Вам также может понравиться
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- 45.AB KR Lithosphere2021Документ22 страницы45.AB KR Lithosphere2021norbi34Оценок пока нет
- Morisson - A Brief Introduction To Magnetotellurics and CSEMДокумент75 страницMorisson - A Brief Introduction To Magnetotellurics and CSEMnorbi34Оценок пока нет
- Constable - Occam Inversion To Generate Smooth 2D Models From MT DataДокумент12 страницConstable - Occam Inversion To Generate Smooth 2D Models From MT Datanorbi34Оценок пока нет
- Ashafani - Directional Borehole Logging Configurations Using DC and Telluric Methods For Detecting Deep Conductors Not Intersected by WellsДокумент34 страницыAshafani - Directional Borehole Logging Configurations Using DC and Telluric Methods For Detecting Deep Conductors Not Intersected by Wellsnorbi34Оценок пока нет
- Force Technology - Ground Penetrating RadarДокумент2 страницыForce Technology - Ground Penetrating Radarnorbi34Оценок пока нет
- Geophysics - Articles About IP MethodДокумент162 страницыGeophysics - Articles About IP Methodnorbi34Оценок пока нет
- Groundwater Text PDFДокумент8 страницGroundwater Text PDFGhassen LaouiniОценок пока нет
- Zhang - Most Frequent Value Statistics and Distribution of 7li Abundance ObservationsДокумент6 страницZhang - Most Frequent Value Statistics and Distribution of 7li Abundance Observationsnorbi34Оценок пока нет
- Preliminary Geophysical Evaluation of Orin Bauxite DepositДокумент6 страницPreliminary Geophysical Evaluation of Orin Bauxite Depositnorbi34Оценок пока нет
- Tixier - Log Evaluation of Non-Metallic Mineral Deposits PDFДокумент22 страницыTixier - Log Evaluation of Non-Metallic Mineral Deposits PDFnorbi34Оценок пока нет
- New Evidence On An Episode of Geomagnetic Instability, Recorded in Middle Miocene Lava Flows in Northwest IcelandДокумент16 страницNew Evidence On An Episode of Geomagnetic Instability, Recorded in Middle Miocene Lava Flows in Northwest Icelandnorbi34Оценок пока нет
- Unsat 3Документ15 страницUnsat 3norbi34Оценок пока нет
- Bhattacharyya - Magnetic Anomalies Due To Prism Shaped Bodies With Arbitrary PolarizationДокумент15 страницBhattacharyya - Magnetic Anomalies Due To Prism Shaped Bodies With Arbitrary Polarizationnorbi34Оценок пока нет
- Constable - Occam Inversion To Generate Smooth 2D Models From MT DataДокумент12 страницConstable - Occam Inversion To Generate Smooth 2D Models From MT Datanorbi34Оценок пока нет
- Asfahani - Statistical Factor Analysis of Aerial Spectrometric DataДокумент13 страницAsfahani - Statistical Factor Analysis of Aerial Spectrometric Datanorbi34Оценок пока нет
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Ch.1 Essential Concepts: 1.1 What and How? What Is Heat Transfer?Документ151 страницаCh.1 Essential Concepts: 1.1 What and How? What Is Heat Transfer?samuel KwonОценок пока нет
- Activity 2Документ5 страницActivity 2DIOSAY, CHELZEYA A.Оценок пока нет
- Puratattva No 41Документ3 страницыPuratattva No 41ultimategoonОценок пока нет
- The Neuroscience of Helmholtz and The Theories of Johannes Muèller Part 2: Sensation and PerceptionДокумент22 страницыThe Neuroscience of Helmholtz and The Theories of Johannes Muèller Part 2: Sensation and PerceptionCrystal JenningsОценок пока нет
- Climatol GuideДокумент40 страницClimatol GuideFressiaОценок пока нет
