Академический Документы
Профессиональный Документы
Культура Документы
Three Lectures On Special Relativity
Загружено:
Chris RaymondИсходное описание:
Оригинальное название
Авторское право
Доступные форматы
Поделиться этим документом
Поделиться или встроить документ
Этот документ был вам полезен?
Это неприемлемый материал?
Пожаловаться на этот документАвторское право:
Доступные форматы
Three Lectures On Special Relativity
Загружено:
Chris RaymondАвторское право:
Доступные форматы
THREE LECTURES
ON SPECIAL RELATIVITY
Then God said, "Let there be
light," and there was light. And
God saw that the light was
good.
Genesis
And he made it the fastest thing in the Universe
By Taras Plakhotnik
School of Mathematics and Physics, The University of Queensland
Other learning resources on relativity
Wolfgang Rindler, Introduction to Special Relativity (Oxford University Press)
Wolfgang Rindler, Relativity : special, general, and cosmological
Hans Stephani, Relativity, (Cambridge University Press)
D.W. Hogg, Web notes on special relativity, http://cosmo.nyu.edu/hogg/sr/
W.S.C. Williams, Introduction to Special Relativity, (Taylor and Francis, 2002)
Michael Tsamparlis, Special Relativity (Springer, 2010) available as an electronic book from the
UQ library/
Three Lectures on Special Relativity by Taras Plakhotnik
2
GLOSSARY
Reference Frame is a space co-ordinate system and a set of clocks located at every
point of space. All these clocks are stationary in their reference frame (that is they have
permanent, time independent coordinates) and are synchronized with each other. The
time of an event is measured by the clock located at the same place as that of the event.
Other physical quantities (electrical field, magnetic field, charge density, etc) are always
explicitly or implicitly related to a reference frame when one specifies a point in the co-
ordinate space and the time reading (by the clock nearest to at that point) when a
particular quantity was determined. For example, electrical fields are frequently
described as a three-dimensional vector-function of four variables ( ) , , , x y z t E .
Inertial Reference Frame is a frame in which Newtons first law is valid. Strictly
speaking, rather abstract theoretical concepts. In practice, we expect that an object
which is far from all other objects is a good approximation for an origin of an inertial
reference frame. If an object moves with acceleration in a certain reference frame, we
search for force acting on that object and if the force can not be identified despite all the
efforts, we assume that the reference frame is not inertial. The canter of mass of our
nearest star is a very good approximation to the origin of an inertial reference frame.
Even a point stationary relative to the surface of our planet will do reasonably well in
many cases.
Observer is a fiction person introduced in textbooks to confuse the students. We will
use observer only if we are interested in actual visual impression which a real person
would receive if he/she were present at a certain location and at a certain time.
Rest Frame is a concept used to confuse those who are not yet confused. There is no
such thing as an absolute rest frame. But there is always a frame in which a selected
object is at rest. Such a frame is called co-moving frame (with the object selected).
Event has a more restricted meaning in physics than in conventional English. An event
occurs at a point in space (does not have any size) and at one instant of time. It can be
described by one set of co-ordinates (x, y, z, t) in a specified frame. Remember that time
is measured by the clock at the location of an event.
Simultaneous events are events which occur at the same time in a specified reference
frame.
Squared Interval is defined between any two events as
( ) ( ) ( ) ( )
2 2 2 2
2 2
12 2 1 2 1 2 1 2 1
s c t t x x y y z z . Note that the squared interval can
be negative.
Proper Time is a confusing name for the interval divided by the speed of light in
vacuum,
2
12
s c (note that this definition makes sense only if
2
12
0 s ). The proper
time coincides with time between two events measured in a certain reference frame if
the two events have the same space coordinates.
Length Contraction and Time Dilation are somewhat misleading concepts widely
used in textbooks. They simply represent two special cases of Lorentz transformations.
The distance between two events measured at the same time in some reference frame is
Three Lectures on Special Relativity by Taras Plakhotnik
3
shorter (by a factor of ) than the distance between these events in a reference frame
where they are not simultaneous (do not have the same time). The time between two
events at the same place is longer (by a factor of ) than the time between these events
in a reference frame where they are not at the same place (do not have the same space
coordinates). The concepts are misleading because they lead away from the complete
Lorentz transformations where time and position are interrelated (this relation is the
essence of Special Relativity).
Relative velocity is the velocity of one object relative to other. That is, velocity of
object A relative to object B is the velocity of object A in a reference frame co-moving
with object B (see Rest Frame).
Thought-experiment is not an experiment but a mental exercise designed to illustrate
the theoretical concepts for educational purposes. At most, such experiments can
demonstrate that the theory is not self contradictive but can not prove that the theory is
correct.
Three Lectures on Special Relativity by Taras Plakhotnik
4
Lecture 1
Concepts:
Events. Reference frame. Relativity postulates. Transformation of
coordinates. Galilean transformations. Deriving Lorentz
transformations. Invariance of the squared interval under Lorentz
transformations. Absolute past and absolute future.
Questions for consideration
How to measure a length of a moving rod?
Events and a reference frame
Physical events are described by four numbers which refer to a certain reference frame.
A reference frame is made of an infinite number of synchronized clocks covering the
whole space. Each clock has definitive and fixed coordinates (see Fig. 1). For every
event, three numbers ( ) , , x y z specify the space coordinates of the clock nearest to the
event (in theory the clock location coincides with the location of the event) and the
fourth number tells the time t shown by that clock. We will say that this event is
described by its four coordinated in reference frame O. The event coordinates are
( ) , , x y z and t respectively in reference frame O . The second reference frame is not
fundamentally different from the first frame but these two frames can move relative to
each other. Four coordinates of an event will be written in several ways such as
[ ] , , , x y z t , [ ]
1 2 3 4
, , , x x x x , or [ ]
1 2 3
, , , x x x t depending on the circumstances and
convenience.
Because the frame-forming clocks are distributed in space, some attention should be
paid to their synchronization. Only clocks located at the same location can be compared
directly. One way to synchronize two clocks is to move an exact replica of one clock to
the location of the second clock. This motion should be done with a very slow speed (in
theory a limit of zero speed should be taken which would require infinitely long time to
cover a finite distance) to avoid acceleration. Alternatively, a signal with a known
propagation velocity can be sent from one clock to the other when, for example, the
first clock shows zero time. When the pulse arrives to the second clock, the clock can
be set to the time / t L = , where L is the distance between the clocks. There is nothing
special about using a pulse of light for this purpose, except for light being able to
propagate in vacuum and that its speed in vacuum is known to high accuracy (actually
Three Lectures on Special Relativity by Taras Plakhotnik
5
this speed is used as an etalon in the modern metrology and therefore its value is known
exactly).
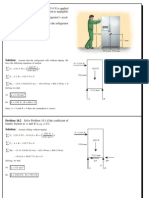
A concept useful for understanding the relativity is a world line shown in Fig. 2.
An object with a constant velocity will have a straight world line. The speed of the
particle equals cot . The angle theta determines the gradient of the curve as shown in
Fig. 2.
Relativity Principles
1. Absolute uniform motion (motion with a constant velocity) cannot be detected
(Galileo, Newton, etc).
In other words, all laws of mechanics (later extended to laws of physics) are identical in
all reference frames moving with a constant velocity relative to each other. An example
of such a law is Newtons First Law Every object will stay in uniform motion unless
an external force is applied. A body moving with a constant velocity in reference frame
O will move with a constant velocity in reference frame O if the O moves with a
constant velocity relative to O. O may have different orientation (directions of the
three axes) relative to O and a different location of its origin. But what is the reference
frame where the law holds? It holds in inertial reference frames. In fact, Newtons First
t
1
x
1
t
x
Figure 2. If at time
1
t the location of an
object is
1
x , this can be represented by a
point on the x-t plane. Motion of an object
is then represented by a curve which is
called a world line.
9
1
6
3
9
1
6
3
9
1
6
3
9
1
6
3
9
1
6
3 9
1
6
3
x
Figure 1. Infinite space-grid of identical clocks is set up in every
reference frame. These clocks are at rest and synchronized in the
corresponding reference frame. When an event happens, its space
coordinates and time are read from the coordinates of the nearest clock
and the time shown by that clock.
9
1
6
3
9
1
6
3
9
1
6
3
9
1
6
3
9
1
6
3
9
1
6
3
9
1
6
3
9
1
6
3
9
1
6
3
9
1
6
3
9
1
6
3 9
1
6
3
x
y
z
O
9
1
6
3
9
1
6
3
9
1
6
3
9
1
6
3
9
1
6
3
9
1
6
3
Three Lectures on Special Relativity by Taras Plakhotnik
6
Law postulates the existence of such a frame. From the above formulated principle it
follows that Newtons First Law also holds in a reference frame which moves uniformly
relative to a reference frame which is already proved to be inertial.
2. The speed of light in vacuum is the same in all reference frames (Einstein).
The historically first experiment verifying that the speed of light is independent of the
reference frame was performed by Michelson and Morley. They observed that the speed
of light relative to Earth is the same despite the orbital motion of the Earth and/or
different directions of light propagation. Modern particle accelerators are able to
accelerate particles to the velocities extremely close to the speed of light in vacuum.
Design of accelerators and the analysis of experimental results obtained with particles
colliding at high speeds rely on relativistic Newton's laws which are derived later in the
course. The constancy of the speed of light also follows from Maxwell equations and
the assumption that these equations are valid in all inertial reference frames.
Transformation of coordinates. Standard pair of reference frames
Apparently, there must be a relation between the sets of 4-coordinates in different
reference frames. We assume that there is a universal transformation describing how to
calculate the primed coordinates of an event given its not primed coordinates and the
relative velocity of the two frames.
