Вам также может понравиться
- Gear Types, Spur, Helical, Bevel, Rack and Pinion, Worm - Engineers EdgeДокумент3 страницыGear Types, Spur, Helical, Bevel, Rack and Pinion, Worm - Engineers EdgeMohd Sabaruddin Mohd SallehОценок пока нет
- Gear Terminology and Its Types: Pitch CircleДокумент6 страницGear Terminology and Its Types: Pitch CircleMuhammad UmerОценок пока нет
- Pulleys 1 Rotary Cams 1 Gears 2: Pulleys Are Used To Transfer Rotating Motion, Via A BeltДокумент17 страницPulleys 1 Rotary Cams 1 Gears 2: Pulleys Are Used To Transfer Rotating Motion, Via A BeltRentu PhiliposeОценок пока нет
- Mechanisms Notes 2012Документ12 страницMechanisms Notes 2012kookwfОценок пока нет
- Axes and Motion StructureДокумент30 страницAxes and Motion StructureBhuban LimbuОценок пока нет
- Gearabc A1 PDFДокумент19 страницGearabc A1 PDFjinriОценок пока нет
- Design of Jigs, Fixtures and Press Tools UNIT 1: Locating and Clamping PrinciplesДокумент18 страницDesign of Jigs, Fixtures and Press Tools UNIT 1: Locating and Clamping PrinciplesVarthini RajaОценок пока нет
- Design of Jigs, Fixtures and Press Tools UNIT 1: Locating and Clamping PrinciplesДокумент20 страницDesign of Jigs, Fixtures and Press Tools UNIT 1: Locating and Clamping PrinciplesVarthini RajaОценок пока нет
- Everything You Need to Know About Drill BitsДокумент23 страницыEverything You Need to Know About Drill BitsIndah CharismasariОценок пока нет
- Cams and Camfollowers LessonДокумент38 страницCams and Camfollowers LessonleannaОценок пока нет
- Lathe Alignment Tests (MetrologyДокумент63 страницыLathe Alignment Tests (MetrologySudhanwa KulkarniОценок пока нет
- Design of Jigs Fixtures and Press Tools PDFДокумент4 страницыDesign of Jigs Fixtures and Press Tools PDFniharika kadiriОценок пока нет
- Tool Makers MicroscopeДокумент11 страницTool Makers Microscopeirfanajai100% (1)
- Chapter2 Locating Principles and DevicesДокумент57 страницChapter2 Locating Principles and DevicesAbhishek KulhariОценок пока нет
- Design of Jigs, Fixtures and Press Tools UNIT 1: Jigs and FixtureДокумент12 страницDesign of Jigs, Fixtures and Press Tools UNIT 1: Jigs and FixtureVarthini RajaОценок пока нет
- Simple Machine Component of Rube GoldbergДокумент7 страницSimple Machine Component of Rube GoldbergThomas Adam Johnson100% (1)
- W1 Introduction To Mechanisms and Kinematics 20140724Документ38 страницW1 Introduction To Mechanisms and Kinematics 20140724Izzat MalikОценок пока нет
- Mechanical SickelДокумент42 страницыMechanical SickelPaul AntoОценок пока нет
- 5.1 Chordal Tooth Thickness MeasurementДокумент20 страниц5.1 Chordal Tooth Thickness Measurementsharma RISHIОценок пока нет
- Simplemechanism 180302020307Документ58 страницSimplemechanism 180302020307Kunal GadgilОценок пока нет
- Cam and FollowersДокумент18 страницCam and Followersnandkishore_singh100% (1)
- Machine Tools Guide: Lathes, Milling, Cutting ToolsДокумент85 страницMachine Tools Guide: Lathes, Milling, Cutting ToolsVipul Mahajan100% (1)
- Gear Teeth: Clocks and ShipsДокумент16 страницGear Teeth: Clocks and ShipsČika BrkoОценок пока нет
- 3 MechanismsДокумент35 страниц3 Mechanismsesham2100% (1)
