Вам также может понравиться
- Unit 1 PPT Introduction To Electric VehicleДокумент97 страницUnit 1 PPT Introduction To Electric VehicleAnonymous xaeuoo450% (2)
- Driveline Dynamics NotesДокумент19 страницDriveline Dynamics NotesprabhjotbhangalОценок пока нет
- Ev Bit ArrangedДокумент15 страницEv Bit ArrangedPrabhuОценок пока нет
- Ev - Bit - S FinalДокумент17 страницEv - Bit - S FinalPrabhuОценок пока нет
- 10 0 Driveline Dynamics NotesДокумент19 страниц10 0 Driveline Dynamics NotessafaozhanОценок пока нет
- OTM 364 Elektrikli Ve Hibrit TaşıtlarДокумент116 страницOTM 364 Elektrikli Ve Hibrit TaşıtlarEspri FuuОценок пока нет
- Mathematical Modeling of The Electric Drive Train of The Sports CarДокумент10 страницMathematical Modeling of The Electric Drive Train of The Sports CarJuraj MadarásОценок пока нет
- Introduction To BasicsДокумент3 страницыIntroduction To Basicskarthikeyan1076Оценок пока нет
- Performance Characteristics of Road Vehicles 2Документ108 страницPerformance Characteristics of Road Vehicles 2DEEPSОценок пока нет
- Electric Vehicle 2nd ModuleДокумент22 страницыElectric Vehicle 2nd ModuleAmruth DeshpandeОценок пока нет
- Bma4723 Vehicle Dynamics Chap 22Документ35 страницBma4723 Vehicle Dynamics Chap 22Fu HongОценок пока нет
- FPBJ-2012 CVT 2012 Farkas Piros Full TextДокумент10 страницFPBJ-2012 CVT 2012 Farkas Piros Full TextPiros AttilaОценок пока нет
- Motor CalcДокумент8 страницMotor CalcSupriyo SajaОценок пока нет
- Crank Effort DiagramsДокумент4 страницыCrank Effort DiagramsDirajen PMОценок пока нет
- Typical NotesДокумент13 страницTypical NotesDevang TripathiОценок пока нет
- Man GN PDF 6Документ36 страницMan GN PDF 6Adrian A UPD78% (9)
- Motorsport Engine & Vehicle Technology 2, Assignment 1Документ6 страницMotorsport Engine & Vehicle Technology 2, Assignment 1Al LockeОценок пока нет
- Lesson 4Документ36 страницLesson 4Ali MadridОценок пока нет
- Engine Report Sriwantha PDFДокумент14 страницEngine Report Sriwantha PDFSriwantha HewageОценок пока нет
- Module 5 Assignment 1 2Документ3 страницыModule 5 Assignment 1 2sanjeev.rajoriaОценок пока нет
- Chap. 2 - Acceleration Braking PerformanceДокумент33 страницыChap. 2 - Acceleration Braking PerformanceWARRIOR GAMINGОценок пока нет
- Engine Terms DefinitionsДокумент7 страницEngine Terms DefinitionsAnanth S KAmathОценок пока нет
- Report Assignment 1Документ11 страницReport Assignment 1arcana1988Оценок пока нет
- Formation of Driving Torque of Engine Inthe Technological Transport Machine With Multiphase Injection of FuelДокумент10 страницFormation of Driving Torque of Engine Inthe Technological Transport Machine With Multiphase Injection of FuelTJPRC PublicationsОценок пока нет
- DC Motor CalculationsДокумент10 страницDC Motor Calculationsoctav12Оценок пока нет
- Experiment No 6 by Arun (1408131017) - 2Документ6 страницExperiment No 6 by Arun (1408131017) - 2arunОценок пока нет
- 3-Engine Dynamic PropertiesДокумент29 страниц3-Engine Dynamic PropertiesHiếu Đình NguyễnОценок пока нет
- Gear RatiosДокумент10 страницGear RatiosYouMineОценок пока нет
- 1 Agricultural-TractorДокумент47 страниц1 Agricultural-TractorHaniya Mamaw100% (1)
- IC EnginesДокумент7 страницIC EnginesAmmar TahirОценок пока нет
- Acta Technica Napocensis: Algorithm For Designing The Saw Diagram For VehiclesДокумент6 страницActa Technica Napocensis: Algorithm For Designing The Saw Diagram For Vehiclesgoita94Оценок пока нет
