Вам также может понравиться
- Implementation of SVPWM Based Three Phase Inverter Using 8 Bit MicrocontrollerДокумент5 страницImplementation of SVPWM Based Three Phase Inverter Using 8 Bit MicrocontrollermitulОценок пока нет
- V/F Control of Three Phase Induction Motor Drive with Different PWM TechniquesДокумент15 страницV/F Control of Three Phase Induction Motor Drive with Different PWM TechniquesJaimin ChainaniОценок пока нет
- Digital Scalar Pulse Width Modulation Methods For Voltage Source Inverter Fed Ac DriveДокумент7 страницDigital Scalar Pulse Width Modulation Methods For Voltage Source Inverter Fed Ac DriveijsretОценок пока нет
- Inverter and SV-PWMДокумент5 страницInverter and SV-PWMcoep05Оценок пока нет
- Design and Implementation of Space Vector PWM Inverter Based On A Low Cost MicrocontrollerДокумент12 страницDesign and Implementation of Space Vector PWM Inverter Based On A Low Cost MicrocontrollerHaider NeamaОценок пока нет
- A Novel Space Vector Modulation (SVM) Controlled Inverter For Adjustable Speed Drive ApplicationsДокумент9 страницA Novel Space Vector Modulation (SVM) Controlled Inverter For Adjustable Speed Drive ApplicationsInternational Journal of Engineering Inventions (IJEI)Оценок пока нет
- Simulation of A Space Vector PWM Controller For A Five-Level Voltage-Fed Inverter Motor DriveДокумент7 страницSimulation of A Space Vector PWM Controller For A Five-Level Voltage-Fed Inverter Motor DriveIOSRjournalОценок пока нет
- A Vector Controlled Induction Motor Drive With Neural Network Based Space Vector Pulse Width ModulatorДокумент8 страницA Vector Controlled Induction Motor Drive With Neural Network Based Space Vector Pulse Width ModulatorTiruchengode VinothОценок пока нет
- Simplifi Ed SVPWM Based Hybrid PWM For Induction Motor Drives For The Reduction of Torque RipplesДокумент6 страницSimplifi Ed SVPWM Based Hybrid PWM For Induction Motor Drives For The Reduction of Torque RipplesKoukou AmkoukouОценок пока нет
- Novel SVPWM Algorithm Implementation for Three-Phase Power ConverterДокумент4 страницыNovel SVPWM Algorithm Implementation for Three-Phase Power ConverterRanjit SinghОценок пока нет
- Low Cost Digital Signal Generation For Driving Space Vector PWM InverterДокумент12 страницLow Cost Digital Signal Generation For Driving Space Vector PWM InverterJunaid AhmadОценок пока нет
- SVPWM Schemes Comparison for Two-Level and Three Level InvertersДокумент6 страницSVPWM Schemes Comparison for Two-Level and Three Level InvertersEzra NaveenaОценок пока нет
- Psim SVMДокумент9 страницPsim SVMNarendra ReddyОценок пока нет
- InvertersДокумент7 страницInverterslohitashriyaОценок пока нет
- Three Level InverterДокумент5 страницThree Level InverterManish PrajapatiОценок пока нет
- Letters: Harmonic Analysis of Advanced Bus-Clamping PWM TechniquesДокумент6 страницLetters: Harmonic Analysis of Advanced Bus-Clamping PWM TechniquesunnvishnuОценок пока нет
- A Hybrid PWM Strategy Combining Modified Space Vector and Triangle Comparison Methods - Vladimir Blasko PDFДокумент7 страницA Hybrid PWM Strategy Combining Modified Space Vector and Triangle Comparison Methods - Vladimir Blasko PDFStefania OliveiraОценок пока нет
- PWM VetorialДокумент7 страницPWM VetorialrocasojuОценок пока нет
- Adaptive Droop Control Applied ToДокумент6 страницAdaptive Droop Control Applied ToManoj BadoniОценок пока нет
