Вам также может понравиться
- Computers: State Estimation and Localization Based On Sensor Fusion For Autonomous Robots in Indoor EnvironmentДокумент15 страницComputers: State Estimation and Localization Based On Sensor Fusion For Autonomous Robots in Indoor EnvironmentsowОценок пока нет
- FYP Review PaperДокумент6 страницFYP Review PaperMatthew MontebelloОценок пока нет
- Sensors 20 05409Документ19 страницSensors 20 05409mezianeОценок пока нет
- Robotics Kinematics Dynamics and Applications FinalДокумент13 страницRobotics Kinematics Dynamics and Applications FinalJeff AtuaОценок пока нет
- Review of Related Literature CathДокумент10 страницReview of Related Literature CathCathlyn AbionОценок пока нет
- Study On Structural Modeling and Kinematics Analysis of A Novel Wheel-Legged Rescue RobotДокумент17 страницStudy On Structural Modeling and Kinematics Analysis of A Novel Wheel-Legged Rescue RobotZehra ÇİFCİBAŞIОценок пока нет
- Applied Sciences: Structural Design and Kinematics Simulation of Hydraulic Biped RobotДокумент23 страницыApplied Sciences: Structural Design and Kinematics Simulation of Hydraulic Biped RobotShubham PariharОценок пока нет
- Experiences in Deploying Test Arenas For Autonomous Mobile RobotsДокумент8 страницExperiences in Deploying Test Arenas For Autonomous Mobile RobotsCarlos RamirezОценок пока нет
- Literature Review Mobile RobotДокумент8 страницLiterature Review Mobile Robotafmzzaadfjygyf100% (1)
- Research Paper On Space RoboticsДокумент4 страницыResearch Paper On Space Roboticssmltlfrif100% (1)
- Intelligent Navigation of An Autonomous Outdoor Mobile Robot in A Dynamic EnvironmentДокумент5 страницIntelligent Navigation of An Autonomous Outdoor Mobile Robot in A Dynamic EnvironmentSigfred Vincent LarotОценок пока нет
- ROS Navigation Concepts and TutorialДокумент28 страницROS Navigation Concepts and TutorialvipulОценок пока нет
- Path Planning of Mobile Agents Using Ai TechniqueДокумент64 страницыPath Planning of Mobile Agents Using Ai TechniqueGautam RaminiОценок пока нет
- Cui 2021 J. Phys. Conf. Ser. 1865 042068Документ10 страницCui 2021 J. Phys. Conf. Ser. 1865 042068mujahid naumanОценок пока нет
- 1I11-IJAET1111203 Novel 3dДокумент12 страниц1I11-IJAET1111203 Novel 3dIJAET JournalОценок пока нет
- SM3075Документ15 страницSM3075eir235dОценок пока нет
- An Approach of Ir-Based Short-Range Correspondence Systems For Swarm Robot Balanced Requisitions and CommunicationsДокумент10 страницAn Approach of Ir-Based Short-Range Correspondence Systems For Swarm Robot Balanced Requisitions and CommunicationsAdam HansenОценок пока нет
- 067 PDFДокумент10 страниц067 PDFanitapinkyОценок пока нет
- Variable Formation Control of Multiple Robots Via VRC and Formation Switching To Accommodate Large Heading Changes by Leader RobotДокумент12 страницVariable Formation Control of Multiple Robots Via VRC and Formation Switching To Accommodate Large Heading Changes by Leader Robotkurts010Оценок пока нет
- Localization and Mapping Aproximation For Autonomous Ground Platforms, Implementing SLAM AlgorithmsДокумент5 страницLocalization and Mapping Aproximation For Autonomous Ground Platforms, Implementing SLAM AlgorithmsIvan RodriguezОценок пока нет
