Академический Документы
Профессиональный Документы
Культура Документы
Medio Lugar de Raiz
Загружено:
Manuel Camargo GómezАвторское право
Доступные форматы
Поделиться этим документом
Поделиться или встроить документ
Этот документ был вам полезен?
Это неприемлемый материал?
Пожаловаться на этот документАвторское право:
Доступные форматы
Medio Lugar de Raiz
Загружено:
Manuel Camargo GómezАвторское право:
Доступные форматы
Sistemas de Control Feedback
Antonio Flores T. Departmento de Ciencias Universidad Iberoamericana Prolongacin Paseo de la Reforma 880 o Mxico DF, 01210, MEXICO e June 12, 2000
Introduccin o
Algunas de las ideas bsicas en el diseo de sistemas de control feedback pueden ejema n plicarse usando el siguiente CSTR:
Q T C Ao
C A
AC
Figura 1: CSTR con controlador feedback.
E-mail: antonio.ores@uia.mx, http://kaos.dci.uia.mx, phone/fax: (+52)5 2674279
donde supongamos que la concentracin del reactivo A se controla manipulando el ujo o volumtrico alimentado al reactor. En la conguracin anterior podemos distinguir los e o siguientes componentes: Una variable de salida (CA ) que se mide continuamente. Una variable que se manipula (Q) para lograr un objetivo deseado. Algunas variables (T, CAo ) consideradas como perturbaciones al proceso. Un sistema de control (denotado por AC) cuyo objetivo es mantener al proceso operando en la forma deseada. A la operacin conjunta del proceso y del controlador se le llama el sistema de control. o En particular el sistema de control mostrado en la gura 1 se denomina sistema de control feedback (o de retroalimentacin) en virtud de que los valores medidos de CA se o usan (o retroalimentan) por el controlador para ejecutar una cierta accin de control. o El sistema de control se dice que opera a lazo cerrado ya que la informacin uye de o la planta al controlador y de este de regreso a la planta repitiendose este ciclo varias veces.
Representacin de un sistema de control en trminos o e de diagramas de bloques
El sistema de control feedback se puede representar de manera ms esquemtica en a a trminos de diagramas de bloques: e
d Gd y + d e y m Gs c u + + y
Gc
Gv
Gp
donde Gv es la funcin de transferencia del elemento nal de control (normalmente es o una vlvula de control), y Gs es la funcin de transferencia del sensor. Normalmente se a o acostumbra suponer que las constantes de tiempo de la vlvula de control y del sensor a 2
son muy pequeos (en comparacin con las constantes de tiempo del controlador, planta n o y perturbaciones) de forma que su respuesta es inmediata. Esto signica que: Gv = 1 Gs = 1 y el diagrama de bloques se reduce a:
d Gd y + d e u + + y
Gc
Gp
Figura 2: Sistema de control a lazo cerrado.
de este diagrama de bloques debe notarse que: El sumador obtiene la seal de error: e = yd y que representa la desviacin que ocurre entre n o el valor deseado de la variable de salida (yd ) y el valor medido de dicha variable (y). El sumador
d Gd u + + y
Gp
representa el efecto combinado (aditivo en este caso ya que estamos trabajando con sistemas lineales) de la respuesta de la planta a una accin de control (dada o por el producto Gp u) y del efecto de una perturbacin sobre la respuesta del o sistema. 3
Tipos de controladores feedback ms comunes a
Entre los tipos ms comunes de controladores (tambin llamados leyes de control) a e usados podemos citar los siguientes (los cuales tambin son los ms usados industriale a mente): Proporcional (P). u(t) = Kc e(t) o bien, u(t) = us + Kc e(t) (3.2) (3.1)
donde us es el valor de la variable manipulada cuando el error e(t) es cero. Kc se denomina la ganancia del controlador. En el dominio de Laplace la ecuacin 3.1 o se escribe como: u(s) = Kc e(s) (3.3)
por lo tanto la funcin de transferencia del controlador proporcional est dada o a por: Gc (s) = Kc Proporcional+Integral (PI). u(t) = Kc e(t) + 1 I
t 0
(3.4)
e(t)dt
(3.5)
o bien en el dominio de Laplace: u(s) = Kc e(s) + 1 e(s) I s (3.6)
por lo que la funcin de transferencia de este controlador est dada por: o a G c = Kc 1 + 1 I s (3.7)
donde I se llama el tiempo integral del controlador. 4
Proporcional+Integral+Derivativo (PID). u(t) = Kc e(t) + 1 I
t 0
e(t)dt +
de(t) dt
(3.8)
o bien en el dominio de Laplace: u(s) = Kc e(s) + 1 e(s) + D s I s (3.9)
por lo que la funcin de transferencia de este controlador est dada por: o a G c = Kc 1 + 1 + D s I s (3.10)
donde D se llama el tiempo derivativo del controlador.
