and the low pressure sensing
switch will command the auxiliary power system solenoid shut-off val ve
to open, and command the motor cut-off switch to turn off. The primary
roll cylinders will assume a by-pass configuration and will float. The
auxiliary roll cylinders and pitch motor will then begin operation from
the auxiliary hydraulic supply.
The auxiliary power accumulator contains enough oil to
accomplish one flare attempt from O! = 31 to O! = 45 and a second at-
tempt from O! = 33 to O! = 45. At 300 psi system pressure 230 in.
3
are
required. In addition, limited roll control power for gliding flight is
available in the event the primary system fails or is inadequate for
recovery from a severe roll maneuver. In the latter case, the pilot can
manually apply auxiliary power by opening solenoid manual shut-off valve.
Twenty-five cubic inches of oil are required per full roll maneuver, and
a capability of 6 rolls is presumed minimum. This requires 150 cubic
inches of oil. One-hundred twenty cubic inches are available for minor
changes of pitch attitude. In any event, a low level warning light will in-
dicate 230 cu. in. remaining in the storage bottle, the safe level to insure
capability for flare.
The auxiliary power supply must also be employed during
normal operation in order to execute a successful flare maneuver. The
solenoid-manual shut-off valve must be manually opened in this case.
Automatic operation of the auxiliary pressure shut-off valve can be pro-
vided as a function of radar altitude if it is believed desirable to preclude
pilot error or oversight. Gas pressure and auxiliary pressure indicators
are provided for monitoring at any time the state of charge of the gas
5-38
5-39
storage bottle and the oil storage bottle. An auxiliary pressure-on -light
indication will confirm satisfactory operation of the solenoid -manual
shut-off valve.
In the event that neigher primary nor auxiliary pressure is
available, the wing-capsule system will find equilibrium at approximately
O! = 31 for minimum rate of sink. To hold this angle steady, the by-pass
action of the roll cylinders and pitch motor can be prevented by the pilot
through a by-pass control cable which, when operated, will close the run-
around valve and lock the cylinders and motor.
To prevent the wing from falling on top of the capsule after
ground contact is made, the left rear shroud line attach connection will be
severed at the control arm by an explosive fitting which will be fired
upon impact. A switch deployed with the capsule heat shield insures the
security of the explosive fitting during flight, coming into operating
position only with deployment of the heat shield. Subsequent closure of
the heat shield at impact arms and discharges the explosive fitting,
allowing the wing to roll to the right and away from the capsule.
5.4. 6 Actuator Duty Cycle and Power Requirements - Taking
the peak power capabilit ies of the roll and pitch actuators as 10 and 15
horsepower respectively, or 25 horsepower combined, and aSSigning to
them a conventional duty cycle of 25%, an average horsepower of 6. 25
would be required throughout flight. The 15 horsepower pitch actuator,
however, is necessary only to provide high rotation speeds during the
flare maneuver. The vehicle is baSically a highly stable glider, and
neither rapid nor frequent maneuvers are required. If a 5 bank angle
correction (5 in and 5 out) once every 30 seconds is assumed, the roll
duty cycle drops to approximately 4% instead of 25%. This would require
only O. 4 horsepower average for the roll actuation function. In pitch, a
maximum attitude correction of 5 (one direction only) once every 5 min-
utes is a reasonable assumption. At maximum capability (which would not
be used operationally but is postulated here for the purpose of estimating
a duty cycle), the pitch correction could be accomplished in approximately
one-half second. This produces a pitch duty cycle of 0.2% and would re-
quire approximately 0.03 horsepower. The average power required dur-
ing the landing operation (exclusive of flare) is thus 0.43 horsepower.
The provision of a 3 horsepower pump appears to afford liberal allowance
for considerable emergency maneuvering. Assuming 75% efficiency, the
nominal electrical load would be 430 watts. If the maximum installed
capability were utilized, the electrical load would be apprOXimately 3000
watts.
SECTION 5.5
COCKPIT DISPLAY INSTRUMENTATION
The cockpit instrumentation requirements have been based on
landing flare simulation and consideration of instrumentation necessary
to accomplish a let-down to a specified landing area. These instruments
are:
(1) Turn and bank indicator
(2) Pressure altimeter
(3) Compass
(4) Artificial horizon
(5 ) Radar altimeter
(6) Vertical speed indicator
(7) Indicated airspeed
(8) Landing Display (Rate of Descent error indicator)
(9) Vertical speed indicator (Radar)
All of the above items except (5), (8). and (9) are conven-
tional aircraft cockpit instruments readily available from a variety of
sources with accuracy and performance sufficient for the Apollo Flex
Wing landing operation.
The radar altimeter gives accurate and reliable altitude and
rate of descent information from greater than 250,000 feet to the ground.
Accuracies of 2-3% are readily achievable. Considerably greater accu-
racy is currently being disigned into the Ryan Surveyor and Saturn Radar
Altimeter. It operates in two modes; the first from the maximum alti-
tude to 1000 feet, and the second from 1000 feet to the ground. Outputs are
furnished in analog form for remote indicators and for automatic control.
5-40
5-41
The electronic equipment for the high altitude mode is
mounted at the antenna which is a space duplexed paraboloid. Its weight,
including antenna, is about 20 pounds. The volume is approximately
2000 cubic inches. The low altitude mode equipment, weighing approxi-
mately 12 pounds including cabling, is mounted at a remote location. The
volume is 570 cubic inches. The power consumption in either mode is 80
watts.
The latest signal processing techniques are employed to give
the greatest possible efficiency and operational reliability. Mode switch-
ing is achieved automatically, but a manual override may be provided.
Special attention is given to assure that the outputs are of sufficient
quality to give stable and reliable operation of the automatic control sys-
tem. Care will be exercised in the design phase to provide smooth data
requiring a minimum of filtering. This will simplify the stability prob-
lem in the final flare and landing maneuver and provide a tight and accu-
rate control loop to minimize the vertical velocity dispersion at touch-
down. Time constants of approximately 0.1 second are usual. It is
expected that the Radar Altimeter and Rate of Descent Meter for Apollo
automatic landing will have a time constant of .01 second. No problem is
anticipated in tieing two radar altimeters with a time constant on this
order of magnitude into either the Automatic or the Manual mode of land-
ing the Apollo Flex Wing vehicle. Figure 5.17 shows the Surveyor and
Saturn Radar Altimeter and Doppler velocity sensor currently under de-
velopment by Ryan.
Saturn Radar Altimeter
Figure 5. 17 Surveyor and Saturn Radar Equipment
5-42
5-43
SECTION 5.6
ELECTRICAL AND ELECTRONIC SYSTEM
Figure 5. 18 illustrates the electrical power and electronic
signal interconnections. Standard provisions are incorporated for switch-
ing from primary to secondary or emergency power in order to maximize
the reliability of the power supply function. Provision is also incorpo-
rated for powering the Flex Wing electrical systems independently of
other systems for ground and pre-launch checkout.
The Automatic Landing System will be turned on by the se-
quence timer at such a time as to minimize power drain, but will allow
adequate warm-up stabilization and checkout time. It is expected that
due to the utilization of solid state circuitry and the fact that no gyros are
required, the warm-up and stabilization time will be a minimum. It is
anticipated that it will be desirable to perform confidence checks on the
performance of the Automatic Landing System in order to prevent hard
over or locked controls and to allow the pilot time to take corrective or
emergency action before such action becomes mandatory.
The Radar Altimeter and Rate of Descent Meter provide sig-
nals to three subsystems; namely, (1) the deployment sequencer, (2) the
pilot's console, and (3) the on-board self-contained automatic landing
system.
The vertical situation display consists of three instruments:
(1) the altitude, h, indicator. This will be displayed in five ranges;
namely, 1, 000, 000, 100, 000, 10, 000, 1, 000, and 100 feet full scale, (2)
the vertical velocity or rate of descent, il, indicator which will probably
have two ranges: 300 feet/sec. and 30 feet/sec., (3) the rate of descent
error indicator, e"h' This will probably have a full scale indication on
the order of 10 feet/sec. rate of descent error. This indicator is only
significant and is only energized in the final approach, landing and
flare-out phase.
CJl
I
,j::>.
,j::>.
PRIMARY
+28 VDC C
SECONDARY
+28 VDC C H
COMMAND
MODULE
EXTERNAL
POWER
CHANGE-
C ~
OVER
RYAN
__ Wi. 61BI05
FLEX WING
MASTER POWER
CIRCUIT BREAKER
i-------l
I I
1
~ I n
-0 I :
I
I
I
I
-0 I ~
1
I I
I
LMANUAL ..
WING
.1
~ ffi
eli
I COMMAND
SEPARATION
,..,
Q
l MANUAL
I
AUTOMATIC
I h li I INPUTS
...
..
ON BOARD
I VERTICAL SITUATION I
r---+
LANDING
DISPLAY
SYSTEM
L P I ~ T S CONSOLE...-- J
rl ,j
~ p @5 rn
~
p ..... ~ H
PITCH ROLL
Z ~ ..... <t!
~ rl Z Z SERVO SERVO
p.. 0 Cl
o ~ .....
VALVE
, rn VALVE
DEPLOYMENT """'"
RADAR ALTIMETER
I+- r--+
SEQUENCER
AND
RATE OF DESCENT
h
SYSTEM
h'
~
RELAY
r
I
!
-,
HYD
PUMP
MOTOR
PRIMARY
TO
~
SECONDARY
CHANGEOVER
PRESSURE
SWITCH
SOLENOID
VALVE
Figure 5018 Block Diagram - Apollo Flex Wing Re-Entry Vehicle Electrical System
5-45
SECTION 5.7
STRUCTURAL AND MATERIAL TESTING
Construction of an inflatable, flexible structure, capable of
being packaged in a small space, requires the use of specialized mate-
rials. Where lightweight with high stength is also desired, the range of
usable materials becomes narrowed. To further narrow the range, cer-
tain material property requirements were delineated, as discussed below.
The most efficient materials for use in the inflatable tube
members and the wing membrane would be those speCifically tailored for
the application. For this study, however, only materials available on an
off-the-shelf basis are examined.
The maximum operating temperature which the recovery sys-
tem is expected to encounter is only slightly above sea-level ambient
temperature. The efficiency of fabrics in this temperature environment
is extremely good. This, together with excellent packaging characteris-
tics and good tear resistance, indicates fabrics should be employed as
the basic construction material.
In order to be used for inflatable members, a fabric must be
impermeable to air. The membrane, to be aerodynamically efficient,
must be nearly impermeable to air. Even tightly woven treated fabrics
(such as sailcloth) will not meet these reqUirements. Suitable modifica-
tions to the cloth become necessary to overcome this deficiency.
One of two methods is generally employed to obtain an es-
sentially air-tight material. Either the cloth is impregnated with a coat-
ing material or a film is bonded to the surface of the cloth. Previous ex-
perience with bonded films has demonstrated that as the material is
heavily flexed (e. g., trailing edge flutter conditions) the surface film may
part from the base cloth. An integral coating, although slightly heavier,
thus appears to be a judicious choice for obtaining the required freedom
from porosity.
To reduce the fabrication problems, the same fabric for both
the membrane and the inflatable members may be used.
The emphasis on minimum total recovery system weight ne-
cessitates the consideration only of cloth woven from high-strength
fibers. The four fibers showing outstanding strength are nylon, dacron,
Fortisan-36 and fiberglass As yet, Fortisan-36 is not available as a
coated cloth. Coated fiberglas cloth has extremely poor crease resist-
ance. Thus, the base material choice is limited to nylon and dacron.
Of all cloth weaves, the plain weave is the most efficient.
Equal strength in both the warp and the fill direction may be stipulated as
a design requirement leading to the choice of a balanced plain weave
fabric.
Coated cloth strengths of 150 pounds per inch may be obtained
in an uncoated cloth weighing approximately three ounces per yard. To
obtain adequate impermeability to air, the coating weight will be two to
three times the weight of the base cloth. Material requirements, there-
fore, for the wing membrane and for the inflatable tubes are stipulated
as being coated cloth, made from a balanced plain weave nylon or dacron
fabric, with an integral coating impervious to air, with a total weight of
approximately twice the weight of fabric required for strength, and avail-
able on an off-the-shelf basis.
A second materials selection problem involves the lines used
to attach the recovery vehicle to the re-entry body. The requirements
are high strength, lightweight, easy packaging, good energy-absorbing
qualities and minimum deflection. Available materials included nylon,
dacron, polyester, polypropylene and steel lines, each available in sev-
eral different forms. Since the base material has Significantly more
effect on the properties of the line than does the type of construction, em-
phasis was placed on the characteristics of the line material rather than
the line construction.
To be usable in a recovery vehicle, the membrane and in-
flatable tube materials must possess certain characteristics. These
include:
Flexibility
Ability to distribute loads
Crease resistance
High strength
Lightweight
Minimum deflection under load (high modulus)
5-46
5-47
Tear resistance, notched tear resistance
Abrasion resistance
Very low air permeability
Each of these factors must be taken into account in arriving at
a final material selection.
The materials chosen should result in a vehicle with the
lowest over-all cost consistent with mission requirements. This is in-
fluenced, not only by initial material costs, but very strongly by fabrica-
tion costs. Cost areas which must be considered in selecting the coated
fabric included:
JOining co sts
Technical support
Specialized equipment
Expendable materials
Repair costs
Joining costs may be influenced by requirements such as sur-
face preparation, adhesive open time, lay-up time, follow-up treatments
(rolling, heat curing), adhesive cost, adhesive pot life, cure time, joint
width, salvaged edge trim loss, and care required in handling.
Technical costs are determined by such items as the time re-
quired to develop procedures for joint preparation, adhesive application
and adhesive curing cycles, technical assistance during fabrication, sup-
porting costs (e. g., mixing adhesive), and quality control costs.
Equipment costs would include any specialized equipment re-
quired to fabricate the unit. Items considered were drying ovens, heat-
sealing equipment, joint rolling devices, adhesive storage facilities, lay-
up tables, and work area requirements.
Expendable material costs can be influenced by the solvents
used for cleaning, the materials required to prepare the joint prior to
joining, and the applicators used to apply the adhesive.
Repair costs are dependent on the reliability of the joint, the
./.
ability of the material and the joint to withstand damage, and ease with
which a damaged area may be repaired.
Approximately 10 candidate materials from cloth manufac-
turers and cloth coating firms were obtained and given preliminary
screening tests. Of these, two materials were found which adequately
met the specified requirements for the membrane and inflatable tube
structures. These were a neoprene-coated nylon fabric and a polyester-
coated dacron fabric. Both of these materials seemed well suited for
wing design.
Samples of these two materials (both coated by Minnesota
Mining and Manufacturing Co., Irvington Division, Monrovia. Calif.)
were obtained, each in two different material weights. The manufac-
turer's designation, the nominal base cloth weight, and the nominal
coated fabric weight, are listed below.
NN4110
NN4116
DD7
DD15
Neoprene-coated nylon
2.5 oz/yd base cloth
Total weight 10 oz/yd
Neoprene-coated nylon
5 oz/vd base cloth
Total weight 16 oz/yd
Polyester-coated dacron
3. 5 oz/yd base c l ~ t h
Total weight 70z/yd
Polyester-coated dacron
7. 5 oz/yd base cloth
Total weight 15 oz/yd
In order to make a final material selection and to determine
design allowables, several tests were run on the coated nylon and dacron
fabrics.
Parent material and lap shear joint tests were performed.
Joints were made in the nylon/neoprene material using Bostick 1008.
Joints were made in the dacron/polyester material using Minnesota
Mining and Manufacturing Co. EC-2134 adhesive. Both of these adhe-
sives are catalyzed types thinned with a volatile solvent. Each adhesive
forms a chemical bond with the coating material with which it was used,
5-48
5-49
resulting in a high joint efficiency. In actuality, characteristic failures
occurred at the fabric-coating interface rather than at the adhesive-
coating interface. Strengths of up to 100 psi were obtained in the nylon/
neoprene material and of up to 300 psi in the dacron/polyester material.
These strengths and the mode of failure also point up the superior ad-
herence of the polyester coating.
Average results obtained for parent material one-inch-wide
test strips, both notched and unnotched, were as follows:
Breaking Strength,
* Lb/Inch
Weight Notched Strength, N/UN
Material Oz/Yd Warp Fill ** Lb/Inch (Fill)
Ratio
Nylon/neoprene 10 130 (13) 100 (10)
Nylon/neoprene 16 335 (21) 265 (17)
40 (2.5) 0.15
Dacron/polyester 7 160 (23) 150 (21)
60(8.6)
0.40
Dacron/polyester 15 300 (20) 240 (16)
*
One-inch-wide ravel-strip method
** One-inch-wide-cut-strip method with 1/4 inch knife slit each side
Note: Numbers in ( ) give strength per oz/yd of cloth weight.
The breaking strength/weight ratio was comparable for all
but the 10 ounce nylon/neoprene. It should be remembered that the cloth-
to-coating weight ratio is lower for the 10 ounce nylon/neoprene and
higher for the 7 ounce and the 15 ounce dacron/polyester.
The notched strength of the dacron/polyester is very impres-
sive when compared to that of the nylon/neoprene, being 3.5 times as
great when the relative material weights are taken into account.
Only adhesive joints were considered for use, as previous
tests had shown that sewed joints, or adhesive bonded plus sewed joints,
develop lower lap shear joint efficiencies than straight adhesive joints.
This was due to the effect of the needle holes (whether using a round or a
chisel point needle) which acted much like the perforated tear lines used
to score paper for easy tearing. It should be remembered, however,
that the peel strength of adhesive joints is generally low. Sewing can
result in a marked improvement in peel joint strength. The recommended
practice is, however, to design with all joints in lap shear.
The breaking strength was determined for each of several
ropes. These were as follows:
Breaking Strength
Diam. Wt/Ft. Lbs per
Material Inches Oz. Pounds Oz./Ft.
Nylon-soft lay 1/4 0.23 1735 7540
Nylon-hard lay 1/4 0.28 1855 6620
Dacron/nylon core 5/16 0.51 1510 2960
Nylon/nylon core 5/8 1. 60 8340 5210
Cotton sash cord 1/4 0.34 285 840
Nylon para. line 1/8 0.062 515 8310
Polyethylene 5/16 0.32 1815 5670
Polypropylene 1/4 0.16 915 5720
Dacron 1/4 0.32 1525 4760
Steel cable (SS) 1/8 0.50 1875 3750
The most efficient ropes were basically nylon. The poly-
ethylene and polypropylene ropes showed good efficiency, and next in
order were dacron and steel. The cotton rope was inefficient.
A very important property of any material is the tensile mod-
ulus. Although fiber-based materials do not show a modulus which can be
stated as a single value as for metallic materials, a plot of load vs.
strain is very useful. In the present application, a low deflection under
load is considered desirable in both the fabric and in the lines.
Autographic load-strain curves were obtained for several
fabrics, using a four-inch gauge length. These are shown in Figures
5. 19 and 5. 20. Note that the values have been adjusted to a 10 ounce
cloth weight for comparison purposes. As shown in the Figure, the
5-50
250
g::;-
:r:
9
iil
CURVES MATERIAL & WEIGHT
~
:r:
NO COATING OZ/YD
E-<
0
>-< 1 NYLON/NEOPRENE 16
0
q
2 NYLON/NEOPRENE 10
1
:>t
3 UNCOATED FORTISAN-36 8.5
g::;-
200
IJI
CIl
:r:
"- 3
C!l N
......
0
>LI
~
0
......
:r:
0
E-<
E-<
0
q
>-<
0
>LI
...
E-<
0
0
>LI
q
p:;
:>t
p:;
"-
0
N 0
0 150
0
.-<
:r:
0
E-<
E-<
13
q
~
>LI
:r:
E-<
CIl 0
:::> z
"'"
......
"-
~
CIl
>Q
>-<
:r:
q
E-<
<t:
13
100
0
>-<
~
...
0
:r:
0
z
......
"-
u5
>Q
>-<
~
0
>-< 50
o .025 .050 .075 .100 .125 .150 .175 .200 .225 .250
STRAIN. INCH/INCH
Figure 5. 19 Load - Strain Curves for Fabric Adjusted to Constant Cloth Weight
5-51
E-<
:r:
0
I-<
I'<
:r:
E-<
0
U
0
c:1
:>-<
"'"
N
0
0
.--<
0
E-<
c:1
I'<
E-<
Cf1
""
c:1
S
:r:
E-<
c:1
I-<
0
:r:
u
Z
I-<
IQ
ci 0
,.....{
<5 p:)
,.....{
<:.0
ZI
c(-
250
MAT'L & COATING
NO.
I I
1 UNCOATED DACRON
2 UNCOA TED DACRON 3.5
3 DACRON/POLYESTER 9.5
4 DACRON/POLYESTER 8.9
5 DACRON/POLYESTER
6 DACRON/POLYESTER
200
NOTE: CURVES ABOVE THIS NOTE
ARE FOR MATERIAL TESTED IN THE
50 DIRECTION NOTED. CURV ES BELOW
THIS NOTE ARE FOR MATERIAL
TESTED AT 45
0
TO THE FILL DIRECTION.
o .025 .05 .075 .100 .125 .150 .175 .200 .225 .250
STRAIN, INCH/INCH
Figure 5. 20 Load - Strain Curves for Fabric Adjusted to Constant Cloth Weight
5-52
5-53
deflection under load generally is lowest for Fortisan - 36, higher for
dacron and highest for nylon. As might be expected, cloth tested on the
bias showed a markedly higher deflection under load.
Manually recorded load-strain curves were obtained for sev-
eral ropes, using a 20 inch gauge length. These are shown in Figures
5.21 and 5.22. Note that the values have been adjusted to an 1800 pound
breaking strength for comparison purposes. The deflection under load
was lowest for the stainless steel, higher for the dacron, cotton, poly-
ethylene and polypropylene, and highest for the nylon. However, the
sheath-core type construction produced significant reductions in deflec-
tion under load for the dacron/nylon and the nylon/nylon ropes.
A comparison of the energy-absorbing characteristics may be
obtained from Figure 5.23. On an ounce per foot of rope weight basis, the
area under each curve (up to the load per unit weight value of 2000 pounds
per .oz/foot of rope weight) is shown below.
Total Energy
Inch-Pounds per Inch
Material per Ounce/Foot of Rope
1/4 inch nylon (soft lay) 3.0
1/4 inch nylon (hard lay) 3.4
5/16 inch dacron/nylon core 1. 4
5/16 inch polyethylene 1. 2
5/8 inch nylon/nylon core 1. 8
1/4 inch dacron 2.0
1/4 inch polypropylene 1. 9
1/8 inch parachute cord 1. 9
1/4 inch cotton sash cord
1/8 inch 7 x 19 SS cable 0.9
C1
I
C1
~
fi)
Cl
z
::>
0
Po.
0
0
00
......
E-<
<
~
....
<
....
Cl
~
::>
0
:::
:Ii
0
:iJ
:::
~
Po.
0
p:;
.p:;
g,
rn
~
::>
0
Po.
~
0
~
2000
1600
1200
800
400
o
RYAN
__ 61B105
CURVE NO. TEST MATERIAL DIAM INCHES
1 NYLON (SOFT LAY) 1/4
2 NYLON (HARD LAY) 1/4
3 DACRON/NYLON CORE 5/16
4 POLYETHYLENE 5/16
f - ~ E-<
5 NYLON/NYLON CORE 5/8
.... "'I lC> "<I'
0 .... ~ M M "'I
t-
.... , "'I
~ N 0 0 0 0
0
:::0
rn
-:g ~
<0
"<I' .... 0')
lC> -,j<
.... Z
M M "'I "'I "'I
Cl .... 0 0 0 0 0 BREAKING LOAD
-,j<
J /
I /
I /
....
J
/
V
V
"'I
j
/
/ / / /
/ / / /'
//
;
V V
~ / /' /""
,
~
/ ./
V
~
~
L - - - ~
~
--
.050 .100 .150 .200 .250 .300 .350 .400
STRETCH, INCH/INCH
Figure 5.21 Load - Deflection Curves for Various Ropes Adjusted to Constant Rope Weight
-
100
80 ~
o
~
o
z
~
60 ~
gj
....
o
E-<
Z
40 ~
g
~
Po.
Cl
20 C3
~
o
c:.n
I
c:.n
c:.n
rn
f@
o
o
2000
E-<
<:
....:l
S 1600
o
::t:
u
-::t:
1200
il<
o
p::;
g
rn 800
f@
o
il<
o 400
....:l
o
RYAN
___ 61BI05
CURVE
1
I
DIAM. I E-<
::t: E-<
NO MATERIAL INCHES Uo ....
....:l-"
00 ." 00 C'-l C'-l
<:r.::lN
'"
.-< M C'-l M
0 N 0 0 0
6 DACRON 1/4
7 POLYPROPYLENE 1/4
8 PARACHUTE CORn 1/8
rn
9 COTTON SASH CORD 1/4
C'-l M to-
'"
." 10 7 x 19 SS CABLE 1/8
....:l<:U .-< <!) C'I C'-l M
<: ...... Z
0 0 0 0 0 ......
BREAKING LOAD
100
V
cp (8)
JJ
80 3
0
z
- 19 ) I / /
/ /
If
//
/
/
/ //
I / / Y
I / / //
/ / //
<:
p::;
60
0
E-<
Z
U
40 Il:<
Po.
/ Ih
V
/ A P
0
20 ....:l
1/
i
I
.050 .100 .150 .200 .250 .300 .350 .400 o
STRETCH, INCH/INCH
Figure 5,22 Load - Deflection Curves for Various Ropes Adjusted to Constant Rope Weight
c.n
I
c.n
0')
7000 I
E-<
:I:
0
f;l 6000
~
~
Po.
0
0::
r..
o 5000
E-<
r..
'-
N
0
0::
fil
Po. 4000
rn
;:l
0
Po.
~
:I: 3000
0
....
fil
~
E-<
....
S
0:: 2000
fil
Po.
~
0
~
1000
o
RYAN
__ 11_ 61BI05
CURVE NO. TEST ROPE
1 1/4 - INCH NYLON (SOFT LAY)
2 1/4 - INCH NYLON (HARD LAY)
3 5/16 - INCH DACRON/NYLON
4 5/16 - INCH POLYETHYLENE
5 5/8 - INCH NYLON/NYLON
6 1/4-INCH DACRON
8
7 1/4 - INCH POLYPROPYLENE
/
8 1/8 - INCH PARACHUTE CORD
9 1/4 - INCH COTTON SASH CORD
10 1/8 - MCH 7 x 19 SS CABLE
.050 .100 .150 .200 .250 .300 .350 .400 .450 .500
STRETCH, INCH/INCH
Figure 5.23 Load - Deflection Curves for Various Ropes Adjusted to Constant Rope Weight
5-57
The standard nylon rope has the best energy-absorbing char-
acteristics at the load level specified. The steel cable and the polyethyl-
ene showed the poorest energy-absorbing characteristics. The sheath/
core construction ropes showed poorer characteristics than did the same
rope materials with a standard lay.
The tests described above permit some insight into the prop-
erties of the fabrics. However, it is necessary to determine the inter-
action between the warp and the fill threads in order more properly to
compare the materials. This requires biaxial loading, which is most
readily accomplished using inflated cylindrical test samples.