Any straight world line remains a straight world line in any inertial reference frame
because if the velocity is constant in one inertial reference frame it is also constant (time
independent) in any other inertial reference frame. The only transformation of
coordinates which transforms a straight line into a straight line is a linear
transformation.
Conventionally for simplicity, the following conditions are assumed valid.
1) The primed reference frame moves in the x-direction with velocity u. 2) The
corresponding axes of the two reference frames are parallel to each other.
3) When the locations of the two origins O and O coincide in space, the two clocks
located at the origins of the two reference frames show zero time.
These two frames will be called a standard pair of the reference frames or simply
standard reference frames for briefness (see Fig. 1). Since the direction of the velocity
u is parallel to the x-axis, the velocity fully described just only one number u . The sign
of this number is positive if the velocity vector points in the direction from negative x to
positive x and negative if it points in the x-direction.
These conditions are not limitations of the theory which can be easily generalized to
arbitrary inertial reference frames.
Three Lectures on Special Relativity by Taras Plakhotnik
7
If the above conditions are not satisfied, one can use reference frames O and O
which are not moving relative to O and O respectively but which satisfy the above
conditions.
First, O and O are rotated in space relative to O and O respectively in such a way
that 1) the velocity u is parallel to x and x ; 2) y y 3) z z . Obviously, O
and O satisfy the conditions 1) and 2).
The space coordinates of O and O (and similar for O
and O ) are related through the ordinary Euclidian
geometry based expressions. A vector-matrix notation
can be used to write
x x
y y
, where
stands for
a rotation matrix. For example, in a two-dimensional
case shown in the figure below the relation between the
coordinates is derived as follows
( )
( )
cos cos cos sin sin cos sin
sin sin cos cos sin sin cos
x r r r x y
y r r r x y
= = + = +
= = = +
This can be written as
cos sin
sin cos
x x
y y
=
The time in reference frame O is synchronized with time in O. That is t t = . The time
in reference frame O can be set with an arbitrary shift t so that generally
t t t = + . But t can be chosen to satisfy the convention 3) above. That is the clock
at origin of O shows zero when space location of the origin coincides with the origin
of O .
For the rest of the course we will deal with the standard configuration of the reference
frames.
Lorentz transformations
For a pair of standards reference frames the transformation of y and z coordinates is
very simple y y = and z z = . It is not so for the x-coordinate and time.
In classical Newtonian mechanics, the relation between two events are given by
Galilean transformations
x
y
y
x
r
Three Lectures on Special Relativity by Taras Plakhotnik
8
t t
x x ut
=
It is easy to see that these transformations violate second Einsteins postulate: The
velocity of anything (including light) depends on the reference frame according to
Galilean velocity addition formula = u .
A general form for a linear transformation of x and t from O to O is
t x t
x x t
= +
= +
(1)
All four coefficients may be functions of velocity u , the velocity of O relative to O.
The world line of the origin of the primed reference frame is 0 x in the primed
reference frame and satisfies the equation x ut = in the not primed reference frame.
When these two equalities are substituted into the equation x x t = + , one gets
0 ut t = + (2)
Therefore we must have u = . Thus, only three parameters are left in the linear
relation (Eq. 1) and we are seeking a transformation in the form
( )
t x t
x x ut
= +
(3)
which is obtained from Eq (1) by substitution u = . These equations should
satisfy the Einsteins axioms.
The speed of light must be the same in all reference frames, therefore by substitution
( ) x x ut = and t x t = +
(i) world line x ct = should transform into world line x ct =
(ii) world line x ct = should transform into world line x ct = .
Substation of the expressions for x and t into x ct = and x ct = gives
( ) ( )
( ) ( )
x ut c x t
x ut c x t
= +
= +
(4)
respectively. By solving each of these equations for x one gets
Three Lectures on Special Relativity by Taras Plakhotnik
9
c u
x t
c
c u
x t
c
+
=
. (5)
The required linear dependencies x ct = and x ct = emerge only if
c u
c
c
c u
c
c
+
=
(6)
or in an equivalent form
2
2
c u c c
c u c c
+ =
= +
(7)
where by solving for and we obtain
2
u
c
=
(8)
Thus, the transformation from not primed to primed coordinates must be
( )
2
x x ut
u
t t x
c
| |
=
|
\
, (9)
where the only not yet determined parameter is . This transformation can be inverted
(to obtain transformation from primed to not primed reference frame) by solving
Equations (9) for x and t . We begin by solving the upper equation for x
1
x x ut
= + (10)
next, substitute this solution into the lower equation
2
2 2
1
u u
t t x
c c
| |
=
|
\
, (11)
solve it for t and then substitute the solution into Equation (10)
Three Lectures on Special Relativity by Taras Plakhotnik
10
( )
2 2
2
2 2
2 2 2
2 2 2
1
1
1 / 1
1 1 1
u
t t x
c u
c
u c ut
x x x x ut
u u u
c c c
| |
= +
|
| |
\
= + + = +
| | | | | |
| | |
\ \ \
(12)
Now we exploit the symmetry between the primed and not primed reference frames. We
use the fact that there is no difference between the primed and not primed reference
frame accept for the value of the relative velocity. Remember that the laws of physics
(and the Lorentz transformations is one of such laws) should be identical in all reference
frames. Therefore the transformations from x and t to x and t also can be obtained
from Eq. (9) by replacing u with u , the velocity of O relative to O .
( )( )
( )
2
x u x u t
u
t u t x
c
| |
=
|
\
(13)
The agreement between Eq. (13) and Eq. (12) appears only if
( )
( )
( )
( )
2
2
2
2
1
1
1
u
u
u
c
u
u u
u
u
c
| |
| |
|
\
(14)
Therefore
( ) ( )
2
2
1
u u
u
u u
c
=
| |
=
|
\
Thus, the transformation relating 4-coordinates of the same event when described in two
reference frames reads
x
u
A)
B)
Drawing A) can be obtained from B) by flipping left and right.
Because there is no physical different between left and right,
Lorentz transformation should not change if x is replaced by x
and u is replaced by u . Therefore ( ) u must be equal to ( ) u .
x
Three Lectures on Special Relativity by Taras Plakhotnik
11
( )
1/ 2
2
2
1/ 2
2
2 2
1
1
u
x x ut
c
u u
t t x
c c
| |
=
|
\
| |
| |
=
| |
\
\
(15)
and is called Lorentz transformation.
Transformation of a particles trajectory to a different RF
If a trajectory is given by equations
( )
( )
x g t
y f t
=
=
,
where ( ) g t and ( ) f t are arbitrary functions of time (of course there is a limit for
velocity which a physical particle can have and therefore
2 2
2
dg df
c
dt dt
| | | |
+
| |
\ \
should hold) we can transform these trajectories to a primed reference frame.
Because Lorentz transformations from not primed frame to primed frame
(standard configuration) are
( )
2
x x ut
y y
u
t t x
c
= +
=
| |
= +
|
\
we can substitute these relations into trajectory equations
( )
2
2
u
x ut g t x
c
u
y f t x
c
| | | |
+ = +
| |
\ \
| | | |
= +
| |
\ \
It may be possible to solve the top equation for x and get ( ) x G t = , where ( ) G t
is a function of time in the primed reference frame. This function can be
substituted into the equation for y . Thus one gets
( )
( )
2
x G t
u
y f t G t
c
=
| | | |
= +
| |
\ \
,
the trajectory of the same particle in the primed reference frame.
Properties of Lorentz transformations
Three Lectures on Special Relativity by Taras Plakhotnik
12
1. Non relativistic limit. If the speed of light is formally set to infinity, the Lorentz
transformations are equivalent to the Galilean transformations. It is a good idea to look
at the limit c in any relativistic problem to make sure that the solution converges
to the non relativistic Newtonian mechanics.
2. Interval. Let us calculate in different reference frames the value of
( ) ( ) ( ) ( )
2 2 2 2
2 2 2
12 2 1 2 1
s c t t x x c t x , where the subscripts refer to two events.
In a primed reference frame the value of
( )
2
2
2 2 2 2 2 2 2
12 2
2 2 2 2
2
u
s c t x c t x x u t
c
c t u t x
| |
= =
|
\
+
2
2 2 2 2 2
2
2
u
x x u t x
c
+
( )
2 2 2
2
2 2 2 2 2 2 2 2 2 2
12 2
1
u t
u
c u t x c t x s
c
=
| |
=
|
\
(16)
The quantity
2
12
s is the same in all reference frames for any two events. This
number is called a squared interval
Generally, in 3D space the squared interval is defined by
2 2 2 2 2 2
12 12 12 12 12
s c t x y z (17)
It is also true in 3D that the squared interval does not change (it is an invariant) under
Lorentz transformations.
If a squared interval is lager than zero, it is called time-like. If a squared interval is
smaller than zero, it is called space-like.
Note 1: Distance between events is invariant under rotation of the space coordinates but
is not invariant under Lorentz transformation.
Absolute past and absolute future
The value of
2
12
s as defined above can have any sign (do not be confused by the
superscript 2). Because
2
12
s is an invariant (does not depend on the reference frame), the
sign of
2
12
s is the same in all reference frames. This sign is very important because it
Three Lectures on Special Relativity by Taras Plakhotnik
13
tells a lot about possible relations between the two events for which the squared interval
is calculated.
1. When
2
12
0 s > , the chronological order of the two events is absolute, it is the same in
all reference frames. Such two events are said to have timelike separation or simply are
called timelike events.
Note that when c is infinitely large (that is when Newtons mechanics is valid) this
inequality always holds and therefore all events are timelike.
Prove. The Lorentz transformation for time separation between two events is
2 1 2
u
t t t t x
c
| |
=
|
\
(18)
If the squared interval is larger than zero, then
2 2 2
c t x t x c > > and therefore
2
u
t x
c
> (19)
as long as u c < . The latest inequality holds for any physically allowed reference frame
and hence as follows from Eqs. (18) and (19) the sign of t coincides with the sign of
t .
