Вам также может понравиться
- Sayon Dutta - Reinforcement Learning With TensorFlow - A Beginner's Guide To Designing Self-Learning Systems With TensorFlow and OpenAI Gym-Packt Publishing (2018)Документ327 страницSayon Dutta - Reinforcement Learning With TensorFlow - A Beginner's Guide To Designing Self-Learning Systems With TensorFlow and OpenAI Gym-Packt Publishing (2018)Akshit Bhalla100% (3)
- Niagara Framework Middleware SpecificationДокумент33 страницыNiagara Framework Middleware SpecificationSreekantharasah ThanujanОценок пока нет
- Aadhaar E-KYC BasicsДокумент9 страницAadhaar E-KYC Basicssandy_jadhaoОценок пока нет
- Dynamic Matchings in Convex Bipartite GraphsДокумент13 страницDynamic Matchings in Convex Bipartite GraphsHamzaОценок пока нет
- A Fully Locking Free Isogeometric Approach For Plane Linear Elasticity Problems A Stream Function FormulationДокумент13 страницA Fully Locking Free Isogeometric Approach For Plane Linear Elasticity Problems A Stream Function FormulationMojtaba MohebiniaОценок пока нет
- Deconvolution: A Wavelet Frame Approach: Received: Date / Revised Version: DateДокумент36 страницDeconvolution: A Wavelet Frame Approach: Received: Date / Revised Version: DatesahibhaiОценок пока нет
- CDSTR Ros 03 005 PDFДокумент16 страницCDSTR Ros 03 005 PDFShuubham OjhaОценок пока нет
- Inversion of Noise-Free Laplace Transforms: Towards A Standardized Set of Test ProblemsДокумент20 страницInversion of Noise-Free Laplace Transforms: Towards A Standardized Set of Test ProblemsAhmad PooladiОценок пока нет
- Experiments On The Minimum Linear Arrangement Problem: Jordi PetitДокумент29 страницExperiments On The Minimum Linear Arrangement Problem: Jordi PetitPhat LuongОценок пока нет
- Algorithms For Bound Constrained Quadratic Programming ProblemsДокумент24 страницыAlgorithms For Bound Constrained Quadratic Programming ProblemsasdfОценок пока нет
- LF Hybrid SolversДокумент15 страницLF Hybrid SolversJuan Carlos SalomОценок пока нет
- HP Finite Element Technology For: Mathematical and Computational Applications, Vol. 18, No. 3, Pp. 152-175, 2013Документ24 страницыHP Finite Element Technology For: Mathematical and Computational Applications, Vol. 18, No. 3, Pp. 152-175, 2013joojoo987654321Оценок пока нет
- Geometric Approaches: 1. What Is A Finite Precision Line?Документ10 страницGeometric Approaches: 1. What Is A Finite Precision Line?naru_saОценок пока нет
- The Gradient Projection Algorithm For Smooth Sets and Functions in Nonconvex CaseДокумент20 страницThe Gradient Projection Algorithm For Smooth Sets and Functions in Nonconvex CaseKelvin CoutoОценок пока нет
- Constraint ProgrammingДокумент37 страницConstraint ProgrammingRishabh ShrivasОценок пока нет
- A Dynamic Topological Sort Algorithm For Directed Acyclic GraphsДокумент24 страницыA Dynamic Topological Sort Algorithm For Directed Acyclic Graphsgallium.09.gleeОценок пока нет
- Constraints and AI PlanningДокумент29 страницConstraints and AI PlanningMahmoud NabilОценок пока нет
- A Solution Approach To Bilevel Linear Programming With Fuzzy CoefficientsДокумент4 страницыA Solution Approach To Bilevel Linear Programming With Fuzzy CoefficientsCESARPINEDAОценок пока нет
- Multilevel Quasiseparable Matrices in PDE-constrained OptimizationДокумент20 страницMultilevel Quasiseparable Matrices in PDE-constrained OptimizationAsya SobolevskayaОценок пока нет