Such samples were constructed from several coated fabrics.
The cylinders were eight inches in diameter and 24 inches in length.
These were tested at various pressures and loads while determining the
center-point load bending characteristics and changes in diameter and
length. The samples included fabrics of single and double thicknesses,
fabrics in the warp and fill directions, and fabrics cut on the bias at
various angles.
The bending characteristics of these tubes were determined
using hinged ends with zero end load, and with a concentrated tension
load applied at the center of the tube and perpendicular to the tube length.
The data obtained is shown in Figures 5. 24 through 5. 37. Note that this
data has been reduced to a constant cloth weight of 10 ounces for com-
parison purposes. An envelope line has been included indicating the
buckling point. (The ability to carry load does not stop at the buckling
point, however. The deflection curves follow smoothly down to the zero
load - zero pressure origin.)
As shown in these graphs, the dacron/polyester tubes will
carry considerably more load than the nylon/neoprene tubes for a given
deflection at a given pressure. From the standpoint of lowest deflection
under load at a given pressure, the warp was better than the fill, the
warp and the fill were better than the bias, the single ply was better than
the double ply, and the double ply at low bias angles was better than the
double ply at a 45 bias angle or at a 0 bias angle.
These same eight-inch-diameter tubes were tested under zero
external load to determine the change in length and the change in diameter
as a function of internal pressure. This data is shown in Figures 5. 38
through 5.41. Note that this data has been reduced to a constant cloth
weight of 10 ounces for comparison purposes. The dacron/polyester
ZI
-
~ I
showed lower deflections under pressure, both axially and circumferen-
tially, than did the nylon/neoprene. Cloth on a 45 bias showed large
circumferential increases, while decreasing in length. As the bias angle
increased, the circumferential deflection increased, while the length
decrease became more pronounced.
A potential fabrication method, promising low cost and light-
weight, is the use of a short, continuous cloth load member running the
length of the inflated tubes with grommets used as the attach points for
the cables. A series of tests was run to determine the strength which
might be developed with grommets. Pertinent information is shown in
Table 5.1. The sewn ring grommets were sufficiently strong and ade-
quately attached so as to cause parent material failure in all cloths. The
No.2 spur grommet was too small to consider for use. The No.4 and
No.6 spur grommets were satisfactory, with some exceptions. These
tests indicate that grommets could be considered for such an application.
Throughout the tests conducted, the dacron/polyester fabric
has almost invariably demonstrated more desirable properties for the
present application than has the nylon/neoprene fabric. Thus the dacron/
polyester fabric was chosen as the material to be used in the landing sys-
tem preliminary design.
On the basis of strength, energy-absorbing qualities and
availability, a soft-lay nylon rope was chosen for the attachment lines.
5-58
OJ
I
OJ
CD
Grommet Size
and Type
No. 4 sevm ring
6 sewn ring
2 spur
2 spur
4 spur
4 spur
4 spur
6 spur
6 spur
6 spur
RYAN
__ 11_ 61B105
TABLE 5.1
Failure Load, Pounds, and Failure Location for Material Shown
8 oz. Dacron/Polyester 14 oz. Dacron/Polyester
330 - edge of doubler 460 doubler
466 doubler
232 grommet torn loose 425 grommet
238 grommet torn loose
250 grommet torn loose 382 doubler/grommet
266 grommet torn loose 432 doubler/grommet
280 grommet torn loose 430 doubler/grommet
318 grommet torn loose 389 doubler/PM/grommet
340 grommet torn loose 442 doubler/grommet
363 grommet torn loose 390 doubler/grommet
ADHESIVE
~
3M 2134/2135
OR BOSTICK 1008
-I
10 oz. Nylon/Neoprene
215 doubler
189 grommet
174 grommet
184 doubler
239 doubler
234 doubler
230 doubler
244 doubler
233 grommet
.
:;g
-<
t--I
~
E-t
~
:;g
:;g
o
~
SIX STITCHES/INCH
NO. 69 DACRON THREAD
1/8-INCH EDGE DISTANCE
C'J
~
...-l
II @ I j
~ 2 . 7 5 I ~
TYPICAL JOINT
7.7 oz. Dacron/Polyester
262 doubler
212 grommet
234 grommet
269 doubler
242 doubler
241 doubler
239 doubler
235 doubler
244 doubler
OJ
I
Ol
o
RYAN
__ iOO_ 61B105
1 4 . r - - - - - - - r - - - - - - - . - - - - - - - . - - - - - - - ~ - - - - - - . _ - - - - - - . _ - - - - - - _ r - - - - - - _ . - - - - - - _ . - - - - - - _ .
H
(/)
P-i
A
~
(/)
(/)
~
~
H
<t:
Z
P:::
~
~
Z
H
1.0
INCHES OF CENTER
DEFLECTION
1
1.5 2.0 2.25
12 1 I. II 71 7
101 : I / Y/
~ BUCKLING OCCURS
BELOW THIS LINE
81 /1 IJ "/V
61 {}' /,,' ,.;11
/
41 JI /I 7'
/
/
/
21 / /i/ I I I
16 OZ. NYLON/NEOPRENE CLOTH
o !.rC'"
o
SINGLE-PLY TUBE
CLOTH CUT SQ.UARE
20 40 60 80 100 120 140 160
CENTER LOAD, POUNDS PER 10 OZ/SQ YD OF COATED CLOTH WEIGHT
180
Figure 5.24 Load - Pressure - Deflection Curves for Center-Loaded 26-Inch-Long Pressurized Tube Values
Adjusted to Constant Coated Cloth Weight
200
OJ
I
0:>
to-'
ifl
P,
ifl
ifl
RYAN
___ 61B105
INCHES OF CENTER DEFLECTION
I
2.25
101 1.0 11.5 1
I i I ., . -) 1 I 1
7 7
8 1 I 1 W I I I ......
I r r ""'"
BELOW THIS LINE
61
H I "'" II I'
z r
'" .. k'
,
z
E-; 41
I I
Y I /1 77-- , ,.
10 OZ. NYLON/DEOPRENE CLOTH
DOUBLE-PLY TUBE
21 1 J :A= 7' 1 CLOTH CUT AT 45
0
ANGLE
OPPOSING REGISTRY
I.e:: I I I I I I
o 20 40 60 80 100 120 140 160 180 200
CENTER,LOAD, POUNDS PER 10 OZ/SQ YD OF COATED CLOTH WEIGHT
Figure 5.25 Load - Pressure - Deflection Curves for Center-Loaded 26-Inch-Long Pressurized Tube Values
Adjusted to Constant Coated Cloth Weight
CJ1
I
0':>
I:\:)
RYAN
__ mi. 61BI05
16
14
INCHES OF CENTER
DEFLECTION
12
.....
rn.
P<
A 10
~
~
....,
rn.
rn.
~
~
8
P<
>-4
.0::
Z
~
~
~
6
Z
.....
1.0 1. 25 1.5 1. 75 2.0 2.25
I
,
j
J
~
I I
J /
IJj
VI' BUCKLING OCCURS
/ BELOW THIS LINE
J
/ V /
,
/
/
/
/
VI
/
/
/
I
/
~
~
,,,/"
,/
10 OZ. NYLON/NEOPRENE CLOTH
DOUBLE-PLY TUBE
~ /
,
CLOTH CUT SQUARE
-
/
CONFORMING REGISTRY
./
I I I
4
2
o
o 20 40 60 80 100 120 140 160 180 200 220
CENTER LOAD, POUNDS PER 10 OZ/SQ YD OF COATED CLOTH WEIGHT
Figure 5.26 Load - Pressure - Deflection Curves for Center - Loaded 26 - Inch Long Pressurized Tube Values
Adjusted to Constant Coated Cloth Weight
01
I
0')
~
RYAN
__ 111_ 61BI05
12. 0;5 1.,0, 1.25 ~ . 5 \,75
I I :;.#" I / I j7 I 10 1 1 ,
.....
r:I'J.
~
~ f 81 I I II /:/7""1/ ' BELOW THIS LINE
~
::;J
r:I'J.
r:I'J.
~
~ 61 1 I ' Y - -I
~ r ~ >
H
~
~
E-l 41 II Y::o#'" c
?:i
2 I: :Y= .." 10 OZ. NYLON/NEOPRENE CLOTH
DOUBLE-PLY TUBE CLOTH CUT
AT 30
0
ANGLE OPPOSING REGISTRY
o .,.....- I , , I ! , I I I
o 20 40 60 80 100 120 140 160 180
CENTER LOAD, POUNDS PER 10 OZ/SQ YD OF COATED CLOTH WEIGHT
Figure 5. 27 Inches of Center Deflection
200
V1
I
0':>
~
......
rn
p..,
r:.:l
rn
rn
r:.:l
p:;
p..,
H
-<
Z
p:;
r:.:l
E-<
Z
......
RYAN
__ WI. 61BI05
12
10
. INCHES OF CENTER
DEFLECTION
1.0 1.5 2.0 2.5 2.75 3.0
8
6
BELOW THIS LINE
4
"".."
...."
...."
2
-
16 OZ. NYLON/NEOPRENE CLOTH
SINGLE-PL Y TUBE
CLOTH CUT AT 45 ANGLE
o 20 40 60 80 100 120 140 160 180 200 220
CENTER LOAD, POUNDS PER 10 OZ/SQ YD OF COATED CLOTH WEIGHT
Figure 5. 28 Load - Pressure - Deflection Curves for Center - Loaded 26 - Inch Long Pressurized Tube
Values Adjusted to Constant Coated Cloth Weight
240
I
Uj
Ilt
~
~
00
00
~
~
~
<:
Z
~
~
E-t
Z
1-1
5-65
14
INCHES OF CENTER
DEFLECTION
12
1.0 1. 25 1.5 1. 75 2.0
10
8
6
4
//;
A BUCKLING OCCURS
t/!;/
BELOW THIS LINE
J J ./
/
If;
://
~ /
h
i'//
/
16 OZ. NYLON/NEOPRENE CLOTH
//r
DOUBLE-PLY TUBE
-
~
.. CLOTH OUT SQUARE
CONFORMING REGISTRY
/ I I I
2
o
20 40 60 80 100 120 140 160
CENTER LOAD, POUNDS, PER 10 OZ/SQ YD OF COATED CLOTH WEIGHT
Figure 5.29 Load - Pressure - Deflection Curves for Center - Loaded 26 - Inch
Long Pressurized Tube Values Adjusted to Constant Coated Cloth.
Weight
Ql
I
m
m
......
U)
Ili
i;I.:l
IX<
::;J
U)
U)
i;I.:l
IX<
Ili
H
<t:
Z
IX<
i;I.:l
E-<
~
RYAN
__ 11_ 61BI05
I
INCHES OF CENTER
DEFLECTION
0.5 1.0 1. 25 1.5 1. 75
10
8
6
4
12
I
;;
6UCKLING OCCURS
BELOW THIS LINE
//
~
)
/-
~
}:
V/
/
~
,
/
./
10 OZ. NYLON/NEOPRENE CLOTH
./
~ /
DOUBLE-PLY TUBE CLOTH CUT
--
/-
.
SQUARE (ONE LAYER) CLOTH CUT
",/
AT 45 ANGLE (ONE LAYER)
I I I I
2
o 20 40 60 80 100 120 140 160 180 200 220 240
CENTER LOAD, POUNDS PER 10 OZ/SQ YD OF COATED CLOTH WEIGHT
Figure 5.30 Load - Pressure - Deflection Curves for Center - Loaded 26-Inch-Long Pressurized Tube Values
Adjusted to Constant Coated Cloth Weight
Cl1
I
Cl':>
-1
......
rn
P-t
~
rn
rn
~
~
P-t
..-l
~
~
~
E-<
~
RYAN
__ 1m. 61B105
12
10
INCHES OF CENTER
DEFLECTION
8
6
BELOW THIS LINE
4
.......
---
2
10 OZ. NYLON/NEOPRENE CLOTH
SINGLE-PLY TUBE CLOTH CUT AT
45
0
ANGLE
I
o
40 60 80 100 120 140 160 180 220 240 200 20
CENTER LOAD. POUNDS PER 10 OZ/SQ YD OF COATED CLOTH WEIGHT
Figure 5.31 Load - Pressure - Deflection Curves for Center-Loaded 26-Inch-Long Pressurized Tube Values
Adjusted to Constant Coated Cloth Weight
~
I
m
CJJ
.....
00
P-i
J;;:l
~
00
00
J;;:l
p::
P-i
H
~
p::
J;;:l
E-<
i5
RYAN
__ 111_ 61BI05
mCHESOFCENTER
DEFLECTION
12\ 711.0 II} . I 231 \ ~ . ~ J J
101 J 1 l 7 / :/ 74
81 / / .."f'" 1-........ b-""-
61 / I / :/ I ...... S........- I
BELOW THIS LmE
41 V / :$"
21 1 / I ~ : J , . " 10 OZ. NYLON/NEOPRENE CLOTH
SINGLE-PLY TUBE CLOTH CUT SQUARE
20 40 60 80 100 120 140 160 180 200 220 240
CENTER LOAD, POUNDS PER 10 OZ/SQ YD OF COATED CLOTH WEIGHT
Figure 5.32 Load - Pressure - Deflection Curves for Center-Loaded 26-Inch-Long Pressurized Tube Values
Adjusted to Constant Cqated Cloth Weight
01
I
m
<:D
.....
rI1
0..
rI
~
~
rI1
rI1
rI
~
0..
..:.l
<r::
Z
~
rI
E-<
~
RYAN
__ iii. 61B105
INCHES OF CENTER
DEFLECTION
10
8
6
4
12
0.5 1.0 1.5 2.0
/
il
V
V
/
/ / /
V
V
/ V .-
V
I
/
~
v---
/ / /
I 7
v
v
~
\
~ / BUCKLING OCCURS
/ ~
BELOW THIS LINE
"",
/
V
~
V/
/ ~
~ " " ,
",,/
7 OZ. DACRON/POLYESTER CLOTH
If
V ~ ~
~ /
SINGLE-PLY TUBE CLOTH CUT SQUARE
.. ---
J
~
~
2
o
20 40 60 80 100 120 140 160 180 200 220 240
CENTER LOAD, POUNDS PER 10 OZ/SQ YD OF COATED CLOTH WEIGHT
Figure 5.33 Load - Pressure - Deflection Curves for Center-Loaded 26-Inch-Long Pressurized Tube Value
Adjusted to Constant Coated Cloth Weight
Q1
I
-;J
o
......
00
1=4
.
riI
~
00
00
riI
re
..:l
<
Z
P:<
riI
Eo-<
Z
......
1
12
10
8
6
RYAN
__ iii. 61B105
0.5
INCHES OF CENTER
DEFLECTION
0.75 1 11.0
41 I 1 / /1 ~ j;."""'-: 1
J r ~ "
1. 25
7.7 OZ. DACRON/POLYESTER CLOTH
I V./ I / b - ~ I ~ SINGLE-PLY TUBE
2 ~ :7 ~ - CLOTH CUT SQUARE
(FILL PARALLEL TO LENGTH)
0"-4=:-""- I 1 I I 1
20 40 60 80 100 120 140 i60 180 200 220 240
CENTER LOAD, POUNDS PER 10 OZ/SQ YD OF COATED CLOTH WEIGHT
Figure 5.34 Load - Pressure - Deflection Curves for Center-Loaded 26-Inch-Long Pressurized Tube Values
Adjusted to Constant Coated Cloth Weight
CJl
I
"'l
~
RYAN
___ 61BI05
INCHES OF CENTER
DEFLECTION
12
....
~
~
f
10
Ul
Ul
~
g:
~
8
...::
Z
0::
~
Eo-<
Z
>-<
6
4
0.5 0.75 1.0 1. 25 1.5
I /
/
l
v
V
/ ~ I
I
/ /
V
"-
/
BUCKLING OCCURS
/
BELOW THIS LINE
I
I
/
V
h ~
'l
/ /
I
/ / b
~
/
i
./
/ /
?//
I
/
./
/'
/
~
"'"
"
I /.
","'"
13.8 OZ. DACRON/POLYESTER CLOTH
jF
~ '
SINGLE-PLY TUBE
;... CLOTH CUT SQUARE
I I I I
- '--- -
15
2
o 20 40 60 80 100 120 140 160 180 200 220 240
CENTER LOAD, POUNDS PER 10 OZ/SQ YD OF COATED CLOTH WEIGHT
Figure 5.35 Load - Pressure - Deflection Curves for Center-Loaded 26-Inch-Long Pressurized Tube Values
Adjusted to Constant Coated Cloth Weight
OJ
I
-.;)
I:\:)
ra
0...
>il
~
;::>
V1
V1
>il
~
H
<t:
Z
~
>il
E-<
Z
.....
RYAN
".IIM. 61BI05
121 0.5
I,
10
8
6
4
INCHES OF CENTER
DEFLECTION
I I ~ . - 11 ~ .
11 71
1-5
21 / / 70-""""""'" I 7.7 OZ. DACRON/POLYESTER CLOTHt-J ---+----+----t
SINGLE-PLY TUBE CLOTH CUT SQUARE
(WARP PARALLEL TO LENGTH)
o 20 40 60 80 100 120 160 200 220 240
CENTER LOAD, POUNDS, PER 10 OZ/SQ YD OF COATED CLOTH WEIGHT
Figure 5.36 Load - Pressure - Deflection Curves for Center-Loaded 26-Inch-Long Pressurized Tube Values
Adjusted to Constant Coated Cloth Weight
crJ
I
-J
~
>-I
OCJ
O-t
~
OCJ
OCJ
~
p::
O-t
H
<
Z
p::
~
~
Z
>-I
RYAN
__ li_ 61BI05
INCHES OF CENTER
DEFLECTIDN
I
0.5
10 I ., I , I 7
0.75 1.0
8
6
V I IX
BUCKLING OCCURES
BELOW THIS LINE
4
2 I ~ ~ 7.7 OZ. DACRON/POLYESTER CLOTH
DOUBLE- PL Y TUBE
CLOTH CUT AT 18 ANGLE
OPPOSING REGISTRY
0' ,...........-
o 20 40 60 80 100 120 140 160 180
CENTER LOAD, POUNDS PER 10 OZ/SQ YD OF COATED CLOTH WEIGHT
Figure 5.37 Load - Pressure - Deflection Curves for Center-Loaded 26-Inch-Long Pressurized Tube Values
Adjusted to Constant Coated Cloth Weight
:Ii
C)
Z
......
"-
:Ii
C)
z
......
~
u:J
<
~
~
C)
Z
......
....<
<
~
Z
~
~
~
,...
~
:::>
C)
~
......
C)
5-74
CURVE) NO. MATERIAL & ) SINGLE LA Y E ~ NO. OF I CLOTH I
COATING WEIGHT, OZ/YD LAYERS ANGLE
.20
1 NYLON/NEOPRENE 16 1 0
t--
2 NYLON/NEOPRENE 10 2 45/45
3 NYLON/NEOPRENE 10 2
0%
4 NYLON/NEOPRENE 10 2 30/30
5 NYLON/NEOPRENE 16 1 45
I--
6 NYLON/NEOPRENE 16 2
00/00 --5
.18
.16
.14
.12
.10
.08
.06
/
/'
/'
L_ 2
V
V
V
/
/
V
V
/
/ v
/'
/
4
/ ~
V
L 3
/ ~
V
~
------
~ /
I
~
~
~
/ ~
-
1
......
~ - -
~
_1
V-
.04
.02
o
1 2 3 4 5 6 7 8 9
PRESSURE, PSI, PER 10 OZ/SQ YD OF COATED CLOTH WEIGHT
Figure 5,38 Circumferential Length Change vs Pressure 8-Inch-Diameter by
23-Inch-Long Tubes Values Adjusted to Constant Coated
Cloth Weight
10
::r:
U
Z
.t:::
::r:
u
z
......
~
0Cl
~
~
~
U
~
...:I
~
~
Z
~
~
~
rz..
:E
:;:J
u
f:5
U
.20
CURVE NO. MATERIAL & SINGLE LAYER NO. OF CLOTH
COATING WEIGHT, OZ/YD LAYERS ANGLE
7 NYLON/NEOPRENE 10 2 45 /90
.18 8 NYLON/NEOPRENE 10 1 45
9 NYLON/NEOPRENE 10 1 0
10 DACRON/POLYESTER 7 1 0
11 DACRON/POLYESTER 7.7 1 90
.16 12 DACRON/POLYESTER 7.7 1 0
13 DACRON/POLYESTER 13.8 1 0
14 DACRON/POLYESTER 7.7 2
.14
.12
10
.08
.06
.04
PRESSURE, PSI, PER 10 OZ/SQ YD OF COATED CLOTH WEIGHT
Figure 5.39 Circumferential Length Change vs Pressure 8-Inch-Diameter by
23-Inch-Long Tubes Values Adjusted to Constant Coated
Cloth Weight
5-75
.06
.05
SINGLE LAYER CURVE NO. MATERIAL &
COATING
WEIGHT, OZ/YD NO. OF LAYERS
I
1 NYLON/NEOPRENE 16 1
2 NYLON/NEOPRENE 10 2
3 NYLON/NEOPRENE 10 2
I-- 4
NYLON/NEOPRENE 10 2
CLOTH ANGLE
I I
0
0
45
0
/45
0
0
0
/0
0
30
0
/30
0
5 NYLON/NEOPRENE
16 1 45
0
V
6 NYLON/NEOPRENE
16 2 0
0
/0
0
./
.04
$' .03
E-<
c.:J
Z
~
H
L
::c: 0
1 ~
~
~
::c:
u
z
....., -.0
\
~
rn
-<
~
p:;
~ -.02
.....,
::c:
E-<
c.:J
Z
;j -.0 3
-.04
-.0 5
-.0 6
o
V
V
~
V
V
6
~
V
/3
V
V
~
,
~
~
---- /'"
~
~
~
I
I
----
F:::-
f--
5
~
r---.
1\
4
'\
~
~
'"
"""
~
i-----
r--2
1 2 3 4 5 6 7 8 9
PRESSURE, PSI, PER lO OZ/SQ YD OF COATED CLOTH WEIGHT
Figure 5. 40 Axial Length Change vs Pressure 8 -Inch -Diameter by 23-Inch
Long Tubes Values Adjusted to Constant Coated Cloth Weight
5-76
10
CURVE NO.
MATERIAL &
COATING
.06
7
8
9
.05
10
11
12
SINGLE LAYER NO. OF CLOTH
WEIGHT, OZ/YD LAYERS ANGLE
10
10
10
7
7.7
2
1
1
1
1
00 7
0
90 V
0
13
.04
14
NYLON/NEOPRENE
NYLON/NEOPREN E
NYLON/NEOPRENE
DACRON/POLYESTER
DACRON/POLYESTER
DACRON/POLYESTER
DACRON/POLYESTER
DACRON/POLYESTER
7.7
13.8
7.7
1
1
2
O /
18
/"
./
I
___
o I - ____
B
:
---:: .2!
B 0
Z
.t:::
::c
u
Z
rO
I
"',
..
14
;L:
I '""
-< -. 0:)
.......... r----r----
o 2 3 4 5 6 7 8 9
PRESSURE, PSI, PER 10 OZ!SQ YD OF COATED CLOTH WEIGHT
Figure 5.41 Axial Length Change vs Pressure 8-Inch-Diameter by 23-Inch
Long Tubes Values Adjusted to Constant Coated Cloth Weight
10
5-77
SECTION 5.8
DEPLOYMENT SYSTEM
TABLE OF CONTENTS
Section Page
5.8.1 Sequencing, 2-Stage System 5-80
5.8.2 Sequencing, Single Stage System 5-85
5.8.3 System Selection 5-85
5-78
SECTION 5.8
DEPLOYMENT SYSTEM
Recovery system activation, deployment initiation, and sub-
sequent sequencing of events, are designed to the environmental con-
ditions of pad escape and abort modes in addition to the subsonic regime
of the basic re-entry trajectory profile. These functions are controlled
by timing sensors (activation and sequencing) and an altitude sensor for
automatic deployment initiation. However, at the discretion of the pilot,
manual initiation is possible sooner than automatically scheduled or in the
event of failure of the automatic system to respond. The pilot is restrict-
ed, however, in initiating recovery at supersonic speeds and at a dynamic
pressure level greater than the design value of 54 lbs. /sq. ft.
Automatic initiation of the recovery sequence occurs upon
descent of the spacecraft below a pre-established reference altitude of
40,000 feet for most off-pad aborts and re-entry missions, sensed by on-
board Doppler instruments. Automatic initiation from on-pad abort con-
ditions occurs near apogee when activation and initiation occur simultan-
eously. The reference altitude provides adequate time to complete the
sequence and realize controlled equilibrium flight within a safe margin
for manual over-ride and/or ultimate emergency escape of the crew.
Deployment of the flexible wing utilizes a first stage parachute
to extract the wing, and various reefing techniques for sequential system
operation described in the following paragraphs. System operation is
depicted by Figures 5.42 and 5.43. The associated schematic diagrams
are presented in Figures 5.44 and 5.45.
Since altitude referencing is sensed to initiate automatic de-
ployment, the system must be deactivated, to avoid premature operation,
during preparation for launch and during the initial boost phase. This is
accomplished by an electronic timer zero-referenced to apogee where the
time delay allows for capsule stabilization and escape tower separation.
Mter a predetermined time interval the automatic system is activated.
The recovery sequence is initiated by an electrical pulse from
the altimeter reference or by crew command. This signal ejects the
compartment cover enclOSing the recovery unit. Positive release and
separation is assured by forceful ej ection.
5-79
5-80
5.8.1 Sequencing, 2 - Stage System
a. Parachute Deployment - Separation from the spacecraft
of the compartment cover exposes to the airsteam a small pilot chute
which deploys a 14 foot diameter Ribless Guide Surface parachute. The
14 foot chute, initially reefed and attached to the keel near the midpoint,
extracts the wing. Parachute reefing is employed to minimize the dy-
namic loads and wing deployment kinetic energies.
b. Parawing Deployment - Immediately following the para-
chute deployment, the wing is extracted by the reefed parachute. To
prevent suspension line entanglement and minimize shock loads, the wing
is initially reefed, which is accomplished by a series of reefing lines
sized for the side-by-side inflatable members. An energy snubbing sys-
tem is provided in each of the vertical control arms. This snubber sys-
tem minimizes snatch loads during wing deployment and frees the control
bars from the sides of the spacecraft. Ignition of the wing gas generator
propellant is electrically triggered upon departure of the wing apex
from the floor of the compartment and/or by electrical command from the
crew in the event of the primary system failure
c. Parachute Disreefing - Following an approximate 2 sec-
ond interval referenced to line stretch of chute suspension lines, the para-
chute is disreefed. This time interval thus allows the wing to deploy, and
provides the necessary additional acceleration prior to parawing disreef-
ing.
d. Parawing Disreefing - Following a short deceleration
phase with the reefed wing and full opened chute configuration, the wing
is disreefed in two distinct phases: the first being the suspension line
extension, and second, the separation of the inflated tubular members
(keel and leading edges) from one another.