- A Simple and Ultra-Fast DSP-Based Space Vector PWM Algorithm andДокумент6 страницA Simple and Ultra-Fast DSP-Based Space Vector PWM Algorithm andShiviAroraОценок пока нет
- Implementation of SVPWM Control On FPGA For Three Phase MATRIX CONVERTERДокумент6 страницImplementation of SVPWM Control On FPGA For Three Phase MATRIX CONVERTERIDESОценок пока нет
- Space Vector Pulse Width Modulation Schemes For Two-Level Voltage Source InverterДокумент5 страницSpace Vector Pulse Width Modulation Schemes For Two-Level Voltage Source InverterIDESОценок пока нет
- Simplified Space Vector PWM Algorithm For A Three Level InverterДокумент8 страницSimplified Space Vector PWM Algorithm For A Three Level InverterGanesh ChallaОценок пока нет
- A Fractal Approach To Generate Space Vector PWM For Multilevel InvertersДокумент6 страницA Fractal Approach To Generate Space Vector PWM For Multilevel InvertersTekalign TesfayeОценок пока нет
- Analysis and Simulation of Bus-Clamping PWM Techniques Based On Space Vector ApproachДокумент10 страницAnalysis and Simulation of Bus-Clamping PWM Techniques Based On Space Vector ApproachIjesat JournalОценок пока нет
- Karampuri 2016Документ6 страницKarampuri 2016Kill MongerОценок пока нет
- Space Vector PWM - 3Документ6 страницSpace Vector PWM - 3guanitouОценок пока нет
- Generalized Rail Clamping Sequences Based PWM (GRCPWM) Algorithm For Direct Torque Controlled Induction Motor DriveДокумент22 страницыGeneralized Rail Clamping Sequences Based PWM (GRCPWM) Algorithm For Direct Torque Controlled Induction Motor DriveHari ReddyОценок пока нет
- SpaceVector PWM InverteДокумент27 страницSpaceVector PWM InverteShoaib KhizerОценок пока нет
- Ijret - Study of Sinusoidal and Space Vector Pulse Width Modulation Techniques For A Cascaded Three-Level InverterДокумент6 страницIjret - Study of Sinusoidal and Space Vector Pulse Width Modulation Techniques For A Cascaded Three-Level InverterInternational Journal of Research in Engineering and TechnologyОценок пока нет
- 30th Annual IEEE Conference on Industrial ElectronicsДокумент6 страниц30th Annual IEEE Conference on Industrial Electronicsdjoo77Оценок пока нет
- FPGA Implementation On SVPWM MLIДокумент5 страницFPGA Implementation On SVPWM MLISheetal VermaОценок пока нет
- SpaceVector PWM InverterДокумент35 страницSpaceVector PWM Invertersolomong50% (2)
- PEMD2014 0282 FinalДокумент6 страницPEMD2014 0282 FinalSherif M. DabourОценок пока нет
- Multilevel Multiphase Space Vector PWM Algorithm Applied To Three-Phase ConvertersДокумент7 страницMultilevel Multiphase Space Vector PWM Algorithm Applied To Three-Phase ConvertersAthiesh KumarОценок пока нет
- Three-Level Inverter Performance Using Adaptive Neuro-Fuzzy Based Space Vector ModulationДокумент14 страницThree-Level Inverter Performance Using Adaptive Neuro-Fuzzy Based Space Vector ModulationiisteОценок пока нет
- Ijrte0205288291 PDFДокумент4 страницыIjrte0205288291 PDFPasupuleti SivakumarОценок пока нет
- Novel, Switch, Z-Source Three-Phase InverterДокумент6 страницNovel, Switch, Z-Source Three-Phase InverterJanjanam PraveenОценок пока нет
- Paper 2 - PEL20120014 - 2ndДокумент5 страницPaper 2 - PEL20120014 - 2ndSherif M. DabourОценок пока нет
- FPGA Realization of Space-Vector Pulse Width Modulation for a 3-Level InverterДокумент5 страницFPGA Realization of Space-Vector Pulse Width Modulation for a 3-Level InvertersrfmlpОценок пока нет
