Вам также может понравиться
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Transformer Method StatementДокумент13 страницTransformer Method StatementHareesh R IyerОценок пока нет
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- LM6 + 5% Graphite - Tension 3DДокумент4 страницыLM6 + 5% Graphite - Tension 3DHareesh R IyerОценок пока нет
- ERT & SRT Technology R0Документ4 страницыERT & SRT Technology R0Hareesh R IyerОценок пока нет
- Seminar Contents & Other ListsДокумент5 страницSeminar Contents & Other ListsHareesh R IyerОценок пока нет
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Analytic & Synthetic SurfacesДокумент12 страницAnalytic & Synthetic SurfacesHareesh R Iyer0% (1)
- Curve GenerationДокумент5 страницCurve GenerationHareesh R IyerОценок пока нет
- Simple Dam Break Analysis FLUENT SettingsДокумент7 страницSimple Dam Break Analysis FLUENT SettingsHareesh R IyerОценок пока нет
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
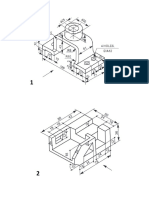
- 3D Cad Models For PracticeДокумент1 страница3D Cad Models For PracticeHareesh R IyerОценок пока нет
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Preprocessing: Defining The ProblemДокумент4 страницыPreprocessing: Defining The ProblemHareesh R IyerОценок пока нет
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Computer Aided Design & AnalysisДокумент7 страницComputer Aided Design & AnalysisHareesh R IyerОценок пока нет
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Dom 6M2 Cad Lab 6M2 Cad 6M1 Dom 6M2 Lab 6M1 Cad 6M2 Cad 6M1 Cad 6M2 Cad Lab 6M2 Proj M8 Dom 6M2Документ2 страницыDom 6M2 Cad Lab 6M2 Cad 6M1 Dom 6M2 Lab 6M1 Cad 6M2 Cad 6M1 Cad 6M2 Cad Lab 6M2 Proj M8 Dom 6M2Hareesh R IyerОценок пока нет
- Mon NM (3M1) Tue EGA (1R1) NM (3M2) Wed FEA (TS2) NM (3M2) Thu Thesis NM (3M1) Fri Fea (Ts2) / Thesis Thesis EGA (1E)Документ3 страницыMon NM (3M1) Tue EGA (1R1) NM (3M2) Wed FEA (TS2) NM (3M2) Thu Thesis NM (3M1) Fri Fea (Ts2) / Thesis Thesis EGA (1E)Hareesh R IyerОценок пока нет
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Composite Materials NotesДокумент9 страницComposite Materials NotesHareesh R IyerОценок пока нет
- Welding Processes PartIIДокумент34 страницыWelding Processes PartIIHandayani KesumadewiОценок пока нет
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- 3D MODEL - 1 Shaft SupportДокумент1 страница3D MODEL - 1 Shaft SupportHareesh R IyerОценок пока нет
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- Classification OF INTERNAL COMBUSTION ENGINE PDFДокумент65 страницClassification OF INTERNAL COMBUSTION ENGINE PDFProcy FerrerОценок пока нет
- Study On Control of Inverted Pendulum System Based On Simulink SimulationДокумент9 страницStudy On Control of Inverted Pendulum System Based On Simulink SimulationPriyanka KilaniyaОценок пока нет
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- Control of Inverted PendulumДокумент5 страницControl of Inverted PendulumAhmed HwaidiОценок пока нет
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Modern Control Systems - Short Suggestion-2 / NAME / BUETДокумент6 страницModern Control Systems - Short Suggestion-2 / NAME / BUETAshifur RahamanОценок пока нет
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Case Study (Balancing Robot)Документ10 страницCase Study (Balancing Robot)Homer Jay ManabatОценок пока нет
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Inverted Pendulum With MATLABДокумент26 страницInverted Pendulum With MATLABNofar GoferОценок пока нет
- Introduction To Real-Time Control SolutionДокумент15 страницIntroduction To Real-Time Control SolutionAcidОценок пока нет
- Upright PendulumДокумент36 страницUpright PendulumAndrewОценок пока нет
- Adaptive State Controller For Inverted Pendulum: Nenad Muškinja, Boris TovornikДокумент6 страницAdaptive State Controller For Inverted Pendulum: Nenad Muškinja, Boris TovornikNeagu AdrianОценок пока нет
- Sliding Mode Control of Inverted PenduluДокумент3 страницыSliding Mode Control of Inverted PendulumuzammalОценок пока нет
- Swing-Up Control of Inverted Pendulum: B.Tech Pre-Project PresentationДокумент16 страницSwing-Up Control of Inverted Pendulum: B.Tech Pre-Project PresentationDaniyal WahidОценок пока нет
- Inverted PendulumДокумент11 страницInverted PendulumVenkateshwaran AОценок пока нет
- Pendule InverséДокумент38 страницPendule InversésakridjОценок пока нет
- Design and Simulation of Two-Wheeled Balancing Mobile Robot With PID ControllerДокумент9 страницDesign and Simulation of Two-Wheeled Balancing Mobile Robot With PID ControllerHarish rajanОценок пока нет
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Swing-Up and Stabilization Control Design For An Underactuated Rotary Inverted Pendulum System Theory and ExperimentsДокумент10 страницSwing-Up and Stabilization Control Design For An Underactuated Rotary Inverted Pendulum System Theory and ExperimentsLÊ ĐẠI HIỆPОценок пока нет
- Inverted Pendulum - WikipediaДокумент9 страницInverted Pendulum - WikipediaDilan MadusankaОценок пока нет
- Cubli CDC13Документ6 страницCubli CDC13Denis Martins DantasОценок пока нет
- Controlling An Inverted Pendulum Using S PDFДокумент34 страницыControlling An Inverted Pendulum Using S PDFMiguel Angel ArruaОценок пока нет
- Quanser - IP01 and IP02 User ManualДокумент29 страницQuanser - IP01 and IP02 User ManualHygor ViegasОценок пока нет
- Self Balancing Two Wheeled RobotДокумент83 страницыSelf Balancing Two Wheeled RobotJoel SubhashОценок пока нет
- Inverted PendulumДокумент9 страницInverted PendulumMahmoud Samir MahmoudОценок пока нет
- Thesis Front AdaptiveДокумент11 страницThesis Front AdaptiveSunil KumarОценок пока нет
- Inverted PendulumДокумент6 страницInverted PendulumRandyHagenОценок пока нет
- 47-Control Instrumentation BrochureДокумент12 страниц47-Control Instrumentation BrochureFaizal Mohd SariОценок пока нет
- 33-005-PCI Datasheet DigitalPendulum MATLAB 10 2013Документ2 страницы33-005-PCI Datasheet DigitalPendulum MATLAB 10 2013AbdulHaseebArifОценок пока нет
- Balancing of An Inverted Pendulum Using PD Controller: June 2012Документ7 страницBalancing of An Inverted Pendulum Using PD Controller: June 2012doesntreallymatterОценок пока нет
- PID Control of Inverted Pendulum Using Adams and Matlab Co-SimulationДокумент4 страницыPID Control of Inverted Pendulum Using Adams and Matlab Co-SimulationEzequielBritosОценок пока нет
- LQG - LTR Controller Design Quanser Rotary Inverted PendulumДокумент6 страницLQG - LTR Controller Design Quanser Rotary Inverted PendulumGeovani BondoОценок пока нет
- Documentation For The Bytronic Pendulum Control System: (Version 2.1)Документ37 страницDocumentation For The Bytronic Pendulum Control System: (Version 2.1)Pedro Eusebio AlvaradoОценок пока нет