Detachment of the snubbing lines enables the wing's members
to rotate upward at a controlled rate to the full extended length of the
suspension lines. When complete rotation is reached, the parachute is
detached from the wing and re-directs its drag load, by means of a static
line, to effect release of the lateral bands confining the wing's tubular
members and membrane. Airflow directed within the folds of the wing
generates expansion pressures so that the wing develops its equilibrium
flying attitude.
r-
----------------------------------------------------__ GROUND LIN
/
0..-.----
(
'\ \\ II ". J J/
j
"/
) )) -:7"
POSlr,oN. OF" MIN.
S1NK RRoTE
1/
-
\:
C>lUTE lOS <a'"Ll'''':SO 6'1
PVIZOn::cu"HCS. f/,..O ruL\.:S
1<E.EFtNG. L.Nez. FROM \lJllIlfd
/
i
I
i! ,.
I!
tl'tRGo FCIi l'VJo,.t,AFT:
IeEEL 11;) Alla'w'
'WINt;. TO RISE. RT CONSTFINT
RI'ITE
!
UN REEFED
AFTE.Q, 1"iR-AT.ON. OF WING
1).;1
L.IE.S REtER:.EO 6"1
RFTEit LNF"LRT,O'-f
CONTl&1. OE?I.O"IIO
G- NELlTlffiLlZ:E.O \tl F"CJll.O'IJ
u
,I e.,.
II !I
o
PIL.OT C:l-hlTE
CI-IIJTE (IN (ONO,l'"1o..t)
"'"'U"
Figure 5.42 Apollo Recovery System - Streamed Deployment
5-81
--'
CG. fN /1FT ;::OSITION
FOR LANDING FLARE. OUT
___________________________ GROUND ReF LIN.
/
, , , j,
POSITION OF MIN SINK
RATE $ STEADY .sTATE: GLIDE
r
WING RFE.D TO 250FT
DIA PARACHUTE JVR A ffR/ClD
TIED OrF RISER LINES .ARE
FREED WITH PrROrCCIINlcs.
KEL t L.!ADING DGE.5 ARE
INFLATt:D .; WING ASSUMES
ATTITl./DE.
OF 2-4 S,CONDS t 1JIN D/SI?FLD
70 A5SUM 290FT OIA. FARACwr/:...
--------
l()CJF5 HELD IN RISER LINS
BY DPL05N /JOLT FITTINGS
ALTERNATE. - RISER UN.5 COULD
BE CONTROLLED BY RE:L5 IN5JD
CAP.50LE
DRAG CHuTE: t 8AG
SEPARATE fiif)M WIN'G
SLACK UNES TIED
OFF TO PRyNT FlVTTR
r
o
II
""--co
,I F\ pyVR IS RELI
Ilv I' RO TCHNIC5
II
DRAG CHUTE a;::r0r5
WING PACKED AS A
PARACHUTE. IN A BAG
Figure 5.43 Apollo Recovery System - Parachute Deployment
5-82
01
I
00
""
RYAN
__ iii. 61BI05
h-<::h
)
RADAR h < 0 ..
ELECTRONIC
At > Atl
RADAR
ALTIMETER
-
th>O
DEPLOYMENT I PILOT
i '" CHUTE
SEQUENCE 'JDEPLOY.
...
TIMER
ALTIMETER
-
t .dt-<:: Atl
i
h > hl
DRAG
CHUTE
DEPLOY.
(REEFED)
i
At '5> 2
CUTTER
PARAWING
... DEPLOY.
(REEFED)
REEFING 1-1 _---.
At '5> 2
EXPLOSIVE
BOLTS
(COMPART.
COVER)
ELECT.
SWITCH
UNLATCH
CONTROL
BAR
SEQUENCE
INITIATE
WING
PRESS.
"-
V
At > At3 '" Ap > 0
FWD.
SNUB.
LINE
DISREEF
WING
(STAGE -1)
At > .dt41 DRAG DISREEF I GLIDE
1
WING CHUTE
SEPARATION (STAGE -2) I MODE
LANDING
NOTES:
T
AFT.
SNUB.
LINE
M
EMERGENCY -
PARAWING
SEPARATION
(1) M = MANUAL COMMAND OR OVER-RIDE
(2) P = PYROTECHNICS
ESCAPE
(3) .d t
4
> A t3
(4) hI = 40,000 FT.
Figure 5.44 Recovery System Schematic 2-Stage System
01
I
00
>f::..
RYAN
__ Wi. 6IBI05
LAUNCH
DEPLOYMENT
I
SEQUENCE
I Li t '- Li t I I h < he
RADAR In > 0 .. IELECTRONIC > e. RADAR ~
ALTIMETER TIMER ALTIMETER
EXPLOSIVE I DEPLOYMENT
BOLTS
(COMPART.
COVER) ISEQUENCE
h' >0
PILOT
CHUTE
DEPLOY.
Lit<Li l
UNLATCH
CONTROL
BAR
WING
Lit :>-4
h > 1
LANDING
ESCAPE
PARAWING
SEPARATION
DEPLOY. l.1t ; 6 .c
(REEFED CHUTEI
CONF.)
EXTEND
SUSPENSION
LINES
WING
DEPLOY
(GLIDE
CONF.)
GUIDE
..1t ~ 4
(6 CUTTERS)
NOTES:
(1) M = MANUAL COMMAND OR OVER-RIDE
(2) hI = 40,000 FT.
Figure 5.45 Recovery System Schematic I-Stage System
MODE
5-85
5.8 . 2 Sequencing, Single Stage System
a. Parachute Deployment - Separation from the spacecraft
of the compartment cover exposes to the airstream a 5 foot diameter
Ribless Guide Surface parachute which extracts the parawing, packed as
a parachute, contained in a deployment bag.
b. Parawing Deployment -- During the deployment process,
the suspension lines, followed by the membrane and tubular members,
unfurl and uniformly deploy from the deployment bag. (Refer to Figure
5.43.) Upon achieving complete line extension, the extraction parachute
and bag separate from the deployed wing by means of the break cord
which is connected between the deployment bag and the point on the wing
which last departs from the bag. This point is the centroid of the
effective (reefed wing) canopy area. Canopy reefing cutters are acti-
vated 4 seconds after complete deployment. The suspension line cutters
are activated 2 seconds later. and ignition of the gas generator is effected.
It is intended, therefore, to commence inflating the wing tubular mem-
bers immediately after deployment, since the estimated pressurization
period of 8 seconds is more than adequate to provide deceleration of the
Command Module to a velocity at which complete dis reefing of the wing
can be made.
c. Parawing Disreefing - Disreefing herein applies to com-
plete transition from a parachute type operation to an aerodynamic lift-
ing surface. This event occurs just prior to realization of a differential
pressure in the tubular members and becomes initiated upon extension
(pyrotechnics) of the six primary suspension lines.
5. 8. 3 System Selection - All associated factors must be considered
to establish the better of the two previously described potential methods
of parawing deployment. Categorically, these are encompassed by: a)
system performance, b) system reliability and c) system weight.
From the standpoint of performance, as shown in Figures
4.6 and 4.7, both methods are comparable below an altitude of 25,000 feet.
However, the single stage system (parachute type reefing) at higher
altitudes can complete the sequence sooner and with less altitude loss
than the alternate system. The importance, here, is the effects on glide
range performance and availability of more additional time or altitude for
attendant emergency crew escape.
Loads developed by either system approach the 7 g design
limit. The parawing incorporating non-parachute type reefing, although
more efficient in membrane stress sustention, induces asymmetrical
loads into the control bars. In addition, this type of operation requires
augmented load damping (hydraulic damper, snubbing lines, drag reel)
through various absorption devices which are not employed with a para-
chute type reefing.
Higher canopy stresses during parachute-type operation re-
quire use of 6 oz/ sq. yd. membrane material as opposed to 4 oz/ sq. yd.
used in the other design. Consequently, this results in 67 pounds more
weight for the canopy and suspension lines. This difference would di-
minish, however, due to varied subsystem requirements.
Reliability can be qualitatively compared by examination of
the deployment schematics (Figure 5.44 and 5.45), representative
number of elements therein, their individual reliability, and coupling
with the complete network. Although the aerodynamic characteristics of
the parachute-type wing may be impaired by radial reinforcing bands,
suspension line/material entanglement is minimized and insured wing
inflation enhanced by use of proven parachute techniques.
In view of the foregoing, the single-stage or parachute type
of reefing merits choice as the better method of wing deployment.
5-86
5-S7
SECTION 5.9
STRUCTURAL ANALYSIS
A preliminary stress analysis based on the loads presented in
Section 5.1 was conducted to substantiate the structural configuration and
verify system weights. The inflatable structure is designed for non-
buclding at limit loads. All other structure is designed to ultimate loads.
Only the inflatable members and the membrane are analyzed.
Refer to the parametric structural analysis in the Appendix for the
methods of analysis used.
Membrane
The membrane requirements are based on the hoop stresses
induced by the aerodynamic pressure.
aerodynamic pressure = p =
n W
z
S
= (10.5) (9500) = 48.5 LBS/FT
2
2060
hoop load = N = pR
= 48.5 x 10.5
510 LBS/FT
= 42.4 LBS/IN
A 4 oz/yd
2
dacron cloth impregnated with a polyester coating is used.
The strength of this fabric is SO lbs/in.
SO
M. S. = 42.4 -1 = 0.90
Inflatable Members
The inflatable members are designed such that the internal
pressure is sufficient to prevent buckling of the tubes under the glide
conditions.
Leading Edge Tube
DLE = 15
rt
unpressurized, 1W" pressurized
Longitudinal Membrane Stress
Bending Stress
MR
=
4.47 R
3
t
=
pR
-=
M
2t
2M M
=
2.235 R3
p =
4.47 R3
= pR
2t
M
4.47 R
2
t
Maximum Bending Moment = i2, 500 in-Ib, limit, glide condition
p =
12,500
= 10.9 psi
2.235(8)
3
Atmospheric pressure @ S. L. = 14. 7 psi
Absolute pressure ~ 26 psia
Keel Tube
The keel tube must experience the same pressure as the
leading edge tubes under the pressurization systems presented.
R3 = M
2.235 P
= 747
R = 9. I" (pressurized) = 8.5" (unpressurized)
Diameter required = 17"
5-88
5-89
Control Arms
Horizontal Arms
(Heat treated alloy steel to 220, 000
The horizontal arms are subjected to a concentrated lateral load of 1900
lb at the tip, and compression load of 5600 lb. A top-hat section is used
to facilitate stowing within the assembly.
I'"
2.0
..I
.75
1 PIN
.16
r DIA.
y =
1. 02
[
.20
_.t
2.0
.50
L
CROSS SECTION AT ARM HINGE
Section properties obtained on the basis of net area are:
A = 1. 052 I = 688 p = .81 in.
Bending strength
= 205 000 x 688 =
, 1. 02
138, 500 in. lb
For a cantilever beam subjected to a concentrated load at
the free end and a compressive axial load, the augmented bending
moment is given by M = Wj tan
max J
where j =
E I
P
Hence with j = 59.6 M =
max
=
=
-1900 x 59.6 x 1.116
-126,000 in.lb
126,000
= .91
138,500
50 . 2
With L ::::: - ::::: 61. 8 and gross area ::::: 1. 352 m
81
Column strength is given by
(286 x 10
6
)
F C A ::::: 1. 352 2::::: 101, 500 lb
61. 8
Hence MS. :::::
Main Post
giving R
c
:::::
5600
101500
1
-1 ::::: .04
055 + .91
= .055
2
The post is a steel tube heat treated to 200, 000 lb/ in. with
2-3/4" outside diameter and 083" thickness with
A
:::::
695 i n ~
p .943 in.
4
I
:::::
.619 in.
I
4
:::::
1.238 in.
p
I/y 45 in.
3
:::::
nit
:::::
33.15
Lateral load of 1900 lb (fully factored) at outer end of hori-
zontal arm produces a moment about the post longitudinal axis of 1900 x
50 ::::: 95,000 in. -lb inclined at 5 to the normal, results in a torque of
95,000 cos 5 ::::: 94620 in.lb, and a bending moment along the longitudinal
axis ::::: 95,000 sin 5 ::::: 8280 in.lb. The post further resists a centrally
applied compressive load of 11,020 lb.
Compressive Strength (F at 195, 000 I b / i n ~ )
cy
Using the standard end fixity factor for effective strut length gives
/
64 x .7 " 1
L' p::::: 9 ::::: 47.5 (1. e. m the short co umn range)
43
5-90
5-91
2 2
Then F CA = .695
195 000 _ 195000 (47.5)
, 2 6
4 X 29 X 10
= 83700 in.lb.and R =
c
11020
83700
= .132
Since D/t 50 the tube is not critical in local instability.
Torsional Strength (F at 121, 000 Ib/ in. 2)
su
T
max
= 125,000 x 1.238 =
1.375
112,500 in.lb.
94620
giving Rs = 112500 = .84
Bending strength (F at 18100 Ib/in.
2
)
ty
M = 181000 x .45 = 81500 in.lb.
max
. 8280
wlth ~ = 81500 =. 102
Using the standard margin of safety expression for com-
bined compression, bending and torsion
M. S.
= 2 _ 1
.102 + .132 + (.102 + .132)2 + 4 (.84r
2
1. 934 - 1 = 035
This result is considered conservative since the two main
posts are restrained in torsion by two yokes located equidistant between
the upper shaft and the main hinges.
Upper Shaft
In order to obtain the required stiffness, the EI value
achieved for the shaft is equal to that of the horizontal arms, and rsults
in a steel tube of 2 in. outside diameter and 375 in. wall thickness.
This flexuous stiffness was acquired in order to minimize
lateral deflection of the horizontal arms and the twist on the main posts.
Cable Support Member
In the parachute deployment case the forces in the horizontal
control cables will be zero, since the forward and rear rotating frames
will lie in the plane of the resultant of the forces in the wing suspension
cables.
The maximum force in the horizontal control cable occurs
during pitch control when the rear rotating frame lies at 112 from the
horizontal (see Figure 5.7) and the cable tension is 3200 lb.
With an ultimate 2 g factor, the cable tension then becomes
3200 x 2 x 1. 5 = 9600 lb., giving an axial load in the cable support
member = 2 x 9600 = 19200 lb. compression.
Simplifying the cross-section as shown
gives
A
I
xx
I
yy
. 2
= 1. 94 lll.
4
= 2.58 in.
= 1. 6
4
in.
L
Pmin = .91 in. and = 66 which is
p
l-
2.9
L
1
3
5
-1
Y
I
I
~ 1 . 3 ....
-
-
, I
t
Iy just in the
long col-
.16 Constant Thickness
umn range.
Using 7178 extruded alum. alloy gives a
column strength
2 6
= 1. 94 (IT x 10.3 x 10) = 45, 500 lb
66
2
with
M.S.
45500
19200 - 1 = ~
5-92
5-93
Since L/p value will be near the transitional value for the
material, a check on local instability gave crippling stress at 48,500
lb/in.
2
as compared to the Euler stress of 23,500 lb/in. 2. Margin in
the column strength is available to cover the event of an appreciable
side load acting together with a high axial compressive load.
SECTION 5. 10
WEIGHT ANALYSIS
TABLE OF CONTENTS
Section Page
5.10.1 Wing Weight
5-95
5.10.2 Flight Controls Weight
5-98
5.10.3 Single vs. 2-Stage System Weight 5-100
5.10.4 Comparison of Detail Weight Study and
Parametric Weight Analysis
5-103
5.10.5 Weight Summary
5-108
5.10.6 Group Weight Statement
5-94
SECTION 5.10
WEIGHT ANALYSIS
This weight analysis draws heavily on the experience gained
on the Saturn Paraglider and the Mercury Paraglider System studies
conducted by the Ryan Company.
5.10.1 Wing Weight
Wing Geometry
s = 0.574 i 2 (ft. 2) (Eq.1)
Wing Membrane Weight
Wing membrane requirements are based on the hoop tension
loads induced by the aerodynamic pressure on the membrane.
N=pR(#/ft)
W
N=-xR
S
N = hoop load per foot of width (#/ft)
P = Wing loading = W (#/ft2)
S
R = Radius of curved wing surface
(Eq. 2)
5-95
5-96
L. E.
KEEL L. E.
It can be shown that .R=0.175l (Eq. 3)
l = keel 19. (ft)
Therefore
N= W x (0.175 ) = 0.305JY.
0.574 l2 l
or
n W
N::::: 0.305 z (lbs.) (including a vertical
l ft. load factor)
(Eq.4)
where l = keel length (ft. )
n
z
= vertical load factor
W = gross weight lbs.
The following figure shows the relationship between strength
and weight for dacron cloth (coated with polyester to make the cloth
airtight).
16
N I ~
12
o ~
8
~ ~
4
0
0 100 200 300
Strength per Inch - Width, No - Ibs/in
Based on the figure, the membrane weight in oz/yd
2
is
given by:
(
ounces)
WM = 0.050 No yd
2
Where
and
No = required strength per inch
Eq. 4 is substituted for N
o
[
nz W Ibs.
W
M
= 0.050 0.305 . ft.
1 ft. ]
12 In.
The Apollo configuration gives:
. = 59 ft.
W = 95001bs.
[
7 x 9500 1] oz
WM = 0.050 0.305 x 59 12 yd
2
oz
W
M
= 1.43-
2
yd
(Eq. 5)
5-97
5-98
This material would give a membrane weight of:
2 oz
0.574 x 1.43--
2
2
=(074 59ft.
5 x 2
9 ft.
2
yd.
yd
xl 4 3 ~
. 2
yd
317 oz
= 19.8 lbs.
2 However, the minimum gage material presently available is
4 oz/yd. This gives:
WT
2
2000 ft.
2
1 yd
x --
2
9 ft.
4 oz. lIb.
x--x--
2 16 oz.
yd.
= 55.5 lb.
When the required gauge is available, a weight reduction of
(55.5 - 19.8) 35.7 lb. can be realized.
Total Wing Weight
The total wing weight (wing, cables, inflation system and
deployment) is 324 lb. This weight is compared to several systems in
Figure 5.46 which shows that the Flex Wing utilizes only 3.4 percent of
the gross weight as the supporting member (wing). This is smaller than
the percentage used by small and medium aircraft. This is to be expected
due to the complexity of the structure of fixed wing aircraft. However, it
will be noted, that the Flex Wing weight is heavier than a simple para-
chute system. This additional weight is necessary to attain maneuver-
ability. The fact that the Flex Wing parameter falls between the para-
chute system and a small aircraft, indicates that the weight is reasonable.
5.10.2 Flight Controls Weight
Weight Parameters
The normal weight parameters used for preliminary weight
estimation of aircraft are not directly applicable to the Flex Wing.
However, the following items should be noted.
15.2%
15 ~ - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - ~
f-4
::r:
o
-
12.0%
~ 10 ~ - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - ~
~
?A
g
o
~
o
f-4
~
()
p::
~
~
5 r - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - ~
1.6%
ul
t:Q
....:l
o
In
3.4%
o ~ ________ ~ ~ M ~ ________ ~ ~ ~ ______ ~ ~ ~ ~ ______ ~ ~ ~ ~
SYSTEM
GROSS WT
LBS
PARACHUTE FLEX-WING
9,300 9,500
SMALL
AIRCRAFT
4,000
Figure 5.46 Wing Weight as Percent of Gross Weight
MEDIUM
AIRCRAFT
25,000
5-99
5-100
Fixed Equipment Weights
Parameters by "Cranfield"
Flight Controls Parameter
(a) Wt. = 35 + 0.008 G. W. (G. W. = gross wt. )
Thus Apollo Parametric Wt. = 35 + O. 008 x 9500
= 111lbs.
Hydraulic Wt. Parameter
(b) Wt. = 2 to 4 percent of gross
Apollo Parametric = 2 percent x 9,500 lb = 1901bs.
The summation of (a) and (b) = 111 + 190 = 3011bs.
The calculated Apollo weight of these items = 323 lbs.
This indicates that the combination of Hydraulics and Con-
trols System weight allowance is consistent with present aircraft
practice.
In addition, Figure 5.47 shows the relation of the Apollo
Flex-Wing Hydraulics and Electrical equipment weight to another type
of parametric study. It will be noted that the Flex Wing is somewhat
lighter than an aircraft of this gross weight. This can be attributed to
the fact that the Flex Wing has very few electrical components.
In a continuing effort to check the validity of the surface
controls and hydraulics group, the weight as a percentage of gross
weight for actual fighter aircraft was analyzed. The results are shown
in Figure 5.48. This graph indicates that, although slightly above the
mean, the flex wing controls weight is by no means excessive.
5.10.3 Single vs. 2-Stage System Weight
A study was made of a deployment scheme which would use
the Flex Wing as a parachute until the initial deceleration had been
accomplished. This system requires a large increase in wing membrane
thickness and an increase in cable weights.
5
4
0
0
u.5
a:l
H
3
::c:
0
1-1
r:iI
2
Z
r:iI
:;E
1-1
Ll':l
0
r:iI
1 i!l
(.0
ZI
o E tECTo AND HYDRAULIC W T = WOo 7925
4.08
.V APOLLO
/
V
4 8 12 16
DESIGN GROSS WT. x 10
3
Figure 5.47 Equipment Weight vs Design Gross Weight
5-101
PERCENT OF GROSS WEIGHT
Figure 5.48 Surface Controls Group as Percent of Gross Weight
5-102
A comparison is shown below:
Membrane
Wing (4 oz/yd)
Parachute (6 oz/yd)
Overlap = 5 percent
Glue
Total Membrane
Cables Keel
L.E. 's
2-Stage System
(Normal Wing Conf.)
Lbs.
55.4
2.8
5.0
63.2
27.0
26.6
116.8
Weight Penalty = 184.4 - 116.8
Single Stage System
(Parachute Conf.)
Lbs.
83.3
5.8
5.0
94.1
26.1
64.2
184.4
67.6
5.10.4 Comparison of Detail Weight Study and Parametric Weight
Analysis
The curves shown in Figures 5.49 through 5.51 are the
original parametric weight curves used for preliminary estimates on
the Apollo landing system weights.
The final configuration at:
n = 7
z
(Load factor)
W = 9500 lbs (gross weight)
gives n W = 66,500
z
5-103
-
.
00
I=Q
-
E-4
::t::
C!)
I-f
5-104
240
200
160
120
80
A = WING AREA
VERTICAL LOAD FACTOR = 20,000 LBS.
W = GROSS WEIGHT
A=3673.6
A = 2066.4
A = 918.4
40
o
2 4 6 8
NUMBER OF SUSPENSION LINES PER MEMBER
Figure 5.49 Structural Wing Weight
-
.
00
a:l
...:l
.........
::c:
0
......
LQ
0
T""'i
r:Q
T""'i
ZI
N:i3= VERTICAL LOAD FACTOR = 50,000 LBS.
W = GROSS WEIGHT 2
A = WING AREA (FT. )
600
A= 3673.6
500
A = 2066.4
400
300
A = 918.4
200
100
2
4 6 8
NUMBER OF SUSPENSION LINES PER, MEMBER
Figure 5.50 Structural Wing Weight
5-105
-
rJl
..::I
-
E-4
0
1-4
5-106
800
A = 3673.6
VERTICAL LOAD FACTOR = 70,000 LBS.
GROSS WEIGHT
WING AREA (FT2)
A = 2066.4
500
400
A - 918.4
200
2 4 6
8
NUMBER OF SUSPENSION LINES PER MEMBER
Figure 5051 Structural Wing Weight
This approximates the n W = 70,000 curve. Interpolating
between the Area = 2066 ft2 line a n ~ the Area = 918 ft2 line for our
design area 2000 ft2 with seven (7) cables, gives:
W = 355lbs
The actual design W = 305 lbs
Difference = -50lbs
This reduction in weight may be attributed to two important
weight saving systems introduced later in the program.
Item (1) The high pressure (7000 psi) bottles of nitrogen
(which were originally intended for wing inflation)
were replaced with a gas generator system. This
concept, which is now being successfully used to
inflate landing bags, resulted in a 35 lb weight
reduction and reduced the number of components
which normally increases the reliability of a
system.
Item (2) The dacron keel and leading edges had been de-
signed with a heavy (14 oz/yd
2
) gage material. The
weight of this material is:
2
Dacron 7oz/yd
2
Coating 7 oz/yd
Total
2
14oz/yd
The material must be coated to make it impermeable. The
coating normally is equal in weight to the fabric. It was apparent that
the use of a single layer of cloth (with high weight of coating) offered
an important opportunity to save weight. Therefore the design was
changed to a combination of a coated inner layer (to contain gas) and an
uncoated outer layer.
Since the strength of the cloth is in the dacron and not the
coating, a cloth of equivalent strength was obtained with a 25 percent
reduction in weight.
5-107
5-108
5.10.5 Weight Summary
The weights quoted on the Apollo Program have been
developed using four different sources: semi analytical data, calcula-
tions of layout drawings, statistical comparative analyses, and vendor
quoted weights.
All weight calculations were made after the layout drawings
had progressed to near final stage so that a reasonable stress analysis
could be made.
Summary of Total Weight
Wing Group 324
Wing 165
Inflation System 60
Cables System 80
Deployment System 19
Body Group 208
Forward Section 89
Aft Section 119
Surface Controls Group 301
Controls 166
Hyd. Oil 27
Actuators/Motors 108
Instrumentation Group 15
TOTAL Weight =
848 lbs.
The moment of inertia study was derived from the incre-
mental moments of inertia supplied by the Command Module manu-
facturer and the increments calculated for the Ryan components.
C. G. of Ryan Wing
Stowed in Capsule
Vert. Dist.
From Base of
Wt. Capsule
Wing Group 305 90 27,450
Deployment 19 110 2,090
Body Group 208 75 15,600
Surface Controls 301 100 30,100
Instrumentation 15 105 1,575
Total 848 90.6 76,815
The c. g. of the Ryan components is 90.6 inches above the
base of the capsule. Our drawings show the base at capsule station
1009.82. Therefore the Ryan c. g. = 1009.82 - 90.6 = 919.22 in.
capsule coordinates.
5-109
MOMENT OF INERTIA DATA
System Inertia (About c. g.)
Roll I = 19,566 Slug - Ft.
2
x
2
Pitch I
= 25,194 Slug - ft.
Y
10,240 Slug - ft.
2
Yaw I =
z
*19 lbs. deployment weight does not fly
5-110
AN-910,3-D
SUPERSEDING
AN-910,3-C
NAME R. T. Blake
DATE Sept. 22,1961
PAGE 1
MODEL Flex Wing
REPOR T APOLLO
GROUP WEIGHT STATEMENT
ESTIMATED - CALCULATED - ACTUAL
(Cross out those not applicable)
CONTRACTNO. ____ ~ ______________________________________ __
AIRPLANE, GOVERNMENT NO. __________________________ _
AIRPLANE, CO.-TRACTOR NO. __________________________ _
MANUFACTURED BY ________ ----=R'-!!Y::..:.AN=-=AER=O=N=A=UTI=C=ZL='--C""-'O=MP""'-"-'ANY==-_______ _
MAIN AUXILIARY
MANUFACTURED BY
1&1
z
is
MODEL
z
1&1
NO.
l1li:
MANUFACTURED BY
1&1
-I
-I
1&1
DESIGN NO.