- 90 Days To LifeДокумент16 страниц90 Days To Lifeabhinavanish14Оценок пока нет
- Report About Shell Eco-Marathon Cars EnginesДокумент11 страницReport About Shell Eco-Marathon Cars EnginesIbrahimEssamОценок пока нет
- T M D F: Urning Oment Iagrams AND LywheelДокумент21 страницаT M D F: Urning Oment Iagrams AND LywheelAmandeep Singh Bansal100% (1)
- Engine Torque and Traction Force: Association AdilcaДокумент13 страницEngine Torque and Traction Force: Association AdilcaManicharanОценок пока нет
- Abstract:: Key Word: Induction Motor, EfficiencyДокумент6 страницAbstract:: Key Word: Induction Motor, Efficiencysrinivasan_smartОценок пока нет
- Engine Torque and Traction Force: Association AdilcaДокумент13 страницEngine Torque and Traction Force: Association Adilcavodoochild_Ar80Оценок пока нет
- Theory of AutomotiveДокумент9 страницTheory of AutomotivePhuc NguyenОценок пока нет
- Power Train MatchingДокумент43 страницыPower Train MatchingMerrelОценок пока нет
- Best Method To Balance Torque Loadings On A Pumping Unit GearboxДокумент11 страницBest Method To Balance Torque Loadings On A Pumping Unit GearboxNiurkarisОценок пока нет
- Flywheel & TMDДокумент42 страницыFlywheel & TMDu1909030Оценок пока нет
- Hev M4Документ13 страницHev M4Anandhu AОценок пока нет
- Dimensions of Cardan ShaftsДокумент11 страницDimensions of Cardan ShaftsAnirban GhoshОценок пока нет
- Project Brief: RMIT University Vietnam - School of Science and TechnologyДокумент6 страницProject Brief: RMIT University Vietnam - School of Science and TechnologyMinh NguyễnОценок пока нет
- Engine Design and Operating ParametersДокумент26 страницEngine Design and Operating Parametersishanv_1430% (1)
- Maximum Engine Force Per Gear As Function of Vehicle Speed. This Particular Engine Has A Torque Limit of 400Nm and A Power Limit of 280hpДокумент4 страницыMaximum Engine Force Per Gear As Function of Vehicle Speed. This Particular Engine Has A Torque Limit of 400Nm and A Power Limit of 280hpNIKASH maniОценок пока нет
- Motor CalculationsДокумент8 страницMotor CalculationssmhbОценок пока нет
- PPD Week 5.1 LectureДокумент28 страницPPD Week 5.1 LectureMaster CalculusОценок пока нет
- Short TeramДокумент29 страницShort TeramPankaj KumarОценок пока нет
- Motor Load and Efficiency PDFДокумент16 страницMotor Load and Efficiency PDFwfjerrОценок пока нет
- Determining Electric Motor Load and Efficiency: F A C T S H E E TДокумент16 страницDetermining Electric Motor Load and Efficiency: F A C T S H E E TwahonotОценок пока нет
- Farm Machinery - Tractors - A Collection of Articles on the Operation, Mechanics and Maintenance of TractorsОт EverandFarm Machinery - Tractors - A Collection of Articles on the Operation, Mechanics and Maintenance of TractorsОценок пока нет
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkОт EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkОценок пока нет
- Southern Marine Engineering Desk Reference: Second Edition Volume IiОт EverandSouthern Marine Engineering Desk Reference: Second Edition Volume IiОценок пока нет
- Control of DC Motor Using Different Control StrategiesОт EverandControl of DC Motor Using Different Control StrategiesОценок пока нет
- Shree New Price List 2016-17Документ13 страницShree New Price List 2016-17ontimeОценок пока нет