- Abbasov 2019 IOP Conf. Ser. Mater. Sci. Eng. 560 012001 PDFДокумент9 страницAbbasov 2019 IOP Conf. Ser. Mater. Sci. Eng. 560 012001 PDFPoornima JoshiОценок пока нет
- Literature SurveyДокумент6 страницLiterature SurveySanthosh Kumar NeelamОценок пока нет
- Robotics Research The International Journal Of: Bounding On Rough Terrain With The Littledog RobotДокумент25 страницRobotics Research The International Journal Of: Bounding On Rough Terrain With The Littledog RobotTaufik AlmorОценок пока нет
- Ramezani 2020Документ7 страницRamezani 2020Nguyễn PhúcОценок пока нет
- Snake Robot Research PaperДокумент7 страницSnake Robot Research Paperikrndjvnd100% (1)
- Collaborative Quadricopter-Mobile Robots Ground Scan Using ARTAGS Visual Pose EstimationДокумент6 страницCollaborative Quadricopter-Mobile Robots Ground Scan Using ARTAGS Visual Pose EstimationHarsha Vardhan BaleОценок пока нет
- Trajectory Generation and Tracking Using The AR - Drone 2.0 Quadcopter UAVДокумент6 страницTrajectory Generation and Tracking Using The AR - Drone 2.0 Quadcopter UAVkhoamaiОценок пока нет
- Robotics Harik - 2018Документ20 страницRobotics Harik - 2018Vänhëë ËscöbärОценок пока нет
- A Critique of Current Developments in SimultaneousДокумент13 страницA Critique of Current Developments in Simultaneousbob wuОценок пока нет
- 27 PDFДокумент8 страниц27 PDFSenthil KumarОценок пока нет
- Paper Dynamic Path PlanningДокумент12 страницPaper Dynamic Path Planningmahtlactli.gcОценок пока нет
- Objective & Outcome of RoboticsДокумент3 страницыObjective & Outcome of RoboticsMechanicalОценок пока нет
- Atlas Exploration and Mapping With A Sparse Swarm of Networked IoT RobotsДокумент5 страницAtlas Exploration and Mapping With A Sparse Swarm of Networked IoT RobotsRazanne Abu-AishehОценок пока нет
- Sensors: Recycling and Updating An Educational Robot Manipulator With Open-Hardware-ArchitectureДокумент22 страницыSensors: Recycling and Updating An Educational Robot Manipulator With Open-Hardware-ArchitectureNelson Camilo de AlmeidaОценок пока нет
- Robotic Arm Thesis PDFДокумент7 страницRobotic Arm Thesis PDFNat Rice100% (2)
- Distributed Range-Based Relative Localization of Robot SwarmsДокумент17 страницDistributed Range-Based Relative Localization of Robot Swarmshbhbhb hbhbhbОценок пока нет
- (Elearnica - Ir) - Robotic Systems Applied To Power Substations - A State-Of-The-Art SurveyДокумент6 страниц(Elearnica - Ir) - Robotic Systems Applied To Power Substations - A State-Of-The-Art SurveyjorjijonОценок пока нет
- Current-Based Slippage Detection and Odometry Correction For Mobile Robots and Planetary RoversДокумент13 страницCurrent-Based Slippage Detection and Odometry Correction For Mobile Robots and Planetary RoversKerry SunОценок пока нет
- Collision Identification Using Radar: Oakland University School of Engineering and Computer ScienceДокумент33 страницыCollision Identification Using Radar: Oakland University School of Engineering and Computer ScienceSujith JanardananОценок пока нет
- Experimental Evaluation and Comparison of LiDAR SLAM Algorithms For Mobile RoboticsДокумент8 страницExperimental Evaluation and Comparison of LiDAR SLAM Algorithms For Mobile Roboticscafiro7900Оценок пока нет