- Basic SVPWMДокумент6 страницBasic SVPWMVAMSIKRISHNAEEEОценок пока нет
- Fuzzy PI Speed Controller for Induction Motors Using FPGAДокумент7 страницFuzzy PI Speed Controller for Induction Motors Using FPGABharati RajaОценок пока нет
- Space Vector PWM Control of Dual Inverter Fed Open-End Winding Induction MotorДокумент7 страницSpace Vector PWM Control of Dual Inverter Fed Open-End Winding Induction MotorGanesh ChallaОценок пока нет
- 06125602Документ6 страниц06125602Ahmad Sadam SyaeroziОценок пока нет
- 2018 A Fast Model Predictive Control With Fixed Switching Frequency Based On Virtual Space Vector For Three-Phase InvertersДокумент7 страниц2018 A Fast Model Predictive Control With Fixed Switching Frequency Based On Virtual Space Vector For Three-Phase Invertersdaiduongxanh14113Оценок пока нет
- SVPWM & VbyfДокумент11 страницSVPWM & VbyfPravin NagraleОценок пока нет
- Durgasukumar 2011Документ6 страницDurgasukumar 2011aditya317crazyОценок пока нет
- Fujimoto - 2007Документ6 страницFujimoto - 2007Ariana Ribeiro LameirinhasОценок пока нет
- Analysis of Space Vector PWM For Three Phase Inverter and Comparison With SPWMДокумент8 страницAnalysis of Space Vector PWM For Three Phase Inverter and Comparison With SPWMАлексей ЯмаОценок пока нет
- A Switched Capacitor Waveform GeneratorДокумент3 страницыA Switched Capacitor Waveform GeneratorSaujal VaishnavОценок пока нет
- A New Approach Based On Sinusoidal PWM Inverter With PI Controller For Vector Control of Induction MotorДокумент7 страницA New Approach Based On Sinusoidal PWM Inverter With PI Controller For Vector Control of Induction MotortheijesОценок пока нет
- Simplified SVPWM Algorithm For VectorДокумент4 страницыSimplified SVPWM Algorithm For VectorPrudhvi RajОценок пока нет
- Simulation and Comparison of Three Level Inverter-392Документ10 страницSimulation and Comparison of Three Level Inverter-392Đức Khánh Đức KhánhОценок пока нет
- Space Vector PWM - 2Документ6 страницSpace Vector PWM - 2guanitouОценок пока нет
- Predictive Direct Power Control of Three-Phase Boost RectifierДокумент6 страницPredictive Direct Power Control of Three-Phase Boost RectifierArun KumarОценок пока нет
- Analysis and Design of Multicell DC/DC Converters Using Vectorized ModelsОт EverandAnalysis and Design of Multicell DC/DC Converters Using Vectorized ModelsОценок пока нет
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetОт EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetРейтинг: 2 из 5 звезд2/5 (1)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetОт EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetОценок пока нет
- VSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsОт EverandVSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsОценок пока нет
- Advanced Control of AC / DC Power Networks: System of Systems Approach Based on Spatio-temporal ScalesОт EverandAdvanced Control of AC / DC Power Networks: System of Systems Approach Based on Spatio-temporal ScalesОценок пока нет
- G12gasa Group5 PR2Документ7 страницG12gasa Group5 PR2Lizley CordovaОценок пока нет
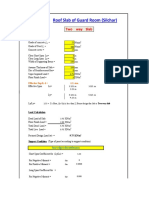
- Roof Slab of Guard RoomДокумент3 страницыRoof Slab of Guard RoomAditya KumarОценок пока нет
- Intermot Hydraulic Motors IAM+ Series Technical CatalogueДокумент81 страницаIntermot Hydraulic Motors IAM+ Series Technical CatalogueeduardoraulОценок пока нет
