Вам также может понравиться
- 80 Series V: Calibration ManualДокумент36 страниц80 Series V: Calibration ManualLuis GasparОценок пока нет
- Product and Price Guide: Model Year 2020 - Released January 2020Документ27 страницProduct and Price Guide: Model Year 2020 - Released January 2020Luis GasparОценок пока нет
- Electronic Engine ControlДокумент19 страницElectronic Engine ControlSohail Bashir97% (31)
- Electronic Engine ControlДокумент19 страницElectronic Engine ControlSohail Bashir97% (31)
- Audi allroad quattro - Combining the Best of an Estate and Off-Road VehicleДокумент76 страницAudi allroad quattro - Combining the Best of an Estate and Off-Road VehicleSimon Chell100% (6)
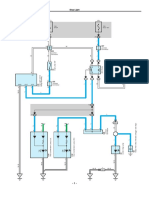
- Stop Light PDFДокумент2 страницыStop Light PDFLuis GasparОценок пока нет
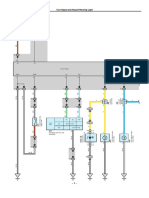
- Turn Signal and Hazard Warning Light PDFДокумент5 страницTurn Signal and Hazard Warning Light PDFLuis GasparОценок пока нет
- Manuale Motori Ac enДокумент39 страницManuale Motori Ac enLuis GasparОценок пока нет
- Guide to geometric shapes and symbolsДокумент134 страницыGuide to geometric shapes and symbolsLuis GasparОценок пока нет
- Navigation Unit - EWD PDFДокумент12 страницNavigation Unit - EWD PDFLuis GasparОценок пока нет
- Navigation Unit - EWD PDFДокумент12 страницNavigation Unit - EWD PDFLuis GasparОценок пока нет
- Article - Road Induced Interior Noise - Michelin - Mueller-BBMДокумент6 страницArticle - Road Induced Interior Noise - Michelin - Mueller-BBMLuis GasparОценок пока нет
- Stop Light PDFДокумент2 страницыStop Light PDFLuis GasparОценок пока нет
- 6th Central Pay Commission Salary CalculatorДокумент15 страниц6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- 6th Central Pay Commission Salary CalculatorДокумент15 страниц6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- Turn Signal and Hazard Warning Light PDFДокумент5 страницTurn Signal and Hazard Warning Light PDFLuis GasparОценок пока нет
- 3 - Cyl. Diesel EngineДокумент128 страниц3 - Cyl. Diesel EngineDan Și Maria MierluțОценок пока нет
- D3E801B26A2-4-Cylinder Common Rail Engine (1 6 L EA189)Документ542 страницыD3E801B26A2-4-Cylinder Common Rail Engine (1 6 L EA189)ranjitv10100% (2)
- Daytona 150E Engine: Owner's ManualДокумент59 страницDaytona 150E Engine: Owner's ManualLuis GasparОценок пока нет
- VW 1.4L TSI Engine - SSP - 359Документ64 страницыVW 1.4L TSI Engine - SSP - 359freefly286% (7)
- Fiat 127 PDFДокумент34 страницыFiat 127 PDFLuis Gaspar100% (2)
- Bravo-A Service Manual Vol1Документ544 страницыBravo-A Service Manual Vol1Luis GasparОценок пока нет
- DIESEL DV6TED4 ENGINE DIRECT INJECTION SYSTEMДокумент266 страницDIESEL DV6TED4 ENGINE DIRECT INJECTION SYSTEMdearon100% (2)
- BboneДокумент246 страницBboneLuis GasparОценок пока нет
- VW 1.4L TSI Engine - SSP - 359Документ64 страницыVW 1.4L TSI Engine - SSP - 359freefly286% (7)
- DIESEL DV6TED4 ENGINE DIRECT INJECTION SYSTEMДокумент266 страницDIESEL DV6TED4 ENGINE DIRECT INJECTION SYSTEMdearon100% (2)
- b800 BMW Airbag SrsДокумент16 страницb800 BMW Airbag SrsLuis GasparОценок пока нет
- 6025AДокумент13 страниц6025ALuis GasparОценок пока нет
- 3 - Cyl. Diesel EngineДокумент128 страниц3 - Cyl. Diesel EngineDan Și Maria MierluțОценок пока нет
- BboneДокумент246 страницBboneLuis GasparОценок пока нет
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
