Вам также может понравиться
- EXP4Документ11 страницEXP4bangi arfatОценок пока нет
- Memory Management Guide (1106)Документ9 страницMemory Management Guide (1106)roohmadi9430Оценок пока нет
- Virtual Memory: Operating System RAMДокумент13 страницVirtual Memory: Operating System RAMSugapriya SubramaniОценок пока нет
- Comparison of Memory Management of Windows With LINUXДокумент10 страницComparison of Memory Management of Windows With LINUXManmeet Rajput83% (6)
- National Institute of Technology, Durgapur: Submitted By: Vipin Saharia (10/MCA/11) Submitted To: Prof. P. ChaudharyДокумент18 страницNational Institute of Technology, Durgapur: Submitted By: Vipin Saharia (10/MCA/11) Submitted To: Prof. P. ChaudharyRahul RaushanОценок пока нет
- Anatomy of A Program in MemoryДокумент19 страницAnatomy of A Program in MemoryVictor J. PerniaОценок пока нет
- Lovely Professional University: Computer Organization and ArchitectureДокумент7 страницLovely Professional University: Computer Organization and ArchitectureYogesh Verma YogiОценок пока нет
- Anatomy of A Program in Memory - Gustavo DuarteДокумент41 страницаAnatomy of A Program in Memory - Gustavo DuarteRigs JuarezОценок пока нет
- Anatomy of A Program in MemoryДокумент5 страницAnatomy of A Program in Memorythong_bvtОценок пока нет
- Computer Organization and Architecture Unit MemoryДокумент22 страницыComputer Organization and Architecture Unit MemoryKUNAL YADAVОценок пока нет
- 3.1. Operating System - Memory ManagementДокумент9 страниц3.1. Operating System - Memory ManagementBulbula KumedaОценок пока нет
- Research Paper On Virtual Memory in Operating SystemДокумент7 страницResearch Paper On Virtual Memory in Operating Systemtxdpmcbkf100% (1)
- Lecture 7 8405 Computer ArchitectureДокумент7 страницLecture 7 8405 Computer ArchitecturebokadashОценок пока нет
- Research Paper On Virtual MemoryДокумент4 страницыResearch Paper On Virtual Memorygw060qpy100% (1)
- Windows Memory ManagementДокумент98 страницWindows Memory ManagementSharon KarkadaОценок пока нет
- Virtual MemoryДокумент8 страницVirtual MemoryWeng HuiОценок пока нет
- Memory ManagementДокумент6 страницMemory ManagementAgung PambudiОценок пока нет
- Part 1B, DR S.W. MooreДокумент16 страницPart 1B, DR S.W. MooreElliottRosenthal100% (3)
- Windows Memory ManagementДокумент11 страницWindows Memory ManagementbetahitaОценок пока нет
- Business Process: What Is Virtual Memory?Документ3 страницыBusiness Process: What Is Virtual Memory?Rajesh SahaОценок пока нет
- Unix and C/C++ Runtime Memory Management For Programmers: Excellent Site That Contains Notes About Memory ManagementДокумент41 страницаUnix and C/C++ Runtime Memory Management For Programmers: Excellent Site That Contains Notes About Memory ManagementLe Vo Xuan TruongОценок пока нет
- Windows Memory ManagementДокумент31 страницаWindows Memory ManagementTech_MXОценок пока нет
- Coa BlogДокумент17 страницCoa BlogA Zizi ZiziОценок пока нет
- Contiguous Memory AllocationmeanДокумент7 страницContiguous Memory AllocationmeananitaОценок пока нет
- More Than 4GB of Memory in A 32-Bit Windows ProcessДокумент12 страницMore Than 4GB of Memory in A 32-Bit Windows ProcessscriberoneОценок пока нет