In other words, if
2 1
t t > , then
2 1
t t > and if
2 1
t t < , then
2 1
t t < .
The locations of two timelike events can always be made identical by choosing an
appropriate reference frame. ( )
2 1
x x x x u t = is zero if x u t = , that is if
x
u
t
(20)
Because u c < for a physically allowed reference frame, the equality can be achieved
only if
2 2 2
0 c x t c t x > > . That is when the squared interval is larger than
zero.
Three Lectures on Special Relativity by Taras Plakhotnik
14
2. When
2
12
0 s < , the chronological order of the two events depends on the reference
frame. Such two events are said to have spacelike separation or simply called spacelike
events. These events can not be considered as being a physical cause/consequence of
each other because such relation should not depend on the reference frame (logically the
cause can not follow the consequence).
For example, two spacelike events can be made simultaneous because by choosing an
appropriate primed reference frame we can get
2
0
u
t t x
c
| |
= =
|
\
. (21)
This can be achieved if the primed reference frame is moving with velocity
2
t
u c
x
(22)
And if
2 2 2
0 1 c t x c t x < < , the required speed is physically allowed
(
x
u c
t
<
).
Final remarks for Lecture 1
In this Lecture Notes we do not talk about time dilation and length contraction, the
central topics of many elementary text books. Actually, the best advice I can give you is
to avoid such terminology. A typical statement which can be seen here and there time
runs slower in a mowing reference frame is quite misleading. Time does not do it! If
taken seriously and/or without an explanation, such a statement is logically absurd. You
have to make sense of time being slower in the primed frame than in the not primed
frame (because the primed is moving relative to the not primed) and at the same time
being slower in the not primed framed because it is moving relative to the primed. But
the theory is built on logic. Is this the instance when impossibility of understanding the
theory is revealed? I do not think so!
The SR theory interconnects time and x,y,z coordinated in a single dimensional space.
In other (in a bit simpler) words time in the primed frame (for example) is expressed as
a linear combination of x coordinate and time in the not primed frame. Consider a pair
of events 1 and 2 such that their location is the same in the primed frame. That is
1,2
0 x = . Then
1,2 1,2 1,2 1,2 2
u
t t x t
c
| |
= + =
|
\
Three Lectures on Special Relativity by Taras Plakhotnik
15
Because 1 > we conclude that
1,2 1,2
t t > . So indeed, the time interval is smaller in
the primed frame and one may say that the time runs slower in the primed frame.
However, take two events (3 and 4) such that they are at the same location in the not
primed frame (
3,4
0 x = ). Then
3,4 3,4 3,4 3,4 2
u
t t x t
c
| |
= =
|
\
.
The is on the wrong side!
Thus, for some events the time interval is shorter in the primed frame and for some
other the time interval is shorter in not primed frame. Is this a surprise? No!
Look at an example of ordinary linear transformation (rotation) of two space frames.
For point A,
A A
x x > but for point B
B B
x x < . Very few people have ever complained or
have called it a paradox.
Same problem can be seen with the length contraction. Just consider two events which
happen at the same time in the primed frame and then in another pair of events that are
at the same time in the primed frame.
x
y
y
x
A
B
Three Lectures on Special Relativity by Taras Plakhotnik
16
Lecture 2
Concepts:
Vectors. Vectors in Euclidian space. Scalar product in Minkovski
space. Proper time. 4-velocity. Quotient rule. 4-Wave-vector.
Doppler effect. Aberration effect. Transformation of the phase
velocity.
A geometrical concept of a vector is useful because any relations between vectors are
frame invariant. These relations hold after any allowed transformation of coordinates.
For example, + = a b c holds after any 3D rotation or after translation in space.
Vectors
Generally, vectors are geometrical objects which can be added to each other and can be
multiplied by a number. Given a coordinate system (base vectors), each N-dimensional
vector is identified by its n components. For example, a 2-dimentional vector
[ ]
1 2
, a a a
. These numbers can be transformed to a different coordinate system (a
different set of base vectors) according to the transformation defined by N relations for
each m
1
N
m mn n
n
a p a
=
=
, (23)
where
2
N numbers
mn
p are the same for all vectors (but depend on the choice of the
coordinate systems involved in the transformation). There must be one to one
correspondence between [ ]
1 2
, ,...,
N
a a a and [ ]
1 2
, ,...,
N
a a a therefore ( ) det 0
mn
p must
hold to ensure that the linear equations (27) can be solved for
n
a .
Addition of two vectors and multiplication of a vector by a number reads in coordinate
representation as
a
Figure 3. An example of two
vectors a and b which are
geometrically added to
produce vector c .
Three Lectures on Special Relativity by Taras Plakhotnik
17
[ ]
1 1 2 2
, ,...,
N N
a b a b a b = + + + + c a b c
(24)
and
[ ]
1 2
, ,...,
N
c c c c
(25)
Vectors in Euclidian space
Under certain transformations of the coordinate system such as rotation, translation, and
their combinations, the following quantity
2
2 2 2
1 2
...
N
a a a + + + a
(26)
does not change. Such a quantity is said to be invariant. The particular quantity defined
by Eq. (26) is called a length and is a not negative number. In a space where the axioms
and postulates of Euclidean geometry apply,
2 2 2
1 2
...
N
a a a + + + is an invariant. The
space is called an Euclidian vector space.
Scalar- or dot-product
Because
( ) ( ) ( )
( )
2
2 2 2
1 1 2 2
2
2
1 1 2 2
...
2 ...
N N
N N
a b a b a b
a b a b a b
+ = + + + + + +
= + + + + +
a b
a b
(27)
and
2
2
, a b
2
+ a b
are invariant under rotations, translations and their combinations,
1 1 2 2
...
N N
a b a b a b + + + should be also invariant under these transformations. An invariant
which can be defined for any two vectors is called a scalar product. In Euclidian space
the scalar product is therefore defined as
1 1 2 2
....
N N
a b a b a b + + + a b
(28)
This scalar product has obvious properties:
= c a a c
(29)
( )
+ = + a b c a c b c
(30)
( )
= a b a b
(31)
Three Lectures on Special Relativity by Taras Plakhotnik
18
Note that the definition of the scalar product depends on the transformation of the
coordinates. Not every transformation preserves length as defined by
2
2 2 2
1 1
...
N
a a a + + + a
.
Examples of vectors are Newtonian momentum, velocity, acceleration, and force,
electrical field, etc. These will be called 3-vectors because they are 3-dimentional and
their scalar products are defined by Eq. (28).
Definition of 4-vectors in Minkovski space
In Minkovski space the coordinates are transformed according to Lorentz
transformations. In these lectures we will use low-case letters for vectors in Euclidian
space. Capital letters will label 4-vectors in Minkovski space (or, for brevity, simply 4-
vectors). This convention will help avoid possible confusions.
A 4-verctor
[ ]
1 2 3 4
, , , A A A A A
can be transformed to a primed reference frame
according to
1 1 4
2 2 3 3
4 4 1
;
u
A A A
c
A A A A
u
A A A
c
| |
=
|
\
= =
| |
=
|
\
(32)
These transformation are identical to the derived above Lorentz transformations if we
set
1
A x = ,
2
A y = ,
3
A z = , and
4
A ct = .
Minkovski space allows also ordinary 3-diminsional rotations of the first three
components of a 4-vector but we will not consider it here for simplicity. When rotations
are excluded, the transformation matrix is then given by
[ ]
0 0
0 1 0 0
0 0 1 0
0 0
mn
u c
p
u c
=
(33)
Note: Sometimes (when convenient) we will use for 4-vectors the notation
[ ]
1 2 3 4
, , , , , ,
x y z t
A A A A A A A A
A
A quantity
Three Lectures on Special Relativity by Taras Plakhotnik
19
2
2 2 2 2
t x y z
A A A A A
(34)
is invariant under Lorentz transformation because it is simply the squared interval
considered previously. Therefore a scalar product of two 4-vectors is defined as
t t x x y y z z
A B A B A B A B A B
(35)
because, as required, it is an invariant under Lorentz transformations.
= A B A B
(36)
Some of the properties of such scalar products are identical to the properties of ordinary
scalar products in Euclidian space
( ) ( ) ( )
= = A B A B A B
(37)
( )
+ = + A B C A B A C
(38)
= A B B A
(39)
Example of a 4-verctor is a displacement between two events
[ ]
12 12 12 12
, , , x y z c t R
(40)
Other examples of 4-vectors can be obtained using properties of the Lorentz
transformations and will be considered below and in the following lectures. But first we
introduce a new scalar in Minkowski space, a proper time.
Proper time (a frame independent scalar expressed in seconds)
A proper time
12
between two timelike events is defined by the relation
2
12
12
s
c
(41)
The sign in the above equation equals the sign of
12
t .
1. Obviously, the proper time is an invariant under Lorentz transformations. The
squared interval is not negative and therefore the proper time is a real number and has a
direct physical meaning.
Three Lectures on Special Relativity by Taras Plakhotnik
20
2. Proper time equals the time interval between two events if they take place at the same
location. Indeed, for two events at the same location
2 2 2
0 x y z + + = . Therefore
( )
2 2 2 2
2
2 2 12
12 2 2
s x y z
t t
c c
+ +
= . (42)
This simple result let us define the proper time also as a time interval shown by a clock
at rest (in this case, two readings of the clock are the two events taking place at the same
location, the location of the clock)
3. In different reference frame the time intervals between two events are related by
Lorentz transformation
( )
2
/ t t u x c = (43)
But if t is the time measured in a reference frame where the two events are located at
the same place (that is, t is the proper time between the two events) then t = ,
0 x = and therefore
t = (44)
Note that is always shorter than t (since 1 ). This result sometimes is stated
saying that a moving clock appears to run slower. When two times (say 1 pm and 2
pm) are displayed by the moving clock, the time interval between these two events as
read from the clocks of the reference frame which is used to describe the moving clock
trajectory (apparently two clocks are required to do this because the clocks are not
moving in their own reference frame) will be longer.