- FoundationДокумент98 страницFoundationManognya KotaОценок пока нет
- Frequency Polygons pdf3Документ7 страницFrequency Polygons pdf3Nevine El shendidyОценок пока нет
- 09-11-2016 University Exam PaperДокумент34 страницы09-11-2016 University Exam PaperSirisha AsadiОценок пока нет
- Science, Technology and Society Module #1Документ13 страницScience, Technology and Society Module #1Brent Alfred Yongco67% (6)
- 8 Lesson 13 Viking FranceДокумент2 страницы8 Lesson 13 Viking Franceapi-332379661Оценок пока нет
- Astn/Ason and Gmpls Overview and Comparison: By, Kishore Kasi Udayashankar Kaveriappa Muddiyada KДокумент44 страницыAstn/Ason and Gmpls Overview and Comparison: By, Kishore Kasi Udayashankar Kaveriappa Muddiyada Ksrotenstein3114Оценок пока нет
- Integration Plan Grade 9 Mapeh SeptemberДокумент3 страницыIntegration Plan Grade 9 Mapeh Septemberbernie evaristo bacsaОценок пока нет
- Proposed Multimodal Terminal: Architect Rosauro H. Jamandri, M. ArchДокумент7 страницProposed Multimodal Terminal: Architect Rosauro H. Jamandri, M. Archpepito manalotoОценок пока нет
- Bearing TypesДокумент5 страницBearing TypesWayuОценок пока нет
- Sim Educ101Документ101 страницаSim Educ101Rolando AmadОценок пока нет
- Case Study III - MichelinДокумент15 страницCase Study III - MichelinfreitzОценок пока нет
- SHAW Superdew 3 Specification SheetДокумент3 страницыSHAW Superdew 3 Specification SheetGeetha ManoharОценок пока нет
- AnimDessin2 User Guide 01Документ2 страницыAnimDessin2 User Guide 01rendermanuser100% (1)
- Introduction To The Iceberg ModelДокумент5 страницIntroduction To The Iceberg ModelAbhay Tiwari100% (1)
- Curriculum Improvement v2Документ47 страницCurriculum Improvement v2Nica Lagrimas100% (1)
- 2SA1016Документ4 страницы2SA1016catalina maryОценок пока нет
- Demonstration of Preprocessing On Dataset Student - Arff Aim: This Experiment Illustrates Some of The Basic Data Preprocessing Operations That Can BeДокумент4 страницыDemonstration of Preprocessing On Dataset Student - Arff Aim: This Experiment Illustrates Some of The Basic Data Preprocessing Operations That Can BePavan Sankar KОценок пока нет
- Florida Motor Fuel Tax Relief Act of 2022Документ9 страницFlorida Motor Fuel Tax Relief Act of 2022ABC Action NewsОценок пока нет
- Power - Factor - Correction - LegrandДокумент24 страницыPower - Factor - Correction - LegrandrehanОценок пока нет
- Assistant Bookkeeper Resume Sample - Best Format - Great Sample ResumeДокумент4 страницыAssistant Bookkeeper Resume Sample - Best Format - Great Sample ResumedrustagiОценок пока нет
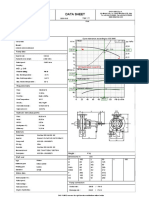
- Data Sheet: Item N°: Curve Tolerance According To ISO 9906Документ3 страницыData Sheet: Item N°: Curve Tolerance According To ISO 9906Aan AndianaОценок пока нет
- Handbook+for+Participants+ +GCC+TeenДокумент59 страницHandbook+for+Participants+ +GCC+Teenchloe.2021164Оценок пока нет
- Pursuit of Performance Findings From The 2014 Miller Heiman Sales Best Practices StudyДокумент37 страницPursuit of Performance Findings From The 2014 Miller Heiman Sales Best Practices StudyLoredanaОценок пока нет
- Video Tutorial: Machine Learning 17CS73Документ27 страницVideo Tutorial: Machine Learning 17CS73Mohammed Danish100% (2)
- R67068.0002 2 HB Profibus-Schnittstelle en KueblerДокумент42 страницыR67068.0002 2 HB Profibus-Schnittstelle en KueblerSabari StunnerОценок пока нет