- Memory Management (Platform Technologies)Документ43 страницыMemory Management (Platform Technologies)Luigi SeriñaОценок пока нет
- Memory Management: 3.1 An Abstract Model of Virtual MemoryДокумент18 страницMemory Management: 3.1 An Abstract Model of Virtual MemoryGaurav GuptaОценок пока нет
- OS Assignments 3Документ5 страницOS Assignments 3humairanaz0% (1)
- CH 08Документ8 страницCH 08kapil_arpitaОценок пока нет
- Virtual MemoryДокумент7 страницVirtual Memorydevank1505Оценок пока нет
- Os Memory ManagementДокумент6 страницOs Memory ManagementMd Omar FaruqОценок пока нет
- Unit 4 - Operating System - WWW - Rgpvnotes.in PDFДокумент16 страницUnit 4 - Operating System - WWW - Rgpvnotes.in PDFPrakrti MankarОценок пока нет
- Virtual Memory Can Slow Down PerformanceДокумент5 страницVirtual Memory Can Slow Down PerformanceSiddarthModiОценок пока нет
- Why Is There A Need For Virtual Memory?: R: ET/COE/ND/19/003 Cousre: Cte 214 D: 6 S 2021Документ4 страницыWhy Is There A Need For Virtual Memory?: R: ET/COE/ND/19/003 Cousre: Cte 214 D: 6 S 2021JosephishakuОценок пока нет
- Os Assignment PrefiДокумент2 страницыOs Assignment PrefiJosielyn TarsОценок пока нет
- Virtual MemoryДокумент13 страницVirtual MemoryHira KhyzerОценок пока нет
- Lee, Jennefer Brazil OS Paging and Segmentation IT22S3-CITE 203 05/19/2022Документ9 страницLee, Jennefer Brazil OS Paging and Segmentation IT22S3-CITE 203 05/19/2022JENNEFER LEEОценок пока нет
- Memory Management: Show Frames No FramesДокумент19 страницMemory Management: Show Frames No FramesmpkkbtechОценок пока нет
- What Is Page Thrashing?Документ4 страницыWhat Is Page Thrashing?Karthik KartzОценок пока нет
- Os Assignment 3 AnsДокумент25 страницOs Assignment 3 AnsMuktha KrishnaОценок пока нет
- Operating Systems: Some Q & AДокумент8 страницOperating Systems: Some Q & AMaham M. FirdousОценок пока нет
- Virtual MemoryДокумент6 страницVirtual MemoryamalsyihanОценок пока нет
- LEC78 Mem MGTДокумент32 страницыLEC78 Mem MGTpaul mulwaОценок пока нет
- Unit 3Документ8 страницUnit 3Tejas DixitОценок пока нет
- Informacion Extraida De: Chapter 3 Protected Mode Memory ManagementДокумент8 страницInformacion Extraida De: Chapter 3 Protected Mode Memory ManagementKillua ZaoldyeckОценок пока нет
- Process Address Space: Memory ManagementДокумент17 страницProcess Address Space: Memory ManagementMohit SainiОценок пока нет
- Virtual Memory and Memory Management Requirement: Presented By: Ankit Sharma Nitesh Pandey Manish KumarДокумент32 страницыVirtual Memory and Memory Management Requirement: Presented By: Ankit Sharma Nitesh Pandey Manish KumarAnkit SinghОценок пока нет
- Operating System Which Made by MicrosoftДокумент2 страницыOperating System Which Made by MicrosoftArchie CuyacotОценок пока нет
- Virtual Memory (Computer Operating System)Документ44 страницыVirtual Memory (Computer Operating System)Umera Anjum100% (1)
- Additional Course Material: Computer BasicsДокумент9 страницAdditional Course Material: Computer BasicskaviatchennaiОценок пока нет
- PagingДокумент2 страницыPagingMausam PokhrelОценок пока нет