4-Velocity (a new example of a 4-vector)
Because the proper time is an invariant, any 4-vector between can be divided by the
proper time (which is a real number for time-like events) and the result will be a 4-
vector (it will be transformed as prescribed by the Lorentz transformation). If the
displacement 4-vector is divided by the proper time, the result is called 4-velocity. The
first three components of the 4-velocity can be related to the ordinary velocity which
we will call 3-velocity
Three Lectures on Special Relativity by Taras Plakhotnik
21
4-Velocity of a particle
4-Velocity of a particle is defined as
[ ] [ ]
, , , , , , ( ) , , ,
x y z
d d dt
x y z ct x y z ct c
d dt d
= =
V
(45)
The factor equals the ratio dt d as derived in the Figure caption to Fig. 4. Note that
( ) ( )
1/ 2
2 2
1 / c
. The part , ,
x y z
represents ordinary 3D velocity, that is, for
example, /
x
dx dt = etc.
Because d is a scalar and [ ] , , , d x y z ct is a 4-vector, the ratio [ ] , , , d x y z ct d is a 4-
vector too unlike [ ] , , , d x y z ct dt which is not a 4-vector because dt is not a scalar (it
changes if we change the reference frame!).
The four components of the 4-velocity obey (as any other 4-vector) Lorentz
transformations when the reference-frame changes.
( )
( )
1 1 4
2 2
3 3
4 4 1
/ ;
;
;
/
V V u cV
V V
V V
V V u cV
=
=
=
=
(46)
Note that in these equations ( ) ( )
1/ 2
2 2
1 / u u c
= . Equations (46) are identical to
Eq. (36) which should hold for any 4-vector.
The squared 4-velocity of a particle should be a scalar which does not change under
Lorentz transformations. Indeed
Figure 4. A particle is moving along its world line.
The proper time between two events -- [ ] , x t and
[ ] , x dx t dt + + is (one space-dimension case)
2
2 2
2
2 2 2
1 1
dx
dx dt
d dt dt dt
c c c
| |
|
\
= = =
This also holds in three dimensions.
2
2 2
2
2 2 2
1 1
dr
dr dt
d dt dt dt
c c c
| |
|
\
= = = ,
where
2 2 2 2
dr dx dy dz = + +
x
t
Three Lectures on Special Relativity by Taras Plakhotnik
22
2 2 2 2
2 2 2 2 2 2
4 1 2 3 2 2
1 /
x y z
c
V V V V c
c
= =
(47)
Note. If two or more particles are present, each of them will have a 4-velocity. One can
add these 4-vectors and obtain another 4-vector. For example, for two particles, a and b
a b
+ V V V
. However, the square of this new 4-vector
is not equal to
2
c .
( )
2
2 2 2 2
2 2 2
a b a a b b a b
c
= + = + + = + V V V V V V V V V
. The last term depends on the
speed of one particle relative to the other (that is the speed of particle a in a reference
frame where particle b is at rest). If the relative speed is zero, one gets
2 2
4c
= V
(to see
this immediately consider a RF where both particles are at rest).
The relation between the 4-velocity and the 3-velocity can be obtained from Eq. (45).
For example, for the first three coordinates of the 4-velocity one gets
[ ] ( )[ ]
1 2 3 1 2 3
, , , , V V V = and for the fourth component ( )
4
V c = . Using these
relations, the Lorentz transformations (46) read
( ) ( ) ( )
( )
1 1 1
2 2
3 3
1
( ) ( ) ( ) ( ) ;
( ) ( ) ;
( ) ( ) ;
( ) ( ) ( ) /
u
u c u u
c
c u c u c
| |
= =
|
\
=
=
=
(48)
We can solve the first 3 equations for the coordinates of to get transformations for
components of 3-velocity
( )
1 1
3 2
2 3
( ) ( )
( )
( ) ( ) ( ) ( )
;
( ) ( ) ( ) ( )
u
u
u u
u
=
= =
(49)
A useful equality
2
1
( ) ( ) 1
( ) 1 /
u
u c
=
(50)
can be obtained from the transformation of
4
V . The finial result for the relativistic
transformation of 3-velocity reads
Three Lectures on Special Relativity by Taras Plakhotnik
23
1
1 2
1
3 2
2 3 2 2
1 1
1 /
1 1
;
1 / ( ) 1 / ( )
u
u c
u c u u c u
= =
(51)
Note. Transformation of the 3-velocity can be obtained directly from the Lorentz
transformations. The result, of course is the same as in Eq. (51). For example,
( ) ( ) dx u dx udt =
( )
u
dt u dt dx
c
| |
=
|
\
We divide the top equation by the bottom one to get
( )( )
( )
1 1
x
x
dx
u
u dx udt u dx dx udt
dt
u u dx u u dt
dt dx u dt dx
c c dt c c
= = = =
| |
|
\
Quotient rule
This rule helps identifying (based on physical arguments) some of the quantities as
being 4-vectors.
Theorem. If for any 4-vector A
in Minkovski space
4 4 1 1 2 2 3 3
A Y AY A Y AY (52)
is invariant (independent on the choice of the coordinate system), then [ ]
1 2 3 4
, , , Y Y Y Y Y
is a 4-vector.
Proof:
When the coordinates are transformed,
m
A is replaced by
4
1
mn n
n
p A
=
and
m
Y is replaced
by
m
Y (we do not know yet how
m
Y and
m
Y are related). Because
4 4 1 1 2 2 3 3
A Y AY A Y AY is an invariant, the following equality
4 4 4 4
1 1 2 2 3 3 4 4
1 1 1 1
1 1 2 2 3 3 4 4
n n n n n n n n
n n n n
p A Y p A Y p A Y p A Y
AY A Y AY A Y
= = = =
+ =
= +
, (53)
where matrix [ ]
mn
p is defined in Eq. (33) holds for any choice of A. Therefore the
system of equations
Three Lectures on Special Relativity by Taras Plakhotnik
24
11 1 21 2 31 3 41 4 1
12 1 22 2 32 3 42 4 2
13 1 23 2 33 3 43 4 3
14 1 24 2 34 3 44 4 4
p Y p Y p Y p Y Y
p Y p Y p Y p Y Y
p Y p Y p Y p Y Y
p Y p Y p Y p Y Y
+ =
+ =
+ =
+ =
(54)
must be satisfied (the coefficients in front of
1
A ,
2
A ,
3
A , and
4
A should be equal on the
right and left hand sides). Because ( ) det 0
mn
p , this system of linear equations for
{ }
n
Y has only one solution. But we know that if
4
1
n nm m
m
Y p Y
=
=
that is if the { }
n
Y is
transformed as a 4-vector, then the equations are satisfied. Since there is no other
solution, the transformation of Y-numbers to a new reference frame is given by
4
1
n nm m
m
Y p Y
=
=
. Therefore { }
n
Y is a 4-vector.
Now we can use the rule and physical arguments to generate a new 4-vector.
4 - Wave vector
Note that in some books is denoted by . To obtain the same equations as in such
books, cos and sin should be replaced by cos and sin in the following
expressions.
Propagation of a plain wave is described by the equation
( )
0
sin F F t = k r
, where
F is any quantity (pressure/displacement for sound waves or electric/magnetic fields
for radio waves and light etc) and r
is a radius-vector that is the displacement vector
from the origin of the coordinates to the point where the wave is observed. The phase
velocity of the wave is defined as / k = .
In an experiment, a recorder (filled box in the Figure) measures oscillating variable F
related to the propagating wave and displays the number of detected maxima on its
display. This experiment can be described using any inertial reference frame. The phase,
that is t k r
should have the same value in all these frames because its change
(divided by 2 tells how many maxima have been recorded by the recorder. This
x
y
y
k
x
k
u
Figure 4. A plane wave propagates
in the direction determined by its
wave-vector k
. The angle is the
polar angle of wave vector k
defined relative to x-axis as shown in
the figure to the left. With such a
definition of the angle one gets
cos
x
k k = and sin
y
k k = .
r
Three Lectures on Special Relativity by Taras Plakhotnik
25
outcome of the experiment (counting the maxima) should not depend on the choice of
the reference frame. It is too uncomfortable to thinks that the displayed number of
maxima is different in a reference frame where the box is at rest and in a reference
frame moving relatively to the box. Therefore the following equality must hold
x x y y z z x x x y y z z
t k r k r k r t k r k r k r = (55)
In other words
x x y y z z
ct k r k r k r
c
(56)
is Lorentz invariant. Therefore (see the quotient rule and note that , , ,
x y z
r r r ct
is a 4-
vector)
,
c
K k
(57)
is a 4-wave vector and must be transformed according to the following Lorentz
transformations. Thus, the invariance of the phase requires the following relation
between the values of k and expressed in different inertial reference frames.
( )
2
; ; ;
x x y y z z x
u
k k k k k k uk
c
| |
= = = =
|
\
(58)
Note that 0 = K K
for EM waves in vacuum.
Doppler Effect
The transformation of the fourth component of the 4-wave vector reads
x
u
k
c c c
| |
=
|
\
(59)
and given that / k = and cos
x
k k = one gets transformation of the angular
frequency
1 cos
u
| |
=
|
\
(60)
This is a Doppler frequency shift which can be observed for any wave. For EM waves
in vacuum,
1 cos
u
c
| |
=
|
\
. (61)
Three Lectures on Special Relativity by Taras Plakhotnik
26
The Doppler shift is not necessarily a relativistic effect. The difference between the non
relativistic Doppler shift and relativistic one is the factor gamma in the above
expression. Because of this factor, the relativistic Doppler shift is also present if
equals 90 degree (called transverse Doppler shift). Transverse Doppler shift has been
observed experimentally for atoms in motion using precise spectroscopy. The transverse
Doppler shift is a relativistic effect and is a manifestation of the slowed down time in a
moving reference frame.
