Вам также может понравиться
- Unit 5 Governors: StructureДокумент18 страницUnit 5 Governors: StructureenjpetОценок пока нет
- Variable Frequency Transformers for Large Scale Power Systems Interconnection: Theory and ApplicationsОт EverandVariable Frequency Transformers for Large Scale Power Systems Interconnection: Theory and ApplicationsРейтинг: 5 из 5 звезд5/5 (1)
- Dynamics of Machines: Assignment OnДокумент15 страницDynamics of Machines: Assignment OnRahulAgarwalОценок пока нет
- Power Electronics Applied to Industrial Systems and Transports, Volume 3: Switching Power SuppliesОт EverandPower Electronics Applied to Industrial Systems and Transports, Volume 3: Switching Power SuppliesОценок пока нет
- Governors: Types and OperationДокумент29 страницGovernors: Types and OperationSudhansuОценок пока нет
- Porter Governor Speed vs Load DisplacementДокумент16 страницPorter Governor Speed vs Load DisplacementShahir Afif Islam50% (2)
- GovernorsДокумент85 страницGovernorsrkrajesh86100% (2)
- Unit 4. GovernorsДокумент17 страницUnit 4. GovernorsMugisha OlivierОценок пока нет
- Lecture 5 - GovernorsДокумент53 страницыLecture 5 - GovernorsJamiza shenningОценок пока нет
- Theory of Machine GovernorДокумент16 страницTheory of Machine GovernorSourabh PradhanОценок пока нет
- Types - Centrifugal GovernorsДокумент3 страницыTypes - Centrifugal GovernorsPrabhu GОценок пока нет
- GovernorДокумент12 страницGovernorKunj RanaОценок пока нет
- Dom Lab Manual PDFДокумент27 страницDom Lab Manual PDFLogesh BabuОценок пока нет
- DOM Manual by OmДокумент23 страницыDOM Manual by OmDixit RohitОценок пока нет
- Chapter3 GovernorДокумент16 страницChapter3 GovernorBazli Faiq Zaini100% (1)
- GovernorsДокумент7 страницGovernorsSahilye GehaОценок пока нет
- What Is A Governor??: A Speed-Sensitive Device, Designed To Maintain A Constant Engine Speed Regardless of Load VariationДокумент24 страницыWhat Is A Governor??: A Speed-Sensitive Device, Designed To Maintain A Constant Engine Speed Regardless of Load VariationMudit JainОценок пока нет
- THEORY LabДокумент14 страницTHEORY LabuzairОценок пока нет
- DOM LabДокумент26 страницDOM LabatikmkaziОценок пока нет
- Governors For HNDE (Mech) - Labuduwa: 1. Watt GovernorДокумент12 страницGovernors For HNDE (Mech) - Labuduwa: 1. Watt Governors_nimalanОценок пока нет
- Dynamic Analysis of Engine Valvetrain and Its Effects On CamshaftДокумент5 страницDynamic Analysis of Engine Valvetrain and Its Effects On CamshaftIjsrnet EditorialОценок пока нет
- Governors: Centrifugal Governor, Also Known As The Watt or Fly-Ball GovernorДокумент3 страницыGovernors: Centrifugal Governor, Also Known As The Watt or Fly-Ball GovernorIqra Angels100% (1)
- Tom Chepter 6 Notes EngДокумент7 страницTom Chepter 6 Notes EngOjer KuskiwalaОценок пока нет
- Governors PPT - 1Документ24 страницыGovernors PPT - 1Bhukya Reethvik RathodОценок пока нет
- TOM - II Exp 1&2Документ9 страницTOM - II Exp 1&2RamОценок пока нет
- From Wikipedia, The Free Encyclopedia: Centrifugal GovernorДокумент6 страницFrom Wikipedia, The Free Encyclopedia: Centrifugal GovernorJamos R DonОценок пока нет
- Unit - 5Документ46 страницUnit - 5vivekselvan2Оценок пока нет
- Governors Apparatus ExplainedДокумент14 страницGovernors Apparatus ExplainedHimanshu Kulshrestha100% (1)
- Dynamics of Machinery: GovernorsДокумент11 страницDynamics of Machinery: GovernorsaОценок пока нет
- Governor StudentДокумент61 страницаGovernor Studentakshayupadhyay100% (1)
- The Velocity Control of The Electro-Hydraulic Servo SystemДокумент7 страницThe Velocity Control of The Electro-Hydraulic Servo SystemInternational Journal of Research in Engineering and TechnologyОценок пока нет
- Dynamometer and Power Measurement: Work DoneДокумент20 страницDynamometer and Power Measurement: Work Donejung bi100% (3)
- Inertial Calcul PDFДокумент10 страницInertial Calcul PDFatesarikОценок пока нет
- Experment On Watt and Porter GovernorДокумент7 страницExperment On Watt and Porter GovernorAgare TubeОценок пока нет
- Experiment 7tomДокумент4 страницыExperiment 7tomAnsh JainОценок пока нет
- Vikram Singh A76 H4001Документ15 страницVikram Singh A76 H4001Vikram RakkarОценок пока нет
- Regulating Engine Speed with GovernorsДокумент10 страницRegulating Engine Speed with Governorsmike rosaОценок пока нет
- Module 7 GovernorДокумент30 страницModule 7 GovernorForgot PasswordОценок пока нет
- GovernorДокумент22 страницыGovernorfaizОценок пока нет