- Oracle SCM TrainingДокумент9 страницOracle SCM TrainingVishnu SajaiОценок пока нет
- Assessment of Groundwater Quality Using GIS - A Case Study of The Churu District of RajasthanДокумент9 страницAssessment of Groundwater Quality Using GIS - A Case Study of The Churu District of RajasthanSivaShankarОценок пока нет
- A1.2.3 Method Statement 4a Redacted Version2Документ98 страницA1.2.3 Method Statement 4a Redacted Version2ChanelОценок пока нет
- OD Main Switch & OD OFF Indicator Light CircuitДокумент4 страницыOD Main Switch & OD OFF Indicator Light Circuitcelestino tuliaoОценок пока нет
- Prepositions-Of-place Worksheet Azucena SalasДокумент3 страницыPrepositions-Of-place Worksheet Azucena SalasAndreia SimõesОценок пока нет
- BS 5896 2010Документ33 страницыBS 5896 2010shashiresh50% (2)
- Analytic DeviceДокумент4 страницыAnalytic DeviceuiuiuiuОценок пока нет
- Chap1-Geometrical Optics - ExercisesДокумент3 страницыChap1-Geometrical Optics - ExercisesReema HlohОценок пока нет
- Attachment To Division Memorandum No. - , S, 2020Документ3 страницыAttachment To Division Memorandum No. - , S, 2020Jasmin Move-RamirezОценок пока нет
- BNF Syntax of Ruby - Less than 40 character title for Ruby BNF syntax documentДокумент2 страницыBNF Syntax of Ruby - Less than 40 character title for Ruby BNF syntax documentChristian FerrazОценок пока нет
- Newsletter Template NewДокумент4 страницыNewsletter Template Newapi-458544253Оценок пока нет
- UntitledДокумент47 страницUntitledAndy SánchezОценок пока нет
- GRC Fiori End User Guide Final - V2Документ75 страницGRC Fiori End User Guide Final - V2Subhash BharmappaОценок пока нет
- RefrigerationДокумент11 страницRefrigerationBroAmirОценок пока нет
- Galaxy Service ManualДокумент100 страницGalaxy Service ManualGovind RajОценок пока нет
- SI Units in Geotechnical EngineeringДокумент7 страницSI Units in Geotechnical EngineeringfaroeldrОценок пока нет
- Google Analytics Certification Test QuestionsДокумент36 страницGoogle Analytics Certification Test QuestionsRoberto Delgato100% (1)
- Fortumo Mobile Payments API GuideДокумент8 страницFortumo Mobile Payments API GuideVladimir UtješinovićОценок пока нет
- Abstracts Book Nanotech 2013Документ151 страницаAbstracts Book Nanotech 2013felipe de jesus juarez torresОценок пока нет
- PERFAPPRAISAL Research proposal on performance appraisal practices at National Bank of Pakistan and United Bank LimitedДокумент4 страницыPERFAPPRAISAL Research proposal on performance appraisal practices at National Bank of Pakistan and United Bank LimitedNadia KhanОценок пока нет
- Applying The Haar Wavelet Transform To Time Series InformationДокумент27 страницApplying The Haar Wavelet Transform To Time Series InformationJohn LemonОценок пока нет
- Difference Between AND: Shahirah Nadhirah Madihah Suhana AtiqahДокумент11 страницDifference Between AND: Shahirah Nadhirah Madihah Suhana AtiqahShahirah ZafirahОценок пока нет
- Battery Testing and MaintenanceДокумент23 страницыBattery Testing and MaintenanceMormor Omerta0% (1)
- Method of MomentsДокумент114 страницMethod of MomentsankladhaОценок пока нет
- PD 957 AND BP 220 HOUSING DESIGN STANDARDSДокумент5 страницPD 957 AND BP 220 HOUSING DESIGN STANDARDSGeraldine F. CalubОценок пока нет
- Computer Science: FieldsДокумент2 страницыComputer Science: FieldstdoraxОценок пока нет