If the frequency is known in one reference frame, the Doppler shift can be used to
measure the velocity of any other reference frame (where the same wave is detectable)
relative to the first one. For example, for a simple case when cos 1 = (this is when
the wave propagates in the direction of negative x, opposite to the velocity of the primed
reference frame which move in the direction of positive x) and the wave is an EM wave
in vacuum, one gets
1/ 2
1 /
1
1 /
u u c
c u c
+ | | | |
= + =
| |
\ \
(62)
The Doppler Effect can be used to determine the velocity u if the ratio of two
frequencies is known because Eq. (62) can be solved for u.
Aberration effect
The change in the direction of the wave vector is call aberration effect. Because the
direction of the wave-vector is determined by the value of the polar angle , aberration
effect can be described in terms of this angle.
For any wave (this treatment is valid for any wave not only light),
2 2
sin sin
cos cos
y y
x x
k k k k
u u
k k k k k
c c
= =
| | | |
= =
| |
\ \
.
Dividing the upper equations by the lower equations, one gets the direction of the wave
vector in the primed reference frame.
2 2
sin sin
tan
cos cos
y
x
k
k
u u k
k k
c c
= = =
| | | |
| |
\ \
(63)
Other functions of the primed angle are easy to derive.
Three Lectures on Special Relativity by Taras Plakhotnik
27
sin
sin sin
sin
1 cos
y
k
u k
= = = =
| |
|
\
(64)
2
2
cos
cos
cos
1 cos
x
u
u
k c
c
u
k
| |
\
= = =
(65)
In Eqs. (65, 64) previously derived / is used (see Eq. (60)).
This is a general result applicable to any kind of wave.
Useful relations for EM waves in vacuum
For EM waves in vacuum c =
( )
sin
tan
cos / u c
(66)
sin
sin
1 cos
u
c
=
| |
|
\
(67)
cos
cos
1 cos
u
c
u
c
(68)
1 /
tan tan
2 1 / 2
u c
u c
+
=
(69)
To derive the last one, you need the identity
2 2 2
2sin cos 2sin cos
sin
2 2 2 2
tan
1 cos 2
1 cos sin 2cos
2 2 2
= = =
+
+
(70)
The details of the derivation are below
Three Lectures on Special Relativity by Taras Plakhotnik
28
( )
2
2
2
2
sin
1 cos
sin sin
tan 1
2 1 cos
cos 1 cos cos
1
1 cos
sin 1 / sin 1 /
1 tan
1 / 1 cos 1 / 2
1 1 cos
u
u c
u u u
c
c c c
u
c
u u c u c
u c u c u c
c
| |
|
\
= = = =
+
+
+
+ +
= = =
+ | |
+
|
\
Note. The definition of the angels is some times confusing. If in doubts, write down
transformations for the components of the 4-wavevector and then get the angles from
the change of the 3-wavevector direction.
Phase velocity transformation
Of course, there is also relation between the phase velocities of the same wave in two
reference frames. The magnitude of the phase velocity equals k . This transformation
is easier to get if you recall that K K
is an invariant. Therefore
2 2 2 2
c c
| | | | | | | |
=
| | | |
\ \ \ \
(71)
where we have used the equality
2 2 2
/ k = . We substitute into the above equation the
expression for the frequency transformation
2 2
2 2
1 cos 1 cos
u u
c c
| | | | | | | |
| | | |
| | | |
\ \
| |
=
| |
| | \ \
| |
\ \
(72)
( )
( )( )
( )
2
2 2
2 2 2 2 2
2 2
1 1 /
1 /
1 1
cos
1 cos
c
u c
c u c
c
u u
| |
| |
|
|
|
\
| |
\
= + = +
|
\ | |
|
\
and solve it for the phase velocity in the primed reference frame
Three Lectures on Special Relativity by Taras Plakhotnik
29
( )
( ) ( )
2 2 2
2
2 2 2 2
4 2 2
2
cos
cos
1 2 cos sin
cos 1
u c
u
u u u u
u c
c c c c
= = =
| |
+
+
|
\
2
2 2 2
2
2 4 2
cos
1 cos sin
u
u u u
c c c
=
| |
| |
+
| |
\
\
(73)
For example, if cos 1 = and therefore sin 0 = then
( )
2
2
2 1 /
1 /
u u
u c
u c
+
= =
For EM waves in vacuum Eq. (72) reduces to
( )
( )
2
2 2 2
cos
cos
c u c
c
c u c c
= =
+
(74)
This is not a surprising result since the whole theory is based on the invariance of the
speed of light.
Note that there are three velocities related to the wave propagation problem in different
reference frames.
Final remarks
There are three velocities related to the 4-wavevector problem.
1. Speed of light. This is a fundamental physical constant conventionally labelled by c .
2. Relative velocity of reference frames labelled by u
3. Phase velocity of a wave. This is denoted as . The relation between , , and k is
/ k = . The 4-wavevector is
[ ]
1 2 3 4
, , , , , , /
x y z
K K K K k k k c
K for all waves.
For electromagnetic waves in vacuum / k c = and therefore , , ,
x y z
k k k k
K .
For all waves (not only EM waves)
1 1 4
2 2 3 3
4 4 1
;
u
K K K
c
K K K K
u
K K K
c
| |
=
|
\
= =
| |
=
|
\
Three Lectures on Special Relativity by Taras Plakhotnik
30
To use the equations in this Lecture where angles are involved, you have to determine
correctly angle . This is the polar angle of the 3D wave vector in the corresponding
reference frame. The wave vector points in the direction where the wave propagates not
in the direction to the source of the wave. Aberration effect, Doppler etc have nothing
to do with the source! First, you draw the x and x -axes. x and x point in the same
direction. The direction of these axes should be parallel to the direction of u
. In the
above equations u is positive if u
points in the direction of increasing x . If u
points in
the direction opposite to the direction of x , the value of u is negative. Then you
identify the angler as shown below and use your favourite equation.
My favourite for EM waves in vacuum:
1 /
tan tan
2 1 / 2
u c
u c
+
=
For the Doppler effect
2 2
1 cos
1 /
u
u c
(all waves).
x
k
x
k
Three Lectures on Special Relativity by Taras Plakhotnik
31
Lecture 3
Concepts:
4-momentum. Conservation of 4-momentum. Relativistic
3-momentum. Total energy. 4-acceleration. 4-force.
Transformation of magnetic and electrical fields.
4-momentum
By the analogy with Newtonian mechanics, 4-momentum of a particle is defined as a
product of its mass and its 4-velocity
[ ]
2 2
, , , ,
1 /
x y z
m
m m mc c
c
= =
P V
(75)
In these lectures m is a frame independent intrinsic property of a particle, sometimes
also called the rest mass of a particle. Note that in some textbooks the rest mass is
labelled as
0
m and
0
m m is called relativistic mass. The concept of "relativistic
mass" creates more problems than it can possibly solve and therefore should be avoided.
For example, the gravity created by amoving particle is not simply enhanced by the
factor gamma. It has a more complicated dependence on the velocity and the effect of
gravity is considered in General Relativity.
Similar to its non relativistic counterpart, the 4-momentum is the same before and after
collision of any number of particles. You can think of momentum conservation as being
a basic law of physics or a mathematical axiom of the theory. But remember that the
validity of an axiom in physics is subject to experimental testing. Momentum
conservation law agrees with all the experiments done so far. Mathematically, the 4-
momentum conservation reads
before collision after collision
n n
n n
=
P P
, (76)
where
n
P
is the 4-momentum of n-th particle. Because this relation is stated in terms of
4-vectors, the equality is automatically Lorentz invariant. That is, once it is valid in one
inertial reference frame it is also valid in all inertial reference frames.
Three Lectures on Special Relativity by Taras Plakhotnik
32
The 4-momentum is not conserved when you change the reference frame (it will be
transformed according to Lorentz transformation). Therefore
before collision before collision
n n
n n
P P
,
where the prime indicates that the 4-momenta are referred to a different inertial
reference frame.
The equality (76) can be written separately for the first three components of the 4-
momentum and for its fourth component
before collision after collision
n n n n n n
m m =
before collision after collision
n n n n
m m =
From Newtons physics we know two quantities which are conserved in any collision
(one is a vector and the second is a scalar). These quantities are the 3-momentum and
the total energy (note that the kinetic energy is conserved only in elastic collisions).
Relativistic 3-momentum and total energy
We identify the vector m
as a relativistic 3-momentum
( ) rel
m p
.
It is a vector in Euclidian space. You can add relativistic 3-momentum to another 3-
momentum, you can rotate it 3D space, calculated scalar product as
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
1 2 1 2 1 2 1 2
rel rel rel rel rel rel rel rel
x x y y z z
p p p p p p + + p p . So defined
( ) ( )
1 2
rel rel
p p is not invariant
under Lorentz transformations. However, in reference frames which are not moving
relative to each other but only rotated relative to each other,
( ) ( )
1 2
rel rel
p p as defined
above is an invariant (that is a scalar product if only rotation and translation of a
reference frame is allowed). If the reference frame is replaced by a new reference frame
which is moving relative the first one, the Lorentz transformations are applied to the 4-
momentum where the 3-momentum represents only the first three coordinates.
The forth coordinate of the 4-momentum is mc . If we multiply it by c , the result can
be identified as the relativistic total energy.
2
mc E (77)
Three Lectures on Special Relativity by Taras Plakhotnik
33
There are several reasons for identifying
2
mc as the total energy. (1) This value has
the units of energy (mass multiplied by the square of velocity), (2) it is conserved in all
collisions if calculated for the total of all involved particles, (3) it looks nice, and (4) it
gives correct value for the kinetic energy in a non relativistic limit as shown below.