- Speed Governors Explained: Types, Components & CalculationsДокумент46 страницSpeed Governors Explained: Types, Components & CalculationsShashank JaiswalОценок пока нет
- Theory of Machine MEC219: Unit 5Документ89 страницTheory of Machine MEC219: Unit 5kunal jadhavОценок пока нет
- ChassisДокумент24 страницыChassisempu pacolОценок пока нет
- Semester Examination: B. Tech (Mechanical) (Semester-V) Dynamics of Machines (BTME503)Документ7 страницSemester Examination: B. Tech (Mechanical) (Semester-V) Dynamics of Machines (BTME503)hemant kumarОценок пока нет
- CEP of TOMДокумент17 страницCEP of TOMFaheem AbbasОценок пока нет
- Chapter 2 FlywheelДокумент24 страницыChapter 2 Flywheelshazwani zamriОценок пока нет
- Lecture 13Документ9 страницLecture 13Raja Awais Shaukat Kiyani 977-FET/BSME/F20Оценок пока нет
- M&MДокумент23 страницыM&MAnsuman SamalОценок пока нет
- Control Based Power Smoothing Submission PDFДокумент7 страницControl Based Power Smoothing Submission PDFMuh Wira Tri KusumaОценок пока нет
- Dynamics of Machinery: S.No Governors FlywheelДокумент87 страницDynamics of Machinery: S.No Governors Flywheelrukmini_ramkiОценок пока нет
- Unit 5 Whirling of Shaft and GovernorДокумент4 страницыUnit 5 Whirling of Shaft and GovernorSudipta NathОценок пока нет
- Crank Effort DiagramsДокумент4 страницыCrank Effort DiagramsDirajen PMОценок пока нет
- Servo MotorДокумент17 страницServo MotorAswathy SimonОценок пока нет
- Modeling and Control of Electromechanical Valve Actuator: Y. Wang, T. Megli, and M. HaghgooieДокумент10 страницModeling and Control of Electromechanical Valve Actuator: Y. Wang, T. Megli, and M. HaghgooieTushar KiranОценок пока нет
- Governor NotesДокумент19 страницGovernor NotesSailesh Bastol100% (2)
- Mechanical Power Transmission SystemsДокумент42 страницыMechanical Power Transmission SystemsEricОценок пока нет
- Slipper clutch improves motorcycle controlДокумент27 страницSlipper clutch improves motorcycle controljeyОценок пока нет
- مصدر التقرير الاحتراقДокумент45 страницمصدر التقرير الاحتراقياسر سعد حسونОценок пока нет
- MC 7 & 8Документ21 страницаMC 7 & 8dawitdafe4Оценок пока нет
- Samia Khalid AbdalqaderДокумент14 страницSamia Khalid AbdalqaderSamia KhalidОценок пока нет
- Basicprotectionandrelayingbysomaliajaldas 121126030037 Phpapp01Документ58 страницBasicprotectionandrelayingbysomaliajaldas 121126030037 Phpapp01randhir1112Оценок пока нет
- Articulated Boom Lift SafetyДокумент8 страницArticulated Boom Lift Safetyrandhir1112Оценок пока нет
- Os Exe3 23 May2011 SR I 776s21tr Lineprotection 120425095503 Phpapp02Документ39 страницOs Exe3 23 May2011 SR I 776s21tr Lineprotection 120425095503 Phpapp02randhir1112Оценок пока нет
- Articulated Boom Lift SafetyДокумент8 страницArticulated Boom Lift Safetyrandhir1112Оценок пока нет
- Excitation & AVRДокумент16 страницExcitation & AVRrandhir11120% (1)
- Sizing of Energy Storage For MicrogridДокумент19 страницSizing of Energy Storage For Microgridrandhir1112100% (1)
- 03 Fundamental TheoryДокумент13 страниц03 Fundamental TheoryPaul Alonso GonzálezОценок пока нет
- Guide for Selection of Turbine and Governing SystemДокумент96 страницGuide for Selection of Turbine and Governing SystemBehailu FelekeОценок пока нет
- Is 2705 1 1992Документ22 страницыIs 2705 1 1992Abhijeet DurgeОценок пока нет
- National Flag CodeДокумент17 страницNational Flag Coderandhir1112Оценок пока нет
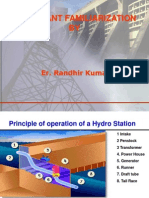
- How hydro power plants generate electricityДокумент45 страницHow hydro power plants generate electricityrandhir1112100% (1)
- Transformer Installation ManualДокумент38 страницTransformer Installation ManualbhsujanОценок пока нет
- CIGRE Report (Working Group A3.06)Документ4 страницыCIGRE Report (Working Group A3.06)randhir1112Оценок пока нет
- Lumen Method Calculation for Room Lighting DesignДокумент2 страницыLumen Method Calculation for Room Lighting Designrandhir1112Оценок пока нет
- IFS maintenance exercises guideДокумент19 страницIFS maintenance exercises guiderandhir1112Оценок пока нет
- Installation Testing Troubleshooting Starters Overload RelaysДокумент34 страницыInstallation Testing Troubleshooting Starters Overload RelaysGogula Gunasekhar100% (1)
- Construction Manual For Sub-StationsДокумент150 страницConstruction Manual For Sub-Stationspankaj_electrical0% (1)
- Digi ProДокумент32 страницыDigi Prorandhir1112Оценок пока нет