L
0
l1li:
NO. L
1
AN-9103-D
NAME ________________ __
DATE
GROUP WEIGHT STATEMENT
WE.IGHT EMPTY
1 WING GROUP
2
CENTER SECTION. BASIC STRUCTURE
3 INTERMEDIATE PANEL. BASIC STRUCTURE
4
OUTER PANEL. BASIC STRUCTURE (INCL. TIPS LBS.)
5
6 SECONDARY STRUCTURE WINGFOLD MECHANISM LBS.)
7 AILERONS (INCL. BALANCE WEIGHT LBS.)
8 FLAPS. TRAILING EDGE
9
LEADING EDGE
10 IIOCfS INFLATION SYSTEM
11 CABLES SYSTEM
12 DEPLOYMENT GEAR
13
14
15 TAIL GROUP
16 STABILIZER. BASIC STRUCTURE
17 FINS. BASIC STRUCTURE (INCL. DORSAL LBS.)
18 SECONDARY STRUCTURE (STAB. & FINS)
19 ELEVATOR (INCL. BALANCE WEIGHT LBS.)
20 RUDDERS (INCL. BALANCE WEIGHT LIS.)
21
22
23 BODY GROUP
24 FUSELAGE OR HULL. BASIC
25
26 SECONDARY STRUCTURE. FUSELAGE OR HULL
27 B09MS
28 SPEEDBRAKES
29 DOORS, PANELS & MISC.
30
31 ALIGHTING GEAR GROUP LAND (TYPE: )
32
LOCATION
WHEELS, BRAKES
33
STRUCTURE CONTROLS
TIRES TUBES AIR
34
35
36
37
38
-
39
40
ALIGHTING GEAR GROUP. WATER
41 LOCATION fLOAn STRUTS CONTROLS
42
43
'" 45
46
SURFACE CONTROLS GROUP
47
COCKPIT CONTROLS
.ca
AUTOMATIC PILOT
49
SYSTEM CONTROLS (INCL. POWER & FEEL CONTROLS LBS.)
50
51 ENGINE SECTIOM OR NACELLE GROUP
52
INBOARD
53
CENTER
54 OUTBOARD
55 DOORS, PANELS & MISC.
56
57 TOTAL. (TO BE BROUGHT FORWARD)
2
PAGE 2
MODEL FJex Wing
REPOR T APOU 0
-' I
324
165
nu
19
208
301
t533
AN-9103-D
NAME ________ _
DATE ______________ _
GROUP WEIGHT STATEMENT
WEIGHT ~ M P T Y
1 PROPULSION GROUP
2 AUXILIARY
3 ENGINE INSTALLATION
4 AFTERBURNERS (IF FURN. SEPARATELY)
5 ACCESSORY GEAR BOXES & DRIVES
6 SUPERCHARGERS (FOR TURBO TYPES)
7 AIR INDUCTION SYSTEM
8 EXHAUST SYSTEM
9 COOLING SYSTEM
10 LUBRICATING SYSTEM
11 TANKS
12 COOLING INSTALLATION
13 DUCTS, PLUMBING, ETC.
14 FUEL SYSTEM
15 TANKS - PROTECTED
16 - UNPROTECTED
17 PLUMBING, ETC.
18 WATER INJECTION SYSTEM
19 ENGINE CONTROLS
20 STARTING SYSTEM
21 PROPELLER INSTALLATION
22
23
24 AUXILIARY POWER PLANT GROUP
25 INSTRUMENTS & NAVIGATIONAL EQUIPMENT GROUP
26 HYDRAULIC & PNEUMA TIC GROUP
27
28
29 ELECTRICAL GROUP
30
31
32 ELECTRONICS GROUP
33 EQUIPMENT
34 INSTALLATION
35
36 ARMAMENT GROUP (INCL. GUNFIRE PROTECTION LBS.)
37 FURNISHINGS & EQUIPMENT GROUP
38 ACCOMMODATIONS FOR PERSONNEL
39 MISCELLANEOUS EQUIPMENT
40 FURNISHINGS
41 EMERGENCY EQUIPMENT
42
43 AIR CONDITIONING & ANTI-ICING EQUIPMENT GROUP
'"
AIR CONDITIONING
45 ANTI.ICING
46
47 PHOTOGRAPHIC GROUP
48 AUXILIARY GEAR GROUP
49 HANDLING GEAR
50 ARRESTING GEAR
51 CAT APUL TING GEAR
52 ATO GEAR
53
54
55 MANUFACTURING VARIATION
56 TOTAL FROM PG. 2
57 WEIGHT EMPTY
3
PAGE :3
MODEL Flex Wing
REPORT APOLLO
MAIM
15
.
8'5'5
.848
AN-9103-D
NAME __________________ _
DATE
1 LOAD CONDITION
2
3 CREW (NO. )
4 PASSENGERS (NO. )
5 FUEL
6 UNUSABLE
7 INTERNAL
8
9
10 EXTERNAL
11
12 BOMB BAY
13
14 OIL
15 TRAPPED
16 ENGINE
17
18 FUEL TANKS (LOCATION
Type
GROUP WEIGHT STATEMENT
USEFUL LOAD & GROSS WEIGHT
Gal
)
19 WATER INJECTION FLUID ( GALS)
20
21 8AGGAGE
22 CARGO
23
24 ARMAMENT
25 GUNS (Location)
Fix. 0. Flex. Qty. Cal.
26
27
28
29
30
31
32 AMMUNITION
33
34
35
36
37
38
39 INSTALLATIONS (BOMB T O R P E D O ~ ROCKET ETC.)
*40 BOMB OR TORPEDO RACKS
41
42
43
'"
45
46 EQUIPMENT
47 PYROTECHNICS
48 PHOTOGRAPHIC
49
*50 OXYGEN
51
52 MISCELLANEOUS
53
54
55 USEFUL LOAD
56 WEIGHT EMPTY
57 GROSS WEIGHT
*1 Dot specified as weight empty.
PAGE 4
MODEL Flex Wing
REPORT APOLLO
8700
848
9.548
AN
NAM R.T.Blake
DA TE Sept. 22,1961
DETAIL WE IGHT
ESTIM ATED CALCUL.ATE
-CROSS OUT THO SE NOT
CONTRACT
AIRPLANE-GOVERNM ENT NUM9 ER
A I RPLANE-CON-TRA( TOR NUM8 ER
MANUFACTURED BY RYAN A !:RONAUTICJ
ENGINE
MANUFACTURED BY
MODEL
NUMBER
PROPELLER
MANUFACTURED BY
MODEL.
NUMBER
PAGE 5
MODEL
R EPOR T APOLLO
TEMENT
o -
PPlICABL E-
.L COMPANY
MJI lIN
AUX LIAKY
IN AUXJ IL IARY
1
2
3
AN 9102-0-TAB
NAME
DATE
4UPPER-FRONT SPAR CAP
5 -INTERMEDIATE SPAR CAP
6 -REAR SPAR CAP
7 -AUXILIARY SPAR CAP
e -INTERSPAR COVER
9 -SPANWISE STIFFENERS
10 -JOINTS. SPLICES' nST,
11
12
13
14 ... OWER-FRONT SPAR CAP
15 -INTERMEDIATE Sl'AR CU
16 -REAR SPAR CAP
17 -AUXILIARY SPAR CAP
18 -INTERSPAR COVER
19 -SPANwrSE STIFFENERS
20 -JOINTS. SPLICES' FAST.
21
22 llI.lIQ:: Mli:MH'R 1ll'i!1i!
23
24 WEB &. STIFF.-FRONT
-INTERMEDIATE
26 -REAR
127 -AUXILIARY
Ize
-JO I NTS. SPL I CB- l"AST
2')
"30
"31 INTERSPAR-RIBS
32
3'3 -CHORDWISE STIffENER:>
-JOINTS. SPLICES &0 ,.AS,.
35
'3e, ",I:ADING
R.K .
,31
.,;;:
Fabric
,., ('l
-KIHS
1'3 "!I -AUXILIARY SPARS
1
4
0
-JU HerS. sl"L I CI:S &0 ,. AS,
,41
LEADING EDGE L.K.
KEEL
, ....
FABRIC
-RleS
-AUXILIART SPARS
-JOINTS.
1'0
TIPS
1'1
'2
FIREWALL-STRUCTURAL
, ..
5'
TOTALS-
,e,
TOTAL-BASIC STRUCTURE
'7
WING GROUP
BASIC STRUCTURE
2
29.7
2.0
30.1
CYNTER
SECTION
,1.7
,1.7
,5.6
105.0
PAGE 6
MODEL Flex Wing
It EPOft T APOLLO
INTERM
PANEL
lob,.U
AN 9102-D-TAB
NAME
DATE
WING GROU'
SECONDARY STRUCTURE
DOORS. PANELS AND MISCELLANEOUS
PAGE 7
NODEl Flex Wing
REPORT APOLLO
1
** *
Ix XX OPERATING MECHANtSM
,
LO P AREA STRUCT MECH &-
.. -
LOCK
FT ICONTROlS MECH
..
!SWING FOLD INFLATION 60
6 MECH. 53
1 TUBES 4
JlDOORS &- FRAMES SUPPTS 3
C]
-LANDING
11(1
11 -BOMA
l'
14 -GUN
16 -AMMUNITION
17
18 -ROCKET
19
20 -LIFE RAFT
21
"
-ESCAPE
23
24 -ACCESS
25
26
27
28 iPANELS-NON STRUCTURAL
CABLES 00
30
!:l'7_
31
T 'CO
32
_._.
,.,c .... . ....... ... ......
----- .-....
35
37
38
DEPLOYMENT 19
40
n..._ tn. ,,...
-
41 .. -;:;
0
"2
"
143
14"
1
4
'
146
47
4a
W",LKWAVS. STEPS tr GRIPS
1'0
151 "AIRING AND FILLETS
FINISH
I"
COLUMN TOTALS 11)q 11)Q.0
156 STRUCTURE
PIl2 .. 16'5 .. 0
WING lHlUlI.t" ,Q
..
TYPE OF POWER- H-HVD. E-ELEC. P-PNEU. POWER FROM
DISTRIBUTION POINT TO ACTUATING UNIT
** INDICATE LOCATION OF MAJOR DOORS- CSt OPt IP. ETC
,
1
,
3
4
IJ
6
.,
II!
..
HI
11
It'
It '3
It4
M
11
18
20
21
22
23
24
25
26
27
28
2CJ
3C
31
32
33
3"
35
36
37
38
39
40
41
42
AN .102-D-TA8
NAM!
DATE
& FRAMES
H(IW'/,
!4T,
_ .. .4l?M
I"!.4MTlT.'R!
r---
MINOR FRAMES
STAT
JOINTS. SPLICES. FASTENER5
OVERTURN STRUCTURE
COVER-UPPER BETWEEN LONGN
-SIDE BETWEEN LONGERONS
-LOWER_ BETWEEN
COVER LONGL STIFF.-UPPER
-SIDE
-LOWER
LONGERONS-UPPER
LONGERONS-LOWER
LONGITUDINAL PARTITIONS
43 FLOORING AND SUPPORTS
4"
.,
46
.'7 IFIREWALL-STRUCTURAL
413
4CJ
5Cl kEEL
51
52 CHINE ANO SPRAY STRIPS
53 STEP ASSEMBLY
5"
STAIRWAYS-STRUCTURAL
5'
TOTALS
56 STRUCTURE
5'7
X
BODV GROUP
BASIC STRUCTURE
FUSELAGE OR HULL
'AGE 8
MODELrex Wing
R EPOR APOLLO
XX 8()9"'S
41i"J'1 1i'Wn
28 14
40 "i"i
"i1 7;1
11
"
1'0
Bg
20B
* LIST ALL MAIN & WATERTIGHT BULKHEADS & FRAMES INDIVIDU4LLY. MINOR
MAY BE COMBINED.
9
,
.,
"
AN 9102-D-TAB
NAME
f}ATF:
... rnLUMN OR STICK
"
_" Tl nT
,.
PfLOT
7 -CONNECTING
R
_ T .c,
CJ
lin
11
l'
13
RUDDER PEDALS & BRK TREAD
14 -PILOT
tl-
__ PILOT
MFMBER'<;'
119
120
12J
iNTEGRAL PARKING LOCK
124 CONTROL STICK
25 PEDALS
26 SURFACES
27
28
29
30
31
32
:33 AUTOPIlOT-TYPE-
34 CONTROLLER
311 TRANSMITTER
36 SERVO AMPLIFIER
3; SERVO MOTORS
3e GYROS
:3 Ii
4(;
41
42
43
44
45
46 SUPPORTS AND BRACKETS
47
48* PLUMBING
49* FLUID
ElEC PANELS & CIRCUITRY
51 PUllEYS. SPROCKETS. ETC
52
53
54
55 COLUMN TOTALS
SURFACE CONTROLS GROUP
COCKPIT AND AUTOPILOT
56 TOTAL-COCKPIT CONTROLS & AUTOPILOT
57
* FROM MAIN DISTRIBUTION POINT TO ACTUATING uNIT.
15
PAGE 9
MODEL Flex Wing
REPORT APOLLO
COCKPIT AUTO-
CONTROL
PI,",OT
70
7.0
7.0
1
2
3
4
AN 9102-D-TA8
NAME
DATE
OPERATING Mf:CH
6 CONTROLS
7
8 ACTUATORS
9 TRIM CONTROLS
10 'PTTT.T.W!=l
111
ELECTRICAL OPERATING MECH
12 **TYPE
13 CONTROLS
114 * CIRCUITRY
OPERATING MOTORS "PTlMP
--_. __ .
116 MECHANISM
117 TRIM CONTROLS
18
19 HYDRAULIC OPERATING MECH
20 **TYPE
21 CONTROLS
21
! PLUMBING
23 PUMPS (.,,,,,,, i+""m ''''\
24 RESERVOIRS
25 ACCUMULATORS
26 ACTUATORS
Motor' \
27
28 TRIM CONTROLS
29 * FLU ID'1'QTAT '" Ii O'A 1
30
31 PNEUMATIC OPERATING MECH
32 **TYPE
33 CONTROLS
34 * PLUMBING
35 PUMPS
36 BOTTLES-AIR
37 ACTUATORS
38 Ar! r.TlMTTT . A'T'()'R
39 TRIM -CONTROLS
40
41 ARTIFTCIAL FEEL
42 8UNGEE
B08 WEIGHT
44
45
46
47
48 SUPPORTS. GUIDES. ETC-WIN(
4C) -TAIL
50 -80DY
51 -NACELLE
52
53
54
i55 COLUMN TOTALS
56 PAGE TOTAL
SURFACE CONTROLS GROUP
SYSTEM CONTROLS
CONTD
AlI"r "FWD
wmn
'RnT:r. 'Rot.L
'i .1 4.4
? h ? h
17 ?
1 h?
1R 1.
I
2()()
17 ()
"11.0 26.0
4.0
Pi.O
"''''.()
'i.0
, '" 1
1 .8 l.a
1 ",P,
h.n '"
;r;h Ii
57 TOTAL-SURFACE CONTROLS GROUP - PG 15-17 7 20;r; 0
* FROM MAIN DISTRIBUTION POINT TO ACTUATING UNIT.
** TYPE- ADD P-POWERED OR B-800ST.
17
'.GE 10
MODEL Flex Wing
R EPOR T APOLLO
STAB.
Ag..l
PITC!H
()TT.
4.8
h,6
, 8.()
27. :s
In .0
10
"'24 27.':3
20")0
1
AN 9102-0-TAB
NAME
DATE
INSTRUMENT AND NAVIGATIONAL
EQUIPMENT GROUP
INSTRUMENTS
PAGE 11
MODEL Flex Wing
REPORT APOLLO
INSTRM
2FUNCTJONAL GROUPS TRANSM POWER
!
4
5
6
7
8
'l
110
111
112
111t
111
Ie
20
21
22
23
24
25
26
27
_28
24)
3C
31
32
33
3 ..
31
36
3;
3E
4C
41
42
411
45
46
41
4!
4']
50
51
52
53
54
!5'
56
5J
ANO ITEMS
QT'1 INDI-c , AMPL INSTL. SYSTEM
P'RF.SStTRF.
"i
r- .
ELli:c' 'f./
!llT. lJ.
KII;II;W ("!l 11;1'(.'-; ANn 6
TOTALS 1">
1"5.0
LIST ITEMS BY FUNCTIONAL GROUPS- FLIGHT, ENGINE" MIsC. LIST SUB-GROUPS
BY CREW STATION. AOD SUPPLEMENTAL PAGE 26A IF NECESSARY.
26
SECTION 5.11
CHECK-OUT PROCEDURES
TABLE OF CONTENTS
Section Page
5.11. 1 Hydraulic System 5-112
5.11. 2 Electrical System 5-112
5.11. 3 Wing Pressurization System 5-112
5.11. 4 Post Flight Check Out 5-112
5-111
SECTION 5.11
CHECK-OUT PROCEDURES
A preflight checkout is required to assure proper wing deploy-
ment and performance. Following is a general outline of the checkout
requirements and procedures.
5. 11. 1 Hydraulic System - A ground checkout of all hydraulic
equipment will be required such as visual inspection of all lines, pumps,
cylinders, motors, during operation, for leaks, possible future leaks,
etc. This is accomplished with the wing in the stored position by releas-
ing the control arms and operating them through their travel. A standard
hydraulic console furnishes the ground power for cycling the control
mechanism and testing all system components.
5.11. 2 Electrical System - The electrical system check consists of
a time check of the time delay relays to assure proper sequencing of the
wing deployment system. During this check, testing of all pyrotechnic
circuitry (explosive bolts reefing cutters, etc) is performed by using a
voltmeter and checking the time when current is applied, and amount of
current supplied. Up to and including this phase, all pyrotechnics will
be disconnected and not armed until after final checkout, to assure elim-
ination of a possible premature firing. Oscillographs will be used during
checkout of pyrotechnics to accurately record time between firings. In
addition to squib checks, all switches, solenoid valves, relays, etc. will
be checked.
5. 11. 3 Wing Pressurization System - Checking this system consists
of pressurizing the lines downstream of the gas generator at the pressure
regulator and observing all joints and connections for leakage. All valves
will also be cycled to check for operation and leakage. These checks will
occur prior to final packing of the wing. The wing will be checked at this
time for leaks. After packing, the voltage to the gas generator detonator
(starter) will be checked to assure that the gas generator will function.
5. 11. 4 Post Flight Checkout - This checkout will consist of disarm-
ing any unfired squibs in standby deployment systems and bleeding off
hydraulic pressure in the control system. For ease in handling, the wing
and capsule will be separated by removing approximately 8 bolts connect-
ing the wing riser fittings to the control arm.
5-112
5-113
SECTION 5.12
RECOVERY SYSTEM RELIABILITY
The primary purpose of the Apollo recovery system is to
return a team of men safely to a predetermined or pilot-selected landing
area after a scheduled re-entry into the earth's atmosphere. An abort is
also of primary concern, and is given due consideration in the design of
this system. Two types of aborts may occur prior to the vehicle attain-
ing an orbit. The first is the on-pad abort, and the second is the off-pad
abort. The former occurs prior to lift off with the latter happening after
lift off and prior to the attainment of orbit.
The reliability of the recovery system is predicated on two
factors. The first of these is the completely automatic system with its
fail safe, redundant and/or duplicated subsystems. The reliability of
the system is further enhanced by the introduction of human decision
capability. This constitutes the second factor.
Within certain limits, the recovery system may be initiated
automatically or manually. These limits are the altitude and velocity
restrictions. The velocity restriction stipulates that the recovery se-
quence may not be initiated while the capsule is traveling in excess of
Mach 1. O. The mode of initiation (i. e. automatic or manual) and the
type of recovery (i. e. abort or re-entry) set the altitude limits. These
limits are described in detail in another section of this report. For
automatic initiation of either type of recovery, the altitude limit is equal
to, or less than, 40, 000 feet. Manual initiation may occur at any point
below 80, 000 feet.
The block diagrams, Figures 5.44 and 5.45 of this report,
help to point out how the reliability of this system is increased beyond
the value assigned to many of the subsystem components. If each
event (E) is assigned a numerical value of reliability, the total recovery
system reliability is equal to the product of these events. This is expres-
sed as follows: RT = REI x RE2 x REa x .. etc., where RT is the total
recovery system reliability and REi (i = 1, 2, a ... ) is the reliability of
each event. It can be seen in the block diagram that many of the events
are designed to include one or more items that serve as a backup to insure
that this event will occur. The reliability of this event is thus increased
by a substantial amount. For example, if an event has two items (the
primary item and its back-up) of equal numerical reliability (say 0.90),
the reliability of the event is O. 99. This is calculated by subtracting the
product of the failure rates of the two items from unity. Where dupli-
cation or redundance do not occur, the components of that event were
designed with as many fail safe features as possible. A fail safe feature
has a reliability that approaches unity.
Table 5.2 and alternate Table 5.3, give the major sequence of
events that occur during the normal recovery of the capsule and the fail
safe, duplicated or redundant features that enhance the reliability of the
systems. Two possible methods of deployment are described in this
report. Method one, Table 5.2, deploys the reefed wing which is imme-
diately pressurized to the wing configuration. Method two, Table 5. 3,
deploys the wing reefed as a parachute and pressurization to the wing
configuration follows.
The reliability of any system is enhanced with the introduction
of the human backup capability. The measure of this increase is a function
of the skill of the operator and the information that is available to him.
Operator or pilot skill is unquestioned for this mission, and the instru-
mentation display is such as to afford him ample inputs.
5-114
01
I
f-'
f-'
01
RYAN
__ mm_ 61BI05
EVENT
Initiation
Automatic
Manual
Deployment
Remove
container cover
Deploy pilot
chute
Deploy reefed
drag chute
TABLE 5.2
RECOVERY SYSTEM SEQUENCE OF EVENTS USING METHOD ONE
FEATURE
Radar altimeter
Crew member
REMARKS
Senses a change in sign of h for the abort missions. Senses the
reference altitude for the re-entry mission. Doppler radar
accuracy is well-known and highly reliable.
Has manual override in the event of failure of the automatic
system, or may initiate recovery above the reference altitude
if increased range is required.
Pyrotechnics Explosive bolts are widely used and generally considered to be
highly reliable. The action will be redundant.
Spring or air stream Extensively used in braking and recovery operation. Proved
packing techniques considered fail-safe.
Attached to pilot chute I Pilot chute is mechanically attached to the drag chute and is of
sufficient size to cause drag chute deployment. Drag chute is
reefed to minimize the initial shock imposed on the attachment
cables. Proved packing techniques considered fail safe.
"
01
I
f-'
f-'
Ol
RYAN
__ wm_ 61BI05
EVENT
Deployment (cont'd)
Deploy reefed
wing
Pressurization
Pressurize in-
flatable wing
members
FEATURE
Attached to drag
chute
Gas generators
Gas manifolds &
ducts
TABLE 5.2 (Cont'd)
REMARKS
Drag chute is mechanically attached to the deployed center of the
wing, and is of sufficient size to cause wing deployment. Wing is
reefed in two ways to eliminate entanglement. Energy absorption
is described in the text of Section 4. 1. Packing techniques are
derived from experience gained on Mercury program.
Small, light weight, low internal pressure, and highly reliable.
Two generators will be used, each having a parallel electrical
starter for the ignition. The unit is self-contained, with the
exception of the mode of starting and is calibrated by the manu-
facturer. A manual override is incorporated to further increase
the reliability of the starter. A variety of gases may be used
that will not react with the fabric of the members.
The gas from the generators flow through their individual mani-
folds and ducts. Three ducts per manifold are used to distribute
the gas to the check valves inside the inflatable members. See
Section 5.2.2 for construction details.
01
I
I-'
I-'
-1
RYAN
__ m_ 61BI05
EVENT
Pressurization (cont'd)
Disreef drag
chute
First step to
dereef wing
FEATURE
Inflatable wing
members
Comment on duality
Pyrotechnics
Drag reel
TABLE 5.2 (Cont'd)
REMARKS
Wing construction is such as to provide two inflatable sections
to each leading edge and keel. A rupture of one section permits
the other section to expand and displace the void thus created.
The dual generators, manifolds, ducts, check valves, and in-
flatable sections of the members increases the reliability of
the pressurization system to the level of fail-safe. All of the
components have a proven reliability that is increased when
used in parallel.
Only partial pressurization is attained when this event occurs.
Explosives are used for the reason stated previously. The dis-
reefed chute is used to further reduce the speed of the capsule
to minimize to the shock loads on the cables when the wing is
dis reefed.
Pressurization of wing is now complete. Apex and trailing edge
of wing are paid out using a drag reel that is similar to the one
used in Ryan's Mercury program. A high degree of success was
realized in the tests of this device,
01
I
t-'
t-'
OJ
RVAN
__ mID. 61BI05
EVENT
Pressurization (cont'd)
Second step to
dereef wing
Flight Control
Wing assumes
gliding attitude
Manual control
of flight
FEATURE
Pyrotechnics and
mechanical fas-
teners
Suspension or
control cables and
control arms
Pilot
Primary power
supply
TABLE 5.2 (Cont'd)
REMARKS
Explosives are used to separate the cable that attaches the drag
chute to the control arms. The loops that reef the wing members
together are pinned to the cable to permit easy release when the
drag chute and cable pull away. Tests of the mechanical fasten-
ers during the Mercury program have prompted their use in this
program.
Suspension or control cables are of predetermined length to per-
mit the wing to assume a gliding attitude so long as the control
arms remain locked in place. This flight attitude also corre-
sponds to the attitude used for near minimum sink rate.
Under normal circumstances the pilot will assume control of
flight. Human element increases the probability of a safe
descent and landing.
Pressure is maintained with an electrically driven hydraulic pump
that is connected to the capsule's electrical power supply. Pump
and motor are standard items and highly reliable.
<:1J
I
....
....
w
RVAN
__ WI. 61BI05
EVENT
Flight Control (cont'd)
Landing
Manual
Automatic
FEATURE
Auxiliary and flare
power supply
Auxiliary power
supply
Automatic landing
system
TABLE 5.2 (Cont'd)
REMARKS
Pressure is from a high energy gas bottle that drives hydraulic
fluid from a pre-charged storage container. This part of the
system provides minimum flight control and full flare control.
All components are standard items, and are considered highly
reliable.
Described above.
The automatic landing system is used in the event that manual
control is not assumed. This device is coupled with the radar
altimeter to sense the correct attitude that the maneuver
should start. No precedence has been established for this device.
OJ
I
f-'
tv
o
RYAN
__ rIM. 61BI05
TABLE 5.3
RECOVERY SYSTEM SEQUENCE OF EVENTS USING METHOD TWO
EVENT FEATURE
Initiation Same as Table 5.2
Deployment
Remove container I Same as Table 5.2
cover
Deploy pilot chute I Same as Table 5.2
Deploy wing reefed I Attached to pilot
as a parachute
First step in
disreefment of
parachute con-
figuration
Pres surization
chute
Pyrotechnics
Pressurization of I Gas generators
wing members
REMARKS
Pilot chute is mechanically attached to the parachute configura-
tion of the wing. Proven parachute packing procedures will be
used to insure deployment.