- COMSOL Conf CardiffДокумент8 страницCOMSOL Conf CardiffLexin LiОценок пока нет
- Facility Layout PaperДокумент13 страницFacility Layout PaperAhmed El KadyОценок пока нет
- Overlapping Multi-Patch Structures in Isogeometric AnalysisДокумент43 страницыOverlapping Multi-Patch Structures in Isogeometric AnalysisJorge Luis Garcia ZuñigaОценок пока нет
- Diameter, Optimal Consensus, and Graph EigenvaluesДокумент10 страницDiameter, Optimal Consensus, and Graph EigenvaluesImelda RozaОценок пока нет
- Dynamic Programming For Graphs On Surfaces: Juanjo Ru E Ignasi Sau Dimitrios M. ThilikosДокумент26 страницDynamic Programming For Graphs On Surfaces: Juanjo Ru E Ignasi Sau Dimitrios M. ThilikosChitradeep Dutta RoyОценок пока нет
- Frank-Michael Schleif - Sparse Kernelized Vector Quantization With Local DependenciesДокумент8 страницFrank-Michael Schleif - Sparse Kernelized Vector Quantization With Local DependenciesTuhmaОценок пока нет
- Stairs 2002Документ10 страницStairs 2002dvd.hay12Оценок пока нет
- Figueiredo Et Al. - 2007 - Gradient Projection For Sparse Reconstruction Application To Compressed Sensing and Other Inverse Problems-AnnotatedДокумент12 страницFigueiredo Et Al. - 2007 - Gradient Projection For Sparse Reconstruction Application To Compressed Sensing and Other Inverse Problems-Annotatedyjang88Оценок пока нет
- Likhachev OptimalB-splineknotallocationinSEdataanalysis R13aДокумент29 страницLikhachev OptimalB-splineknotallocationinSEdataanalysis R13aSTI2D LSSNОценок пока нет
- Efg 1Документ41 страницаEfg 1malenenivamsiОценок пока нет
- Fitting Piecewise Linear Continuous FunctionsДокумент31 страницаFitting Piecewise Linear Continuous FunctionshongxinОценок пока нет
- Fast and Stable Least-Squares Approach For The Design of Linear Phase FIR FiltersДокумент9 страницFast and Stable Least-Squares Approach For The Design of Linear Phase FIR Filtersjoussef19Оценок пока нет
- ppsn6 PDFДокумент11 страницppsn6 PDFJohn PragasamОценок пока нет
- Effects of Mesh Motion On The Stability and ConverДокумент11 страницEffects of Mesh Motion On The Stability and Converhaythem.mejri.proОценок пока нет
- Local Do PDFДокумент11 страницLocal Do PDFluceritomontОценок пока нет
- Semidef ProgДокумент47 страницSemidef ProgSérgio MonteiroОценок пока нет
- Algorithm of GameДокумент6 страницAlgorithm of GameGilberto DavisОценок пока нет
- 4987 PDFДокумент8 страниц4987 PDFBeatriz BarbozaОценок пока нет
- Arroyo 2006Документ36 страницArroyo 2006Phuc HoОценок пока нет
- Matchings in Node-Weighted Convex Bipartite Graphs: INFORMS Journal On ComputingДокумент8 страницMatchings in Node-Weighted Convex Bipartite Graphs: INFORMS Journal On Computingarcwest1Оценок пока нет
- Optimal Ordering SchemesДокумент26 страницOptimal Ordering SchemesSubramaniam GnanasekaranОценок пока нет
- A Fixed-Outline Floorplanning Method Based On 2.5D: Sheqin Dong Qi XieДокумент6 страницA Fixed-Outline Floorplanning Method Based On 2.5D: Sheqin Dong Qi XieRaffi SkОценок пока нет
- Revista Brief Paper v3Документ6 страницRevista Brief Paper v3maximiliaoОценок пока нет
- 12278-Article (PDF) - 25733-1-10-20210113Документ36 страниц12278-Article (PDF) - 25733-1-10-20210113Florin MunteanОценок пока нет
- Multigrid Methods For Isogeometric DiscretizationДокумент13 страницMultigrid Methods For Isogeometric Discretizationtomar_skОценок пока нет
