Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Icwe14 - Id02441 HfpiДокумент36 страницIcwe14 - Id02441 HfpiSergio StolovasОценок пока нет
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- A Design Guide For Footfall Induced Vibration of StructuresДокумент84 страницыA Design Guide For Footfall Induced Vibration of StructuresJose Rzal67% (3)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Vibration Design of FloorsДокумент20 страницVibration Design of Floorsgabimaier31Оценок пока нет
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (894)
- Monday Schedule for Structural Wind Engineering ConferenceДокумент15 страницMonday Schedule for Structural Wind Engineering ConferenceSergio StolovasОценок пока нет
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Monday Schedule for Structural Wind Engineering ConferenceДокумент15 страницMonday Schedule for Structural Wind Engineering ConferenceSergio StolovasОценок пока нет
- Ice Cream: Uses and Method of ManufactureДокумент6 страницIce Cream: Uses and Method of ManufactureMari LizОценок пока нет
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Moment Baseplate DesignДокумент10 страницMoment Baseplate DesignNeil JonesОценок пока нет
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- L16 CRE II Heterogeneous Catalysis: Prof. K.K.Pant Department of Chemical Engineering IIT DelhiДокумент25 страницL16 CRE II Heterogeneous Catalysis: Prof. K.K.Pant Department of Chemical Engineering IIT DelhiMehul VarshneyОценок пока нет
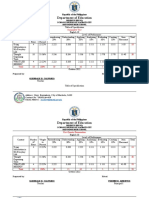
- Table of Specification ENGLISHДокумент2 страницыTable of Specification ENGLISHDonn Abel Aguilar IsturisОценок пока нет
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- Honey Commission InternationalДокумент62 страницыHoney Commission Internationallevsoy672173Оценок пока нет
- PLC 2 Ladder DiagramДокумент53 страницыPLC 2 Ladder DiagramAnkur GuptaОценок пока нет
- Final Exam: Functional Performance Testing: Technical vs. Process CommissioningДокумент9 страницFinal Exam: Functional Performance Testing: Technical vs. Process CommissioningBen MusimaneОценок пока нет
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Navid DDLДокумент7 страницNavid DDLVaibhav KarambeОценок пока нет
- D5435 PDFДокумент6 страницD5435 PDFZamir Danilo Morera ForeroОценок пока нет
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- ASTM C 136 Sieve Analysis of Fine and Coarse Aggregates (D)Документ5 страницASTM C 136 Sieve Analysis of Fine and Coarse Aggregates (D)Yasir DharejoОценок пока нет
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- SiargaoДокумент11 страницSiargaomalouОценок пока нет
- Google Fusion Tables: A Case StudyДокумент4 страницыGoogle Fusion Tables: A Case StudySeanОценок пока нет
- Pengenalan Icd-10 Struktur & IsiДокумент16 страницPengenalan Icd-10 Struktur & IsirsudpwslampungОценок пока нет
- Clinic Management System (24 PGS)Документ24 страницыClinic Management System (24 PGS)pranithОценок пока нет
- Develop Your Kuji In Ability in Body and MindДокумент7 страницDevelop Your Kuji In Ability in Body and MindLenjivac100% (3)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Db2 Compatibility PDFДокумент23 страницыDb2 Compatibility PDFMuhammed Abdul QaderОценок пока нет
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- Appointment Letter JobДокумент30 страницAppointment Letter JobsalmanОценок пока нет
- Sprite Graphics For The Commodore 64Документ200 страницSprite Graphics For The Commodore 64scottmac67Оценок пока нет
- Indian Oil Corporation- Leading Indian State-Owned Oil and Gas CompanyДокумент10 страницIndian Oil Corporation- Leading Indian State-Owned Oil and Gas CompanyPrakhar ShuklaОценок пока нет
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Learn Six Sigma Process and Methodology BasicsДокумент4 страницыLearn Six Sigma Process and Methodology BasicsGeorge MarkasОценок пока нет
- Lesson Rubric Team Group (Lesson Plan 1)Документ2 страницыLesson Rubric Team Group (Lesson Plan 1)Yodalis VazquezОценок пока нет
- COS1512 202 - 2015 - 1 - BДокумент33 страницыCOS1512 202 - 2015 - 1 - BLina Slabbert-van Der Walt100% (1)
- Excellence Range DatasheetДокумент2 страницыExcellence Range DatasheetMohamedYaser100% (1)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
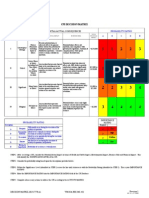
- Decision MatrixДокумент12 страницDecision Matrixrdos14Оценок пока нет
- Chapter 3 - Basic Logical Concepts - For Students PDFДокумент65 страницChapter 3 - Basic Logical Concepts - For Students PDFTiên Nguyễn100% (1)
- Receiving Welcoming and Greeting of GuestДокумент18 страницReceiving Welcoming and Greeting of GuestMarwa KorkabОценок пока нет
- The Effect of Reward Practices on Employee Performance in Ethio TelecomДокумент29 страницThe Effect of Reward Practices on Employee Performance in Ethio TelecomZakki Hersi AbdiОценок пока нет
- Recording and reporting in hospitals and nursing collegesДокумент48 страницRecording and reporting in hospitals and nursing collegesRaja100% (2)
- The History of American School Libraries: Presented By: Jacob Noodwang, Mary Othic and Noelle NightingaleДокумент21 страницаThe History of American School Libraries: Presented By: Jacob Noodwang, Mary Othic and Noelle Nightingaleapi-166902455Оценок пока нет
- JEE Test Series ScheduleДокумент4 страницыJEE Test Series ScheduleB.K.Sivaraj rajОценок пока нет