Explosive bolts are widely used and generally considered to be
highly reliable. This step is used to decrease the velocity of
the capsule to reduced shock loads when second step of dis-
reefment is initiated.
Same as Table 5. 2
OJ
I
~
t>:l
~
RVAN
__ lm_ 61B105
EVENT
Pressurization (cont'd)
Second step of
disreefment of
parachute
configuration
Flight Control
Landing
FEATURE
Pyrotechnics
Same as Table 5. 2
Same as Table 5.2
TABLE 5.3 (Cont'd)
REMARKS
Explosive bolts, as previously stated. This step permits the
wing, while being pressurized, to extend to the wing configura-
tion.
SECTION 6.0
CONCLUSIONS
Results of the analyses shown in this report and in the tests
that were conducted, indicate the compatibility of the Flexible-Wing -
Apollo Command Module landing system. It has been shown that a wing
of sufficient size may be fabricated, packed, and deployed from the space
provided within the vehicle. The ability of the wing to provide a maneu-
verable vehicle, easily flown and landed by a pilot, has also been indi-
cated.
6-1
SECTION 7.0
APPENDIX
TABLE OF CONTENTS
Section Page
7.1 List of References 7-2
7.2 List of Symbols 7-3
7.3 Estimated Wing Aerodynamic Characteristics 7-8
7.4 Glide Performance Analysis 7-57
7.5 Landing Flare Analysis Procedures 7-62
7.6 Wing Parametric Structural Analysis 7-73
7-1
SECTION 7.0
APPENDIX
7.1 LIST OF REFERENCES
1. Bates, W.: "Static Stability of Fuselages Having a Relatively
Flat Cross Section." N. A. C. A. TN-3429, March 1955.
2. Hoerner, S. F.: "Fluid Dynamic Drag." Published by the
Author, 1958.
3. Pearson, A.: "Wind Tunnel Investigation at Mach Numbers
From 0.5 to 1.14 of the Static Aerodynamic Characteristics
of a Model of a Project Mercury Capsule." N. A. S. A.
TM X-292, July 1960.
4. Ribner. H. S.: "The Stability Derivatives of Low Aspect-
Ratio Triangular Wings at Subsonic and Supersonic Speeds. "
N.A.C.A. TN 1423, September 1947.
7-2
7-3
A
A
b
C
L
C
m
c.g.
c.p.
C
C
x
c
c
D
D
e
SECTION 7.2
LIST OF SYMBOLS
2
Area, ft
Axial force, lbs.
Wing span, ft.
D
Drag coefficient,
qS
H
Hinge moment coefficient, qSC
L
Lift coefficient,
qS
M
Pitching moment coefficient,
qSC
A
Axial force coefficient,
qS
Normal force coefficient, :s
Resultant force
Resultant force coefficient,
qS
Center of gravity
Center of pressure
Section chord, ft.
Axial force
Axial force coefficient,
qS
Kee 1 length, ft.
Distance to outer fiber, ft.
Section lift coefficient
Drag force parallel to flight path CDqS, lbs.
Diameter, ft.
Error
F
I
K
k
f.
f.
f.
f.
c
m
M
M
N
N
N
o
n
n
P
LIST OF SYMBOLS, CONT'D
Force, lbs.
Allowable stress, lbs/in.
2
2
Working stress, lbs/in.
Hinge moment, ft. -lbs.
Altitude, feet
Height of wing membrane
Moment of inertia, inches
4
Gust alleviation factor
Opening shock factor
c. g. position aft of keel midpoint
Length of member or line, ft.
Distance, ft.
Distance to capsule c. g., ft.
Distance to line c. g., ft.
Distance to system c.g., ft.
Mass, slugs
Bending moment
Pitching moment, CmqSC
Hoop load per foot of width, lb/ft
2
Normal force, lbs.
Required strength per unit length, lb/in.
Number of suspension lines
Load factor
Load, lbs.
7-4
p
p
q
R
R
R
R
E.
1
R
R/D
S
S
T
t
t
U
V
V
W, WT
x
x
Y
Y
Y
att
y
7-5
LIST OF SYMBOLS, CONT'D
nW
Wing loading _z_, Ibs/ft.
2
. S
2
Pressure, lbs/ft.
Dynamic Pressure, ~ v
2
, Ibs/ft.
2
Gas constant, ft. -lbs. /lb. _0 R
Radius of wing membrane, ft.
Radius of inflatable tubes, ft.
Reliability of event i
Resultant force, lbs.
Rate of descent, ft. /sec.
2
Flatplan wing area or reference area, ft.
Range, nautical miles
Temperature, 0 R
Time
Thickness, inches
Gust velocity, ft/ sec
Free stream velocity, ft. /sec. or knots
3
Volume, ft.
Weight, lbs.
Longitudinal distance, ft.
Strength, lbs.
Lateral distance, ft.
Side force, lbs.
Lateral displacement of capsule attachment points for wing
leading-edge lines, measured from plane of symmetry
Distributed load, lb/ft.
~
0
...-f
a:l
...-f
~
ZI
-
~ I
y
y
z
Z
z
O!
'Y
11
e
A
I{!
1>
P
att
s
Po
(J
LIST OF SYMBOLS, CONTID
Strength per unit length, lbs . 1ft.
3
Volume per unit length, ft. 1ft.
Vertical or normal distance, ft.
Distance from keel to capsule attachment points for wing
leading-edge lines, measured perpendicular to keel, leading-
edge plane
Distance to system c. g., ft.
Angle of attack, degrees
Flight path angle from horizon, degrees
Non dimensional chordwise ~ ~ ) or spanwise ( ~ ) position
Angle between the wing resultant force and a normal to the
plane of the leading edge members
Longitudinal displacement of the leading-edge suspension
force from the leading-edge longitudinal resultant force
Leading edge sweep angle, degrees
Angle of yaw, degrees
Angle of bank, degrees
Mass density of air, slugs/ft.
3
3
Mass density of air at sea level standard conditions, slugs/ft.
Density ratio of air, -E-
Po
7-6
LIST OF SYMBOLS, CONT'D
SUBCRIPTS
A Aft long. Longitudinal
Att Attach m Material
ave Average m Membrane
c Compression max. Maximum
c Cable 0 Initial or nominal
cm Command Module req'd Required
C.P. Center of pressure s Suspension
cyl Cylinder S.B. Spreader bar
d Deployment T Total
e Equilibrium T Tank
f Filling T Tension
F Forward t Tensile
F.P. Flatplan t Tubes
g Gust V Vertical
H Horizontal W Wind
k Keel W Wing
i. Lines Z Vertical direction
lal Lateral 1 At opening shock
L.E. Leading edge
7-7
SECTION 7.3
ESTIMATED WING AERODYNAMIC CHARACTERISTICS
TABLE OF CONTENTS
Section Page
7.3.1 Wind Tunnel Data Corrections 7-10
7.3.2 Procedures Used in Estimating Effect of
Suspended Load 7-13
7.3.2.1 Procedures Used in Estimating Wing
Variable Sweep Characteristics in
Symmetrical Flight 7-15
7.3.2.2 Wing Leading Edge Suspension Hinge
Moment 7-16
7.3.3 Analysis of Wing Pressure Data 7-22
7.3.3.1 Wing Lateral Center of Pressure 7-22
7.3.3.2 Horizontal Apex Hinge Moments 7-25
7.3.4 Wing Aerodynamic Characteristics 7-29
7.3.4.1 Characteristics With Wing Folded 7-29
ID
7.3.4.2 Characteristics of The Open Wing 7-34
0
~
~
7.3.4.3 Longitudinal Dynamic Stability 7-38 ~
~
ZI
7.3.5 Procedure Used to Determine Feasibility of
~
Lateral Control 7-51
~ I
7.3.6 Procedure Used in Determination of Lateral
Control Effectiveness 7-56
7-8
7-9
SECTION 7.3
ESTIMA TED WING AERODYNAMIC CHARACTERISTICS
The wing longitudinal aerodynamic characteristics were
estimated for the open and reefed conditions.
The variable sweep longitudinal aerodynamic characteristics
with the wing open have been based on NASA unpublished wind tunnel
test data transmitted to Ryan by the Langley Research Center 7 by 10 ft.
Tunnels Branch. Both pressure and force test data have been used. The
force test tunnel program consisted of small scale tests of models with
rigid leading edge and keel members and with flexible membranes. The
tests were to determine the effects of wing sweep, flat plan sweep, wing
membrane to leading edge attachment geometry, and incidence between
the horizontal keel plane and the wing leading edge on longitudinal forces
and moment and leading edge in -plane and normal apex hinge moments.
All models tested to obtain apex hinge moments had spreader bars and
member diameter to keel length ratios of .015. Some additional data
was available for a Dlc of .07. The lateral-directional investigations
included tests to determine the effect of wing sweep, and incidence be-
tween the keel plane and the wing leading edge on the in-plane and normal
apex hinge moments as well as the sideforce and rolling and yawing
moment characteristics. The pressure models were constructed from
sections of cones to represent three wing sweeps derived for a flat plan
sweep of 45 degrees. The wings were entirely rigid and sufficiently
thick to contain the pressure lines. Wind tunnel tests conducted using
these models provided low speed wing pressure distributions as a func-
tion of angle of attack ..
The basic NASA force and pressure distribution data used to
derive the wing aerodynamic characteristics will not be reproduced here
except where it is used in substantiation of material or in discussion of
correction procedures.
The procedures used to estimate the effect of removing the
cross-member and of changing the leading edge size, and the methods
used to determine the variable sweep characteristics of the wing are
given in subsequent sections along with the data generated by using
these procedures. Data for the folded wing and the meth()ds used to
arrive at these characteristics are also given.
7.3.1 Wind Tunnel Data Corrections - Differences in the geom-
etries of the inflatable large scale wings considered here and the wing
tunnel models necessitated correction of the longitudinal characteristics
derived during the force test program for differences in size of the
leading edge and for removal of the spreader bar. Admittedly these
corrections are approximate, but first order magnitudes are indicated,
and in this view the corrections are justified.
The basic drag data were corrected for the removal of the
spreader bar. This spreading member was of circular cross section and
extended laterally across the models, normal to the keel. A drag coeffi-
eient increment was estimated for the zero lift condition which was
applied as a constant to the angle of attack data and was based on the data
of Reference 2 for an infinite circular cylinder. Thus, the correction is:
-C
D 1
cy
A cylinder drag coefficient CD 1 of 1. 2 appropriate for the
cy
Reynolds number of the member for the low-speed small scale tests was
used. The drag coefficient increment was derived for the various wing
flat plan and constructed sweep configurations studied, and the data is
shown in Figure 7.1.
The corrections for a change in the relative size of the wing
members were based on a limited amount of data available from tests of
two models which had flat plan sweeps of 45 degrees constructed to 55
degrees sweep. The leading edge and keel diameters were 1.5 and 7.0
percent of the length of these members, and the model with the larger
size members had no spreading bar and apex hinge moments were not
measured, while the other model was tested with a spreader bar. The
drag data for the latter model were corrected for removal of the spreader
bar using the procedure discussed above. Comparison of the character-
istics of the two different wings was then made and corrections for
changes in the size of the members were then developed.
The data derived for the model which has a Dlc of . O ~ 5 are
compared with data for the model with a Dlc = .07 in Figure 7.2. Based
on this comparison, using a larger leading edge size produces a small
reduction in lift which decreases with angle of attack. The same change
produces a large increase in drag at low angles of attack while the drag
is significantly reduced above 35 degrees angle of attack. Little
7-10
7-11
.04
NOTE:
2
CD BASED UPON WING AREA (600 FT )
.03 ~ - - - - - - - 4 - - - - - - - - - + - - - - - - - - ~ - - - - - - - - ; - - - - - - - - - 1
AFP
o L-______ ~ ______ ~ ______ ~ ______ ~ ______ ~
50 55 60 65 70 75
ilLE -DEGREES
Figure 7. 1 Spreader Bar Drag Coefficient Increment
l.Q
0
~
P':l
~
<:.0
ZI
<till
~ I
+.06
.... 04
+.02
C
0
~
-.02
-.04
-.06
o
.6
.5
CD
.4
.3
.2
.1
o
o
1.2
1.0
C
L
.8
.6
.4
.2
o
o
EFFECT OF MEMBER SIZE ON LONGITUDINAL
CHARACTERISTICS
/
~
/
I-' "
,
....
,
,
~
r-r-
10 20 30 40
0: - DEGREES
I
I
I
I
/)
I V
j/
V
V,
,
-
,
'"
'"
- - ~
1--'
10 20 30 40
a: - DEGREES
I
50
50
/'
I
.f
II
. .:j
//
,
/
10 20 30 40 50
ex: - DEGREES
NOTES:
1. FLA TPLAN SWEEP = 45
2. DEPLOYED SWEEP = 55
3. - L. E. DIAM. = 7% OF KEEL
LENGTH
---L.E. DIAM. =1.5o/cOFKEEL
LENGTH
4. NO SPREADER BAR
Figure 7.2 Effect of Member Size on Longitudinal Characteristics
7-12
7-13
difference in the pitching moment characteristics is indicated for the two
wings at low angles of attack, while at angles of attack above 25 degrees
the stability of the wing with the smaller members is somewhat higher.
Because of the effect of wing sweep on the angle of attack
characteristics of the Rogallo wing, corrections to account for changes
in leading edge size derived from the above data were applied to wings of
higher sweep, using lift coefficient as correlation factor. The correc-
tions are considered to be conservative and were made by modifying the
basic data at the lift coefficient for which the increment applies. Only
data for tests of models with a Dlc of .015 were modified, and therefore
the correlation was made using the lift coefficient of the model with the
Dlc of .015 upon which the corrections were based. In arriving at a
procedure, it was assumed that the correction could be applied by inter-
polating linearly with change in D/c. Only corrections to the lift and
drag characteristics were made. The slopes of the lift and drag correc-
tion curves are shown in Figure 7.3 in terms of 6C
L
and 6C
D
against
percent change in Dlc from a Dlc = .015. Using this data the correc-
tions are written:
= ("D;eC.\oo) (Die - 015) 100
,"CD = C D ; e C ~ 10') (Die - .015) 100
Data was not available which could provide a basis for deter-
mining the effect of a change in member size on the leading edge hori-
zontal hinge moments. It is expected that the effect of leading edge size
on the aerodynamic hinge moments is small.
7.3.2 Procedures Used in Estimating Effect of Suspended Load -
To the degree possible within the scope of this program, the force and
pressure data described previously were used to estimate the aero-
dynamic characteristics of the Rogallo wing without a spreading member
so as to define the variable sweep characteristics of the wing for various
capsule suspension arrangements. In evaluating these characteristics,
the pressure data were used primarily to obtain a lateral semispan
center of pressure, while the force and moment data served as a basis
for estimating the leading edge moment balance conditions as a function
of the load carried by that member.
o
.1 C
L
.1. D / C x 100
-.01
/
/
,
...............
-
-
-.02
.01
o
.1 CD
A D/
LJ C X 100
-.01
-.02
o .2 .4 .6 .8
Figure 7. -3 Effect of Change in Leading Edge and Keel Size on Lift
and Drag Characteristics
1.0
7-14
7-15
Noteworthy assumptions were required in using the wind
tunnel test data. In applying the force test data it was necessary to
assume that the inflatable members would remain effectively straight.
In view of the manner in which the aerodynamic load is applied and then
removed by the suspension system, this appears to be a reasonably
accurate approximation. Leading edge and keel deflections noted during
tow tests also support this supposition. In using the pressure data, it
was necessary to assume that the pressure distribution derived from
tests of the wings constructed from conical sections were representative
of those existing on wings with flexible membranes.
7.3.2.1 Procedures Used in Estimating Wing Variable Sweep
Characteristics in Symmetrical Flight-The methods used in ascertain-
ing the longitudinal characteristics of the flexible wing without leading
edge spreading members apply within the scope of the approximation
only to the conditions of steady accelerated or unaccelerated symmet-
rical flight. In the development of these procedures it is conservatively
assumed that the entire aerodynamic loading applied to the wing is
transmitted to the suspended body. Thus, it is assumed that the mass
of the wing is zero.
In defining the geometry of the suspension system it is
assumed that the action of the suspension cables is along a line con-
necting the wing and body attach points: i. e., there is negligible de-
flection or bowing of the support cables.
For the wing with rigid leading edges the sweep angle
assumed by the members occurs at the position where the sum of the
apex hinge moments (structural, aerodynamic, derived from suspension
loads) is zero. All leading edge normal applied loads (normal to the
leading edges and the plane containing the leading edges) are reacted by
suspension loads and the leading edge apex normal hinge moments are
automatically in balance. It is only the problem of balance of the hinge
moments in the plane of the leading edges (denoted by the NASA as
"horizontal" hinge moments) which must be studied. Thus for balance,
C
H
= C
H
H H
+ C
aero-
dynamic
HH
structural
+ C
HH
suspension
= O.
U?
0
...-I
r:Q
...-I
CD
ZI
<t
WW
~ I
The aerodynamic hinge moments are those derived from wind
tunnel test. The structural hinge moments are those that are built in at
the wing apex. The suspension hinge moments are derived from reacting
the appropriate applied aerodynamic loadings. For the symmetrical
flight condition the resultant loading of the keel in the plane of the
members is zero and therefore does not require consideration. The
loading of the leading edge and the method by which these loads are
removed, therefore, determine the magnitude of the suspension hinge
moment. The procedures used to calculate the suspension hinge moment
will be treated in some detail in subsequent paragraphs.
7.3.2.2 Wing Leading Edge Suspension Hinge Moment-The wing
horizontal suspension hinge moment can be written in terms of a single
force of magnitude F s equal to the integrated normal in-plane suspension
loading acting at the c. p. of this loading on an arm length i.. Thus,
from the following diagram, sLE
<L KEEL MEMBER
----...: - - ----
PLAN VIEW OF WING
X
S
LE
F H = F =
Hs
s
sLE
s sin A
so that
x
F
sLE
s
C
H
--
qSc sin A
HS
7-16
7-17
The force F s is a function of wing sweep, angle of attack,
etc. The wing aerodynamic loads removed by the suspension system are
only those carried externally which are the longitudinal forces for the
symmetrical flight conditions. In order to meet the requirement of
balance of the leading edge aerodynamic normal hinge moment (referred
to as the "vertical" hinge moment by NASA) and the longitudinal forces,
the suspension force center of pressure must coincide with the center of
pressure of the applied longitudinal load. Thus,
= x
c. P
LE
so that C
HH
s
F
s
=-
qS
x
c. P
LE
c sin A
When the leading edge suspension lines are considered to lie in the same
plane and this plane contains the centerline of the leading edge member,
the suspension normal force F s can be expressed quite easily as a
function of a lateral displacement of the leading edge resultant load
attachment and an angular displacement from the position of the leading
edge resultant force. The leading edge in-plane normal force in terms
of its axial and sideforce components becomes, from the following
sketch,
F = Y
s LE
s
sin A + ALE cos A
s
<L OF KEEL MEMBER
POSITNE SENSE 0 F F
s
I ____ ALE
CENTER OF PRESSURE s
....
OF AERODYNAMIC LOAD
PLAN VIEW OF WING
With expressions for the sideforce and axial suspension
forces it is then possible to define the hinge moment contribution of the
suspended load. In deriving these expressions it will be assumed that
the leading edge suspension system can be represented by a line joining
the center of pressure of the aerodynamic load and an equivalent point of
attachment to the body. The magnitude and direction of the tension in
this line determines the magnitude of these suspension forces.
OF LEADING EDGE
s
(RESULTANT OF AXIAL AND
NORMAL SUSPENSION LOADS)
HLE
s
(RESULTANT
IN-PLANE
REACTION)
PLANE OF LEADING EDGE CENTER
OF PRESSURE AND LEADING EDGE
LINE BODY ATTACHMENT
SIDE VIEW OF PLANE OF SYMMETRY
--Y L
c,P'
LE
-- Y
Y
s
att I
I
PLANE OF
SYMMETRY
REAR PROJECTION
The above sketch shows the aerodynamic reaction loads
taken by the suspension system using the representation given above.
It should be noted that in the two preceding sketches the axial suspen-
sion load is shown positive rearward in reacting positive leading edge
aerodynamic loads.
7-18
7-19
and
y
s
A
s
It is determined from the above diagram that
cos ( - e)
tan ct>
= NLE tan ( - e)
so that
Fs = NLE [tan ct> sin A + tan ( - e) cos A]
cos ( - e)
and substituting into the expression for C gives
HH
[
tan p
cos ( - e)
s
+ tan ( - e)]
tan A
X
c,P'LE
c
It is now necessary to define the terms in the above expression,
.,.....---- - - --::-y:--t"-------r-f -
c.p. y
~ ~ ~ = - - ______ ---,_w
LEADING
EDGEC.P./
X
1-_o___-- C. p. LE
X
1------ C. p.
W
..
c. p. LE
!
....
~ WING SEMISPAN CENTER
~ ..... OF APPLIED LOAD
PLAN VIEW OF WING
When the lateral position of the semispan center of pressure
is available, the leading edge normal force coefficient can be written by
beaming the semispan load between the leading edge and the keel. Thus,
Y
C.p.
w
Y
c. P
LE
and from the above figure
y
c. P
LE
Where
x
c.p.
w
=
cos 90 - A - tan
(
-1
1J
long
c and y c. p. = 1J
1at
b/2 = 1J
1at
e cos A
w
The expression for C then becomes
NLE
= ! c
2 N
w
cos
y
c.p.
w
A t
-lYe.p. )
- an w
x
c.p.
w
7-20
7-21
The dimensionx in the expression for C can be written as
c. P
LE
HH
a function of y
c. P
LE
x
c. P
LE
s
= y tan A
c. P
LE
The angle cp is the lateral angular displacement of the leading edge sus-
pension force from the leading edge longitudinal resultant force. It is
measured in the plane of the suspension force normal to the plane of
symmetry,
-1
cp = tan
y - Yatt
c.p.
cos ( - e)
The angle e can be an independent variable, and is the
angle between the leading edge longitudinal resultant force and the plane
of the wing members. Thus,
C C
-1
ALE
-1
A
w
also
= tan
C
= tan
C
NLE
N
w
x - x
-1
att
c.P'LE
( -9) = tan
z
att
where
C
N
= C
L
cos a + C
D
sin a
w w w
C
A
= C
L
sin a -
CD
cos a
w w w
In the preceding work all lengths and distances have been
considered as dimensional quantities. It is possible to non-
dimensionalize these in the expression for C
RR
by applying the
s
definitions of x and y in terms of 7J I and 7J I and
c.p. c.p. ong at
w w
specifying the location of the leading edge suspension line attachments
in terms of the reference keel length.
The methods used to estimate the lateral position of the
semispan c. p. are given in the next section. The wing longitudinal c. p.
position was obtained using the expression:
7J long
=
(.5- ::w )
w
7.3.3 Analysis of Wing Pressure Data-Wing chordwise pressure
data were available from the tests of pressure models with constructed
sweeps of approximately 50, 53, and 60 degrees. A sufficient amount
of these data were reduced to provide a basis for estimating the semispan
lateral centers of pressure for wings with constructed sweeps up to 75
degrees for flat planform sweeps of 45 and 55 degrees. These data
were used in calculating the suspension hinge moments. In addition, the
data have also been used to;)btain an indication of the distribution of the
membrane loading on the keel and leading edge members. Further,
the pressure data reduced for the 60 degree swept wing were used to
derive leading edge horizontal hinge moments which are compared
herein with the hinge moments measured during tests of the force models.
7.3.3.1 Wing Lateral Center of Pressure - The wing lateral centers
of pressure for the 45 6 flat plan sweep were derived directly from the
pressure data by initially integrating the chordwise pressure distribution
to obtain a span loading for each angle of attack studied. The centroid
or lateral center of pressure of this applied load was then determined.
The spanwise loadings, developed for the 60 degree wing are shown in
Figure 7.4 for five angles of attack. These data, in addition to data
reduced for the 53 degree sweep case were used to qualitatively
establish the lateral c. p. positions for other sweep angles by extrapola-
tion of the data to higher sweeps. The result of this work is shown in
Figure 7.5.
7-22
__
1.2
1.0
A
= 60"
LE
SYMBOL
6.
0
0
(J.
20
30
35
40
45
c c/
I. Cave
KEEL
.2 .4 .6 .8 1.0
DIMENSIONLESS SPAN STATION f"
LAT
Figure 7. 4 Span Load Distribution From Rigid Membrane Pressure Tests
7-23
-;:r
I
I:\:)
;!::o.
~
<
~
~
I
~
f
rn
rn
~
~
~
0
0::
~
~
Z
~
U
~
<
0::
~
~
<
~
.50
.40
.30
.20
.10
o
o
RYAN
__ liM. 61BI05
ALE
50
-
-
-
~
53
----
-
60
-
65
-
70
10 20 30 40 50 60
ANGLE OF ATTACK (0::) - DEGREES
Figure 7.5 Lateral Center of Pressure vs Angle of Attack - Flatplan Sweep = 45 0
7-25
The lateral c. p. data for wings with 55 degrees flat plan
sweep were estimated using the data presented above on the basis of the
assumption that wings with the same geometric spanwise twist distribu-
tion would have the same lateral c. p. position as a percent of semi-
span. A comparison of the twist geometries of conical panels represent-
ing 45 degree and 55 degree flat plan sweeps is shown in Figure 7.6.
These data are cross plotted in Figure 7.7. Table 7.1 is based on the
data of Figure 7.7, and represents a tabulation of wings of equivalent
twist constructed with 45 and 55 degree flat plan sweeps.
Sweep for Equivalent Twist, 45
0
flat plan, Deg.
55
0
flat plan
71 lat = .5
711 =.6 71
lat
= .8
sweep, deg. at
60 49.1 48.9 49.1
65 52.3 52.2 53.0
70 54.8 55.2 57.5
75 56.8 57.4 62.0
Table 7. 1 - Comparison of Wing Sweeps for Identical Twists,
Forty-Five and Fifty-Five Degree Flat Plan Sweeps.
Only small differences in 45 degree flat plan sweep equivalents are
shown for the three non-dimensional span positions. The data of Figure
7. 5, plotted in terms of the equivalent sweep for a 55 degree flat plan
is given in Figure 7.8 using the sweep equivalency from Figure 7.7 for
a non-dimensional span position 71 1 of. 6.
at
7.3. 3. 2 Horizontal Apex Hinge Moments - Horizontal apex leading
edge hinge moments have been calculated for three angles of attack
using the pressure data from tests of the 60 degree sweep model. These
calculations involved determining the magnitude and distribution of the
side loading of the conical membrane, and then beaming this loading
between the membrane and the leading edge of the wing to obtain the load
and its distribution on the leading edge. The horizontal hinge moment
was then obtained by calculating the moment resulting from leading edge
loading.
if.J
if.J
......
Cl
Z
......
LO
0
.-l
Il=l
.-l
ZI
NOTE: TWIST CALCULATIONS FOR WING PANELS
DERIVED FROM CONE SECTIONS
FLA TPLAN SWEEP = 45
I I I
FLATPLAN SWEEP = 55
I
I
I
60
50
ALE
SWEEP ANGLE
49.6
40
20
10
0
0 .2 .4 .6 .8 1.0
SPAN STATION
7l LAT.