- Hitting Set Eps NetsДокумент14 страницHitting Set Eps NetsMELINA BELÉN JÁUREGUIОценок пока нет
- A Genetic-Based Framework For Solving (Multi-Criteria) Weighted Matching ProblemsДокумент25 страницA Genetic-Based Framework For Solving (Multi-Criteria) Weighted Matching ProblemsCESARPINEDAОценок пока нет
- Planar Graph Isomorphism Is in Log SpaceДокумент33 страницыPlanar Graph Isomorphism Is in Log Spacedddmadman001Оценок пока нет
- Weighted Residual Finite Element MethodДокумент27 страницWeighted Residual Finite Element MethodYaski SwathiОценок пока нет
- Constrained Optimal Fitting of Three-Dimensional Vector PatternsДокумент7 страницConstrained Optimal Fitting of Three-Dimensional Vector PatternsDaniele LugliОценок пока нет
- KolevVassil2009AMG (Curl)Документ23 страницыKolevVassil2009AMG (Curl)1017673438Оценок пока нет
- Thesis Proposal: Graph Structured Statistical Inference: James SharpnackДокумент20 страницThesis Proposal: Graph Structured Statistical Inference: James SharpnackaliОценок пока нет
- New Hardness Results For Planar Graph Problems in P and An Algorithm For Sparsest CutДокумент34 страницыNew Hardness Results For Planar Graph Problems in P and An Algorithm For Sparsest Cut71 46Оценок пока нет
- Analytic Functional BootstrapДокумент53 страницыAnalytic Functional BootstrapalexОценок пока нет
- Constrained Fitting of B-Spline Curves Based Onthe Force Density MethodДокумент7 страницConstrained Fitting of B-Spline Curves Based Onthe Force Density MethodBobОценок пока нет
- Content ServerДокумент27 страницContent ServerFelipe DazaОценок пока нет
- Mesh Grading in Isogeometric Analysis: Ulrich Langer, Angelos Mantzaflaris, Stephen Moore, Ioannis ToulopoulosДокумент26 страницMesh Grading in Isogeometric Analysis: Ulrich Langer, Angelos Mantzaflaris, Stephen Moore, Ioannis ToulopoulosJorge Luis Garcia ZuñigaОценок пока нет
- An Accelerated Gradient Method For Trace Norm MinimizationДокумент8 страницAn Accelerated Gradient Method For Trace Norm MinimizationVanidevi ManiОценок пока нет
- Convex Quadratic Programming For Object LocalizationДокумент4 страницыConvex Quadratic Programming For Object Localizationtamann2004Оценок пока нет
- Fixed-Radius Near NeighborsДокумент2 страницыFixed-Radius Near Neighborswatson191Оценок пока нет
- Calculus On GraphsДокумент63 страницыCalculus On Graphsaadas asdasdaОценок пока нет
- Computational Aspects of Modular Forms and Galois Representations: How One Can Compute in Polynomial Time the Value of Ramanujan's Tau at a Prime (AM-176)От EverandComputational Aspects of Modular Forms and Galois Representations: How One Can Compute in Polynomial Time the Value of Ramanujan's Tau at a Prime (AM-176)Оценок пока нет
- Wflo CpmipДокумент16 страницWflo CpmipvsukrishnaОценок пока нет
- Jrfqrorsample 2012Документ9 страницJrfqrorsample 2012vsukrishnaОценок пока нет
- 42782575Документ4 страницы42782575vsukrishnaОценок пока нет
- c1Документ25 страницc1vsukrishnaОценок пока нет
- Mtech Me Industrial EnggДокумент88 страницMtech Me Industrial EnggvsukrishnaОценок пока нет
- TA V25 Online HelpДокумент93 страницыTA V25 Online HelpvsukrishnaОценок пока нет
- Industrial 2008Документ101 страницаIndustrial 2008Mathew CherianОценок пока нет
- Simio Installation NotesДокумент4 страницыSimio Installation NotesvsukrishnaОценок пока нет
- AFC EnglishДокумент1 страницаAFC EnglishvsukrishnaОценок пока нет