First, we note that when the 3-velocity of the particle is zero, its total energy is
2
mc . If
the particle is moving, its energy is increased due to kinetic energy. Therefore, the
kinetic energy KE a free moving particle is given by
2 2 2
2 2 2
2
2
2
1
1 ....
2 2
1
mc m
KE mc mc mc
c
c
| |
= + +
|
\
(78)
where a Taylors expansion assuming small value of
2 2
c is used. The kinetic energy
has limited application in relativity because the splitting of the total energy between the
potential and the kinetic energy is not always obvious.
With the new definitions in place, the 4-momentum can now be also written as
( )
( )
, /
rel
E c P p
(79)
The square of the 4-momentum reads
2 2 2 ( )2 2 2
/
rel
E c p m c = P
(80)
Note 1:
( )2 ( )2 ( )2 ( )2 rel rel rel rel
x y z
p p p p + + is the squared length of the relativistic 3-vector
of the momentum.
Note 2: For photons
( ) rel
E p c = and therefore
2
0 = P
. The fact that 4-momentum
squared is zero for photons should not confuse. Of course, the 3-momentum and the
total energy are never zero for a photon.
( ) rel
E p c = can be derived from Maxwell
equations and also from the fact that for photons 0 m = . If m were not zero for photons,
their energies would be infinitely large because photons move with the speed of light in
vacuum and the corresponding factor
( )
1/ 2
2 2
1 / c
is infinitely large.
4-acceleration
Three Lectures on Special Relativity by Taras Plakhotnik
34
Like in a non relativistic case, the 4-acceleration is defined as a time derivative of the 4-
velocity. But to ensure that the obtained quantity is a 4-vector, we should take the
derivative over the proper time.
( )
, , , , , ,
x y z x y z
d d d
c c
d d dt
= =
V
A
(81)
When calculating the derivative, we should not forget that will also depend on time if
the speed changes.
( ) ( )
2
3
1/ 2 3/ 2 2
2 2 2 2
1 /
1 / 1 /
d d c d d
dt dt dt c dt
c c
= = =
(82)
Useful and equivalent expressions for 4-acceleration are
[ ] [ ]
2 4 2 4
2
, , 0 ,
d d d d
c
dt dt dt c dt c
= + = +
A a
(83)
A 3-vector a
in the above expressions is a 3-vector of acceleration d dt a
.
Examples and Some Interesting Results
1. If the length of the 3-velocity vector (that is the speed) is time independent, then
2
, 0 =
A a
2. At the moment when the instantaneous
3-velocity is zero,
[ ]
, 0 = A a
.
Consider a co-moving frame where the
instantaneous velocity of a particle is zero. Let the
direction of the 3-acceleration in the co-moving frame be in the direction of the x-axis.
Hence in the instantaneous acceleration in the co-moving frame is
[ ]
, 0, 0, 0
x
= A
. In a
reference frame where the co-moving frame moves with the velocity of the particle, the
4-acceleration is given by Eq. (83). On the other hand this acceleration can be obtained
by Lorentz transformation of A
which results in , 0, 0,
x x
c
=
A
. Therefore
comparing the forth component in this expression and in Eq. (83) one gets
( )
3/ 2
2 2
1 /
x
d
c
dt
= (84)
[ ] , 0, 0
x
=
x
y
x
y
Three Lectures on Special Relativity by Taras Plakhotnik
35
This differential equation describes how the velocity changes if a particle accelerated
with a constant acceleration in its co-moving frame. Integration of this equation leads to
( )
1/ 2
2 2
1 /
x
c t
= , which is straightforward to solve for and get
( ) ( )
1/ 2 1/ 2
2 2 2 2 2 2
1
x x
x x
t t
c
c t t c
= =
+ +
(85)
The velocity increases in time but never reaches the speed of light in vacuum. When the
velocity is small relative to the speed of light we recover the not relativistic relation
x
t = .
3. The scalar product of 4-acceleration and 4-velocity of the same particle is always
zero. To prove this note that in the reference frame where the instantaneous 3-velocity is
zero, the 4-velocity is , c
0
. In such a reference frame, the 4-acceleration is
[ ]
, 0 = A a
.
4-force
In line with classical mechanics, the relativistic Newtons law for 4-vectors reads
d
d
= P F
(86)
The law can also be written in terms of 4-velocity and 4-acceleration
( )
d d dm d dm
m m m
d d d d d
= = + = + =
V
P V V V A F
(87)
Note, in non relativistic counterpart of the second Newtons law the derivative of mass
over time is also present if the mass is not a constant. Therefore there is nothing really
new in this equation.
To solve dynamical problems (for example, to calculate the trajectory of a particle) one
needs an expression of the force in Eq. (87). Since gravity is excluded from SR (you
need general relativity to deal with gravity), electromagnetic force is the only
fundamental force which can be easily included in the theory (see section about the
electromagnetic fields below).
3-force and 4-force
Three Lectures on Special Relativity by Taras Plakhotnik
36
The relation between 3-force and 4-force follows from
( )
( )
1
, ,
rel
d dt d E dE
d d dt c c dt
= = =
F P p f
, (88)
where the 3-force is defined as a time derivative of the relativistic 3-momentum
( ) rel
d
dt
f p
(89)
Note: The relativistic 3-momentum
( ) rel
m p
represents the first 3 coordinates of the
4-momentumP
, that is
( )
, ,
rel
x y z
P P P =
p
. However, the 3-force is a time derivative of
the relativistic 3-momentum and therefore , ,
x y z
F F F =
f
because the first three
components of the 4-force are the derivative of the 3-momentum over the proper time.
Useful equalities describing properties of the 4-force are derived below.
2 2
dm dm
c m c
d d
= + = F V A V
(90)
On the other hand
2 2
dE
dt
= F V f
(91)
Therefore
2 2 2
dm dE
c
d dt
= f
(92)
and if 0 dm d = then
dE
dt
= f
(93)
Relativistic transformation of the 3-force
The transformations of three components of the 3-force are similar to the transformation
derived for the 3-velocity. This is not surprising because there is a clear analogy
between the expressions for the 4-force and for the 4-velocity.
u
X
Y
X
Y
f
Figure 5. In a not primed
reference frame, a particle moves
with 3-velocity
and experiences
3-force f
. The primed reference
frame moves with velocity u
as
accepted in the standard
configuration.
Three Lectures on Special Relativity by Taras Plakhotnik
37
( )
1
,
dE
c dt
=
F f
(94)
( )[ ]
, c = V
(95)
For example, using transformation of F
as a 4-vector one can derive
( ) ( ) ( ) ( )
1 1
1 u dE
f u f
c c dt
=
and therefore
( ) ( )
( )
1 1
1
u
u dE
f f
c c dt
This can be further simplified by using Eq. (50). The complete set of transformations for
3-force reads
( )( )
( )( )
1 1 2 2
1
2 2
2
1
3 3
2
1
1
1 /
1
;
1 /
1
1 /
u dE
f f
u c c dt
f f
u u c
f f
u u c
| |
=
|
\
=
(96)
The fourth coordinate of the 4-force gives the transformation for power.
1 2
1
1
1 /
dE dE
uf
dt u c dt
| |
=
|
\
(97)
A rest mass preserving force is such a force that 0 dm d = . In this case dE dt = f
and therefore
1 1 2 2
1
1
1 /
u
f f
u c c
| |
=
|
\
f
(98)
An example of such a force is Lorentz 3-force acting on a moving charged particle.
Transformation of magnetic and electrical fields
The Lorentz 3-force acting on a moving charged particle reads
q q = + f b e , (99)
Three Lectures on Special Relativity by Taras Plakhotnik
38
where b is a 3-vector of magnetic
field and e is a 3-vector of
electrical field, is the 3-velocity
of the particle, and q is the charge
of the particle.
Note: The coefficients in this
equation depend on the units used.
For example, in the Gaussian units
the Lorentz 3-force is
G G G G
q c q = + f b e . The relation
between the Gaussian units and the
international system of units for the
electrical and magnetic fields and
electrical charge is given below for
your reference
( ) ( )
( )
1/2 1/ 2
0 0
1/ 2
2
0 0 0
4 4
4 ; 1/
SI G SI G
SI G
c
= =
= =
b b e e
The electrical charge q is proportional to the number of elementary particles (for
example, electrons for a negative charge) and is invariant for all reference frames. For
briefness we set 1 q = . Because
( ) ( ) ( )
2 3 3 2 3 1 1 3 1 2 2 1
b b b b b b = + + b i j k , (100)
where i , j , and k are corresponding orthogonal unit vectors.
In a way, the Lorentz 3-force defines the electrical and magnetic fields. The
transformation of b and e fields can be derived using transformations already derived
for 3-force and 3-velocity.
We begin by writing down the components of the Lorentz force in the non primed and
primed reference frames which read
1 2 3 3 2 1
f b b e = +
1 2 3 3 2 1
f b b e = +
2 3 1 1 3 2
f b b e = +
2 3 1 1 3 2
f b b e = + (101)
b
x
i
y
i
z
i
b
Fig. Magnetic-field part of the Lorentz force.
The magnetic field vector in xz-plane. The vector
product is perpendicular to the xz-plane.
( ) ( ) ( )
x y z
x y z
x y z
x y z z y y x z z x z x y y x
b b b
b b b b b b
=
+
i i i
b
i i i
, , and
x y z
i i i are unit vectors in x, y, and z
directions respectively.