Figure 7. 6 Wing Twist vs Span Station
7-26
6 0 ~ - - - - - - ~ - - - - - - - - ~ - - - - - - - - ~ - - - - - - - - - r - - - - - - - - ~
50
1J LAT
.8/
/
40
r:n
J:I
J:I
6
J:I
Cl
I
~
30
rJ)
>-t
~
.5
0
Z
.,..--
>-t
~
20
NOTE: TWIST CALCULATIONS FOR WING PANELS
10 t----- DERIVED FROM CONE SECTIONS.
--- FLATPLAN SWEEP == 45
- - - FLA TPLAN SWEEP == 55
o ~ - - - - - - ~ - - - - - - - - ~ - - - - - - - - ~ - - - - - - - - ~ - - - - - - - - ~
40 50 60 70 80 90
ALE - DEGREES
Figure 7. 7 Wing Twist vs Sweep Angle
7-27
.60
FLATPLAN SWEEP = 55
ALi
--------
60
~
~
~
/'
.50
~
~
H
-
~ ~
------
70
-
.. -----
75 _
-
.40
s=-
I
~
P:::
..,.-
, .30
0
r.t:J
r.t:J
~
P:::
0..
~
0
.20
P:::
~
~
Z
~
U
H
LO
~
0
P:::
.-f
~
~
.-f ~
.10
t:.D
~
ZI
H
100
~ I
o
o 40 50 10 20 30 60
ANGLE OF ATTACK ( ex;) - DEGREES
Figure 7.8 Lateral Center of Pressure vs Angle of Attack
7-28
7-2-9
The loading of the membrane was determined by plotting the
pressure data on a scale plan view of the wing panel and then fairing in
isobars based on these pressures. The pressure map derived from
plotting the data for the wing with 60 degrees sweep of 40 degrees angle
of attack is shown in Figure 7.9. The distribution of pressures on the
outer half of the membrane in planes normal to the leading edge was
then determined from the pressure map. These data were plotted as
a function of the height of the membrane (measured normal to the plane
of the leading edge and keel members) as shown in Figure 7. 10. The
integrals of these curves provided the local sideforce coefficients, and
the centers of pressure were determined. Using these data, the position
of the center of pressure of the half panel side load above the plane of
the wing members and along the leading edge was obtained. As a final
step, the portion of the panel load carried by the leading edge was
obtained by beaming the side load from the top of the conical section of
the leading edge. Appropriate corrections for reference area gave the
leading edge force coefficient, which, when multiplied by the non-
dimensional distance along the leading edge to the center of pressure,
provided horizontal hinge moment.
A comparison between the data derived from the pressure
data for the wing with 60 degrees of sweep and data obtained from
actual hinge moment measurements is shown in Figure 7. 11. Both sets
of data indicate that an increase in leading edge spreading moments is
obtained as the angle of attack is increased. Significant though small
differences in the absolute values of the hinge moment coefficients are
shown, which might be expected in view of the model geometry, etc.
7.3.4 Wing Aerodynamic Characteristics - The wing longitudinal
aerodynamic characteristics which have provided the basis for the
dynamic investigations discussed in Section 4.7 are presented in the
following paragraphs. Data for the wing in the inflated reefed condition
and in the open or filled condition are given.
7.3.4.1 Characteristics with Wing Folded - The longitudinal
characterisitcs of the wing in the reefed condition have been estimated
to provide a basis for certain load and motion studies. The estimates
are for the wing with the leading edge and keel members and membrane
folded closely together from the wing apex. These angle of attack char-
acteristics are shown in Figure 7. 12.
tn
0
....t
i!l
....t
<:.0
ZI
(Il
~ I
AP
q
2.40
2.20
1. 00
.40
- STATION FOR HORIZONTAL HINGE
MOMENT CALCULATIONS
- - STATION FOR VERTICAL LOAD
CALCULA TIONS
A 60, a: = 40
LE
Figure 7.9 Wing Planform Pressure Map
.99
83
.61
.70
.77
.82
83
.85
.83
.81
7-30
7-31
STASYMBOL
1
2
3 6.
4 <:>
5 0
6 0
__ __ +-______
q
.8 .6 .4 .2
TOP
DIMENSIONLESS HEIGHT, HI =. J 1- tot 2
H MAX V .,
Figure 7.10 Wing Side Load Distribution
o
L.E
-.12
0
0
-.08 0
..A
L. E.
55
60
0
65
FLATPLAN A L. E. 45
CALCULATED FROM PRESSURE DA T A FOR WING WITH
..A 60
L. E.
CLOSING MOMENT
o
OPE:\IKG MOMEKT
________ ________ L-______ ________ L-______ ________
o 10 20 30 40 50
ANGLE OF ATTACK - DEGREES
Figure 7.11 Comparision of Calculated and Measured Leading Edge Hinge
Moments
60
7-32
7-33
- .04
U
-
Z .03
f:3
8
.02
ril
o
U .01
E-I
::s 0
.05
-o
U .04
-
.03
.02
.01
o
5 .005
.004
f:l-
U
.003
00 .002
Up-!
.001
o
NOTE: C
L
IS BASED ON FLATPLAN
AREA OF 2,000 FT.2
./
/
V
'"
'"
V
"
'"
.-/
o 10 20 30 40 50 60 70 80 90
ANGLE OF ATTACK( a ) - DEGREES
NOTE: CD IS BASED ON FLATPLAN
2
AREA OF ,2,000 FT.
. /
/
/
V
/
V
o 10 20 30 40 50 60 70 80 90
ANGLE OF ATTACK( a)- DEGREES
!T\
I I
NOTE:
V
C
M
IS BASED ON -
J \
FLATPLAN AREA
V
\
OF 2,000 FT.2 AN
KEEL LENGTH
D
1/
1/
'"
'"
o 10 20 30 40 50 60 70 80 90
ANGLE OF ATTACK ( a )- DEGREES
Figure 7012 Lift, Drag, and Pitching Moment Coefficients of the Folded Wing
vs Angle of Attack
The estimate of the lift coefficient of the reefed wing to 50
degrees angle of attack has been derived using the procedure of Refer-
ence 2.0, applicable to low aspect ratio bodies. The drag due to lift
through 50 degrees angle of attack has also been calculated, using this
procedure and added to the expected profile drag of the folded wing.
These characteristics have been faired to 90 degrees angle of attack
using inclined cylinder and flat plan data as an indication of the trend,
and using a drag coefficient representative of the configurations for the
90 degree angle of attack conditions.
The pitching moment was based on data given in Reference
TN 3429 for a low aspect ratio body with rounded edges. Data was
available from these tests to an angle of attack of 40
0
The data was
extrapolated to zero at 90 degrees angle of attack.
7.3.4.2 Characteristics of the Open Wing -The static lift, drag, and
pitching moment characteristics for the open wing have been calculated
using the data and procedures discussed above. Estimates have been
made for wings constructed from flat plan layouts which have 45 and 55
degrees of sweep. The characteristics of these two basic wings have
been determined for four different suspension geometry arrangements
in each case.
The procedure used in calculating the wing characteristics
involved correcting the basic NASA force data, using the method given
in Section 7. 3. 1 for removal of the spreader bar and increase in
member size from a Dlc = .025. These corrections were applied to
the data for wing sweeps of 60, 65, and 70 degrees for the wing with the
45 degree flat plan sweep and 65, 70, and 75 degree swept wings with 55
degree flat plan sweep. Only wings with sweeps which, based on the
test data, demonstrated a capability of overcoming the closing hinge
moment arising from the suspended load were considered. Wings based
on flat plan sweeps of 35 degrees were not considered because of the
small range of angles of attack over which aerodynamic spreading
moments were obtained. The basic horizontal aerodynamic hinge
moment data from the NASA tests are given for wings with flat plan
sweep of 35, 45 and 55 degrees in Figures 7.13 through 7.15.
Due to the high elasticity of the inflatable leading edge
members and the inability to build insignificant hinge moments the
structural or built-in hinge moment (C
RR
\has been
structure)
7-34
= 35
RUN NO.
ALE (q)
---
.16
.16 45 3.8
o 17
50 3.8
<> 18 55 3.8
o 19 60 3.8
V 20 65 3.8
.12
CLOSING MOMENT
OPENING MOMENT
o 10 20 30 40 50 60
ANGLE OF ATTACK - DEGREES
Figure 7.13 Horizontal Hinge Moment Coefficient vs Angle of Attack
7-35
FLATPLAN A
L. E
16
RUN NO. A
L. E.
0 25 55
<>
26 60
.12
0 27 65
28 70
______ REF. MOM. AXIS
08
.04
CLOSING MOMEi\T
o
OPE KING MOMEKT
-.04
-.08 L-______ ________ ________ ______ ________ _L ______
o 10 20 30 40 50 GO
ANGLE OF ATTACK - DEGREES
Figure 7.14 Horizontal Hinge Moment Coefficient vs Angle of Attack
7-36
FLATPLAN../l LE
= 55
. 16
I I
RUN NO.
. ALE
(q)
0 10 60 3.8
0 11 65 3.8
6. 12 70 3.8
.12
REF. MOM. AXIS
C
H
H
.08
C
H
H
.04
CLOSING MOMENT
o
OPENING MOMENT
-.04
-.08
o 10 20 30
40 50 60
ANGLE OF ATTACK - DEGREES
Figure 7.15 Horizontal Hinge Moment Coefficient vs Angle of Attack
7-37
conservatively neglected in this evaluation. As discussed previously,
the aerodynamic hinge moment data have been applied directly.
The wing lift, drag, and pitching moment balance hinge
moment characteristics have been obtained to cover the expected range
of interest of suspension geometry. Variable sweep data have been
generated to show the effect of lateral, longitudinal, and vertical dis-
placements of the leading edge effective suspension line attach points for
wings with flat plan sweeps of 45 and 55 degrees. These data are shown
in Figures 7.16 through 7.23 and are used in Section 4.0 to show the
effect of the suspension variables on lift/drag ratio. In addition, the
data provides a basis for interpolation to obtain the characteristics of
the particular system studied there. The basic fixed sweep corrected
data are shown in each figure to illustrate the general relationship of
the variable sweep characteristics to the fixed sweep characteristics.
An illustration of the graphical procedure used to arrive
at the variable sweep characteristics is given by Figure 7.24. The
aerodynamic and the negative of the suspension hinge moments are
plotted to determine points of intersection in terms of angle of attack
and fixed sweep angle. Judicious interpretation of the data is required
to arrive at the characteristics representing the particular condition
studied. The characteristics of the folded wing have been used to pro-
vide an aerodynamic end point.
7.3.4.3 Longitudinal Dynamic Stability- The wing dynamic stability
derivatives used to evaluate the damping characteristics of the wing have
been estimated from aerodynamic data presented in Sections 4.2 and as
follows using NACA-TN 1423 as a reference.
The system has been assumed rigid and Command Module
effects are considered negligible.
L =: C q S
w L w w
L
w
q S
o w
w
=: (C )
L w q
o
7-38
C1Iz
7-39
NOTE:
1.0
1. FLATPLANT SWEEP ANGLE = 45
o
----f--------JI------1
2. WING ONLY
3. VARIABLE SWEEP DATA FOR:
ALE
-60
0
.81---
Zatt Ic = 0.75
Y
att
Ie = 0
9=0
--_C
L
__ 650
- - - CD
VARIABLE SWEEP WING
______ ______ ______ L_ ______ L_ ______ L_ ____
ANGLE OF ATTACK - DEGREES
.02
.01
0
-.01
-.02
,.......
V
\
ALE
11_ 65
I--
VARIABLE
.....
1\
./
\
-
F-
70
0
\
\
SWEEP WING
-.03 ,
60
-.04
o 10 20 30 40 50 60
ANGLE OF ATTACK - DEGREES
Figure 7.16 C
L
, CD' & C
m
of the Wing as a Function of Angle of Attack
I.Q
0
...-l
I=Q
...-l
ZI
c(1l
1.0
NOTE:
1. FLATPLAN SWEEP ANGLE = 45
ALE
2. WING ONLY
3. VARIABLE SWEEP DATA FOR:
.8
Zatt Ic = 0.75
Yat
t
Ic =0.1
e=o
.6
C
L
_70
CL
-CD
CD
.4
VARIABLE SWEEP WING
70
.2
ANGLE OF ATTACK - DEGREES
.02
.01
0
C"Z
.5C
-.02
-.03
V
\
A. LE
65
\
70
\
/'
\
VARIABLE SWEEP WING
,
60
-.04
o 10 20 30 40 50 60
ANGLE OF ATTACK - DEGREES
Figure 7.17 C
L
, C , & C of the Wing as a Function of Angle of Attack
D ill
7-40
7-41
NOTE:
1.0
1. FLATPLAN SWEEP ANGLE = 45
./l. LE
2. WING ONLY
3.
Zatt Ic = 0.75 60
C
L
.8
Y
att
Ic = 0
I
CD
e = 5
65
.6
C
L
I
--
VARIABLE SWEEP WING
.4
o
.02
C
1IE.5C
. 01
o
-.01
-.02
-.03
-.04
o
10
ANGLE OF ATTACK - DEGREES
..............
ALE
.-/
V
\
I- 65
----
"
1\
J---'
\
70
VARIABLE SWEEP WING
60
20 30 40 50 60
ANGLE OF ATTACK --- DEGREES
Figure 7.18 C
L
, C , & C of the Wing as a Function of Angle of Attack
D m
1.0
NOTE:
1. FLATPLAN SWEEP ANGLE = 45
2. WING ONLY
ALE
3. VARIABLE SWEEP DATA FOR:
60
.8
Zatt Ic = 1.0
Y
att
Ic = 0
9=0
65
.6
70
CL
CD
VARIABLE SWEEP WING
.4
o ~ - - - - - - ~ - - - - - - ~ - - - - - - ~ - - - - - - ~ ~ - - - - - - L - - - - - - - ~
ANGLE OF ATTACK - DEGREES
.02
.01
0
-.01
IQ
CJIr
0
.5C
1""'1
-.02
~
,-......
~
7
\
ALE
_ 65
- - - ~
~
~ ~
~
\ t--
70
,
/1
1""'1
cp
VARIABLE SWEEP WING
-.03
ZI
,
60
-
-.04
~ I
30 40 50 20 10 o 60
ANGLE OF ATTACK - DEGREES
Figure 7.19 C
L
, CD' & C
m
of the Wing as a Function 9f Angle of Attack
7-42
7-43
NOTE:
1.0 1. FLA TPLAN SWEEP ANGLE = 55
0
2. WING ONLY
3. VARIABLE SWEEP DATA FOR:
Zatt Ic = 0.75
.8
Y
att
Ic = 0
8=0
__
________ L-______ ________ ______ ______
o 10 20 30 40 50 60
ANGLE OF ATTACK - DEGREES
o
I
-.01
1'\
VARIABLE SWEEP WING
it--ATE
"
,
-.02
C1It..
-........
\\ \
.5C
-.03
-.04
\ K
\60
0
65
0
o 10 20 30 40 50 60
ANGLE OF ATTACK-DEGREES
Figure 7.20 C
L
, CD' & C
m
of the Wing as a Function of Angle of Attack
C
m
1.2
NOTES:
1. FLATPLAN SWEEP ANGLE = 55
2. WING ONLY
,
1. 0 3. VARIABLE SWEEP DATA
Z att I C = O. 75
,
Y
att
Ic = 0.1
8=0
.8 \---------+------+------- C
L
,
VARIABLE SWEEP WING
.6 \--_____ -+ _______ +-___
/170
//
/
/
o
o 10 20 30 40 50 60
ANGLE OF ATTACK - DEGREES
o
V ARIABLE\ SWEEP WING
I\.
ALE
........ '"
............ .......-, -" '-
" 70
-......... "-
-.01
-.02
'\
'\
" \ r\
,
.5C -.03
\ 60
\ 65
-.04
-.05
o 10 20 30 40 50 60
ANGLE OF ATTACK - DEGREES
Figure 7.21 C
L
, Cn' & C
m
of the Wing as a Function of Angle of Attack
7-44
7-45
C
L
CD
C
m.
5C
1.0
NOTE:
1. FLATPLAN SWEEP ANGLE == 55
0
2. WING ONLY.
3. VARIABLE SWEEP DATA FOR:
.8
Z Ic == 0.75
att
Y tiC == 0
at
e == 50
C
.6
L
-- -c
D
I
V ARIABLE SWEEP WING
.4
________ ______ ________ ______ ______
o 10 20 30 40 50 60
ANGLE OF ATTACK - DEGREES
o
VARIABLE iWEEP WING
A
LE
_
""-
__
1\
'\
,.
\ 1\
\60
0
' 65
-.01
-.02
-.03
-.04
-.05
10 20 30 40 50 60
ANGLE OF ATTACK- DEGREES
Figure 7.22 C
L
, CD' & C
m
of the Wing as a Function of Angle of Attack
LO
0
.-f
I=Q
.-f
ZI
l.2 r-------,--------,--------,-------,--------,--------,
NOTE:
I
1.0
1. FLATPLAN SWEEP ANGLE = 55 ____ -+ ____ ----c,.....,I-or-____ --i
2. WING ONLY
3. VARIABLE SWEEP DATA FOR:
I
Z att / C = 1: 0 .
. 8 1------+ Y
att
/C = 0 ------f-------+-+-------t------j
e =0
--- C
L
CD
. 6
VARIABLE SWEEP WING
75
-- o L-_____ ______ ______ ______ _L ______ ______
o
10 20 30 40
50
60
ANGLE OF ATTACK - DEGREES
.02
.01
0
-.01
C"% -.02
.5C
-.03
r , ...........
::Il-LE-
........... V"
...... " 70
-'
--..
-..........
,.-
"\
.... 75-
VARIABLE SWEEP WING
-.04
\ 65
-.05
-.06
o 10 20 30 40 50 60
ANGLE OF ATTACK - DEGREES
Figure 7.23 C
L
, CD' & C m of the Wing as a Function of Angle of Attack
7-46
C
H
H
-C
HH
S
7-47
ALE
-.02
NOTE:
1. FLAT PLAN SWEEP = 45
0
-.03
2. Z IC = 0.75
60
0
att
Y IC = 0.1
att
6=0
-.04
3. C
H
IS HINGE MOMENT
H
COEFFICIENT DUE TO
AERODYNAMIC LOADS.
4. C IS HINGE MOMENT
HH
-.05 S
COE FFICIENT DUE TO
SUSPENSION SYSTEM
-.06 _____ ______ ____ __________ ____ ___
o 10 20 30 40 50
ANGLE OF ATTACK - DEGREES
Figure 7. 24 Horizontal Hinge Moment Coefficients About Wing Apex as
a Function of Angle of Attack
60
differentiating (C
L
) w
C
G
. with respect to e gives
and
.
at () = 0 q / q ~ 1
w 0
8 ~
a e - - p v (Zs cos CY - s sin CY)
4 C
L
.'. C
L
q
8q
+
_-::_::-w'-'- (Z S cos CY - s sin CY)
C
where
C
C
C
L
q
w
m.
CY
m
q
C. G.
7T AR
=
2
+
7T
7T AR
6 C
C
L
.
= - AR
2
CY
7T 7T
AR ~
C =
-
16 AR -
m. 12 C
CY
C
C
qw
+ (C
L
m =
m
C. G.
w
qo
w
+ CD
q
s
~ sin CY ) -=-
w
qo
C
+
(CD
~ cos CY - C
L
w
qo
w
~ cos CY
qo
~ sin CY) ~ s
qo
C
7-48
7-49
differentiating Cm with respect to e gives
OC C
8q
t
c
:
w C
m
~ +
m
~ w w w +
m
o e o e e
qo qo
o e
qo
C
oa
o ~
L
cos a - C
L
~ + w
sin a 0 e
o e
+
+
+
qo
oCD
w
.
o e
CD
w
C
D
w
qo
CD
C
w
L
w
qw
qo
~
qo
o ~
o ()
~
qo
w .. q
0
sin a +
CD
w
o ~
sin a
-.-
qo
o ()
cos a
a ~ j
s +
o ()
C o e
cos a
oa
oC
L
~
sin a
w
sin a
o () o ()
qo
o ~
o e
sin a -
oa) Zs
cos a Be C
oa
however, 0 e
qw ""_- 1
is small and
oC C
m m
w w
o ~
cos a
~
qo
C
.
o fJ
+
oe
+ cos a
..
m.
()
qo
C
o ~
oCD
L
~
w
sin a +
o e
cos a +
o e
qo
CD
o ~
sin a)
t s
C C ~ w
w
+
o e
-=- + cos a
qo
C
o ()
cos a
C
o ~
o C
L D
-Y:!...
w
sin a +
o Ii
cos a -
o e
qo
C
o ~
sin a)
L
Zs w
qo
o iJ C
assuming CD
e
0
C
2V
oq
m
[ C
L
'\v COS"
C
w w
C == +
o IJ
+
m m C
qo
q
~
C
L oq
C
D
a q ] V
-55'...
V w
2 -55'...
w . s
+ 2
8 Ii
cos a +
C
aT sm a C
C
qo
+ [2 C
Dw
V
o ~
Be
qo
C
V
C
but
cos a - C
qo
L
~
Zs
C
Sin a
o ~
o e
- - p V ( Z s cos a-I. s s in a )
and letting N = (Zs cos a-I. s sin a)
then
o ~
Be
- - p V N
C may now be written
m
q
C
m
q
== C
m
~
(
(J.s
+ C . - cos a
L -
~ C
Zs ~ sin a
C
7-50
7-51
_ 4:: [c
s
C
+ ~ ( C
L
cos a +
D
sin a )
C m
C
w
w
w
Zs
(CD
C
L
a ) 1
+ -=-
cos a + sin
C w w
where
3 IT AR IT ARC IT AR
C 2
C = - - -
m 16 4
C
36
- 2
qw
C
7.3.5 Procedure Used to Determine Feasibility of Lateral
Control The feasibility of obtaining lateral control by increasing or
decreasing the leading edge angle of attack is shown by unpublished NASA
data for a 45 flat plan wing. These data were used due to the lack of
sufficient 55 flat plan data. The data are presented for a wing angle
of attack of 30 which is representative of LID max. flight. Figure
7. 25 shows that increasing the angle of attack of the leading edge with
respect to the keel results in an increased lift which produces a rolling
moment opposite to the direction of movement of the leading edge. The
effect of increasing leading edge angle of attack on normal leading edge
hinge moment is also shown in Figure 7.25. An increase in the normal
hinge moment results in an increase in the suspension horizontal hinge
moment, as may be seen in the following figure.
Leading Edge
Suspension Cable
The increment in horizontal hinge moment is C
H
sin 1>,
Vs
where a representative value of 1> is 18. The increase in horizontal
e:! 1. FLATPLAN SWEEP = 45
2. DEPLOYED SWEEP = 55
0
3. WING ANGLE OF
ATTACK = 30
U ....:l
t: U .05 t---------+------t------t-----:::;'IfI"""='---;-------t----1
...... -<::l
....:l
t3
::q
U
o
-.04
o
o
o
2 6 8 10
LEADING EDGE ANGLE OF ATTACK REF. TO KEEL , 6-DEG.
(TRAILING EDGE DOWN)
-----
-------
2 4
NOTE:
1. FLATPLAN SWEEP = 45
0
2. DEPLOYED SWEEP = 55
3. WING ANGLE OF
ATTACK = 30
/
,..
6 8 10
LEADING EDGE ANGLE OF ATTACK REF. TO KEEL, 6- DEG.
(TRAILING EDGE DOWN)
Figure 7025 Aerodynamic Effects of Changing the Leading Edge Angle of Attack
7-52
7-53
suspension hinge moment increases the sweep angle as shown in Figure
7.26. The figure also shows that increasing sweep angle results in a
loss in lift, which in effect is a rolling moment in the direction of
movement of the leading edge. The net result of increasing leading edge
angle of attack is determined as follows:
1) .6.C
L
.6.C
L
(change in L.E. angle
= x .6. 6
of attack)
.6.0
.6.C
L
x .6. A
2) .6.C
L
=
AA
(change in
sweep angle)
.6.C
H
3) .6.C
H
V
x A 0
=
.6.0
V
4) .6.C
H
= .3.6.C
HS
HV
5) M
L.\.A
.6.C
H
=
x
AC
H
HS
HS
6) therefore, .6.C
L (change
in sweep)
AC
1.
3
.6.C
d 6 } ]
L
[ dA
HV
= -- x
.6. A AC
H
.6.6
HS
Lt:l
0
.-f
I:Q
.-f
c.o
ZI
Ill
~ I
~
z
r:::I
NOTE:
U
1. FLATPLAN SWEEP = 45
0
1-1
~
2. WING ANGLE OF ATTACK = 30
0
~
~
-.02
u
~
Z
r:t:l
~
~ -.01
t5 ::qU".l
~ ~
: : r : : ~
l><:
r:t:l
~
<
Z
1-1
rs
Z
<
::q
u
0
0 2 4 6 8 10
INCREMENTAL SWEEP ANGLE
t
L1A-DEG.
NOTE:
1. FLATPLAN SWEEP = 45
0
2. WING ANGLE OF ATTACK = 30
0
~
u
-.3
~
E-t
Z
e3
u
r;::
-.2
JZ.c
~
0
C,)
~
JZ.c
I-f
~
-. 1
~
~
Z
~
0
C,)
0 2 4 6 8
INCREMENTAL SWEEP ANGLE, L1A- DEG.
Figure 7.26 Incremental Change in Apex Hinge Moment and Wing Lift
Coefficiencies vs Incremental Change in Leading Edge
Sweep Angle
10
7-54
7-55
Dividing (2) by (1)
.6C
L
[ AA
{ .3
.6C
H
} ]
v
7)
.6 C L (change in
.6A .6C
H
.66
sweep)
HS
=
.6 C L (change in
.6C
L
L.E. angle)
b.6
From Figures 7. 25 and 7. 26
= - .03
.6A
= - 400
-0.003
= + .0066
Substituting into equation (7)
.6C
L
(change in sweep) = - 1. 64 .6C
L
(change in L.E. angle).
Therefore, the net result of increasing the leading edge angle is to
develop a rolling moment in the direction of the movement of the leading
edge.
7.3.6 Procedure Used in Determination of Lateral Control Effec-
tiveness - Angular acceleration in roll has been calculated from the
following equation:
=
W x moment arm
I
x
from the following figure
moment arm = (Z att.) (sin 0)
Damping terms were assumed to be zero.
I
I
ZATT ~ <P
L ... ' ..... -..... -Moment Arm
Weight
7-56
7-57
SECTION 7.4
GLIDE PERFORMANCE ANALYSIS
The equations derived below are those used in calculating the
glide performance given in Section 4.2.
For steady state glide conditions, the following equations of
motion apply:
D - W Sin 'Y = 0 (1)
L - W Cos'Y = 0 (2)
Solving for weight from expression (2) and substituting for
W in expression (1) gives:
D - L sin'Y = 0
COS 'Y
Solving for the flight path angle yields:
'Y
-1 1
= tan (LID)
-1
= tan
1
True airspeed along the glide path can be obtained from
equation (2)
2
(C
L
) ( ~ p V) (SW) - W COS'Y = 0 and,
V =
.