Efecto del tipo de controlador sobre la respuesta dinmica de un sistema de primer orden a
En esta seccin analizaremos las diferencias en respuesta dinmica de un sistema de o a primer orden sin retardo: Gp = K s + 1 (4.11)
usando los tipos de controladores mencionados antes. Analizaremos los casos de seguimiento de seales (tambin llamados problemas de control servo), y de rechazo de pertuban e ciones (tambin conocido como problemas de control regulatorio). Para este propsito e o la funciones de transferencia a lazo abierto son (ver gura 2): Servo. y(s) Gp Gc = yd (s) 1 + Gp Gc Regulatorio. Gd y(s) = yd (s) 1 + Gp Gc (4.13) (4.12)
1. Control proporcional. 5
Servo. o o Sustituyendo Gp de la ecuacin 4.11 y Gc de la ecuacin 3.4 tenemos: Kc sK y(s) +1 = yd (s) 1 + Kc sK +1 despus de un poco de algebra: e K y(s) = yd (s) s + 1 donde, K = Kc K Kc K + 1 = Kc K + 1 (4.16) (4.17) (4.15) (4.14)
o en el dominio del tiempo:
y(t) = K(1 et/ )
(4.18)
resulta interesante notar que un sistema representado por una funcin de o transferencia de primer orden sujeto a control proporcional responde exactamente en la forma de un sistema de primer orden (ver ecuacin 4.15). o i) La velocidad a la que responde el sistema de control estar determinado a por la constante de tiempo de lazo cerrado (). Para un sistema dado dicha constante depende slo de la ganancia del controlador (Kc ). o ii) De la ecuacin 4.17 observamos que se puede acelerar (dentro de ciertos o l mites) la velocidad de respuesta usando ganancias ms grandes. a iii) En relacin al valor nal (despus que ha transcurrido un tiempo muy o e grande) que toma la variable controlada observese que esta puede determinarse haciendo t inf en la ecuacin 4.18): o y(t) = K (4.19)
o si suponemos que la entrada al sistema de control (yd ) se cambi en una unidad usando una perturbacin de tipo paso (o sea yd =1), esto o signica que el valor deseado para y(t) es de 1 (recuerdese que tanto y como yd estn expresadas como variables de desviacin). Sin embargo, a o observamos de la ecuacin 4.16 que: o y(t) = 1 6 (4.20)
1 y
valor deseado
offset incremento de Kc
0 t
excepto en el caso de usar valores extremadamente grandes de la ganancia del controlador (el cual an cuando en teria puede ser resultar u o vlido, en la prctica no pueden usarse valores demasiado grandes de la a a ganacia del controlador debido a limitaciones f sicas en las vlvulas de a control). Esta situacin se ilustra en la siguiente grca: o a a la diferencia entre el valor deseado y el valor nal (o en estado estacionario) obtenido por el sistema de control se denomina oset (o error en estado estacionario). Regulatorio. Suponiendo que la funcin de transferencia de la perturbacin sea de primer o o orden: Kd Gd = (4.21) d s + 1 sustituyendo Gd , Gc y Gp en la ecuacin 4.13: o Kd dK y(s) +1 = yd (s) 1 + Kc sK +1 (4.22)
para propsitos de simplicar clculos supongamos que d = , entonces: o a K y(s) = yd (s) s + 1 donde, K = Kd Kc K + 1 = Kc K + 1 7 (4.24) (4.25) (4.23)
o en el dominio del tiempo:
y(t) = K(1 et/ )
(4.26)
de nuevo observamos que la respuesta de un sistema de primer orden, usando control proporcional, sujeto a una perturbacin de tipo escaln, es tambin o o e de primer orden. Supongamos que el tipo de control se sujeta a una perturbacin unitaria de o tipo escaln en d. La respuesta nal (es decir, cuando se halla alcanzado el o estado estacionario) estar dada por: a y(t) = k cuando analizamos el caso regulatorio nos interesa que : y(t) = 0 (4.28) (4.27)
es decir, que el sistema permanezca operando en el set-point deseado an u en presencia de perturbaciones. Para lograr este objetivo se requiere que: K=0 (4.29)
lo cual podr conseguirse usando Kc (ver ecuacin 4.24). Esto es del a o todo imprctico ya que no se pueden usar en procesos reales valores innitos a de la ganancia del controlador. En forma grca: a