- Rubrics For Program Outcomes AssessmentДокумент9 страницRubrics For Program Outcomes AssessmentvsukrishnaОценок пока нет
- Simio EULAДокумент5 страницSimio EULARogerQuispeОценок пока нет
- IBM SPSS ModelerДокумент5 страницIBM SPSS ModelervsukrishnaОценок пока нет
- Rubric SДокумент89 страницRubric SvsukrishnaОценок пока нет
- Chapter 03 SlidesДокумент70 страницChapter 03 SlidesvsukrishnaОценок пока нет
- Or 01Документ6 страницOr 01vsukrishnaОценок пока нет
- MEM361 Lecture1Документ9 страницMEM361 Lecture1vsukrishnaОценок пока нет
- Convex OptДокумент1 страницаConvex OptvsukrishnaОценок пока нет
- Or 01Документ6 страницOr 01vsukrishnaОценок пока нет
- CP 10Документ18 страницCP 10vsukrishnaОценок пока нет
- Real Time Linux Programming Mark VeltzerДокумент20 страницReal Time Linux Programming Mark VeltzerMark VeltzerОценок пока нет
- Error Pacth 4.0Документ4 страницыError Pacth 4.0IDewa Gede Raka Sutadarma0% (1)
- Final-Term Papers Solved Mcqs Cs501-Advance Computer ArchitectureДокумент29 страницFinal-Term Papers Solved Mcqs Cs501-Advance Computer Architecturehammad saeedОценок пока нет
- Circular ArraysДокумент7 страницCircular ArraysasuhylОценок пока нет
- Touchscreen and Zigbee Assistant in AirlinesДокумент80 страницTouchscreen and Zigbee Assistant in AirlinesnavyaОценок пока нет
- Constraint Satisfaction ProblemДокумент9 страницConstraint Satisfaction ProblemswapsjagОценок пока нет
- Compiler Design AssignmentsДокумент9 страницCompiler Design AssignmentsBuddhadeb SarkarОценок пока нет
- How To Query Apps ViewsДокумент4 страницыHow To Query Apps Viewsipin2Оценок пока нет
- Saphana ConversionДокумент3 страницыSaphana ConversionjeffagaduОценок пока нет
- DSP Board 130232 User ManualДокумент5 страницDSP Board 130232 User ManualDeborah VelazquezОценок пока нет
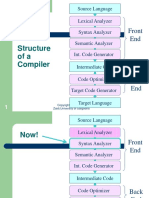
- Structure Ofa Compiler: Front EndДокумент95 страницStructure Ofa Compiler: Front EndHassan AliОценок пока нет
- Cucumber BDDДокумент46 страницCucumber BDDRahul JaiswalОценок пока нет
- Chapter 2 Instructions Language of The ComputerДокумент93 страницыChapter 2 Instructions Language of The ComputersonygabrielОценок пока нет
- Symbian OsДокумент32 страницыSymbian Osvipin_mogiliОценок пока нет
- Ble AlgorithmsДокумент2 страницыBle AlgorithmsKattya Enciso QuispeОценок пока нет
- Study of Unix & CommandsДокумент16 страницStudy of Unix & CommandsJameer Asif100% (1)
- C++ Proposed Exercises (Chapter 9: The C++ Programing Language, Fourth Edition)Документ2 страницыC++ Proposed Exercises (Chapter 9: The C++ Programing Language, Fourth Edition)Mauricio Bedoya100% (1)
- OpenModelicaUsersGuide PDFДокумент215 страницOpenModelicaUsersGuide PDFjakub_gramolОценок пока нет
- Transaction Processing-1Документ65 страницTransaction Processing-1Deepak JhaОценок пока нет
- Burst AllДокумент8 страницBurst AllStanley ZwillingОценок пока нет
- Inventory ManagementДокумент17 страницInventory ManagementAtekpe EshioОценок пока нет
- Python - UNIT 4 PDFДокумент110 страницPython - UNIT 4 PDFsupriya raj100% (1)
- The Quadratic Assignment ProblemДокумент71 страницаThe Quadratic Assignment Problemsri011Оценок пока нет
- CPP PolymorphismДокумент3 страницыCPP PolymorphismSuhailTomarОценок пока нет
- Verilog Prep MaterialДокумент11 страницVerilog Prep MaterialSangeetha BajanthriОценок пока нет
- Config Management RancidДокумент9 страницConfig Management RancidMohammad Sheraz KhanОценок пока нет