- Surface PlateДокумент5 страницSurface Platetevqwe1Оценок пока нет
- CamДокумент95 страницCamMurugesan KandaОценок пока нет
- Gear IntroductionДокумент17 страницGear Introductionpatel ketan100% (1)
- Involute Spur GearДокумент7 страницInvolute Spur GeardhimanrayatОценок пока нет
- The Indexing or Dividing Head For Milling MachineДокумент4 страницыThe Indexing or Dividing Head For Milling MachineDion Adi PutraОценок пока нет
- Gear Cutting AttachmentДокумент40 страницGear Cutting AttachmentGoutham Reddy100% (1)
- Reaming, Boring and Broaching Processes ExplainedДокумент58 страницReaming, Boring and Broaching Processes ExplainedVikas PotluriОценок пока нет
- Manufacturing of Spur Gear: Aim of The ExperimentДокумент5 страницManufacturing of Spur Gear: Aim of The ExperimentParameshwara MeenaОценок пока нет
- Toothed GearingДокумент33 страницыToothed GearingpvkkrОценок пока нет
- IndexingДокумент25 страницIndexingJaymin PatelОценок пока нет
- Mechanical Drives Gear SelectionДокумент46 страницMechanical Drives Gear Selectionganga6013Оценок пока нет
- Lathe Accessories and Attachments Lathe Accessories:: 1. Face PlateДокумент7 страницLathe Accessories and Attachments Lathe Accessories:: 1. Face PlateRohan SahaОценок пока нет
- 507 Mechanical Movemets PDFДокумент132 страницы507 Mechanical Movemets PDFDario_ScribОценок пока нет
- Gear and Gear TrainДокумент21 страницаGear and Gear Trainm_er100Оценок пока нет
- ClutchesДокумент17 страницClutchesRanjit RajendranОценок пока нет
- Design of Jigs, Fixtures and Press Tools UNIT 1: Jigs and FixtureДокумент16 страницDesign of Jigs, Fixtures and Press Tools UNIT 1: Jigs and FixtureVarthini RajaОценок пока нет
- Machine Elements, Power Transmission Devices-pages-BY MBOKEHДокумент93 страницыMachine Elements, Power Transmission Devices-pages-BY MBOKEHAvopaul ZeОценок пока нет
- Tool Makers Microscope PPT - Siddhant SinghДокумент15 страницTool Makers Microscope PPT - Siddhant SinghSiddhant Singh100% (1)
- Design of Jigs Fixtures and Press ToolsДокумент4 страницыDesign of Jigs Fixtures and Press ToolsKarthic EaswarОценок пока нет
- Force MeasurementДокумент18 страницForce MeasurementKali DasОценок пока нет
- Production Technology Lab FileДокумент45 страницProduction Technology Lab FileSakshi RoyОценок пока нет
- Instructions For Build Your Own Maglev TrainДокумент3 страницыInstructions For Build Your Own Maglev TrainTakeuchi Kyousuke TakatoОценок пока нет
- Injection Mould Unit-IIДокумент103 страницыInjection Mould Unit-II20PP001 balaji suresh bhaleОценок пока нет
- GearsДокумент22 страницыGearsAnurag MidhaОценок пока нет
- MBEYA UNIVERSITY OF SCIENCE AND TECHNOLOGY COLLEGE OF ENGINEERING AND TECHNOLOGY KINEMATICS OF MACHINE TOOLSДокумент37 страницMBEYA UNIVERSITY OF SCIENCE AND TECHNOLOGY COLLEGE OF ENGINEERING AND TECHNOLOGY KINEMATICS OF MACHINE TOOLSSadikiel100% (1)
- Gear Terminology: Pitch Circle: Addendum Circle: Dedendum Circle: ClearanceДокумент11 страницGear Terminology: Pitch Circle: Addendum Circle: Dedendum Circle: ClearanceFawad HassanОценок пока нет
- Ramsey BE66 - Blinky Eyes Animated Display PDFДокумент16 страницRamsey BE66 - Blinky Eyes Animated Display PDFAl PetitОценок пока нет