(2) (Wi S) (COS 'Y )
(C
L
) ( P )
Rate of descent was determined from:
h = V sin 'Y
(3)
(4)
(5)
(6)
The expression for range with winds was obtained as follows:
The horizontal glide velocity component is:
x . - V COS 'Y V
w
(7)
The positive and negative signs preceding the term for wind
velocity (V ) denote tail and head wind conditions respectively.
w
Since
dx dx dt x
- = - =
dh dt dh h
(8)
and range,
h
x =
j
dh (9)
0
then,
h
j\v
Vt)db
dh
COS
'Y
x = =
Ii
(10)
0 0
or,
h
x =
:w) db (11)
0
The lift coefficient necessary for maximum glide range was
determined by maximizing the integrand of equation (11)
respect to C
L
. Various values of C
L
were assumed and a solution of
was obtained using the wind profile of Figure 4.16. The resultant
curves are given in Figure 7.27 for a glide with tail winds.
7-58
-1
I
01
RYAN
__ It. 61BI05
7.
NOTE:
1. W/S = 5
2. TAIL WINDS:
SOUTHERN TEXAS
6
99% PROBABILITY LEVEL 7/ I ______
OR CAPE CANAVERAL
97% PROBABILITY LEVEL I
.al:
r---tll C
L
SCHEDULE FOR
I MAX. RANGE
5 I '71 I HI/
Th j
...
50
I
41 /0 7" 7',c f
lil
Q
Q
31 1#/71//'1
60
/
lil
o
2 1 7f/ // /" I
1 rl
o .1 .2 .3 . 4 .5 .6 .7
C
L
Figure 7.27 Range - Altitude Derivative vs Lift Coefficient
7-60
The line which passes through the peak values of the curves
determines the C
L
variation with altitude for maximum range. ~ ~ was
then plotted vs. altitude (Figure 7.28) and subsequently integrated to
yield maximum range.
Time in glide was determined by:
h
t
~ I (dt)
(12)
o
Turning performance has been determined using the follow-
ing equations and the assumptions of no wind and a coordinated turn.
Altitude change:
.
~ h =
( ~ ) ( ~ ~ )
(13)
where
.
WV
2
SIN 'Y h COS 'Y
(14)
=
~
g L SIN cp
and
COS
1
cp
=
-
h
(15)
Horizontal distance change:
~ S ( ~ t ) (V COS'Y ) (16)
where
~ t =
M
~
(17)
and
g L SIN cp
~
=
w V COSy
(18)
NOTE:
1. W/S = 5
2. TAIL WINDS:
SOUTHERN TEXAS, 99% PROBABILITY LEVEL
OR CAPE CANAVERAL, 97% PROBABILITY LEVEL.
8
~ I.e:
'tj'tj
ril
:>
:,/
'"
6
1-1
E--4
<
e
~
ril
Cl
ril
Cl
/
'"
4
~
E-4
-
1-1
E-4
~
<
2
I
ril
0
U?
~
0
~
M
r:Q
M
""
o
ZI
o 20 40 60 80 10
WI
~ I
ALTITUDE-1,OOO FT.
Figure 7028 Range Altitude Derivative for Maximum Range vs Altitude
7-61
Section
7.5.1
7.5.2
7.5.3
7.5.4
7.5.5
7-62
SECTION 7.5
LANDING FLARE ANALYSIS PROCEDURES
TABLE OF CONTENTS
Equations of Motion
Aerodynamic Functions
Cockpit Display
Recordings Used For Study
Automatic Landing System Analysis
Page
7-63
7-64
7-65
7-65
7-65
SECTION 7.5
LANDING FLARE ANALYSIS PROCEDURES
7.5.1 Equations of Motion - The equations of motion used for the
paraglider analog simulation were:
m (u + Qw) = F
x
- mg sin
m (w- Qu) = F + mg cos
z
I e =
Y
where
=
C
N
z
W
= C q Sc
and
w = w - x e
w s
u
w
q
=
=
=
u - e
s
2
1/2 pV T
2
1/2 P V T
tan
-1 w
u
w
+
C qwS
NL
+
mC
e
e
0
+%qS
C
O!
=
w
'Y
=
.
h =
S =
x
O!
C
w
tan
-1 w
--
u
w
e - O!
V
T
sin
'Y
V
T
cos 'Y
+ i
c
7-63
7-64
C
N
==
C COS Q! + C sin Q!
W
LW DW
C == C cos a - C
L
sin a
AW DW
W
C == C
L
cos a +
CD
sin a
NC
C C
C = C cos a C
L
sin a
AC
D
7.5.2 Aerodynamic Functions - The aerodynamic functions were
simulated by a curve fitting method which resulted in the following
coefficient equation forms.
C ~
3
+ K4 (a
W
- a )
OL
== C
== 0
m
o
== -.014
c
+
+ K (a
6 W
i-
s
+ C -- +
N
W
c
2
- a )
OL
c
2
- a )
OL
.
C q e
m
c
MC
= 0
CAT
==
-C
sin iC
+ C
cos iC
NC AC
C
CN'
== C
cos iC
+ C
A
sin iC
C
MC
C
C ==
-C cos O!
AL DL
C
N
= C sin O!
L
DL
7.5.3 Cockpit Display - The Ryan fixed base simulator cockpit
was utilized in the longitudinal simulation study of the paraglider. The
design of the cockpit, when integrated with the analog computing
equipment, is such that control information may be introduced into the
analog set-up and the effects received on its instrument panel.
In the paraglider study, the instrumentation was made
available by use of the meter and lamp indicator panel on the cockpit.
This information, a function of aerodynamic data, was interpreted and
calibrated to give the pilot vehicle velocity, altitude, rate of sink, Rls
Error, and c. g. indications. The lamp indicators used, provided
touchdown information and an indication when O! == 52 (C
L
max).
The only control used from the cockpit was stick control
which provided movement of the c. g. by pilot control for landing the
vehicle.
7.5.4 Recordings Used for Study - The information on this
simulation study was recorded on two 6-channel oscillographs. Data
consisted of variables on each flight giving simultaneous reference to
velocity, altitude, rate of sink, 'Y, h , h , on one recorder, and e,
x z
.
e, O! ,and c. g. position on the other oscillograph.
w
7. 5. 5 Automatic Landing System Analysis - Landing systems
which provide constant flight path angle commands for either flared or
hard landings do not satisfy the paraglider landing flare requirements.
7-65
7-66
The low LID characteristics of the system simulated immediately
indicated minimum equilibrium sink rates of 25 ft. Isec.
The general concept of the automatic landing system provides
a method of reducing the rate of sink to an acceptable value along with
minimum total velocity at touchdown. Since the minimum equilibrium
sink rate is not satisfactory for landing, the system must detect the
appropriate time to initiate the flare maneuver and provide the appro-
priate control during the flare. Since the complete flare maneuver is
a vehicle transient, the automatic landing system must reduce the
system energy to a minimum, with small error at touchdown. To
provide the automatic landing system with this capability, it is necessary
to know the altitude above terrain and sink rate.
The flaring maneuver for the paraglider vehicle, as per-
formed by the automatic system, utilized longitudinal c. g. movement.
The c. g. movement was controlled as a function of altitude and sink-
rate. The movement of the c. g. which approximated the most effl cient
method of flaring, as determined by computer parameter studies, may
be considered to consist of three phases.
The initial movement is simply a low rate of increase of
p. , c. g. distance from the c. p. along the keel axis, beginning at an
s
altitude satisfying the equation.
h = -k h
1
Once this rate is initiated it remains until touchdown.
The second phase is a period of proportional control
initiated at an altitude satisfying the equation
h = -k h
2
(1)
(2)
During this phase a rate of sink error is calculated from equation 2 and
a control input proportional to the error is developed. The c. g. move-
ment is then a sum of the two input signals where,
M = -k (k h + h)
s 3 2
(3)
The third phase is the addition of a second constant rate
increase of f. at some altitude h . The complete equation for the c. g.
s 1
position for the automatic flares simulated was
s
== + stick input + k t + k (k h + h + k
4
) + k t
1 3 2 5
St
where
= c. g. position in keel axis
s
== Trim c. g. position
St
stick
input = c. g. movement due to stick input
K
2
= rate of increase of f..
s
= flare control gain constant
= flare control gain constant
= constant proporti.onal to rate of sink commanded at
touchdown
K
5
= rate of increase of
s
The simulated equation of the c. g. position was
100
s
c
+ 100
c
s
t
stick input + lOOk
1
[
'" "'. h "']
-5 k3 (k2 h + 10 + 100k
4
)
'" " ,
t + lOOk t
5
(4)
7-67
7-68
alternate forms of this equation are
i
s
i
s
l
"' "' "' '". h
= i +.324 100k
1
t + 100k
5
t - 5k3 (k2 h + 10
St
I II ]
+ 100k
4
)
[
III III II II.
= i +.324 100k
1
t + 100k
5
t - 5k3 (k2 h + h +
St
II ]
+ 100k
4
)
i = i + k t + k t + k (k h + h + k )
s St 1 5 3 2 4
where,
III II III
K1 =.005
K3
= .lK
3
= .03751
III II III
K1
= 32.4K
1
= .162
K4
= 10K
4
= .120
II II III
K2
=K
2
= 2.40
K2
= 10K
2
= 2.40
II III
K3
=
-1. 62 K3
= -.0608
K5
= .0051
II
K4
=
100 K4
= 12.0
K6
= .700
III
K5
= 32.4 K5
= .1652
also,
K1 = 0 until
. h
-K h =
6 10
III
h
III
K3
= o until -K h
=-
+ 100K
4 2 10
K5
= o until h = 10,000 K7
K
= .0025
7
7-69
0
l
:
-
I
\
l
:
-
I
'
8
~
J
>
j
\
.
J
\
&
~
.
j
r
/
Y
l
,
.
.
.
n
lJ
r
<
-
-
-
=
-
.
,
]
'
~
4
-
>
'C
I
J
.
/1
(
0
0
.......
.
J
.......
-
-
-
F
0
.
.
e
:
.
V
J
.
.
,
~
Q
'
"
S
C
\l
1
-
l
b
.O
C
\l
.
.
.
.
.
~
.......
C
\l
~
0
.
.
.
.
.
C
Il
~
Q
)
S
.
.
.
.
.
~
O
':
l
I
N
:
C
\:l
.
I
:
-
Q
)
~
1
'-1
I
;
:
J
b
.O
.
.
.
.
.
(
~
3
'
....J
-
-
-
-
-
-
0('
-0('
iTo
",'
'iO';'Oio
-c-;;:.:)'
("':. -';)'
I().O(IO
....
.II
'" :v
.....
:II
-;>-
::.v
:;1'-.
:::v
""i"-
.!V
tt
30
-100
i,-
;00
?o
'0
2
-If,rn'i'I'O
t
3
-fP----
ct;
'1'
...!
,
'"
.or7S
s.
.S2.5
65.'00
SI.,50
" '1' .1
0
"
" .
_1,,0
..
'1Irc::::LJ i'100 3. 0/.,
oiIrcD.,.
..
2.f
CA
c.
...
, .-.;->
.
- rooCAC
:r
, 2 3 I't
.0"
Po;" .,
:.::::::r 2 m q
.",2
00
0>--@------rn 0<':
[!]>------@---- e OIW'SK.
2 CAL" ...
, r---=-->
J
2 CHL 'f ...
:r
2c". 'fw
S .,fa.
L.&., 6
'-
<!z )
L- iDO,,", .,00
'----- 9
'.Flt 5
1-
.IU
,>
Sc
" otoo"ooo ,/6. 11,
I
1#,000
/.
2
of'II)OC .....
7.
.737(/
eM
..
..
-/00 c.. ",
" "
_IN)
ZsZ, -100 eM .......
Co.
---e
r--
V
.--
.U6Co&".
_ !H/OO e .... -100
2' 26
---v,:::- '0
In
" -"" :z. -
I. 7''S CtIoL
32
100 ell..,
r
J
J
(K'''')
,
..
110
.'
.,00
Q4l
62
-/00
" '
_/OOC" ...
3
" k
So
L:.Y
0
I. ,.
20 ;iJa 'I :/No
"
:!' F.
3
lOGO
I 3
MACH... pACE' F
IIMruIIERS 25
1 26
2 '0
3 2a
4 29
. 30
61 131
7J 132
33
.9 34
10 35
11 36
12 'D
113 38
14 39
15 40
16 41
17 42
. I
::r
+'"
2 CAw 'fw
COCKPIT
CPP. Bo o"5 1-
------1 ............
fr:i)
I
IU)
lEV
-./.;\1"", (D ,.. 1
v( .. RI
h
,.;
Vr
Ris ....
-r;D.
12
Ie
J.." ....
11 (AT "'w"R 2 ---@I(.
I
-------1
5TICK PoT
""00 ----I
I
BI>,"7 DAtE- ENGINEER 'TITlE
POTS. 29 54 TRUNKS INTERCONNECTS 25 so 75
5 30
6
51 76
52 77
55
56
18 1 26
1. 2 27
7 32 57 20 3 2a 53 78
8 33 5a 21 4 29 54 79
. ..
80
56 SYMBOLS 10 35
34 59
22 5 30
23 6 31
57
5a AMPUFIEI
59
SUMMER
60 o.
INVERnR
61 AMPLIfiER
11 36
12
13 3a
14 39
15 40
TRUNKS 24 7 32
25 a 33
26 9 34
27 10 35
2a 11 36
62
o POTS. 63
64 C) .
65 UIHR&CUIIJi&M1
.. D TR:KS
16 41
17 42
18 43
19 44
20 4S 9
29 12 37
30 13 38
31 14 39
32 15 40
33 16 41
7
21 46 10 34 17 42 67 o MULnPLE
68
UNEAR P,LOT CaM Pf)t.JFI'JTS' I 18 43 22 47
II.
35 18 43 11
---- - -- ----
69 o SERVO
POT.
70
NON-LINEAl:
71
SERVO
72
POT.
73 I (5. HIGH GAIN
AMPLIFIER
74
_.J 44 23 48
20 POTS. 24 49
21 1 25 so
22 2 26 51
23 3 '0 52
'4 41 2a 53
36 19 44
37 20 45
38 21 46
39 22 47
40 23 48
24 49
12
13
14
15
16
17
ANALOG-COMPUTOR WORK SHEET RYAN ADOIIAUTJCAL CO.
SAN. DIEGO; CALIFORNIA.
Figure 7.30 Paraglider 3-Degree of Freedom Longitudinal Dynamic Study
Apollo Capsule Application
7-71
.!l2 I
1000
!!!.
'"
" ..
-IFz
jDDo
..
.ofF AT
+c
-D
'D
-e
.,.E 'E'T
..
!
32
-"" T
...,.0
129 f 1 I I 1
f
I Yr I I isl
.
-",'
700
l>
nJ
",'
36 23
"'-
-",'
tOo
",'
,;0,000
-'I-
S
fh
I I I I I I I I :G;) I [26
-,000 e
-v,:-
IS;' -----
Bf(r
ONE'
--
Rll+)
-or.
L-=-iY 1+ I 't- f F
_(o< .... _OI-, ..)"t..
,6
o
--.---.-
, .. .... ):r.
+111 .. ('$) 35 'f IO,DClO
.
r----
AUTOMATIC lANDIHcr SWITCHING-- CiRCUITRY
!.
:--.... ih r;;;.. - X PLOTTfR
-ltJD(?)---------(!) RI (-)
.is 1-T. @---@>------<E]
Ijl
'I'
-------'.
kill'
.3>1-1-------------'
Figure 7.31 Paraglider 3-Degree of Freedom Longitudinal Dynamic Study Apollo
Capsule Application
7-72
LQ
0
,.-i
p:)
,.-i
c.o
ZI
lm
~ I
SECTION 7.6
WING PARAMETRIC STRUCTURAL ANALYSIS
The analysis presented in this section presents weight and
packaged volume data imposed by the structural requirements.
Aerodynamic heating is not considered in the analysis since
the deployment velocity is less than Mach 1. O. The material used in the
analysis is a dacron cloth impregnated with polyester. This cloth is
identified as a Dupont DD-7 cloth.
Wing Area
ALE = 55 (FLAT PATTERN)
O. 574 . 2 (Ft 2)
EQ. 1
Wing Loading
The wing loading is a function of the keel length.
W W
( ~ : 2 )
- (EQ. 2)
S
0.57 4.Q 2
W == Gross Weight (Lbs)
S == Wing Flat Area (Ft 2)
7-73
Membrane Analysis
(
90-A
~ SIN 2 LE
L. E.
R
FLAT PATTERN
s = 2Re
S
- == sin {3
2
S
R =-
2e
S == 2 sin {3
Where
S = arc length
~ sin
(90 -2
ALE
)
sin e ==
R
S
(90 -A )
sin 2 LE
2e sine
sine
CO-A )
2 sin 2 LE
=
e s
7-74
For this study, a L. E. sweepback angle of 70 will be considered.
or
Now
sine
= 0.577
.. e
R
e = 1.715 Radians
~ sin (90 -2 ALE)
sine
R = 0.175
Wing Membrane Weight
sin [90; 70]
0.99019
(EQ. 4)
The wing membrane requirements are based on the hoop
tension loads induced by the aerodynamic pressure on the membrane.
where
N = Hoop Load per Foot of Width (lb/ft 2)
P = Wing Loading ==
N
= W R
S
W
S
(EQ. 3)
The pressure load on the wing is assumed uniform over the
entire area. It is also assumed that the membrane takes the shape of a
circular arc under load.
R = 0.175 (EQ. 4)
7-75
7-76
N
W
(0.175)
.574.2
0.305
W
= -
or
nW
( l ~ : ) , including Vertical Load Factor
N 0.305
z
=
(EQ. 5)
f.
where
f. = Keel length (ft.)
n = Vertical load factor
z
W= Gross weight (lbs.)
The following figure gives a representative relationship
between strength and weight for dacron cloth coated with a polyester
coating.
C\l
Cl
:>;
~
CI)
~
u
Z
16
~
0
- 12
~
Z
~
~
f:Q
8
~
~
~
0.050 N
o
E-;
4
~
0
.....
~
00
~
100 200 300
~
~
NO (STRENGTH/INCH OF WIDTH) LBS/IN.
Based on the figure, the membrane weight in ounces per
square yard is given by Equation 6.
W = 0.050 N
m 0
where
2
(Ounces/Yd )
N = Required strength per inch
o
Replacing N by EQ. 5, the unit membrane weight per
o
square foot of area becomes
Wm = 0.050 [0.305 nzw
1
12
-5 n W 2
0.883 x 10 _z_ (lbs/ft )
.
or multiplying by the wing area S
1
16
. ~ ]
gives
(EQ. 6)
W
m
-5
0.507x10 n'W
Z
(EQ. 7)
Packaged Volume of Wing Membrane
Wing Area = 0.574 . 2
Wing Membrane Packaged Volume = 0.574 . 2t
where
= Feet
t = Feet
For the purposes of this analysis, a linear relationship
will be assumed between thiclmess and strength. This relationship
7-77
7-78
will be based on a dacron cloth 0.008 inches thick and a unit strength of
150 lbs/in. The equation yielding this relationship is:
t == 0.0000044 N (Inches)
0
(EQ. 8A)
N
== Lbs/in.
0
.yolume
:::
0.574 2 (0.0000044 N ) 12
0
:::
0.000030212 N (Ft
3
)
0
0.305 n W
N N
z
(lbs/ft)
::: :::
0
(EQ. 5)
:. Volume
-5 2
[o.305
I
n
z
W]
1
:::
3.021 x 10
12
-7
(Ft
3
)
==
7.67 x 10 n W
z
(EQ. 8B)
Load Distribution
The load distribution between the leading edges and keel
was determined in the following manner. The semi-span was divided
into segments taken parallel to the trailing edge of the wing. The
pressure distribution on each segment was integrated and the centroid
of load for each segment was found. This load, in turn, was beamed
between the leading edge and keel. The loads on the leading edge and
keel were accumulated, and the analysis indicated that 42.3% of the
total normal load was carried by the keel and 28.9% of the load was
carried by each leading edge. The detailed analysis of the load distri-
bution may be found in Section 5.1 and elsewhere in the Appendix.
YI
1:.
(
I.Q
0
M
r:Q
M
~
ZI
iilI
~ I
The following figure gives the idealized distribution used in
the analysis.
F
1. 40 Y
1. 32 /L
1. 20
1. 00 = 40
0.80
O.GO
0.40
0.20
0
0 0.20 0.40 0.60 0.80
xlQ
For simplicity, cables used were assumed equally spaced.
Since maximum tube strength requirements were dictated by the load-
ing near the center of the tube, the total load will be a function of the
maximum distributed load. This assumes that the tube strengths will
not be varied by tapering wall thicknesses, varying internal pressures,
etc.
The maximum bending moment is found by the equation
1 1 1 1 1 1
M
Y
4n
2y
2 2n 3 2n 2n
2
y Q
=--
_ .z.
8n 2
2
12n
2
1. 00
y P.
(ft-Ibs)
(EQ. 9)
=--
2
24n
7-79
7-80
The first term of the moment equation gives the bending due
to the membrane loads. The second term gives the reverse bending due
to the gusset loads.
y = distributed load 1. 32 F / . (lbs/ft)
where
F = Total load on beam (lbs)
. Total length of beam (ft) \
n number of cables
The distribution of the membrane load on the leading edges
and keel, as previously stated, gives the following equations.
Keel Moment Equation:
but
=
M =
.. K
=
1. 32 (.436) n W
z
0.576n W
z
(ft-lbs)
.
0.576n W .
2
z
2
24n .
0.024n W .
z.
(ft-lbs)
2
n
(EQ. 10)
Leading Edge Equation:
but
M
.. LE
1. 32 (. 282) n W
O.372n W
z
2
O.372n W
z
2
24 n
O.0155n W
z
2
n
z
(ft-Ibs)
Tube Pressurization Requirements
(EQ. 11)
The internal pressure required for stabilization of the tube
is determined by the bending loads. In any inflatable structure, the
characteristic mode of failure is the wrinkling of the tube surface. An
advantage in the analysis of inflatable structures is that the prediction
of failures are almost entirely independent of the tube material. It is
required that the tube material be relatively thin so that it will not
support compression. Therefore, when the compression loads are ap-
plied to the tube which exceed the membrane tension induced by internal
pressure, buckling occurs. Although static tests of inflatable tubes
indicate that the buckled tube will support considerably more load, the
design of the Apollo Landing System is based on initial buckling load.
7-81
7-82
Longitudinal Membrane Stress
pR
=-
2t
Longitudinal Membrane Stress
Mc
=-
I
pR
=-
2t
(point of initial buckle)
p(req'd)
where M
R
p
p(req'd)
p(req'd)
= pR
2t
=.E.
2
= foot - lbs
= feet
lbs per sq. foot
2
2 (0. 024n W R/n
z
=
R3
7r K
O.0153n W
[lbs/ft2 - keel]
z
=
2
R
3
n K
2
2 (0. 0155n W /n )
z
=
7rRLE
3
(pressure induced)
(bending induced)
O.00987n W
[Lbs/ft
2
- L. E.]
z
=
2 3
n RLE
(EQ. 12)
(EQ. 13)
(EQ. 14)
LQ
0
~
p:)
~
t.O
ZI
~
~ I
Assuming that the pressure in both the keel and leading edge
tubes are equal, Equations 13 and 14 are equated and solved for
R - KR
K LEo
0.0153n WP..
z
:. 0.0153 RLE
3
R 3
LE
0.00987n W P..
z
0.00987 RK3
0.6450R
K
3
R = 0.865R
K LE
The hoop membrane load for the L. E. is given by
0.00987 W P..
2 2
n RLE
(Ref. EQ. 14)
(EQ. 15)
(EQ. 16)
Preliminary aerodynamic studies indicate that a L. E.
diameter to length ratio of 0.025 is desirable. Using this factor
DLE
0.025 K (Ft)
RLE =
0.0125 K (Ft) (EQ. 17)
or
0.00987 n W
z
pR =
LE
n
2
(0.000156)2
63. 27n W
z
n
2
(lbs/ft) (EQ. 18)
but
pR
LE
= N
=
Membrane load/foot of width
7-83
7-84
Tube Material Weight
The membrane weight per unit area relative to the membrane
allowable strength per unit width is given by Equation 6 for dacron cloth
impregnated with polyester.
W
m
0.050 No [ounces/Yd
2
]
= 0.050 No [:6 x ~ ]
0.00034 N (lb/ft
2
)
o
Replacing N by N gives
o
but
W = 0.0018 n ~ w (lb , unit membrane wt)
m n ft2
W
m
W
m
Surface area of leading edge = 1TDLE LE
nzW 2
= 0.0018 -- x 0.0785
n
2
n W
-4 z
= 1.413 x 10 ---
2
n
(EQ. 6)
(Ref EQ. 16)
(EQ. 19)
but
or
and
now
The hoop membrane load for the keel is given by
0.0153 n W Q
z
2 2
n R
K
R = 0.0125Q
LE K
0.865 RK
0.865 RK
0.0125 Q
K
W
m
2 2
RK 0.000209 Q
K
73.20 n W
z
2 Q
n K
[ Ib/ft
2
]
0.00034 N (lb/ft 2)
o
(EQ. 6)
7-85
but
and
or
now
7-86
Again substituting N for N gives
o
W = 0.00034
m
= 0.00208
[
73n' 220
f
n
z
w] 112
n W
z
n
2
f
[ lbs/ ft
2
unit membrane wt.]
Surface area of keel = 1TD f
K K
. 0.865 D = 0.025 f
., K K
2
= 0.0907 fK (surface area only)
n W
W = 0.00208 z (0.0907 fK2)
m n
2
f
W
m
(EQ. 20)
(EQ. 21)
Tube Material Volume
Volume = 7TD Q K t
Where
D = Diameter of Tube
Q = Length of Tube
t = Thickness of Tube
N
HOOP
= pR
-6
tReq'd = 4.4 x 10 N
HOOP
-6
= 4.4 x 10 p R
Keel Tube
N = p R
HOOP K K
=
0.0153n W Q
z K
lbS/
f oot
(EQ. 20)
(EQ. SA)
7-S7
O. 0153n
z
W K
n
2
(0. 01495 K)2
68.4n W
z
[ lb/
ft
]
=
2
n K
-6 r
S
4nZ
W ]
1
t = 4.4 x 10 2 (inches)
Req'd
n K
12
-5
2.51 x 10 n W
z
=
2
n K
-6
2.08 x 10 n W
z
(Feet)
=
2
n K
Volume
D
K
1('K
(2. 08 x 10-
6
n
z
W)
=
(n
2
K)
-6
1(' (0.0289 K2)
(2.08 x 10 n W)
z
=
2
n K
-7
1. 895 x 10 n z W K
(Ft. 3)
=
2
(EQ. 22)
n
7-88
L. E. Tube
N
HOOP
:=
PLER
LE
9.87
-3
x 10 n W .
z K
:=
RLE
2 3
n RLE
9.87
-3
x 10 n W .
z K
(Ib/ft)
2 2
n RLE
-4
8.22 x 10 n W .
z K
(Ib/. )
:=
2 2
III
n RLE
8.22 x
-4
10 n W.
z K
n
2
(0.0125 . K)2
5.27n W
z
(Ib/. )
==
2
In
n . K
t 4.4 x
-6
[5.:: l ~ W]
10 (Inches)
II:>
Req'd
0
..-I
~
..-I
c.o
-5
ZI
2.32 x 10 n W
z
~ M f u
2
(Inches)
~ I
n . K
1. 934 x
-6
10 n W
z
2
(Feet)
n . K
7-89
7-90
Volume =
-6
1. 934 x 10 n W
z
2 f.
n K
-7
1. 52 x 10 n W f.
z K
(Ft
3
) =
Wing Cables
2
n
For simplicity, all cables will be designed to the
maximum cable load.