- Operating System - Memory Management: Process Address SpaceДокумент21 страницаOperating System - Memory Management: Process Address SpaceMamathaОценок пока нет
- OS Ss1&2alex - Od (Copy)Документ1 страницаOS Ss1&2alex - Od (Copy)Mehari TemesgenОценок пока нет
- Objectives: Johannes Plachy IT Services & Solutions © 1998,1999 Jplachy@jps - atДокумент35 страницObjectives: Johannes Plachy IT Services & Solutions © 1998,1999 Jplachy@jps - atwidgetdogОценок пока нет
- Module 7 Memory ManagementДокумент7 страницModule 7 Memory ManagementnatsuОценок пока нет
- Case Memory LeakageДокумент12 страницCase Memory LeakagehsnelОценок пока нет
- Virtual Memory Paging 2.2.6Документ7 страницVirtual Memory Paging 2.2.6Raman Ray 105Оценок пока нет
- SAS Programming Guidelines Interview Questions You'll Most Likely Be AskedОт EverandSAS Programming Guidelines Interview Questions You'll Most Likely Be AskedОценок пока нет
- Unit 2 FinalДокумент46 страницUnit 2 Finalapi-27259648Оценок пока нет
- PentiumДокумент1 страницаPentiumapi-27259648Оценок пока нет
- To Whom It May ConcernДокумент1 страницаTo Whom It May Concernapi-27259648Оценок пока нет
- Campus Data Format HCL - xlsMCAДокумент2 страницыCampus Data Format HCL - xlsMCAapi-27259648Оценок пока нет
- Intel 80186 Pin OutДокумент20 страницIntel 80186 Pin OutGarotinho Latino AmericanoОценок пока нет
- CA-no Standing ArrearДокумент2 страницыCA-no Standing Arrearapi-27259648Оценок пока нет
- Programmable Keyboard-Display Interface - 8279Документ4 страницыProgrammable Keyboard-Display Interface - 8279api-27259648100% (2)
- Creating Night EffectsДокумент5 страницCreating Night Effectsapi-27259648Оценок пока нет
- Flash MaskДокумент1 страницаFlash Maskapi-27259648Оценок пока нет
- CTS Topper Shopper MCAДокумент1 страницаCTS Topper Shopper MCAapi-27259648Оценок пока нет
- FlashДокумент9 страницFlashapi-27259648100% (1)
- Unix 4 and 5Документ46 страницUnix 4 and 5api-27259648Оценок пока нет
- Greenhouse Effect2Документ8 страницGreenhouse Effect2api-27259648Оценок пока нет
- Chap 1Документ32 страницыChap 1api-27259648Оценок пока нет
- Chap 7Документ71 страницаChap 7api-27259648Оценок пока нет
- Time Table-AДокумент2 страницыTime Table-Aapi-27259648Оценок пока нет
- Chap 6Документ77 страницChap 6api-27259648Оценок пока нет
- Chap 3Документ55 страницChap 3api-27259648Оценок пока нет
- "Association Rules": Market Baskets Frequent Itemsets A-Priori AlgorithmДокумент30 страниц"Association Rules": Market Baskets Frequent Itemsets A-Priori Algorithmapi-27259648Оценок пока нет
- Appendix AДокумент21 страницаAppendix Aapi-27259648Оценок пока нет
- Hotter DryerДокумент27 страницHotter Dryerapi-27259648Оценок пока нет
- USA Comparison5Документ30 страницUSA Comparison5api-27259648Оценок пока нет
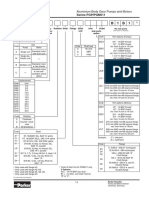
- PG 511 B 1 B 1: Ordering Code Series PGP/PGM511Документ7 страницPG 511 B 1 B 1: Ordering Code Series PGP/PGM511Four SticksОценок пока нет
- Coal Combustion Monitoring Report Unwashed Semi Rev02 08.24.2021Документ17 страницCoal Combustion Monitoring Report Unwashed Semi Rev02 08.24.2021Keith Danae SuquibОценок пока нет