- 1 1 4 A PulleydrivessprocketsДокумент4 страницы1 1 4 A Pulleydrivessprocketsapi-30839565067% (3)
- Ch21 Fundamentals of Cutting2Документ70 страницCh21 Fundamentals of Cutting2manojc68Оценок пока нет
- Types of Angles in Drill BitsДокумент2 страницыTypes of Angles in Drill BitsAbdul AhadОценок пока нет
- Belts, Gears & Gear Trains ExplainedДокумент13 страницBelts, Gears & Gear Trains Explainedbhaskarrajusa8034Оценок пока нет
- Student Copy-Manufacturing Process SelectionДокумент49 страницStudent Copy-Manufacturing Process SelectionAnishMendisОценок пока нет
- Tools, Jigs and Die Design GuideДокумент2 страницыTools, Jigs and Die Design GuideTamirat Nemomsa100% (1)
- Chapter 2-Gear SystemДокумент26 страницChapter 2-Gear SystemNui Yuhu KuwОценок пока нет
- GEARS: AN OVERVIEW OF COMMON GEAR TYPESДокумент18 страницGEARS: AN OVERVIEW OF COMMON GEAR TYPESVasudev GuptaОценок пока нет
- Hello World DДокумент1 страницаHello World DIhsan NordinОценок пока нет
- Hospital Fire DrillДокумент58 страницHospital Fire DrillWan SamiraОценок пока нет
- 1-Status Comformation For Undergraduate Project ReportДокумент1 страница1-Status Comformation For Undergraduate Project ReportWan SamiraОценок пока нет
- 2 TitleДокумент1 страница2 TitleWan SamiraОценок пока нет
- 1-Status Comformation For Undergraduate Project ReportДокумент1 страница1-Status Comformation For Undergraduate Project ReportWan SamiraОценок пока нет
- MembranesДокумент6 страницMembranesWan SamiraОценок пока нет
- Lamp IranДокумент10 страницLamp IranWan SamiraОценок пока нет
- New Microsoft PowerPoint PresentationДокумент1 страницаNew Microsoft PowerPoint PresentationWan SamiraОценок пока нет
- Chapter 1 (A) - Stress and Strain RenewДокумент65 страницChapter 1 (A) - Stress and Strain RenewWan SamiraОценок пока нет
- English Financial Assistance ApplicationДокумент4 страницыEnglish Financial Assistance ApplicationAlyssa JenningsОценок пока нет
- Clinical Case Report No 2Документ11 страницClinical Case Report No 2ملک محمد صابرشہزاد50% (2)
- Heat Exchanger Sodium SilicateДокумент2 страницыHeat Exchanger Sodium SilicateChristopher BrownОценок пока нет
- Pictorial History of AOTAДокумент5 страницPictorial History of AOTAThe American Occupational Therapy Association0% (4)
- Female Reproductive System Histology IДокумент5 страницFemale Reproductive System Histology ISolomon Seth SallforsОценок пока нет
- Health 6 Q 4 WK 6 Module 6 Version 4Документ16 страницHealth 6 Q 4 WK 6 Module 6 Version 4Kassandra BayogosОценок пока нет
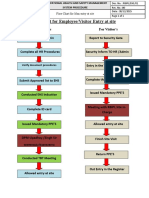
- fLOW CHART FOR WORKER'S ENTRYДокумент2 страницыfLOW CHART FOR WORKER'S ENTRYshamshad ahamedОценок пока нет
- Nicenstripy Gardening Risk AssessmentДокумент38 страницNicenstripy Gardening Risk AssessmentVirta Nisa100% (1)
- Classification of Nanomaterials, The Four Main Types of Intentionally Produced NanomaterialsДокумент5 страницClassification of Nanomaterials, The Four Main Types of Intentionally Produced NanomaterialssivaenotesОценок пока нет
- PDS in Paschim MidnaporeДокумент12 страницPDS in Paschim Midnaporesupriyo9277Оценок пока нет