The maximum cable load is given by
f.K
1.32F
P = y- =
c n
=
n
F = 0.436 n W (keel)
max z
(0.436 n W) (1. 32)
:. P
z
=
c n
max
0.576 n W
z
[ lbs - Max. cable load 1 =
n
Cable Weight
(EQ. 23)
(EQ. 24)
The following equation relating the weight to strength of
nylon cables is based on Figure 7.32.
y = (1. 015)
-5
(10 ) x - (2)
-3
(10 ) (EQ. 25)
.12
.10
v
..-.
.08
~
f:>:..!
~
~
~
-
~
::r:
.06
C)
>-I
~
~
V= 0.000010.5X - 0.002
D
.04
+y
.02
/
+x
o
o 2000 4000 6000 8000 10000
STRENGTH (LBS)
Figure 7.32 Nylon Rope Unit Weight Relative to Allowable Strength
7 -91
where
y = lbs/ft
x = Strength (Lbs)
Substituting P = x in Eq. 25
c
max
yields
Y
= (1. 015)
(10-
5
)
[ O. 576
n
n
z
W
] -3
- 2 x 10
-6
(5.846) (10 ) n W
-3 z
= - 2 x 10
(lbs/
ft
)
n
z = Distance between capsule c. g. and wing plane
c
= 0.75 iK
Cable Volume
The equation which gives the volume of the cables is:
-7
Y = (1. 905) (10.) x (Ref. Figure 7.33) (EQ. 27)
where
y = volume per unit length (Ft
3
/Ft)
x = strength required
7-92
.010
.008
.006
:>1 .....
M
~ I ~
~ ~
~ .004
~
~
~
0
:>
~
.....
S
.002
o
-7 ~
905 )<. 10 ____
-------
~
~
t-X
~
~ I
o 2000 4000 6000 8000 10000
STRENGTH (LBS)
Figure 7.33 Nylon Rope Unit Volume Relative to Allowable Strength
7-93
7-94
Substituting P (EQ. 24) = x in EQ. 27
c
max
(1. 9) (10-
7
)
(0.576n W)
(Ft
3
/Ft)
z
y =
(
n )
(10 -7)
n W
(1. 09)
z
(3n) y =
n
(3.27)
-7
= (10 ) n
z
W K
Gas Requirements for Pressurization
but
Volume of tubes = V b (Ft
3
)
tu es
V 2
tubes = 1f R K
2 2
:. Vtubes = (2 RLE + 1. 336 RLE ) 1f K
(EQ. 28)
(EQ. 29)
The volume, pressure, and temperature relationships are
given by the classic equation:
The upper case subscript denotes the tank. The lower case
subscript denotes the tubes.
Assume that the tank is spherical in shape. The maximum
allowable diameter is equal to the keel diameter.
4 3
V T = 3" 7f R (Volume of tank)
However
D
K
_ ~ D 3
6 K
1.156 DLE
1. 156 (0.025) Q
K
0.0289 Q
K
~ [0.0289] 3
(EQ. 30)
7-95
P
t
RLE
RLE
3
P
T
T
T
T
t
P
t
7-96
0.00987 n
z
W K
[ Ibs/
ft
2
]
2R 3
n LE
=
0.0125 K
= 1. 95 x 10-
6
K3
0.00987 n
z
W K
=
1. 95 x
10 -6 3 2
K
n
3
5.06 x 10 n W
[
Ibs
1
z
=
2 2
ft2
n K
= 110
0
F = 570
0
R
= 40
0
F = 420
u
R
ptV
t
TT
=-- x
=
=
=
T V
T t
5.06 x 10
3
n W
z
2 n 2
n x-K
4.845 x
10
3
n W 3
z K
5.305 x
0
3
2 5
1 n K
5
3
0.00168 K
420
9.133 x 10 n W
[ ~ l
z
2 2
ft2
n K
570
or
3
6.34 x 10 n w
z
2 P. 2
n K
(psi)
The weight of the gas is found by
pV = wRT
w =
PT
=
V
T
=
R =
T =
w =
=
=
pV
RT
5
9.133 x 10 n W
z
2
n P.K
2
12.63 x
10-6 . 3
K
53.30
570
0
R
9.133 x
5
10 n W 12.63 x
z
2
n P.K
2 53.3 x
-1 3
115.35 x 10 P. n W
K z
2 2
30381 n P.K
-4
3.79 x 10 . n W
K z
2
n
Obs)
(lbs)
-6
10 P.K
3
570
(EQ. 31)
7-97
Tank Weight
The tank is constructed of stainless steel for this analysis.
The tensile ultimate range is between 175,000 psi to 200,000 psi.
9.133 x
5
10 n W
z
PT
=
2
2
n K
f
pR
=-
t 2t
t
pR
=-
2f
t
5
W
RK
9.133 x 10 n
z
= x
2 2 2 x F
t
n .Q
K u
RK
= 1. 156R
LE
RLE
=
0.0125 K
RK
= 1. 156 (0.0125 K)
=
0.01445.QK
F
tu
= 175,000 psi
25,200,000 Lb/ Ft
2
=
7-98
but
t
., Req'd
=
DK
=
WT
T
=
=
5
9.133 x 10 n
z
W (0.01445 .Q
K
2.Q 2 2(25,200,000)
n K
0.00026 n W
z
(0.00026 n W)
z
2 .Q
n K
2
0.4026 D n W
K z
0.02890 .Q K
(.285)
0.4026 (2.89
-2 2
10 .Q) n W x
K z
2
n .Q
K
-4
n W.Q 3.363 x 10
z K
2
n
(1728)
(EQ. 32)
(EQ. 33)
-6 -4- n
z
W .Q
K
Total weight = 63.854 x 10 n W.Q + 11. 869 x 10 2
z K
n
-3
- 4.5 x 10 n .Q
K
(EQ. 34)
7-99
7-100
-7 n
z
W.R.
K
7
Total volume = 4.935 x 10 2 + 10.94 x 10 - n W.R.
n z K
+ 12. 63 x 10-
6
.R. 3
K
In using the parametric weight and volume curves which
summarize the analysis, careful note should be taken of the following
assumptions and conditions considered in this study.
The flat plan leading edge sweep is 55. The loading
condition considered is for a flight sweep of A LE == 70 at an angle
of attack of 40. The leading edge diameter is held constant at 2. 5% of
the keel length. In the calculations of the weight, strength, and thick-
ness of the fabrics, a linear relationship is assumed based on a Dupont
DD-7 cloth impregnated with a 3 M 4222 polyester coating. It should be
understood that the assumptions made with respect to the material call
for a theoretical optimization which in some cases lies outside of the
present fabric capabilities. However, since the parametric study is to
be used for comparative purposes only, it is felt that the assumptions
used are valid.
Вам также может понравиться
- TDRS-I Mission Press KitДокумент12 страницTDRS-I Mission Press KitBob AndrepontОценок пока нет
- A Much Unsung Hero, The Lunar Landing Training Vehicle: And Other NASA RecollectionsОт EverandA Much Unsung Hero, The Lunar Landing Training Vehicle: And Other NASA RecollectionsРейтинг: 5 из 5 звезд5/5 (1)
- Second Semiannual Report To The Congress, April 1, - September 30, 1959Документ259 страницSecond Semiannual Report To The Congress, April 1, - September 30, 1959Bob Andrepont100% (1)
- Nasa Secrets the Story of the Space Shuttle Vehicles— Launching SatellitesОт EverandNasa Secrets the Story of the Space Shuttle Vehicles— Launching SatellitesОценок пока нет
- NASA News: Pr0SS Kit Project FLTSATCOM-DДокумент9 страницNASA News: Pr0SS Kit Project FLTSATCOM-DBob AndrepontОценок пока нет
- Biological Experiments in Space: 30 Years Investigating Life in Space OrbitОт EverandBiological Experiments in Space: 30 Years Investigating Life in Space OrbitОценок пока нет
- Sequential Events Control SystemДокумент49 страницSequential Events Control Systemjackie_fisher_email8329100% (1)
- Explorer VII Press KitДокумент21 страницаExplorer VII Press KitBob AndrepontОценок пока нет
- Atlas Centaur (AC-67) Lightning Strike Mishap 1987Документ12 страницAtlas Centaur (AC-67) Lightning Strike Mishap 1987rtphokieОценок пока нет
- Signifigant Achievements in Satellite Meteorology 1958-1964Документ149 страницSignifigant Achievements in Satellite Meteorology 1958-1964Bob Andrepont100% (1)
- Information: Titan II Space Launch Vehicle ProfileДокумент2 страницыInformation: Titan II Space Launch Vehicle Profileedkyle99Оценок пока нет
- Lageos Press KitДокумент24 страницыLageos Press KitBob AndrepontОценок пока нет
- Fltsatcom-D Press KitДокумент9 страницFltsatcom-D Press KitBob AndrepontОценок пока нет
- Intelsat IV-A (F3) Press KitДокумент13 страницIntelsat IV-A (F3) Press KitBob AndrepontОценок пока нет
- Apollo Training Telecommunication ProgramДокумент132 страницыApollo Training Telecommunication ProgramuebriccОценок пока нет
- Ranger VII Press KitДокумент62 страницыRanger VII Press KitBob AndrepontОценок пока нет
- Fltsatcom-E Press KitДокумент9 страницFltsatcom-E Press KitBob AndrepontОценок пока нет
- Apollo Experience Report Protection of Life and HealthДокумент34 страницыApollo Experience Report Protection of Life and HealthBob AndrepontОценок пока нет
- Gemini Reentry Communications ExperimentДокумент30 страницGemini Reentry Communications ExperimentBob AndrepontОценок пока нет
- National Launch Vehicle Summary. Revision 3Документ56 страницNational Launch Vehicle Summary. Revision 3Bob AndrepontОценок пока нет
- Emergency Detection System: Table of ContentsДокумент31 страницаEmergency Detection System: Table of Contentsjackie_fisher_email8329Оценок пока нет
- SMS-B Press KitДокумент17 страницSMS-B Press KitBob AndrepontОценок пока нет
- A Satellite View of Typhoon Marie 1966 DevelopmentДокумент99 страницA Satellite View of Typhoon Marie 1966 DevelopmentBob AndrepontОценок пока нет
- Landsat D Press KitДокумент43 страницыLandsat D Press KitBob AndrepontОценок пока нет
- Solar Powered SatellitesДокумент1 176 страницSolar Powered SatellitesAviation/Space History LibraryОценок пока нет
- Ninth Semiannual Report To Congress 1 Jan. - 30 Jun. 1963Документ232 страницыNinth Semiannual Report To Congress 1 Jan. - 30 Jun. 1963Bob Andrepont100% (2)
- UK-6 Press KitДокумент16 страницUK-6 Press KitBob AndrepontОценок пока нет
- Apollo Experience Report Guidance and Control Systems Lunar Module Stabilization and Control SystemДокумент20 страницApollo Experience Report Guidance and Control Systems Lunar Module Stabilization and Control SystemBob AndrepontОценок пока нет
- Ranger 5 Press KitДокумент43 страницыRanger 5 Press KitBob Andrepont100% (1)
- STS-44 Press InformationДокумент126 страницSTS-44 Press InformationBob AndrepontОценок пока нет
- RCA Satcom 1R Press KitДокумент8 страницRCA Satcom 1R Press KitBob AndrepontОценок пока нет
- Ariel I, The First International Satellite Project SummaryДокумент76 страницAriel I, The First International Satellite Project SummaryBob AndrepontОценок пока нет
- Space Shuttle Solid Rocket Booster Frangible Nut Crossover SystemДокумент2 страницыSpace Shuttle Solid Rocket Booster Frangible Nut Crossover SystemBob AndrepontОценок пока нет
- Seventeenth Semiannual Report To Congress, 1 January - 30 June 1967Документ279 страницSeventeenth Semiannual Report To Congress, 1 January - 30 June 1967Bob Andrepont100% (1)
- Apollo 8 Mission AS-503Документ77 страницApollo 8 Mission AS-503Aviation/Space History Library100% (1)
- Gemini 9 Voice Communications TranscriptДокумент349 страницGemini 9 Voice Communications TranscriptBob AndrepontОценок пока нет
- Twenty-First Semiannual Report To Congress 1 January - 30 June 1969Документ251 страницаTwenty-First Semiannual Report To Congress 1 January - 30 June 1969Bob Andrepont100% (1)
- Alouette-IsIS Program SummaryДокумент94 страницыAlouette-IsIS Program SummaryBob AndrepontОценок пока нет
- NASA Facts The Advanced Communications Technology Satellite (ACTS) A Switchboard in The SkyДокумент8 страницNASA Facts The Advanced Communications Technology Satellite (ACTS) A Switchboard in The SkyBob AndrepontОценок пока нет
- NASA Facts Launch Complex 39, Pads A and B 2004Документ8 страницNASA Facts Launch Complex 39, Pads A and B 2004Bob Andrepont100% (1)
- Quick Scatterometer LaunchДокумент26 страницQuick Scatterometer LaunchBob AndrepontОценок пока нет
- Nasa Facts Altus II How High Is High 2003Документ3 страницыNasa Facts Altus II How High Is High 2003Bob AndrepontОценок пока нет
- RCA Satcom V Press KitДокумент7 страницRCA Satcom V Press KitBob AndrepontОценок пока нет
- The Eclipse ProjectДокумент178 страницThe Eclipse ProjectBob Andrepont50% (2)
- Thirteenth Semiannual Report To CongressДокумент277 страницThirteenth Semiannual Report To CongressBob Andrepont100% (2)
- The Ariel I SatelliteДокумент18 страницThe Ariel I SatelliteBob AndrepontОценок пока нет
- Project Saturn Fact SheetДокумент7 страницProject Saturn Fact SheetBob AndrepontОценок пока нет
- Apollo 10 Onboard Voice Transcription LMДокумент264 страницыApollo 10 Onboard Voice Transcription LMBob AndrepontОценок пока нет
- STS-36 National Space Transportation System Mission ReportДокумент30 страницSTS-36 National Space Transportation System Mission ReportBob AndrepontОценок пока нет
- Hubble Facts Hubble Space Telescope Servicing Mission 3A S-Band Single Access TransmitterДокумент2 страницыHubble Facts Hubble Space Telescope Servicing Mission 3A S-Band Single Access TransmitterBob AndrepontОценок пока нет
- Apollo 9 Onboard Voice Transcription LMДокумент287 страницApollo 9 Onboard Voice Transcription LMBob AndrepontОценок пока нет
- Apollo 13 PAO Mission Commentary TranscriptДокумент930 страницApollo 13 PAO Mission Commentary TranscriptBob AndrepontОценок пока нет
- Fifth Semiannual Report To CongressДокумент240 страницFifth Semiannual Report To CongressBob Andrepont100% (1)
- Tenth Semiannual Report To Congress July 1 - December 31, 1963Документ242 страницыTenth Semiannual Report To Congress July 1 - December 31, 1963Bob Andrepont100% (1)
- Sixteenth Semiannual Report To Congress, 1 July - 31 December 1966Документ292 страницыSixteenth Semiannual Report To Congress, 1 July - 31 December 1966Bob AndrepontОценок пока нет
- Extreme Ultraviolet Explorer Long Look at The Next WindowДокумент28 страницExtreme Ultraviolet Explorer Long Look at The Next WindowBob AndrepontОценок пока нет
- Ads 2011-2553 PDFДокумент11 страницAds 2011-2553 PDFMike BrynerОценок пока нет
- Boeing 777 High Lift Control System: IEEE Aerospace and Electronic Systems Magazine September 1993Документ8 страницBoeing 777 High Lift Control System: IEEE Aerospace and Electronic Systems Magazine September 1993Manuel HervasОценок пока нет
- Stress Analysis Aileron PDFДокумент8 страницStress Analysis Aileron PDFNarendra PalandeОценок пока нет
- Campaign For PetersburgДокумент84 страницыCampaign For PetersburgBob Andrepont100% (3)
- American: Here Over The British Turn The The TheДокумент100 страницAmerican: Here Over The British Turn The The TheBob Andrepont100% (1)
- Chickamauga and Chattanooga BattlefiledsДокумент68 страницChickamauga and Chattanooga BattlefiledsBob Andrepont100% (4)
- Arkansas Post National MemorialДокумент2 страницыArkansas Post National MemorialBob Andrepont100% (1)
- Castillo de San MarcosДокумент70 страницCastillo de San MarcosBob Andrepont100% (2)
- Chief Joseph's People and Their WarДокумент28 страницChief Joseph's People and Their WarBob Andrepont100% (1)
- Their Stories Women in The U.S.-mexican WarДокумент2 страницыTheir Stories Women in The U.S.-mexican WarBob AndrepontОценок пока нет
- AntietamДокумент68 страницAntietamBob Andrepont100% (3)
- Boston and The American RevolutionДокумент100 страницBoston and The American RevolutionBob Andrepont100% (2)
- ChalmetteДокумент64 страницыChalmetteBob Andrepont100% (1)
- AndersonvilleДокумент24 страницыAndersonvilleBob Andrepont100% (3)
- The Civil War in The Trans-Mississippi Theater, 1861-1865Документ60 страницThe Civil War in The Trans-Mississippi Theater, 1861-1865Bob Andrepont100% (4)
- Battlefields Around Fredericksburg PDFДокумент48 страницBattlefields Around Fredericksburg PDFBob Andrepont100% (2)
- Lock Stock and BarrelДокумент2 страницыLock Stock and BarrelBob Andrepont100% (3)
- Advanced Redoubt of Fort BarrancasДокумент2 страницыAdvanced Redoubt of Fort BarrancasBob AndrepontОценок пока нет
- From The Golden Gate To Mexico City The U.S. Army Topographical Engineers in The Mexican War, 1846-1848Документ372 страницыFrom The Golden Gate To Mexico City The U.S. Army Topographical Engineers in The Mexican War, 1846-1848Bob AndrepontОценок пока нет
- A Thunder of CannonДокумент249 страницA Thunder of CannonBob Andrepont80% (5)
- CMH Pub 73-1 - Mexican War - Gateway South The Campaign For MonterreyДокумент36 страницCMH Pub 73-1 - Mexican War - Gateway South The Campaign For Monterreyorabera100% (1)
- Guns Along The Rio Grand Palo Alto and Resaca de La PalmaДокумент32 страницыGuns Along The Rio Grand Palo Alto and Resaca de La PalmaBob AndrepontОценок пока нет
- Desperate Stand The Battle of Buena VistaДокумент44 страницыDesperate Stand The Battle of Buena VistaBob Andrepont100% (1)
- A Charming Field For An EncounterДокумент76 страницA Charming Field For An EncounterBob Andrepont100% (2)
- The Civil War On The Atlantic Coast, 1861-1865Документ64 страницыThe Civil War On The Atlantic Coast, 1861-1865Bob Andrepont100% (3)
- The Maryland and Fredericksburg Campaigns, 1862-1863Документ64 страницыThe Maryland and Fredericksburg Campaigns, 1862-1863Bob Andrepont100% (2)
- The Occupation of MexicoДокумент48 страницThe Occupation of MexicoBob Andrepont100% (1)
- A House DividedДокумент1 страницаA House DividedBob AndrepontОценок пока нет
- Dust Off Army Aeromedical Evacuation in VietnamДокумент148 страницDust Off Army Aeromedical Evacuation in VietnamBob Andrepont100% (2)
- CMH Pub 75-18 The Army and Reconstruction, 1865-1877Документ76 страницCMH Pub 75-18 The Army and Reconstruction, 1865-1877Bob Andrepont100% (2)
- The Gulf Theater, 1813-1815Документ52 страницыThe Gulf Theater, 1813-1815Bob Andrepont100% (1)
- The Petersburg and Appomattox Campaigns, 1864-1865Документ72 страницыThe Petersburg and Appomattox Campaigns, 1864-1865Bob Andrepont100% (3)
- The Civil War Ends, 1865Документ76 страницThe Civil War Ends, 1865Bob Andrepont100% (2)
- Procedures For Approval of Service Suppliers v2.9 June 2021Документ72 страницыProcedures For Approval of Service Suppliers v2.9 June 2021Cleverson SchmidtОценок пока нет
- Pirates of The CaribbeanДокумент5 страницPirates of The CaribbeanAnnie Faulve Ondillo-Naoe0% (2)
- JJJJJДокумент1 страницаJJJJJGiga GiggaОценок пока нет
- Surface TolerancesДокумент9 страницSurface Tolerancesshrinivast100% (1)
- Parts Catalogue - Yamaha Ego AvantizДокумент53 страницыParts Catalogue - Yamaha Ego AvantizHamzah Hussain60% (5)
- DP Requirements For Drilling and Intervention UnitsДокумент38 страницDP Requirements For Drilling and Intervention UnitsRoyОценок пока нет
- Nove Tehnologije Montaže Brodskog Trupa U Brodogradnji: New Technologies For Hull Assemblies in ShipbuildingДокумент10 страницNove Tehnologije Montaže Brodskog Trupa U Brodogradnji: New Technologies For Hull Assemblies in Shipbuildingmarkoperic2014Оценок пока нет
- Andhra Pradesh Automobile and Auto Components Policy 2015-20Документ19 страницAndhra Pradesh Automobile and Auto Components Policy 2015-20Harshith TammuОценок пока нет
- Off Highway 24 Volt Quick Reference GuideДокумент4 страницыOff Highway 24 Volt Quick Reference GuideAgus YulfizarОценок пока нет
- Moveable Span Bridge Study Volume 2 Bascule and Swing Span Bridges Part 2 PDFДокумент54 страницыMoveable Span Bridge Study Volume 2 Bascule and Swing Span Bridges Part 2 PDFaqhammam100% (1)
- Lifesport's Free Bike Repair GuideДокумент7 страницLifesport's Free Bike Repair GuideLifesport ShopsОценок пока нет
- Indian RailwayДокумент44 страницыIndian RailwayamarkondekarОценок пока нет
- Basics On Transmission LinesДокумент44 страницыBasics On Transmission LinesDayan Yasaranga100% (1)
- Training Scania 2Документ6 страницTraining Scania 2Kharis Mahfudz0% (1)
- Sales Order Life CycleДокумент44 страницыSales Order Life Cyclemoin786mirzaОценок пока нет
- Cayman (987) 2006 Wiring DiagramsДокумент55 страницCayman (987) 2006 Wiring Diagramsrichweiner40% (10)
- The Alaska-Siberia Connection. The World War II Air Route (Texas A&m Univ.)Документ148 страницThe Alaska-Siberia Connection. The World War II Air Route (Texas A&m Univ.)dopeyagainОценок пока нет
- Sop Standard Operating ProceduresДокумент3 страницыSop Standard Operating ProceduresTaha SaadanОценок пока нет
- HK 345 L9+L6: Knuckle Boom CraneДокумент9 страницHK 345 L9+L6: Knuckle Boom Cranealexandre krzesinskiОценок пока нет
- Mahindra LogisticsДокумент21 страницаMahindra LogisticsSaksham SharmaОценок пока нет
- Pavement MarkingДокумент3 страницыPavement Markingsethu1091Оценок пока нет
- LF Ebook PC S S H-L 2012 inДокумент330 страницLF Ebook PC S S H-L 2012 in11tata100% (1)
- Dwnload Full Business Data Networks and Telecommunications 8th Edition Panko Test Bank PDFДокумент36 страницDwnload Full Business Data Networks and Telecommunications 8th Edition Panko Test Bank PDFchebaccoeggnogoetw7100% (15)
- PC300 8M0 PDFДокумент12 страницPC300 8M0 PDFDin Udin0% (1)
- Install Torque Strut at Front AxleДокумент4 страницыInstall Torque Strut at Front AxleNoir OctobreОценок пока нет
- 8 Major Types of Cargo Transported Through The Shipping IndustryДокумент10 страниц8 Major Types of Cargo Transported Through The Shipping IndustryGiorgi KandelakiОценок пока нет
- 132kV Underground Cable DesignДокумент7 страниц132kV Underground Cable DesignAdamОценок пока нет
- Mobile Crane Operation Procedure1Документ11 страницMobile Crane Operation Procedure1AkimBiОценок пока нет
- Vio80U: Call For Yanmar SolutionsДокумент12 страницVio80U: Call For Yanmar SolutionsLuka BornaОценок пока нет
- Vocabulary English File Intermediate - FrenchДокумент37 страницVocabulary English File Intermediate - French- -0% (1)
- Guardian Angel: Life and Death Adventures with Pararescue, the World's Most Powerful Commando Rescue ForceОт EverandGuardian Angel: Life and Death Adventures with Pararescue, the World's Most Powerful Commando Rescue ForceРейтинг: 4 из 5 звезд4/5 (2)
- High Altitude Sickness, A Simple Guide To The Condition, Diagnosis, Treatment And Related ConditionsОт EverandHigh Altitude Sickness, A Simple Guide To The Condition, Diagnosis, Treatment And Related ConditionsОценок пока нет
- Wing Theory in Supersonic Flow: International Series of Monographs in Aeronautics and AstronauticsОт EverandWing Theory in Supersonic Flow: International Series of Monographs in Aeronautics and AstronauticsОценок пока нет
- Boundary Layer Flow over Elastic Surfaces: Compliant Surfaces and Combined Methods for Marine Vessel Drag ReductionОт EverandBoundary Layer Flow over Elastic Surfaces: Compliant Surfaces and Combined Methods for Marine Vessel Drag ReductionОценок пока нет
- Environmental Stress: Individual Human AdaptationsОт EverandEnvironmental Stress: Individual Human AdaptationsLawrence FolinsbeeОценок пока нет
- Canopies Of Blue:: The U.S. Airborne Experience In The Pacific In WWII As A Case Study In Operational Art And Multi-Role FlexibilityОт EverandCanopies Of Blue:: The U.S. Airborne Experience In The Pacific In WWII As A Case Study In Operational Art And Multi-Role FlexibilityОценок пока нет
- Boundary Layer and Flow Control: Its Principles and ApplicationОт EverandBoundary Layer and Flow Control: Its Principles and ApplicationОценок пока нет
- The Physiological Effects of High Altitude: Proceedings of a Symposium Held at Interlaken, September 18-22, 1962От EverandThe Physiological Effects of High Altitude: Proceedings of a Symposium Held at Interlaken, September 18-22, 1962Оценок пока нет
- Nathan Zuntz: His Life and Work in the Fields of High Altitude Physiology and Aviation MedicineОт EverandNathan Zuntz: His Life and Work in the Fields of High Altitude Physiology and Aviation MedicineОценок пока нет