Three Lectures on Special Relativity by Taras Plakhotnik
39
3 1 2 2 1 3
f b b e = +
3 1 2 2 1 3
f b b e = +
respectively. Then, we use the velocity transformations
( ) ( )
3 1 2
1 2 3
2
2 2
1
1 1
; ;
1 /
( ) 1 / ( ) 1 /
u
u c
u u c u u c
= = =
(102)
to express the primed force in terms of non primed velocity. For example, for the first
component of the primed force we get
( ) ( )
3 2
1 3 2 1
2 2
1 1
( ) 1 / ( ) 1 /
f b b e
u u c u u c
= +
(103)
On the other hand, we can use relativistic transformation of a 3-force instead. This
transformation states that
2
1
1
2
1
/
1 /
f u c
f
u c
=
f
. (104)
One can now substitute the expressions for f (see Eqs. (101)) in the not primed
reference frame, and get
( )
2
2 3 3 2 1 1 1 2 2 3 3
1
2
1
2 2 2
2 3 3 2 1 1 1 2 2 3 3
2
1
2 2
3 2 2 3
2 3 1
2 2
1 1
/
1 /
/ / /
1 /
/ /
1 / 1 /
b b e u e e e c
f
u c
b b e e u c e u c e u c
u c
b e u c b e u c
e
u c u c
+ + +
= =
+
= =
+
= +
(105)
The two expressions for
1
f (Eqs. 103 and 105) must be equivalent no matter what the
values of
1
,
2
, and
3
are. Therefore the factors in front of
2
and
3
must be equal.
This gives expressions for
3
b and
2
b .
( )
2
3 3 2
/ b b e u c = (106)
( )
2
2 2 3
/ b b e u c = + (107)
The terms independent of the velocity must also be equal. It follows that
1 1
e e = (108)
Expressions for
2
e ,
3
e , and
1
b can be obtained when the expressions for
2
f and
3
f are
derived in two different ways (as it was done above for
1
f ) are compared. All the
results are summarized below.
Three Lectures on Special Relativity by Taras Plakhotnik
40
( )
( )
1 1
2 2 3
3 3 2
1 1
2 2 3
2
3 3 2
2
e e
e e ub
e e ub
b b
u
b b e
c
u
b b e
c
=
=
= +
=
| |
= +
|
\
| |
=
|
\
(109)
Concluding remarks
Maxwell equations
0 0 0
div 0; curl
t
= = +
e
b b j
(110)
0
div ; curl
t
= =
b
e e
(111)
stay valid if the Lorentz transformations of space-time are used, the e and b fields are
transformed as derived above, and the current density j and the charge density are
changed as components of a 4-current density
[ ]
0 0
, , c c
=
J V j
(112)
This can be verified directly by substitution of the appropriate transformation derived in
this course.
One can also introduce an electromagnetic field tensor (a generalization of a 4-vector)
and write the Maxwell equations in a 4-tensor form but we will not develop this
technique in these lectures. Those who are interested may read one of the recommended
books.
Three Lectures on Special Relativity by Taras Plakhotnik
41
Some General Hints for Solving Problems
Colliding or breaking into parts particles are usually one type of problems where
Special Relativity is easy to use. What you need to do is to write down 4 equalities. One
for the total energy and three for each component of the relativistic 3-momentum vector
(thus you cover all four components of the 4-momentum vector). In each of these
equalities you should have energy/momentum of all particles added together before
collision (say on the left hand side) and total energy/momentum of the involved
particles after collision on the other side of the equality. The expressions for the total
energy and the relativistic 3-momentum are
2
2 2
1 /
mc
E
c
=
,
( )
2 2
1 /
rel x
x
m
p
c
,
( )
2 2
1 /
y rel
y
m
p
c
,
( )
2 2
1 /
rel z
z
m
p
c
It is useful to use symmetry and choose the direction of the x, y, and z so that some of
the momenta are obviously zeros. This will reduce the number of the equations. In
exceptional situation a trick can help to answer the question. Note that m in these
expressions is the mass of a particle (in some other texts, a term rest mass is used
instead of simply mass, a term used in these notes). If the particle is made of parts, you
can not add mass of these parts together to get the mass of the composite particle. This
is because the primary particles can interact with each other or can move relative to
each other. Anything of the above will change the mass. Therefore, unless the particles
are elementary (like electrons, e.g.) you can not consider the masses to be the same
before and after collision and the problem generally speaking, can not be solved if some
extra information is not provided. This can be, for example, information that particles
stick together after collision. In this case the velocities of the parts after collision are
equal and the number of unknowns in the equations is dramatically reduced.
The electrical/magnetic fields may need conversion from one reference frame to
another. If it is easier to solve the problem in some reference frame, then you can get the
solution for a different frame by applying appropriate transformations
Three Lectures on Special Relativity by Taras Plakhotnik
42
( )
( )
1 1
2 2 3
3 3 2
1 1
2 2 3
2
3 3 2
2
e e
e e ub
e e ub
b b
u
b b e
c
u
b b e
c
=
=
= +
=
| |
= +
|
\
| |
=
|
\
But watch the sign of u! In these equations u is positive if the primed RF moves in the
direction of increasing positive values of x of the not primed RF.
Some problems require solving differential equations describing the dynamics of the
system.
2 2
1 /
d m
dt
c
=
Note that each of the components of the 3-velocity and the speed (the magnitude of the
velocity) may be time dependent. Of course you need an expression for force f
to write
down the actual equation. Since gravity is excluded from SR, a typical example of a
force is the Lorentz force q q = + f b e .
The Twin Paradox
Everyone who teaches or study Special Relativity should an opinion about the Twin
Paradox.
Вам также может понравиться
- Moore UnitR Chapters 1 and 2Документ42 страницыMoore UnitR Chapters 1 and 2output_running_jumpОценок пока нет
- Dynamics - Lecture Notes: Chris White (C.white@physics - Gla.ac - Uk)Документ44 страницыDynamics - Lecture Notes: Chris White (C.white@physics - Gla.ac - Uk)Saravana ArunОценок пока нет
- Special Relativity: 6.1 Basic ConceptsДокумент29 страницSpecial Relativity: 6.1 Basic ConceptscfndnhjОценок пока нет
- The Theory of Relativity: And Other EssaysОт EverandThe Theory of Relativity: And Other EssaysРейтинг: 4.5 из 5 звезд4.5/5 (11)
- Tarun Jain Physics Investigatory ProjectДокумент23 страницыTarun Jain Physics Investigatory ProjectTarun JainОценок пока нет
- Relativity NotesДокумент80 страницRelativity Noteszcap excelОценок пока нет
- Relativity of Space and TimeДокумент23 страницыRelativity of Space and TimeAngelica LlamasОценок пока нет
- PHY 317 Classical Mechanics Lecture NotesДокумент60 страницPHY 317 Classical Mechanics Lecture NotesericОценок пока нет
- General Invariant Velocity Originated From Principle of Special Relativity and Triple Special Theories of RelativityДокумент12 страницGeneral Invariant Velocity Originated From Principle of Special Relativity and Triple Special Theories of RelativityValdemar Romero 5Оценок пока нет
- Ga GR RevДокумент74 страницыGa GR RevIrina AnanieОценок пока нет
- Lessons On Time and Causality From Quantum Field TheoryДокумент5 страницLessons On Time and Causality From Quantum Field TheoryI.B. BirulaОценок пока нет
- 0201 2Документ52 страницы0201 2Sveti JeronimОценок пока нет
- Against Wavefunction RealismДокумент13 страницAgainst Wavefunction RealismOutis NemoОценок пока нет
- UNIT-II (Relativistic Mechanics)Документ22 страницыUNIT-II (Relativistic Mechanics)varsha gatlaОценок пока нет
- Traschen J. - An Introduction To Black Hole EvaporationДокумент33 страницыTraschen J. - An Introduction To Black Hole EvaporationKhem UpathambhakulОценок пока нет
- RelativityДокумент42 страницыRelativityKarl Jimenez SeparaОценок пока нет
- The Relativistic Correction According To The Doubling TheoryДокумент18 страницThe Relativistic Correction According To The Doubling TheoryalejuliaОценок пока нет
- Physics RelativityДокумент26 страницPhysics RelativityPriyanshu ChaudharyОценок пока нет
- Lecture 1 2009 Relativistic Kinematics IДокумент19 страницLecture 1 2009 Relativistic Kinematics ISooraj RajendranОценок пока нет
- Special Relativity Part 1Документ21 страницаSpecial Relativity Part 1njoudiehОценок пока нет
- (Pre-) Causality and The Lorentz TransformationsДокумент7 страниц(Pre-) Causality and The Lorentz TransformationsEnrico MenottiОценок пока нет
- Mystery of The Cosmological ConstantДокумент15 страницMystery of The Cosmological ConstantMajo BuroОценок пока нет
- Object Oriented Programming: Assignment # 01Документ4 страницыObject Oriented Programming: Assignment # 01MaleehaBabarОценок пока нет
- Introduction To Field The+-1Документ9 страницIntroduction To Field The+-1Chief ArisaОценок пока нет
- Cosmological Relativity: A Special Relativity For CosmologyДокумент12 страницCosmological Relativity: A Special Relativity For CosmologySrinivas SaiОценок пока нет