- Fusing Vision Based Bearing MeasurementsДокумент8 страницFusing Vision Based Bearing MeasurementsAlexandru MatasaruОценок пока нет
- A Search and Rescue Robot With Tele-Operated Tether Docking SystemДокумент7 страницA Search and Rescue Robot With Tele-Operated Tether Docking SystemSoumen BanerjeeОценок пока нет
- Implementation of Ros Navigation Stack On Lego Mindstorms NXT 2.0 RobotДокумент6 страницImplementation of Ros Navigation Stack On Lego Mindstorms NXT 2.0 RobotwendersoncsdepОценок пока нет
- Biomav: Bio-Inspired Intelligence For Autonomous Flight: BstractДокумент8 страницBiomav: Bio-Inspired Intelligence For Autonomous Flight: BstractVincent SliekerОценок пока нет
- A Novel Design of Delta Robot: AbstractДокумент13 страницA Novel Design of Delta Robot: AbstractGoodwill EnterprisesОценок пока нет
- Walking Algorithm For Robotis Op3 Humanoid Robot With Force SensorsДокумент5 страницWalking Algorithm For Robotis Op3 Humanoid Robot With Force Sensorsfurqon maulanaОценок пока нет
- Basic of Kalman FilterДокумент20 страницBasic of Kalman FilterWaseem AsifОценок пока нет
- TranningДокумент17 страницTranningHeera PrajapatОценок пока нет
- Grant FP7-2012-IRSES 318902 RABOT Project UK RO CN - Vladareanu - 22july2013Документ21 страницаGrant FP7-2012-IRSES 318902 RABOT Project UK RO CN - Vladareanu - 22july2013adrian8086Оценок пока нет
- Adapt: Real-Time Adaptive Pedestrian Tracking For Crowded ScenesДокумент8 страницAdapt: Real-Time Adaptive Pedestrian Tracking For Crowded ScenesnemeОценок пока нет
- Sensors 19 03631Документ24 страницыSensors 19 03631Alam Castillo HerreraОценок пока нет
- Sensors 19 03631Документ24 страницыSensors 19 03631Praveen Kumar JeyaprakashОценок пока нет
- 2015 Velez Certad Ruiz TrajectorygenerationandtrackingusingtheAR - DronequadcopterДокумент7 страниц2015 Velez Certad Ruiz TrajectorygenerationandtrackingusingtheAR - DronequadcopterJean Claude SanganoОценок пока нет
- ACM1Документ7 страницACM1Ricky LayderosОценок пока нет
- Robotics 10 00111 v3Документ17 страницRobotics 10 00111 v3RAZIQ YOUSSEFОценок пока нет
- Base PapДокумент6 страницBase PapAnonymous ovq7UE2WzОценок пока нет
- Art SerbtДокумент9 страницArt SerbtAbdelilah HilaliОценок пока нет
- Aquatic RobotДокумент8 страницAquatic Robotapi-268716430% (1)
- Summit 1Документ2 страницыSummit 1Laura Rua BassОценок пока нет
- 8 Places To Visit in Colombia . Just BecauseДокумент2 страницы8 Places To Visit in Colombia . Just BecauseLaura Rua BassОценок пока нет
- P633 OrderForm - v33 - 022018Документ14 страницP633 OrderForm - v33 - 022018Laura Rua BassОценок пока нет
- 8 Places To Visit in Colombia . Just BecauseДокумент2 страницы8 Places To Visit in Colombia . Just BecauseLaura Rua BassОценок пока нет
- Cur So 6Документ31 страницаCur So 6clara robayoОценок пока нет
- ALT CodesДокумент1 страницаALT CodesElle RalukОценок пока нет
- When I Was in CollegeДокумент1 страницаWhen I Was in CollegeLaura Rua BassОценок пока нет
- 18 - Chemical Treatment of Stainless Steel - 2014Документ19 страниц18 - Chemical Treatment of Stainless Steel - 2014nikko septianОценок пока нет
- Perry 02Документ2 страницыPerry 02Thaly MejiaОценок пока нет
- Ultimate ESAS Data Bank CompilationДокумент19 страницUltimate ESAS Data Bank CompilationVea ValcorzaОценок пока нет
