Вам также может понравиться
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- New Creation Image - Knowing Who You Are in ChristДокумент117 страницNew Creation Image - Knowing Who You Are in ChristDr. A.L. and Joyce GillОценок пока нет
- Sample School Climate SurveyДокумент3 страницыSample School Climate Surveyapi-454842648Оценок пока нет
- The Evolution of Knowledge by Niccolo TucciДокумент5 страницThe Evolution of Knowledge by Niccolo TucciPaulo RodriguesОценок пока нет
- Wolf, Werner and Bernhart, Walter (Ed.) - Description in Literature and Other MediaДокумент352 страницыWolf, Werner and Bernhart, Walter (Ed.) - Description in Literature and Other MediaElNegroLiterario100% (3)
- Term Paper - JP Rizal LovelifeДокумент12 страницTerm Paper - JP Rizal LovelifeArthur HermiasОценок пока нет
- Art of Oratory HandbookДокумент62 страницыArt of Oratory HandbookdaleОценок пока нет
- Opinion ParagraphДокумент1 страницаOpinion Paragraphapi-273326408Оценок пока нет
- Virtual Displacement ExamplesДокумент86 страницVirtual Displacement ExamplesMalik Rehan SyedОценок пока нет
- Sop He Ob ModifiedДокумент2 страницыSop He Ob Modifiedpratk2Оценок пока нет
- School Form 1 (SF 1)Документ6 страницSchool Form 1 (SF 1)Jeasza May Claire PorrasОценок пока нет
- Ethics Module 1 - IntroductionДокумент15 страницEthics Module 1 - IntroductionFainted Hope100% (1)
- Service Marketing Final 29102012Документ73 страницыService Marketing Final 29102012Prateek Maheshwari100% (1)
- Ethics From The MarginДокумент20 страницEthics From The MarginOvia HerbertОценок пока нет
- Productive and Conducive Learning Environment. Manageable ClassroomДокумент22 страницыProductive and Conducive Learning Environment. Manageable ClassroomJulialis Rachel TogangОценок пока нет
- Mormon Doctrine (Bruce R McConkie)Документ304 страницыMormon Doctrine (Bruce R McConkie)Zuleica Oliveira83% (6)
- How Google WorksДокумент9 страницHow Google WorksHoangDuongОценок пока нет
- Black Mirror:: Technostruggles, Capitalism, and Media Culture in The United KingdomДокумент119 страницBlack Mirror:: Technostruggles, Capitalism, and Media Culture in The United KingdomsavitriОценок пока нет
- Psychoanalytic CriticismДокумент2 страницыPsychoanalytic CriticismTimothy CraigОценок пока нет
- Reading DiagnosticДокумент4 страницыReading DiagnosticDanika BarkerОценок пока нет
- Research Methods ProjectДокумент28 страницResearch Methods Projectmahua100% (1)
- Chapter 1 ManagementДокумент33 страницыChapter 1 Managementfatma_mikdad2854Оценок пока нет
- AntiquarianismДокумент20 страницAntiquarianismGennaro EspositoОценок пока нет
- English For ComunicationДокумент15 страницEnglish For ComunicationWardah WardielaОценок пока нет
- Darkside Hypnosis - October Man PDFДокумент17 страницDarkside Hypnosis - October Man PDFManuel Herrera100% (3)
- Marketing ResearchДокумент31 страницаMarketing ResearchSrt Dinesh Kumar100% (3)
- MGMT3006 Assessments2 CaseStudyReportДокумент15 страницMGMT3006 Assessments2 CaseStudyReportiiskandarОценок пока нет
- Muhammad The Last Prophet in The Bible by Kais Al-KalbyДокумент293 страницыMuhammad The Last Prophet in The Bible by Kais Al-KalbyWaqarОценок пока нет
- Legal Ethics SyllabusДокумент13 страницLegal Ethics SyllabusNowie LuzungОценок пока нет
- Narrative Report On Classroom Management SY 2019-2020Документ5 страницNarrative Report On Classroom Management SY 2019-2020Red DelloroОценок пока нет
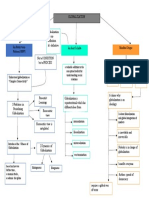
- GCWORLD Concept MapДокумент1 страницаGCWORLD Concept MapMoses Gabriel ValledorОценок пока нет