- Aphasia PDFДокумент4 страницыAphasia PDFRehab Wahsh100% (1)
- Schneider Electric PowerPact H-, J-, and L-Frame Circuit Breakers PDFДокумент3 страницыSchneider Electric PowerPact H-, J-, and L-Frame Circuit Breakers PDFAnonymous dH3DIEtzОценок пока нет
- Aplikasi Berbagai Jenis Media Dan ZPT Terhadap Aklimatisasi Anggrek VandaДокумент15 страницAplikasi Berbagai Jenis Media Dan ZPT Terhadap Aklimatisasi Anggrek VandaSihonoОценок пока нет
- Practice of Epidemiology Performance of Floating Absolute RisksДокумент4 страницыPractice of Epidemiology Performance of Floating Absolute RisksShreyaswi M KarthikОценок пока нет
- Endocrown Review 1Документ9 страницEndocrown Review 1Anjali SatsangiОценок пока нет
- Bentel J408Документ64 страницыBentel J408Bojan MarkovicОценок пока нет
- BCM Continuous ImprovementДокумент22 страницыBCM Continuous ImprovementnikoОценок пока нет
- Proper Operating Room Decorum: Lee, Sullie Marix P. Maderal, Ma. Hannah Isabelle JДокумент15 страницProper Operating Room Decorum: Lee, Sullie Marix P. Maderal, Ma. Hannah Isabelle Jjoannamhay ceraldeОценок пока нет
- Sigma monitor relayДокумент32 страницыSigma monitor relayEdwin Oria EspinozaОценок пока нет
- Cell City ProjectДокумент8 страницCell City ProjectDaisy beОценок пока нет
- 8-26-16 Police ReportДокумент14 страниц8-26-16 Police ReportNoah StubbsОценок пока нет
- Lesson 1 CA 3Документ13 страницLesson 1 CA 3myndleОценок пока нет
- Maximizing Oredrive Development at Khoemacau MineДокумент54 страницыMaximizing Oredrive Development at Khoemacau MineModisa SibungaОценок пока нет
- Abstract - Tropen Tag 2011 PDFДокумент634 страницыAbstract - Tropen Tag 2011 PDFzmoghesОценок пока нет
- Chemical and Physical Properties of Refined Petroleum ProductsДокумент36 страницChemical and Physical Properties of Refined Petroleum Productskanakarao1Оценок пока нет
- Base para Detectores de Humo y Temperatura KIDDE KI-SBДокумент2 страницыBase para Detectores de Humo y Temperatura KIDDE KI-SBAnderson CastañedaОценок пока нет
- Erapol EHP95AДокумент2 страницыErapol EHP95AMohammad Doost MohammadiОценок пока нет
- g21 Gluta MsdsДокумент3 страницыg21 Gluta Msdsiza100% (1)
- COVID 19 Impacts On The Construction IndustryДокумент46 страницCOVID 19 Impacts On The Construction IndustryAlemayehu DargeОценок пока нет
- New Microsoft Excel WorksheetДокумент4 страницыNew Microsoft Excel WorksheetRaheel Neo AhmadОценок пока нет
- Becky Lynch: The Man: Not Your Average Average GirlОт EverandBecky Lynch: The Man: Not Your Average Average GirlРейтинг: 4.5 из 5 звезд4.5/5 (12)
- Horse Training 101: Key Techniques for Every Horse OwnerОт EverandHorse Training 101: Key Techniques for Every Horse OwnerРейтинг: 4.5 из 5 звезд4.5/5 (27)
- Crazy for the Storm: A Memoir of SurvivalОт EverandCrazy for the Storm: A Memoir of SurvivalРейтинг: 3.5 из 5 звезд3.5/5 (217)
- The Arm: Inside the Billion-Dollar Mystery of the Most Valuable Commodity in SportsОт EverandThe Arm: Inside the Billion-Dollar Mystery of the Most Valuable Commodity in SportsРейтинг: 4 из 5 звезд4/5 (49)