- Topic 6 ESD & EMI Considerations Electrostatic Sensitive Devices (M4.2, 5.12 &5.14) - 1Документ49 страницTopic 6 ESD & EMI Considerations Electrostatic Sensitive Devices (M4.2, 5.12 &5.14) - 1BeaglelalahahaОценок пока нет
- Teradata Installation: Installation Steps For WindowsДокумент4 страницыTeradata Installation: Installation Steps For WindowsjupudiguptaОценок пока нет
- U042en PDFДокумент12 страницU042en PDFTatiya TatiyasoponОценок пока нет
- Stock # Carbon Weight Burn Temp Puncture StrengthДокумент8 страницStock # Carbon Weight Burn Temp Puncture StrengthMintОценок пока нет
- Vibration - Electrical or Mechanical - EASAДокумент3 страницыVibration - Electrical or Mechanical - EASAGilbОценок пока нет
- Antikythera MechanismДокумент25 страницAntikythera MechanismchetansergiurazvanОценок пока нет
- VLE Lactic Acid Ethyl Lactate Esterification PDFДокумент7 страницVLE Lactic Acid Ethyl Lactate Esterification PDFAseem Kashyap0% (1)
- Justine J. Beroy: Career ObjectivesДокумент5 страницJustine J. Beroy: Career ObjectivesJustine BeroyОценок пока нет
- 2019 All PDFДокумент27 страниц2019 All PDFvishesh bhatiaОценок пока нет
- Cache MemoryДокумент20 страницCache MemoryKeshav Bharadwaj RОценок пока нет
- 007-013558-001 SAS PCE SPE With Support For HSM PSE2 Integration Feature Documentation RevCДокумент43 страницы007-013558-001 SAS PCE SPE With Support For HSM PSE2 Integration Feature Documentation RevCpietoeОценок пока нет
- SMP Gateway SoftPLC Reference ManualДокумент47 страницSMP Gateway SoftPLC Reference Manualswalker948100% (1)
- HARGA REFERENSI B2S PapuaДокумент6 страницHARGA REFERENSI B2S PapuaAbiyoga AdhityaОценок пока нет
- How To Measure MTFДокумент64 страницыHow To Measure MTFamtcorporationОценок пока нет
- " " Reach: Ordering InformationДокумент8 страниц" " Reach: Ordering InformationTrong TranОценок пока нет
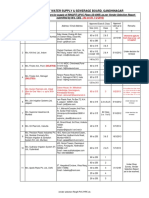
- GWSSB Vendor List 19.11.2013Документ18 страницGWSSB Vendor List 19.11.2013sivesh_rathiОценок пока нет
- Quality Assurance Plan (1) ..Документ5 страницQuality Assurance Plan (1) ..ARUNKUMARANNANBHEDAОценок пока нет
- Session 5 PDFДокумент26 страницSession 5 PDFToufic HageОценок пока нет
- Simatic EKB Install 2012-03-08Документ2 страницыSimatic EKB Install 2012-03-08Oton SilvaОценок пока нет
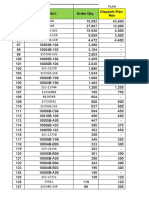
- Order Qty Vs Dispatch Plan - 04 11 20Документ13 страницOrder Qty Vs Dispatch Plan - 04 11 20NPD1 JAKAPОценок пока нет
- ChemCAD and ConcepSys AIChE Spring 09Документ28 страницChemCAD and ConcepSys AIChE Spring 09ConcepSys Solutions LLCОценок пока нет
- BIOS 203: Free Energy Methods Tom MarklandДокумент23 страницыBIOS 203: Free Energy Methods Tom MarklandNemanja ĐokovićОценок пока нет
- Jamesbury Polymer and Elastomer Selection GuideДокумент20 страницJamesbury Polymer and Elastomer Selection Guidesheldon1jay100% (1)
- BD+ CD+ XD+ - tcm833-3534072Документ20 страницBD+ CD+ XD+ - tcm833-3534072MisterMMОценок пока нет
- Distributed PowerДокумент3 страницыDistributed PowertibvalОценок пока нет
- IRF350Документ7 страницIRF350sanniviОценок пока нет
- MJ4502 High-Power PNP Silicon TransistorДокумент4 страницыMJ4502 High-Power PNP Silicon Transistorjoao victorОценок пока нет