- Tugas Dikumpulkan Pada Hari Sabtu, 11 April 2020. Apabila Email Bermasalah Dapat Mengirimkan Via WA PribadiДокумент4 страницыTugas Dikumpulkan Pada Hari Sabtu, 11 April 2020. Apabila Email Bermasalah Dapat Mengirimkan Via WA PribadiFebry SugiantaraОценок пока нет
- Cargo ManagementДокумент45 страницCargo ManagementShubham Chaurasia75% (8)
- Goldhofer FTV 850 BrochureДокумент2 страницыGoldhofer FTV 850 BrochureMauroОценок пока нет
- Effects of Climate ChangeДокумент3 страницыEffects of Climate Changejiofjij100% (1)
- Oil Whirl and Whip Instabilities - Within Journal BearingsДокумент27 страницOil Whirl and Whip Instabilities - Within Journal BearingsTalha AamirОценок пока нет
- Esteem 1999 2000 1.3L 1.6LДокумент45 страницEsteem 1999 2000 1.3L 1.6LArnold Hernández CarvajalОценок пока нет
- MarbiehistoryДокумент6 страницMarbiehistoryMarbie DalanginОценок пока нет
- Worksheet Series 5: Answer Any 3 Questions From 1 To 6. (2 Score Each)Документ6 страницWorksheet Series 5: Answer Any 3 Questions From 1 To 6. (2 Score Each)AswithОценок пока нет
- Innerwear Industry Pitch PresentationДокумент19 страницInnerwear Industry Pitch PresentationRupeshKumarОценок пока нет
- Socialized HousingДокумент48 страницSocialized HousingJessieReiVicedoОценок пока нет
- Drilling & GroutingДокумент18 страницDrilling & GroutingSantosh Laxman PatilОценок пока нет
- 2022 Audi e Tron 22Документ318 страниц2022 Audi e Tron 22Alejandro Alberto Robalino MendezОценок пока нет
- EPCC Hydrocarbon Downstream L&T 09.01.2014Документ49 страницEPCC Hydrocarbon Downstream L&T 09.01.2014shyaminannnaОценок пока нет
- Electrowetting - Wikipedia, The Free EncyclopediaДокумент5 страницElectrowetting - Wikipedia, The Free EncyclopediaDwane AlmeidaОценок пока нет
- Fundamentals of Pain Medicine: Jianguo Cheng Richard W. RosenquistДокумент346 страницFundamentals of Pain Medicine: Jianguo Cheng Richard W. RosenquistMayОценок пока нет
- SCM (Subway Project Report)Документ13 страницSCM (Subway Project Report)Beast aОценок пока нет
- 1962 Gibson Johnny SmithДокумент5 страниц1962 Gibson Johnny SmithLuisОценок пока нет
- GCSE AstronomyДокумент30 страницGCSE Astronomyharris123mc100% (1)
- Impact of Retrofitting Existing Combined Heat and Power Plant With Polygeneration of Biomethane PDFДокумент16 страницImpact of Retrofitting Existing Combined Heat and Power Plant With Polygeneration of Biomethane PDFAwais Salman0% (1)
- 1762 Ob8 PDFДокумент16 страниц1762 Ob8 PDFRodríguez EdwardОценок пока нет
- Biomedical Engineering Handbook Revised 5 2015Документ37 страницBiomedical Engineering Handbook Revised 5 2015Teja GuttiОценок пока нет
- Owner'S Manual: 2023 Chassis CabДокумент444 страницыOwner'S Manual: 2023 Chassis CabDmitry DimasОценок пока нет
- Murata High Voltage CeramicДокумент38 страницMurata High Voltage CeramictycristinaОценок пока нет
- Ham Radio Balu N ManualДокумент7 страницHam Radio Balu N Manualcolinbeeforth100% (1)
- Material Specification - 077154C-000-JSS-1700-009 - DДокумент13 страницMaterial Specification - 077154C-000-JSS-1700-009 - DStructures ProductionОценок пока нет
- Extract From The Painted Door' by Sinclair RossДокумент2 страницыExtract From The Painted Door' by Sinclair RosssajifisaОценок пока нет
- 3rd Quarter Exam (Statistics)Документ4 страницы3rd Quarter Exam (Statistics)JERALD MONJUANОценок пока нет
- Save Water SpeechДокумент4 страницыSave Water SpeechHari Prakash Shukla0% (1)
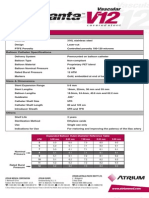
- Advanta V12 Data SheetДокумент2 страницыAdvanta V12 Data SheetJuliana MiyagiОценок пока нет