- Elevate and Dominate: 21 Ways to Win On and Off the FieldОт EverandElevate and Dominate: 21 Ways to Win On and Off the FieldРейтинг: 5 из 5 звезд5/5 (4)
- Life Is Not an Accident: A Memoir of ReinventionОт EverandLife Is Not an Accident: A Memoir of ReinventionРейтинг: 3.5 из 5 звезд3.5/5 (7)
- Endure: How to Work Hard, Outlast, and Keep HammeringОт EverandEndure: How to Work Hard, Outlast, and Keep HammeringРейтинг: 4.5 из 5 звезд4.5/5 (283)
- What Winners Won't Tell You: Lessons from a Legendary DefenderОт EverandWhat Winners Won't Tell You: Lessons from a Legendary DefenderРейтинг: 4.5 из 5 звезд4.5/5 (7)
- Bloodlines: The True Story of a Drug Cartel, the FBI, and the Battle for a Horse-Racing DynastyОт EverandBloodlines: The True Story of a Drug Cartel, the FBI, and the Battle for a Horse-Racing DynastyРейтинг: 4 из 5 звезд4/5 (8)
- Sprawlball: A Visual Tour of the New Era of the NBAОт EverandSprawlball: A Visual Tour of the New Era of the NBAРейтинг: 4 из 5 звезд4/5 (11)
- The Perfect Mile: Three Athletes, One Goal, and Less Than Four Minutes to Achieve ItОт EverandThe Perfect Mile: Three Athletes, One Goal, and Less Than Four Minutes to Achieve ItОценок пока нет
- The Teen’s Living Guide: Unlocking Your Potential for a Remarkable JourneyОт EverandThe Teen’s Living Guide: Unlocking Your Potential for a Remarkable JourneyРейтинг: 5 из 5 звезд5/5 (76)
- The Truth About Aaron: My Journey to Understand My BrotherОт EverandThe Truth About Aaron: My Journey to Understand My BrotherОценок пока нет
- Summary: Range: Why Generalists Triumph in a Specialized World by David Epstein: Key Takeaways, Summary & Analysis IncludedОт EverandSummary: Range: Why Generalists Triumph in a Specialized World by David Epstein: Key Takeaways, Summary & Analysis IncludedРейтинг: 4.5 из 5 звезд4.5/5 (6)
- Badasses: The Legend of Snake, Foo, Dr. Death, and John Madden's Oakland RaidersОт EverandBadasses: The Legend of Snake, Foo, Dr. Death, and John Madden's Oakland RaidersРейтинг: 4 из 5 звезд4/5 (15)
- The Inside Game: Bad Calls, Strange Moves, and What Baseball Behavior Teaches Us About OurselvesОт EverandThe Inside Game: Bad Calls, Strange Moves, and What Baseball Behavior Teaches Us About OurselvesРейтинг: 4 из 5 звезд4/5 (7)
- Body Confidence: Venice Nutrition's 3 Step System That Unlocks Your Body's Full PotentialОт EverandBody Confidence: Venice Nutrition's 3 Step System That Unlocks Your Body's Full PotentialРейтинг: 4 из 5 звезд4/5 (2)
- Patriot Reign: Bill Belichick, the Coaches, and the Players Who Built a ChampionОт EverandPatriot Reign: Bill Belichick, the Coaches, and the Players Who Built a ChampionРейтинг: 3.5 из 5 звезд3.5/5 (30)
- The Last Dive: A Father and Son's Fatal Descent into the Ocean's DepthsОт EverandThe Last Dive: A Father and Son's Fatal Descent into the Ocean's DepthsОценок пока нет
- Last Child in the Woods: Saving Our Children From Nature-Deficit DisorderОт EverandLast Child in the Woods: Saving Our Children From Nature-Deficit DisorderРейтинг: 4 из 5 звезд4/5 (283)
- Earnhardt Nation: The Full-Throttle Saga of NASCAR's First FamilyОт EverandEarnhardt Nation: The Full-Throttle Saga of NASCAR's First FamilyРейтинг: 3.5 из 5 звезд3.5/5 (7)