- Mamdani SugenoДокумент34 страницыMamdani SugenoNoormalita Irviana100% (1)
- Undergraduate ExamsДокумент2 страницыUndergraduate ExamsEverlyn Glenys Tall TanОценок пока нет
- Indicator: 8 M's of Teaching MilieuДокумент4 страницыIndicator: 8 M's of Teaching MilieuCzarina Krystal RivadullaОценок пока нет
- 19 Types of Graphic OrganizersДокумент24 страницы19 Types of Graphic OrganizersRia LucenaОценок пока нет
- Chapter 1 - Public SpeakingДокумент20 страницChapter 1 - Public SpeakingJay Son100% (1)
- Manuel V. Gallego Foundation Colleges, Inc. Cabanatuan City, PhilippinesДокумент12 страницManuel V. Gallego Foundation Colleges, Inc. Cabanatuan City, PhilippinesEdelmar BenosaОценок пока нет
- 2023 Work Immersion Portfolio 1 1Документ42 страницы2023 Work Immersion Portfolio 1 1Joemari Malic CristobalОценок пока нет
- Exams and Revision: ContentsДокумент4 страницыExams and Revision: ContentsshalashviliОценок пока нет
- PM620 Unit 4 DBДокумент3 страницыPM620 Unit 4 DBmikeОценок пока нет
- Develop Effective ParagraphsДокумент8 страницDevelop Effective ParagraphsLA Ricanor100% (1)
- Strategies for Mastering the TOEFL iBT Reading SectionДокумент3 страницыStrategies for Mastering the TOEFL iBT Reading SectionCloud AtlasОценок пока нет
- CSKM Magazine 2017Документ88 страницCSKM Magazine 2017ajayinfotechОценок пока нет
- DLL - Grades 1 To 12Документ6 страницDLL - Grades 1 To 12Elaine Cachapero AzarconОценок пока нет
- MANGLICMOT LDM MPCES MinДокумент10 страницMANGLICMOT LDM MPCES MinHilda ManglicmotОценок пока нет
- WK 8 Conflict - Management - Skills LaptopДокумент24 страницыWK 8 Conflict - Management - Skills LaptopAMEERA SHAFIQA MOHD RASHIDОценок пока нет
- DLL Q4 All Subject Week 2Документ71 страницаDLL Q4 All Subject Week 2Lorefe Delos SantosОценок пока нет
- 6 - MODUL Oral Presentation 2014 - MhsДокумент24 страницы6 - MODUL Oral Presentation 2014 - MhsJessille silvОценок пока нет
- Action Reflection Learning - SingaporeДокумент1 страницаAction Reflection Learning - SingaporeRonaldz72Оценок пока нет
- Self Leadership AssignmentДокумент7 страницSelf Leadership AssignmentGiles CreelmanОценок пока нет
- Introduction To Written Communication: Some Basic PrinciplesДокумент18 страницIntroduction To Written Communication: Some Basic PrinciplesanchalОценок пока нет
- The Essence of NarcissismДокумент39 страницThe Essence of NarcissismV_Freeman100% (1)
- Knight Vs Samurai ProjectДокумент2 страницыKnight Vs Samurai Projectapi-334125776Оценок пока нет
- Angyris's Single and Double Loop LearningДокумент14 страницAngyris's Single and Double Loop LearningtashapaОценок пока нет
- Pangasinan State University 2Документ4 страницыPangasinan State University 2Emmanuel Jimenez-Bacud, CSE-Professional,BA-MA Pol SciОценок пока нет
- Benefits Management Framework Sample ChapterДокумент24 страницыBenefits Management Framework Sample Chapterisnooks100% (3)
- Winter Break Assignment for Class VIДокумент1 страницаWinter Break Assignment for Class VIibadaligОценок пока нет
- Itcp Mid pt2Документ9 страницItcp Mid pt2EISHA SHAYKHОценок пока нет
- Global JusticeДокумент15 страницGlobal JusticeBaljit GrewalОценок пока нет
- Components of AttitudesДокумент4 страницыComponents of Attitudessoulorseeker38Оценок пока нет
- M. B. A S - H S (M) : Sistio R IGH Chool AINДокумент5 страницM. B. A S - H S (M) : Sistio R IGH Chool AINRowena Sta Maria100% (2)