Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- CHRA Global OnlineДокумент6 страницCHRA Global Onlinezaidi100% (1)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- 1.1.1.5 Lab - Cybersecurity Case StudiesДокумент2 страницы1.1.1.5 Lab - Cybersecurity Case StudiesRizky Gumelar Atmaja0% (1)
- THE ROLE OF SOCIAL MEDIA LITERACY ON ACADEMIC PERFORMANCE OF SELECTED G12 STEM STUDENTS OF OLFU, QC. Chapter1Документ11 страницTHE ROLE OF SOCIAL MEDIA LITERACY ON ACADEMIC PERFORMANCE OF SELECTED G12 STEM STUDENTS OF OLFU, QC. Chapter1Joy PanesОценок пока нет
- Comparing Numbers Lesson PlanДокумент3 страницыComparing Numbers Lesson Planapi-234628168Оценок пока нет
- Paper 1: Organization & Management Fundamentals - Syllabus 2008 Evolution of Management ThoughtДокумент27 страницPaper 1: Organization & Management Fundamentals - Syllabus 2008 Evolution of Management ThoughtSoumya BanerjeeОценок пока нет
- Application of Game Theory in Organisational Conflict Resolution: The Case of NegotiationДокумент6 страницApplication of Game Theory in Organisational Conflict Resolution: The Case of NegotiationMiguel MazaОценок пока нет
- Cash Flow Risk and Capital Structure DecisionsДокумент17 страницCash Flow Risk and Capital Structure DecisionsMuhammad UsmanОценок пока нет
- A Study of Public Relations in Cathay PacificДокумент45 страницA Study of Public Relations in Cathay Pacificapi-3842687Оценок пока нет
- Biostatistics For BiotechnologyДокумент128 страницBiostatistics For Biotechnologykibiralew DestaОценок пока нет
- ChebyshevДокумент3 страницыChebyshevMajid Khammas NeamahОценок пока нет
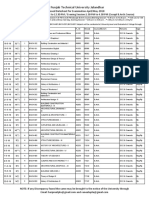
- Prposed Date Sheet Upload Web SiteДокумент154 страницыPrposed Date Sheet Upload Web SiteShaheer ShafatОценок пока нет
- A Project On A Statistical Analysis of The OTT Platform Business in Bangladesh-ReportДокумент24 страницыA Project On A Statistical Analysis of The OTT Platform Business in Bangladesh-ReportNayeem Ahamed AdorОценок пока нет
- ID Strategi Komunikasi Pemasaran Nestle Dancow Calcium Plus Sebagai Produk Baru DiДокумент14 страницID Strategi Komunikasi Pemasaran Nestle Dancow Calcium Plus Sebagai Produk Baru DicynthiaОценок пока нет
- Communications Role in Safety Management and PerfДокумент16 страницCommunications Role in Safety Management and PerfOsama SharafОценок пока нет
- Request For Proposal TemplateДокумент5 страницRequest For Proposal Templateehtasham50% (2)
- SCM201 - Ôn Quiz 2Документ38 страницSCM201 - Ôn Quiz 2Quỳnh Lê DiễmОценок пока нет
- CV Business Analyst SAPДокумент2 страницыCV Business Analyst SAPrajisgoodОценок пока нет
- Thesis Topics For Psychology Students in The PhilippinesДокумент5 страницThesis Topics For Psychology Students in The Philippinesdawnhendersonmobile100% (2)
- 86 PDFДокумент3 страницы86 PDFDian Raeza DitamiОценок пока нет
- 03 NCM 112 ER ToolДокумент2 страницы03 NCM 112 ER Toolerica dinglasanОценок пока нет
- Strategic Management Concept: Dr. Ir Moh Riza Sutjipto M.TДокумент9 страницStrategic Management Concept: Dr. Ir Moh Riza Sutjipto M.TDian Aulia RОценок пока нет
- O&M Module PDF File-1Документ177 страницO&M Module PDF File-1Strewbary BarquioОценок пока нет
- Tax Research MemoДокумент2 страницыTax Research MemoSeth9362767720% (1)
- Marketing Intelligence & Planning: Article InformationДокумент5 страницMarketing Intelligence & Planning: Article InformationAdrian SoareОценок пока нет
- CH 5 - Consumer Markets and Consumer Buyer BehaviorДокумент58 страницCH 5 - Consumer Markets and Consumer Buyer BehaviorMuhammad Shahbaz AkramОценок пока нет
- OCR-A-Level Psychology Study-Summaries Core-SampleДокумент15 страницOCR-A-Level Psychology Study-Summaries Core-SampleAyaОценок пока нет
- Assessment Techniques of Affective DomainДокумент32 страницыAssessment Techniques of Affective DomainSanthosh.S.UОценок пока нет
- Investigation of Pedestrian Safety A CasДокумент11 страницInvestigation of Pedestrian Safety A CasElijah Jane RiveraОценок пока нет
- The Interplay Between Technology and Humanity and Its Effect in The SocietyДокумент53 страницыThe Interplay Between Technology and Humanity and Its Effect in The SocietyXander EspirituОценок пока нет
- Full Details Chromite Mining and ProcessingДокумент12 страницFull Details Chromite Mining and ProcessingSameen BaberОценок пока нет