- Principles of Chemistry - CH 5 MechanicsДокумент32 страницыPrinciples of Chemistry - CH 5 MechanicsEoLegantoОценок пока нет
- CH 2: Newton On Space and MotionДокумент32 страницыCH 2: Newton On Space and Motionrebe53Оценок пока нет
- Weatherall, James Owen (2013) What Is A Singularity in Geometrized Newtonian GravitationДокумент16 страницWeatherall, James Owen (2013) What Is A Singularity in Geometrized Newtonian GravitationTommaso CiminoОценок пока нет
- GR LecturesДокумент116 страницGR LecturesPaul RyanОценок пока нет
- Physics ProДокумент7 страницPhysics ProArup DuttaОценок пока нет
- "Forget Time": Essay Written For The Fqxi Contest On The Nature of TimeДокумент16 страниц"Forget Time": Essay Written For The Fqxi Contest On The Nature of Timefluffa23Оценок пока нет
- Frames of Reference and Newton's Laws: Michael Fowler University of Virginia 3/14/08Документ4 страницыFrames of Reference and Newton's Laws: Michael Fowler University of Virginia 3/14/08Rodessa Pearl Magbanua MagdaugОценок пока нет
- Cosmology Notes 1 EditedДокумент17 страницCosmology Notes 1 EditedRohin KumarОценок пока нет
- Tachyon - WikipediaДокумент44 страницыTachyon - WikipediaGhost GamingОценок пока нет
- Bedingham Et Al. - 2014 - Matter Density and Relativistic Models of Wave Function CollapseДокумент9 страницBedingham Et Al. - 2014 - Matter Density and Relativistic Models of Wave Function CollapseBeto CarreñoОценок пока нет
- What Is The Difference Between Classical Physics and Quantum PhysicsДокумент8 страницWhat Is The Difference Between Classical Physics and Quantum PhysicsAppleОценок пока нет
- BK Pandey 01Документ70 страницBK Pandey 01Anurag SrivastavaОценок пока нет
- The Invariance of Spacetime IntervalДокумент11 страницThe Invariance of Spacetime IntervalGeorge Mpantes mathematics teacherОценок пока нет
- C348 Mathematics For General Relativity Chapters 3 and 4 (UCL)Документ28 страницC348 Mathematics For General Relativity Chapters 3 and 4 (UCL)ucaptd3Оценок пока нет
- General Relativity - NotesДокумент75 страницGeneral Relativity - NotesLuca DentiОценок пока нет
- Einstein's Theory of Relativity ExplainedДокумент5 страницEinstein's Theory of Relativity ExplainedCarl Angelo MartinОценок пока нет
- V C) - in Other Words, The Formulas of Special Relativity Should Reduce To TheДокумент3 страницыV C) - in Other Words, The Formulas of Special Relativity Should Reduce To TheDhanish SivalingamОценок пока нет
- EVOLUTION OF SPACE-TIME THEORIESДокумент15 страницEVOLUTION OF SPACE-TIME THEORIESJaime Feliciano HernándezОценок пока нет
- Relativity and Special TheoryДокумент33 страницыRelativity and Special Theorysonu kumarОценок пока нет
- Chronons, Time Atoms, and Quantized Time: Time Asymmetry Re-VisitedДокумент6 страницChronons, Time Atoms, and Quantized Time: Time Asymmetry Re-VisitedSam VakninОценок пока нет
- Einstein's Third Postulate PDFДокумент5 страницEinstein's Third Postulate PDFHerczegh TamasОценок пока нет
- Introduction to Scattering Theory and Potential ScatteringДокумент16 страницIntroduction to Scattering Theory and Potential ScatteringUltrazordОценок пока нет
- Theorey of Relativity, Chapter 1-1Документ25 страницTheorey of Relativity, Chapter 1-1sonimuskan929Оценок пока нет
- Proper Time 5 FINAL-2Документ29 страницProper Time 5 FINAL-2Henok TadesseОценок пока нет
- DiscretespacetimeДокумент20 страницDiscretespacetimeapi-316295772Оценок пока нет
- The ACTION in HEART of PHYSICS in Matter, Radiation and Space TimeДокумент16 страницThe ACTION in HEART of PHYSICS in Matter, Radiation and Space TimeGeorge Mpantes mathematics teacherОценок пока нет
- Emilio Casuso Romate and John Beckman - Dark Matter and Dark Energy: Breaking The Continuum Hypothesis?Документ5 страницEmilio Casuso Romate and John Beckman - Dark Matter and Dark Energy: Breaking The Continuum Hypothesis?AzmerzrОценок пока нет
- The Doubling TheoryДокумент14 страницThe Doubling Theoryrots7368100% (1)
- Local Conformal Symmetry: The Missing Symmetry Component For Space and TimeДокумент5 страницLocal Conformal Symmetry: The Missing Symmetry Component For Space and TimeKolyo DankovОценок пока нет
- Einstein's theory of moving bodiesДокумент24 страницыEinstein's theory of moving bodiesvlvОценок пока нет
- 582 Chapter1 PDFДокумент8 страниц582 Chapter1 PDFliliОценок пока нет
- The foundation of the generalized theory of relativityОт EverandThe foundation of the generalized theory of relativityРейтинг: 5 из 5 звезд5/5 (1)
- MATH7133 Assignment 1 Semester 2, 2016Документ2 страницыMATH7133 Assignment 1 Semester 2, 2016Chris RaymondОценок пока нет
- Classical Fields Approximation For Bosons at Nonzero TemperaturesДокумент38 страницClassical Fields Approximation For Bosons at Nonzero TemperaturesChris RaymondОценок пока нет
- Fundamentally VariantДокумент5 страницFundamentally VariantChris RaymondОценок пока нет
- Three Lectures On Special RelativityДокумент42 страницыThree Lectures On Special RelativityChris RaymondОценок пока нет
- As04 ErrorordersДокумент2 страницыAs04 ErrorordersChris RaymondОценок пока нет
- Module 5 Lecture 3 Test ExamДокумент3 страницыModule 5 Lecture 3 Test ExamChris RaymondОценок пока нет
- Microwave ExperimentДокумент18 страницMicrowave ExperimentChris RaymondОценок пока нет
- Getting Started May A 2011Документ1 044 страницыGetting Started May A 2011Vasilis_Siskos_8195100% (1)
- MQL4 Time and Time Related Issues GuideДокумент11 страницMQL4 Time and Time Related Issues GuideTanbeОценок пока нет
- Roller Coaster - Teacher VersionДокумент7 страницRoller Coaster - Teacher VersionTeachLABScIОценок пока нет
- Manuscript M1 15 10 2021Документ103 страницыManuscript M1 15 10 2021wallonОценок пока нет
- 978-0!00!818953-2 A Level Physics Support Materials Year 2, Sections 6, 7 and 8Документ25 страниц978-0!00!818953-2 A Level Physics Support Materials Year 2, Sections 6, 7 and 8Γιαννης Μπαζιωτης100% (2)
- Test 1 Unit 1 Physics Sem 1 2017Документ10 страницTest 1 Unit 1 Physics Sem 1 2017SongОценок пока нет
- SQ NP LQ From Chapter KinematicsДокумент8 страницSQ NP LQ From Chapter KinematicsSupreme PhuyalОценок пока нет
- Ricci Soliton and Conformal Ricci Soliton in Lorentzian β-Kenmotsu ManifoldДокумент12 страницRicci Soliton and Conformal Ricci Soliton in Lorentzian β-Kenmotsu ManifoldIoan DegauОценок пока нет
- Physics Homework Questions #2Документ2 страницыPhysics Homework Questions #2Phoenix SuohОценок пока нет
- Chapter 12 II Transformations III (2) ENRICHДокумент13 страницChapter 12 II Transformations III (2) ENRICHjuriah binti ibrahimОценок пока нет
- Projectile Motion - Jee NeetДокумент6 страницProjectile Motion - Jee NeetShashwat KhuranaОценок пока нет
- Speed, Time and DistanceДокумент33 страницыSpeed, Time and DistanceFahim AhmedОценок пока нет
- Mechanics UNSEENДокумент32 страницыMechanics UNSEENDulvan VitharanaОценок пока нет
- Module 19 Motion Along A Straight LineДокумент13 страницModule 19 Motion Along A Straight LineDon Amaru Sarma100% (1)
- The First Picture of A BlackholeДокумент4 страницыThe First Picture of A BlackholehoxiyaОценок пока нет
- Schwarzschild Black Hole Theory Origins and Key DiscoveriesДокумент3 страницыSchwarzschild Black Hole Theory Origins and Key DiscoveriesDebabrata shilОценок пока нет
- Maths Theory ErrorlessДокумент192 страницыMaths Theory ErrorlessabcОценок пока нет
- HW08 PDFДокумент1 страницаHW08 PDFShweta SridharОценок пока нет
- Lagrangian MethodДокумент50 страницLagrangian MethodrajuОценок пока нет
- EnergyДокумент5 страницEnergyKaterina TagleОценок пока нет
- (L4) - Gravitation - 23rd Oct.Документ64 страницы(L4) - Gravitation - 23rd Oct.Ritwik Kumar MishraОценок пока нет
- Ujian Bulanan 1 2020Документ6 страницUjian Bulanan 1 2020Helmi TarmiziОценок пока нет
- (Practise Sheet) Motion in 1D JEE Mains + NEETДокумент21 страница(Practise Sheet) Motion in 1D JEE Mains + NEETNazneen AktarОценок пока нет
- Tempus Edax RerumДокумент4 страницыTempus Edax RerumJonathan TookerОценок пока нет
- Tutorial Problems Wk1-4Документ4 страницыTutorial Problems Wk1-4Kano MolapisiОценок пока нет
- Assignment 13 - RelativityДокумент2 страницыAssignment 13 - RelativityMarcos Aaron TherthensОценок пока нет
- Projectile Motion Sample TestДокумент3 страницыProjectile Motion Sample TestbernardОценок пока нет
- Sample Paper-02 Physics (Theory) Class - Xi Answers: Weight Alpg LPG A A L M GДокумент9 страницSample Paper-02 Physics (Theory) Class - Xi Answers: Weight Alpg LPG A A L M GKabir BiswalОценок пока нет
- Check Your UnderstandingДокумент4 страницыCheck Your UnderstandingGalileo JuangcoОценок пока нет
- CH18Документ91 страницаCH18Ow Yong Chaan LoungОценок пока нет
- Work Energy (16!07!09) XI & XIIIДокумент20 страницWork Energy (16!07!09) XI & XIIISankar KumarasamyОценок пока нет