1 y Kc aumenta
offset
0 t
por lo tanto en este caso tambin tenemos oest presente. e 8
2. Control proporcional+integral. Servo.
1 Kc 1 + I s y(s) = 1 yd (s) 1 + Kc 1 + I s K s+1 K s+1
(4.30)
despus de un poco de algebra: e KKc (I s + 1) y(s) = 2 + ( + KK )s + KK yd (s) I s I c I c (4.31)
i) La respuesta dinmica de un sistema de primer orden sujeta a control a PI es de segundo orden. ii) El controlador PI introduce un polo y un cero al sistema a lazo cerrado. iii) La presencia del cero puede cauzar conducta oscilatoria. Notese adems a que el cero introducido es negativo. iv) La respuesta del sistema de control en estado estacionario puede obtenerse haciendo s 0 (lo cual es equivalente a hacer t en el dominio del tiempo). De la ecuacin 4.31 tenemos: o s0
lim
y =1 yd
(4.32)
por lo tanto en presencia de un cambio unitario de tipo escaln en el o set-point (o sea yd = 1), el sistema de control no exhibe oset usando un controlador PI.
El mtodo del lugar de las raices e
Uno de los mtodos ms simples para el diseo de controladores propore a n cionales es, el as llamado, mtodo del lugar de las raices (root locus). El e diagram de bloques para un sistema de control de este tipo es como se muestra en la gura 3. En esta gura Kc representa la ganancia del controlador. La funcin de transferencia del problema servo est dada por: o a y(s) Kc Gp = yd (s) 1 + Kc Gp
(5.33)
recuerdese que el sistema de control ser estable slo si la parte real de las a o raices de la ecuacin carater o stica: 1 + Kc G p = 0 9 (5.34)
Вам также может понравиться
- DECANTER NX418 Spare Parts ManualДокумент52 страницыDECANTER NX418 Spare Parts Manualnpm1975100% (1)
- Calculo Apunte EngranajeДокумент5 страницCalculo Apunte Engranajenpm1975Оценок пока нет
- Cambios Territoriales de ColombiaДокумент2 страницыCambios Territoriales de Colombianpm1975100% (1)
- Salamandra 2Документ16 страницSalamandra 2npm1975Оценок пока нет
- Instrucciones EspañolДокумент2 страницыInstrucciones Españolnpm1975Оценок пока нет
- Leeme Antes de Instalar Hysys 8Документ1 страницаLeeme Antes de Instalar Hysys 8npm1975Оценок пока нет
- Funciones DERIVEДокумент4 страницыFunciones DERIVEnpm1975Оценок пока нет
- Manual SC Akx77Документ24 страницыManual SC Akx77Robert HarveyОценок пока нет
- DofaДокумент5 страницDofanpm1975Оценок пока нет
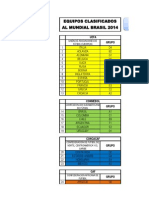
- Mundial Brasil 2014 Excel CompletoДокумент41 страницаMundial Brasil 2014 Excel Completonpm1975Оценок пока нет