- Construction Schedule Template 05Документ7 страницConstruction Schedule Template 05bharat gadaraОценок пока нет
- Advanced Vibration Chapter03Документ130 страницAdvanced Vibration Chapter03Alooy MohamedОценок пока нет
- Multiple-Unit Material Balances I: Cheme 101 - 6.4 Worksheet 1 Semester Ay 2020-2021 Department of Chemical EngineeringДокумент6 страницMultiple-Unit Material Balances I: Cheme 101 - 6.4 Worksheet 1 Semester Ay 2020-2021 Department of Chemical EngineeringAcademicBMОценок пока нет
- Jetking Rajajinagar MinДокумент7 страницJetking Rajajinagar MinNeha ShekarОценок пока нет
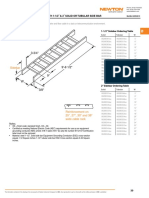
- Newton B CableRackДокумент48 страницNewton B CableRackjuliocastОценок пока нет
- ZbirkicaДокумент520 страницZbirkicaVladimir MilovanovicОценок пока нет
- Plue InformationДокумент34 страницыPlue InformationBisam AlhafizОценок пока нет
- JEE-Mains Score CardДокумент1 страницаJEE-Mains Score CardSrikanta MishraОценок пока нет
- Report of Apollo 201 Review BoardДокумент2 540 страницReport of Apollo 201 Review BoardBob Andrepont100% (2)
- ZipGrade User Guide JPДокумент6 страницZipGrade User Guide JPJinsen Paul MartinОценок пока нет
- 2010 Batch (Sem 1 11-12)Документ10 страниц2010 Batch (Sem 1 11-12)prateek_7892Оценок пока нет
- 1SDA071192R1 E4 2n 4000 Ekip Dip Lsi 3p F HRДокумент3 страницы1SDA071192R1 E4 2n 4000 Ekip Dip Lsi 3p F HRjunior_jazzzОценок пока нет
- Course Objective and Outcome FormДокумент2 страницыCourse Objective and Outcome FormSajedur Rahman MishukОценок пока нет
- Statistical Mechanics: Lecture A0: Phase TransitionsДокумент5 страницStatistical Mechanics: Lecture A0: Phase TransitionsTushar GhoshОценок пока нет
- IPECS-eMG80 Quick Start GuideДокумент11 страницIPECS-eMG80 Quick Start GuideDjromeo EdyОценок пока нет
- PPC Porcelain Solid Core Post Insulators and Operating RodsДокумент23 страницыPPC Porcelain Solid Core Post Insulators and Operating RodsCHRISTIANОценок пока нет
- Technical Summary: Semiconductor MC68HC11A8 MC68HC11A1 MC68HC11A0 8-Bit MicrocontrollersДокумент45 страницTechnical Summary: Semiconductor MC68HC11A8 MC68HC11A1 MC68HC11A0 8-Bit MicrocontrollersElias CoronelОценок пока нет
- Chapter 11Документ38 страницChapter 11Ismail HussainОценок пока нет
- Asr 903 DatasheetДокумент4 страницыAsr 903 DatasheetDiaz WildanОценок пока нет
- TNCS EarthingДокумент3 страницыTNCS Earthingjoan benwari100% (1)
- Building Completion Certificate: Certificate Number Plot Number Initial Issue DateДокумент2 страницыBuilding Completion Certificate: Certificate Number Plot Number Initial Issue DateAbrar AbbasiОценок пока нет
- Ultra ETK20910Документ2 страницыUltra ETK20910emil gasimovОценок пока нет
- New Build Snagging List TemplateДокумент13 страницNew Build Snagging List TemplatekekerodeОценок пока нет
- Hydroboration Oxidation or (1R) (+) Alpha PineneДокумент4 страницыHydroboration Oxidation or (1R) (+) Alpha Pinenewilso279100% (1)
- The Cunard Building, LiverpoolДокумент2 страницыThe Cunard Building, LiverpoolIbrahim FawwazОценок пока нет
- Project Report On Edible Oil Packaging Machinery: Indian Institute of Packaging, KolkataДокумент36 страницProject Report On Edible Oil Packaging Machinery: Indian Institute of Packaging, KolkataHemlata nagОценок пока нет