Вам также может понравиться
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
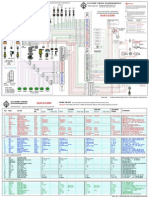
- Diagrama Electronico DT466Документ2 страницыDiagrama Electronico DT466Aldo Fran Vargas82% (22)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Isaac Asimov - "Nightfall"Документ20 страницIsaac Asimov - "Nightfall"Aditya Sharma100% (1)
- Creature Loot PDF - GM BinderДокумент97 страницCreature Loot PDF - GM BinderAlec0% (1)
- MathsДокумент27 страницMathsBA21412Оценок пока нет
- Primary Checkpoint - Science (0846) October 2016 Paper 2 MSДокумент12 страницPrimary Checkpoint - Science (0846) October 2016 Paper 2 MSdinakarc78% (9)
- Boat DesignДокумент8 страницBoat DesignporkovanОценок пока нет
- RPH Sains DLP Y3 2018Документ29 страницRPH Sains DLP Y3 2018Sukhveer Kaur0% (1)
- Transformer Diagnostic Testing Response: FrequencyДокумент10 страницTransformer Diagnostic Testing Response: Frequencyosvi009Оценок пока нет
- Aifa Motores TrifasicosДокумент4 страницыAifa Motores Trifasicososvi009Оценок пока нет
- Fenwal Smoke Detectors: Advantages/BenefitsДокумент2 страницыFenwal Smoke Detectors: Advantages/Benefitsosvi009Оценок пока нет
- Ajt PDFДокумент3 страницыAjt PDFsohaibazamОценок пока нет
- Huawei Switch S5700 How ToДокумент10 страницHuawei Switch S5700 How ToJeanОценок пока нет
- Cambridge IGCSE: Computer Science 0478/12Документ16 страницCambridge IGCSE: Computer Science 0478/12Rodolph Smith100% (2)
- Site AnalysisДокумент15 страницSite Analysismaanik005Оценок пока нет
- Applied SciencesДокумент25 страницApplied SciencesMario BarbarossaОценок пока нет
- The Three Key Linkages: Improving The Connections Between Marketing and SalesДокумент5 страницThe Three Key Linkages: Improving The Connections Between Marketing and SalesRuxandra PopaОценок пока нет
- Nozzle F Factor CalculationsДокумент5 страницNozzle F Factor CalculationsSivateja NallamothuОценок пока нет
- Adjectives Weekly Plan1Документ10 страницAdjectives Weekly Plan1RItta MariaОценок пока нет
- Investigation Report on Engine Room Fire on Ferry BerlinДокумент63 страницыInvestigation Report on Engine Room Fire on Ferry Berlin卓文翔Оценок пока нет
- The Diffusion of Microfinance: An Extended Analysis & Replication ofДокумент33 страницыThe Diffusion of Microfinance: An Extended Analysis & Replication ofNaman GovilОценок пока нет
- Mediclaim - ChecklistДокумент4 страницыMediclaim - ChecklistKarthi KeyanОценок пока нет
- UEME 1143 - Dynamics: AssignmentДокумент4 страницыUEME 1143 - Dynamics: Assignmentshikai towОценок пока нет
- India's 1991 Economic ReformsДокумент5 страницIndia's 1991 Economic ReformsLive AspireОценок пока нет
- Gulfco 1049 MaxДокумент5 страницGulfco 1049 MaxOm Prakash RajОценок пока нет
- Inventory of Vacant Units in Elan Miracle Sector-84 GurgaonДокумент2 страницыInventory of Vacant Units in Elan Miracle Sector-84 GurgaonBharat SadanaОценок пока нет
- Liebert PEX+: High Efficiency. Modular-Type Precision Air Conditioning UnitДокумент19 страницLiebert PEX+: High Efficiency. Modular-Type Precision Air Conditioning Unitjuan guerreroОценок пока нет
- Nigerian Romance ScamДокумент10 страницNigerian Romance ScamAnonymous Pb39klJОценок пока нет
- Pakage PAU (Fruits)Документ70 страницPakage PAU (Fruits)Gary Bhullar57% (7)
- CHEMOREMEDIATIONДокумент8 страницCHEMOREMEDIATIONdeltababsОценок пока нет
- GF26.10-S-0002S Manual Transmission (MT), Function 9.7.03 Transmission 716.6 in MODEL 639.601 /603 /605 /701 /703 /705 /711 /713 /811 /813 /815Документ2 страницыGF26.10-S-0002S Manual Transmission (MT), Function 9.7.03 Transmission 716.6 in MODEL 639.601 /603 /605 /701 /703 /705 /711 /713 /811 /813 /815Sven GoshcОценок пока нет
- Nidhi Investment Consultant: Magic Mix Illustration For Mr. AB Prafulbhai (Age 18)Документ2 страницыNidhi Investment Consultant: Magic Mix Illustration For Mr. AB Prafulbhai (Age 18)jdchandrapal4980Оценок пока нет
- FloridaSharkman ProtocolsДокумент14 страницFloridaSharkman ProtocolsgurwaziОценок пока нет
- Smartrac - Iolineug - r5Документ66 страницSmartrac - Iolineug - r5Darwin Elvis Giron HurtadoОценок пока нет
- ms360c Manual PDFДокумент130 страницms360c Manual PDFEdgardoCadaganОценок пока нет
- MinistopДокумент23 страницыMinistopAlisa Gabriela Sioco OrdasОценок пока нет