Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (120)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Recruiter Cheat SheetДокумент16 страницRecruiter Cheat Sheetadhi_naren50% (2)
- DBMSДокумент61 страницаDBMScompiler&automataОценок пока нет
- Deadlock Recovery &preventtionДокумент21 страницаDeadlock Recovery &preventtionsusheel sethОценок пока нет
- Deep Freeze Standard User GuideДокумент24 страницыDeep Freeze Standard User GuideFahmiJbОценок пока нет
- Iot Based Prepaid Energy MeterДокумент4 страницыIot Based Prepaid Energy Metersangeetha sangeethaОценок пока нет
- Relational Database Management SystemДокумент30 страницRelational Database Management SystemYashaswini RajОценок пока нет
- Maskolis TemplateДокумент51 страницаMaskolis TemplateNannyk WidyaningrumОценок пока нет
- Java Advanced Imaging APIДокумент26 страницJava Advanced Imaging APIanilrkurupОценок пока нет
- Create, Check and Drop FOREIGN KEY CONSTRAINT On SQL SERVER TableДокумент8 страницCreate, Check and Drop FOREIGN KEY CONSTRAINT On SQL SERVER TableSrinivasОценок пока нет
- s7-1200 Cpu Firmware Overview enДокумент14 страницs7-1200 Cpu Firmware Overview enleandroОценок пока нет
- Mariam Shahab's ResumeДокумент1 страницаMariam Shahab's ResumeMShahabОценок пока нет
- Systemsoftwarenotes 100929171256 Phpapp02Документ201 страницаSystemsoftwarenotes 100929171256 Phpapp02Shruthi PatilОценок пока нет
- Skype For Business BW Calc Version 2.70 User GuideДокумент62 страницыSkype For Business BW Calc Version 2.70 User GuidevipermyОценок пока нет
- Sybase MuthuganeshДокумент9 страницSybase MuthuganeshMehul RuwalaОценок пока нет
- 3.5.3.4 Packet Tracer - Configure and Verify EBGP - PkaДокумент5 страниц3.5.3.4 Packet Tracer - Configure and Verify EBGP - PkaHenry VizcainoОценок пока нет
- Class12 3 Function OverloadingДокумент25 страницClass12 3 Function Overloadingsrijak singhОценок пока нет
- Config Guide Firewall PolicerДокумент548 страницConfig Guide Firewall PolicerOL VinОценок пока нет
- Video Formats A. List of Most Common CodecsДокумент7 страницVideo Formats A. List of Most Common CodecsKhen BauaОценок пока нет
- Factory IO and PLCSIMMДокумент11 страницFactory IO and PLCSIMMtarikeОценок пока нет
- Queensland Health Infomration and Communications and Technology Cabling Standard V1.4Документ167 страницQueensland Health Infomration and Communications and Technology Cabling Standard V1.4Lovedeep BhuttaОценок пока нет
- Midterm 2 Practice With AnswersДокумент8 страницMidterm 2 Practice With AnswersNick As TelloОценок пока нет
- Soundiron Voice of Rapture - The Alto - User Manual PDFДокумент22 страницыSoundiron Voice of Rapture - The Alto - User Manual PDFBaba GeorgeОценок пока нет
- Keilani's Robot Unicorn (3.5e Monster)Документ2 страницыKeilani's Robot Unicorn (3.5e Monster)Amy LewisОценок пока нет
- LWDFДокумент17 страницLWDFneerajОценок пока нет
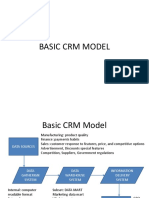
- CRM Model and ArchitectureДокумент33 страницыCRM Model and ArchitectureVivek Jain100% (1)
- VO ExtensionДокумент6 страницVO ExtensionnagkkkkkОценок пока нет
- VKF 524 enДокумент22 страницыVKF 524 enLong LeoОценок пока нет
- GS1 UBL MasterData Guidance 201610Документ12 страницGS1 UBL MasterData Guidance 201610Ja BaОценок пока нет
- Data Scientist: How To Become AДокумент45 страницData Scientist: How To Become Aamol karape100% (1)
- Free ITIL Dumps, ITIL V3 Dumps For Foundation Certificate Exam, Sample Questions and Answer Papers D 3Документ10 страницFree ITIL Dumps, ITIL V3 Dumps For Foundation Certificate Exam, Sample Questions and Answer Papers D 3Silvia GreenОценок пока нет